Model Predictive Stabilization Control of High-Speed Autonomous Ground Vehicles Considering the Effect of Road Topography


Abstract
:Featured Application
Abstract
1. Introduction
2. Preliminaries of MPC and Framework Overview
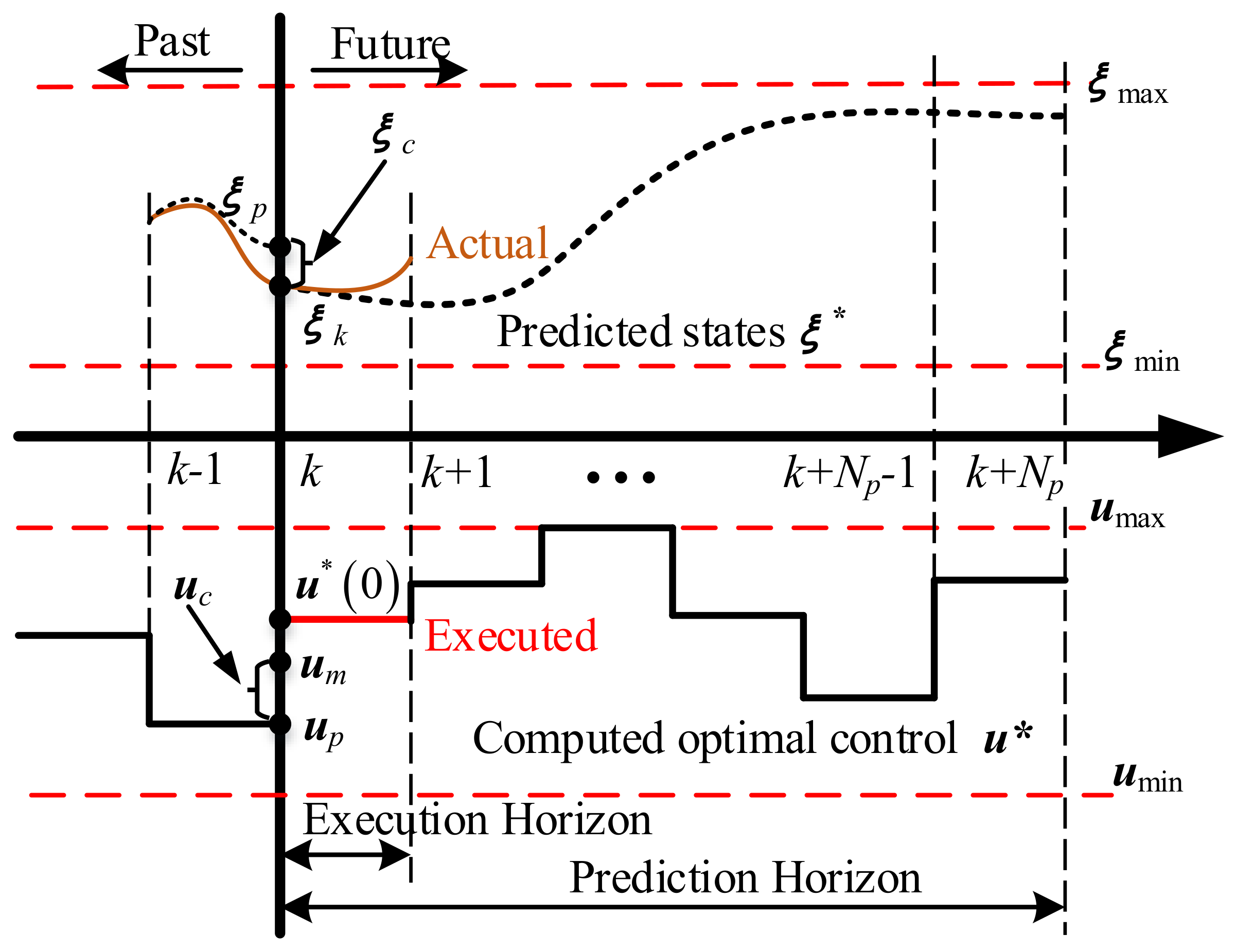
2.1. Preliminaries of MPC
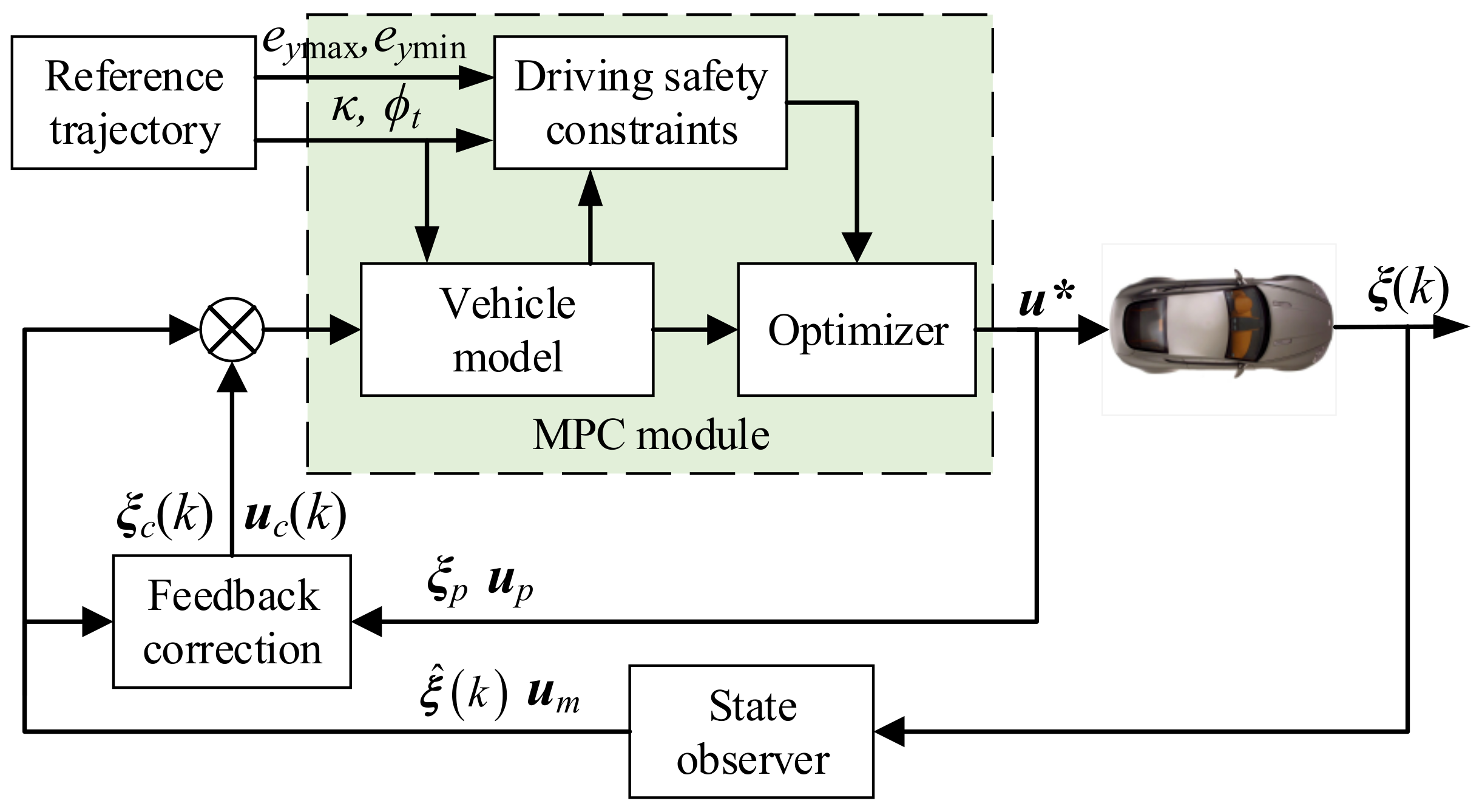
2.2. Framework Overview
3. Vehicle Dynamics Modeling and Discretization
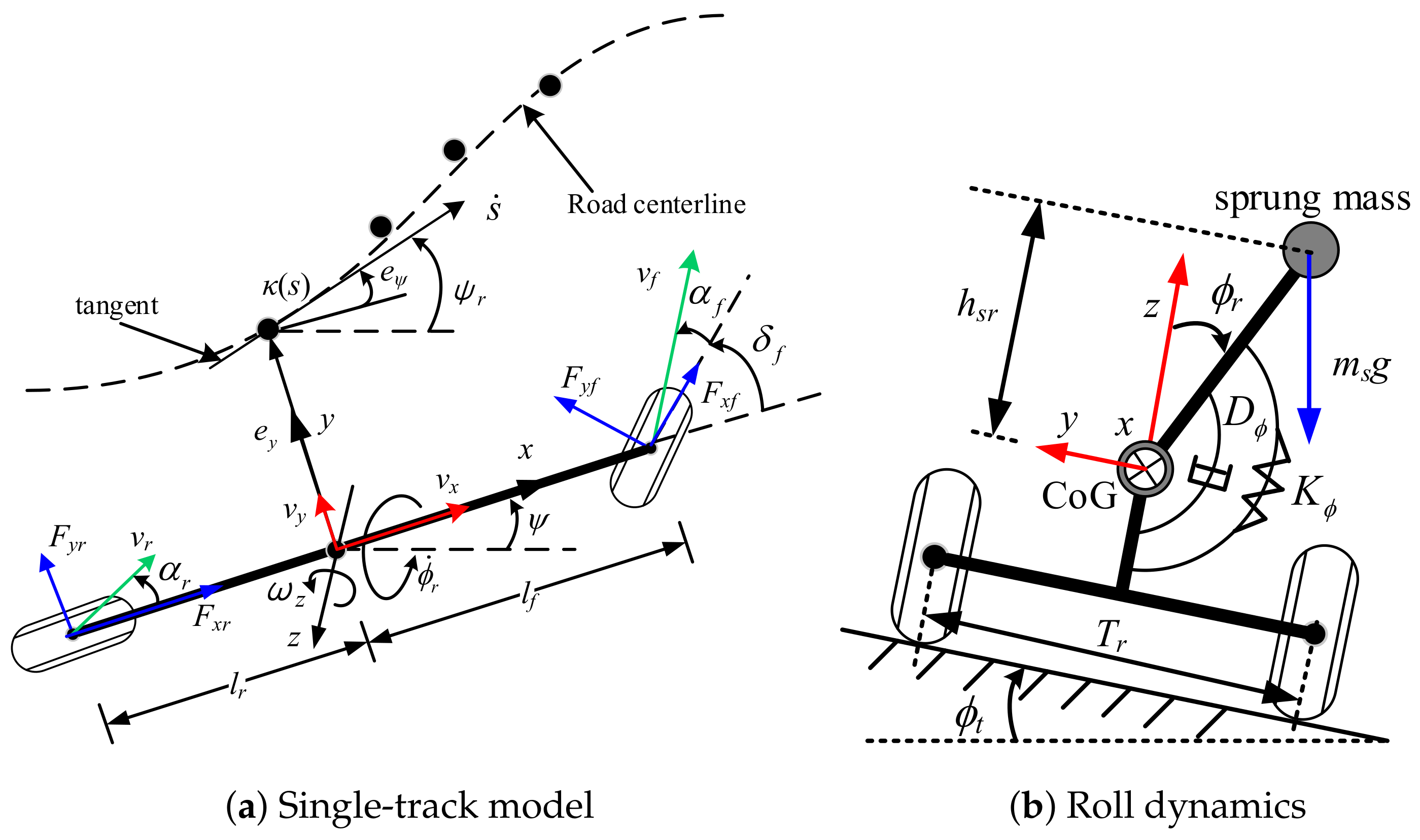
3.1. Dynamics Modeling
- , and satisfy the small angle assumption;
- The vehicle pitch/actuators dynamics can be neglected, and the steering system is rigid;
- The disturbances such as wind lateral thrust are not considered.
3.2. Model Discretization
4. MPC Scheme Design
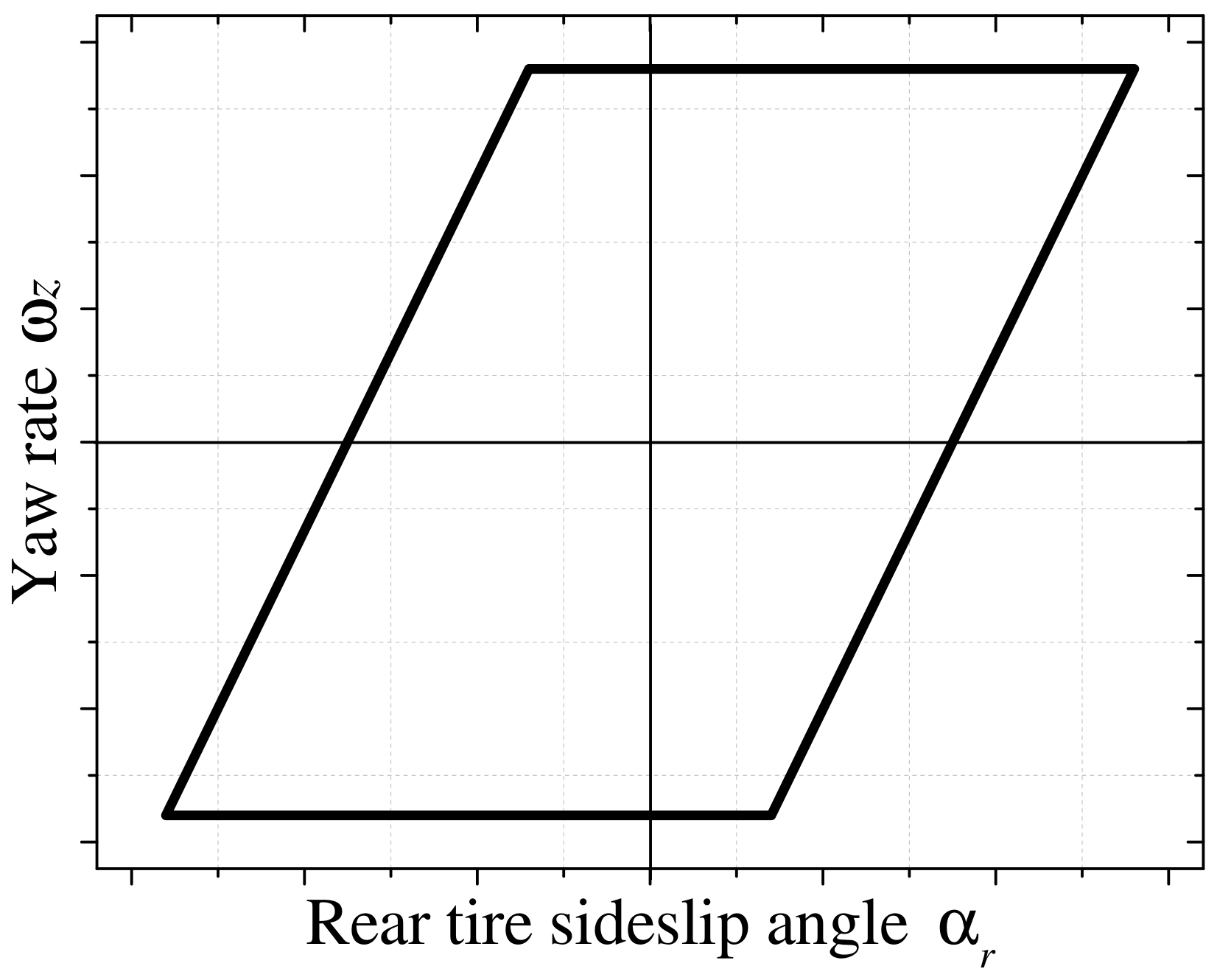
4.1. Sideslip Constraints
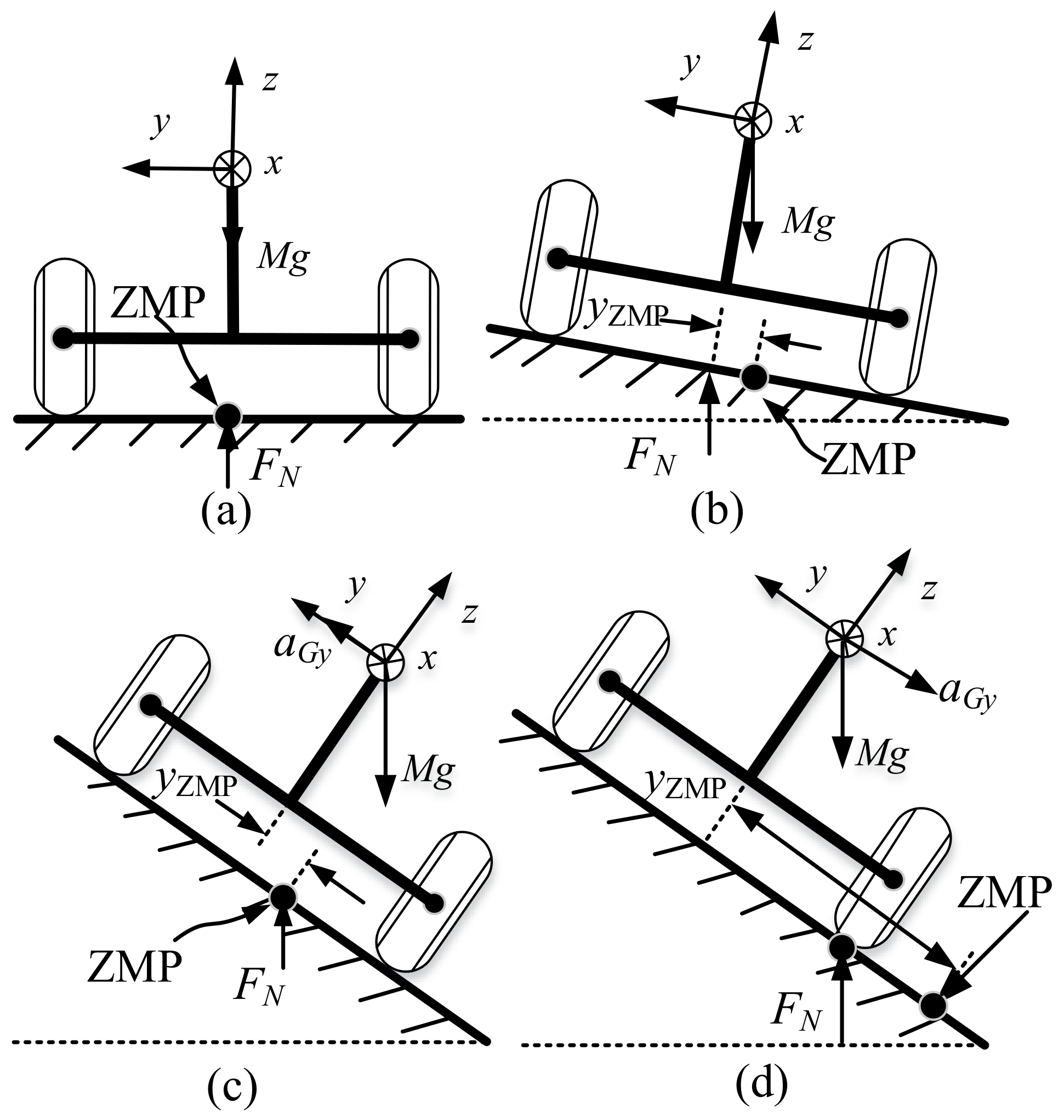
4.2. Rollover Constraints
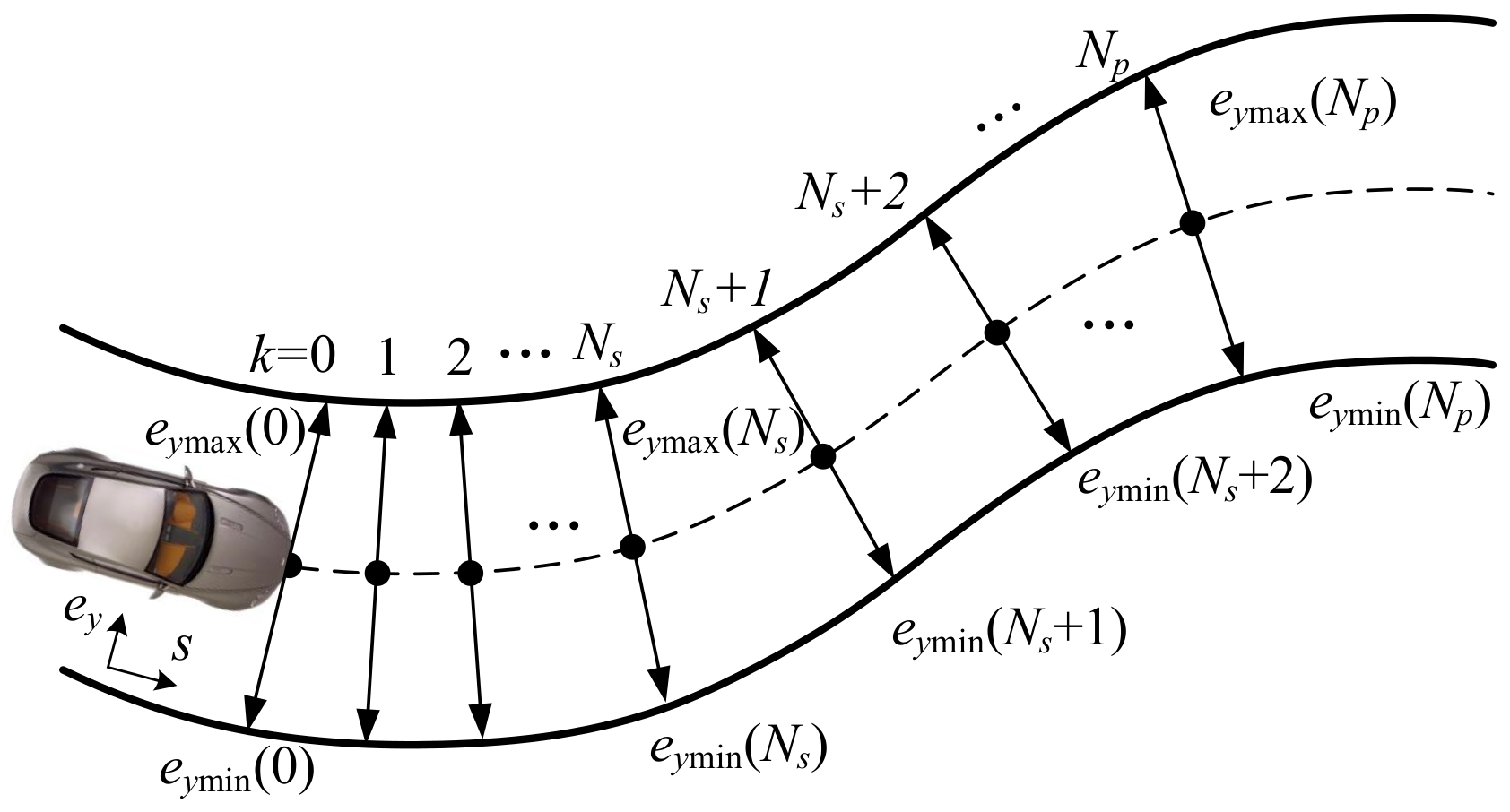
4.3. Lateral Safety Corridor
4.4. MPC Problem Formulation
5. Simulations and Discussions
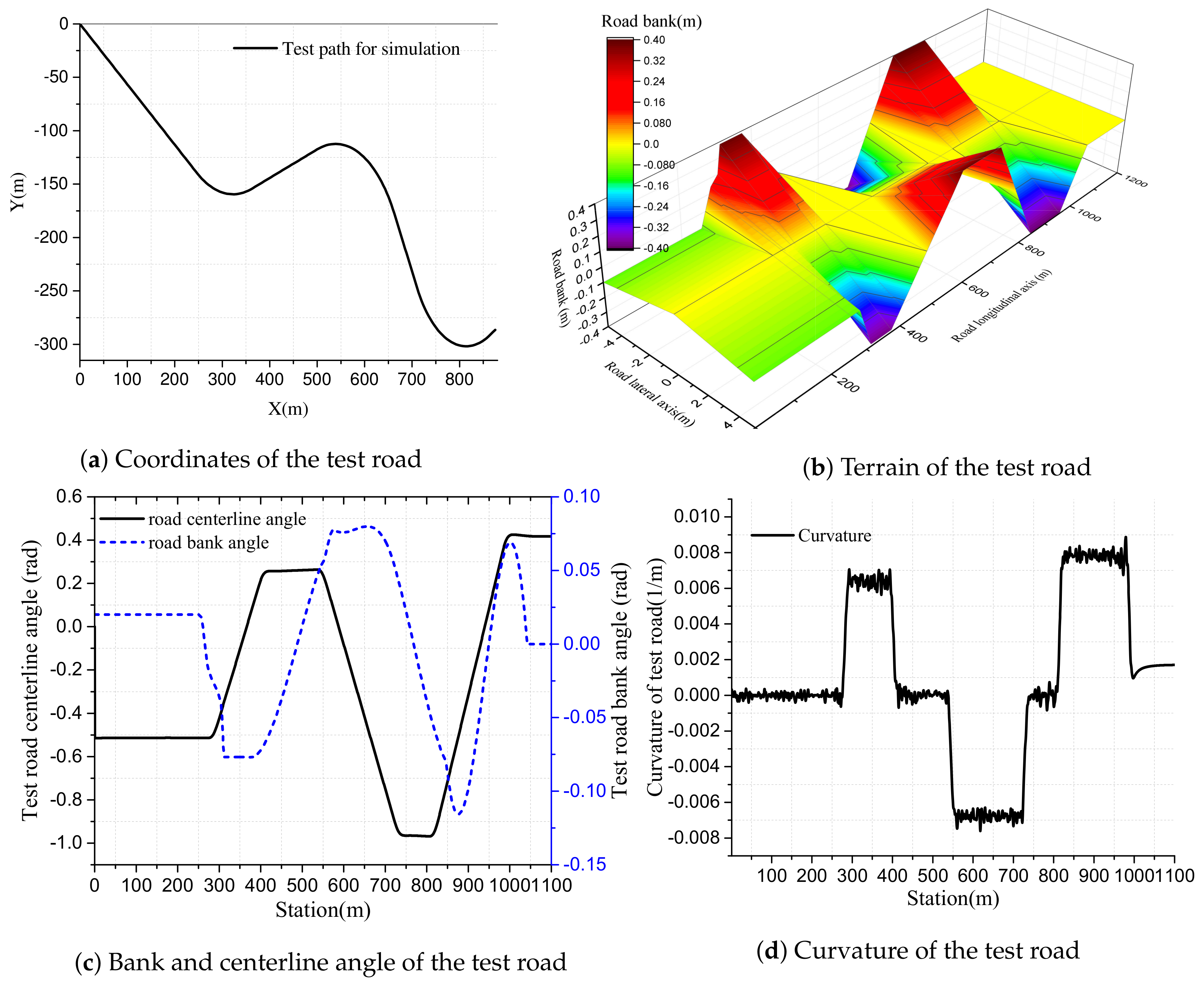
5.1. Simulation Settings
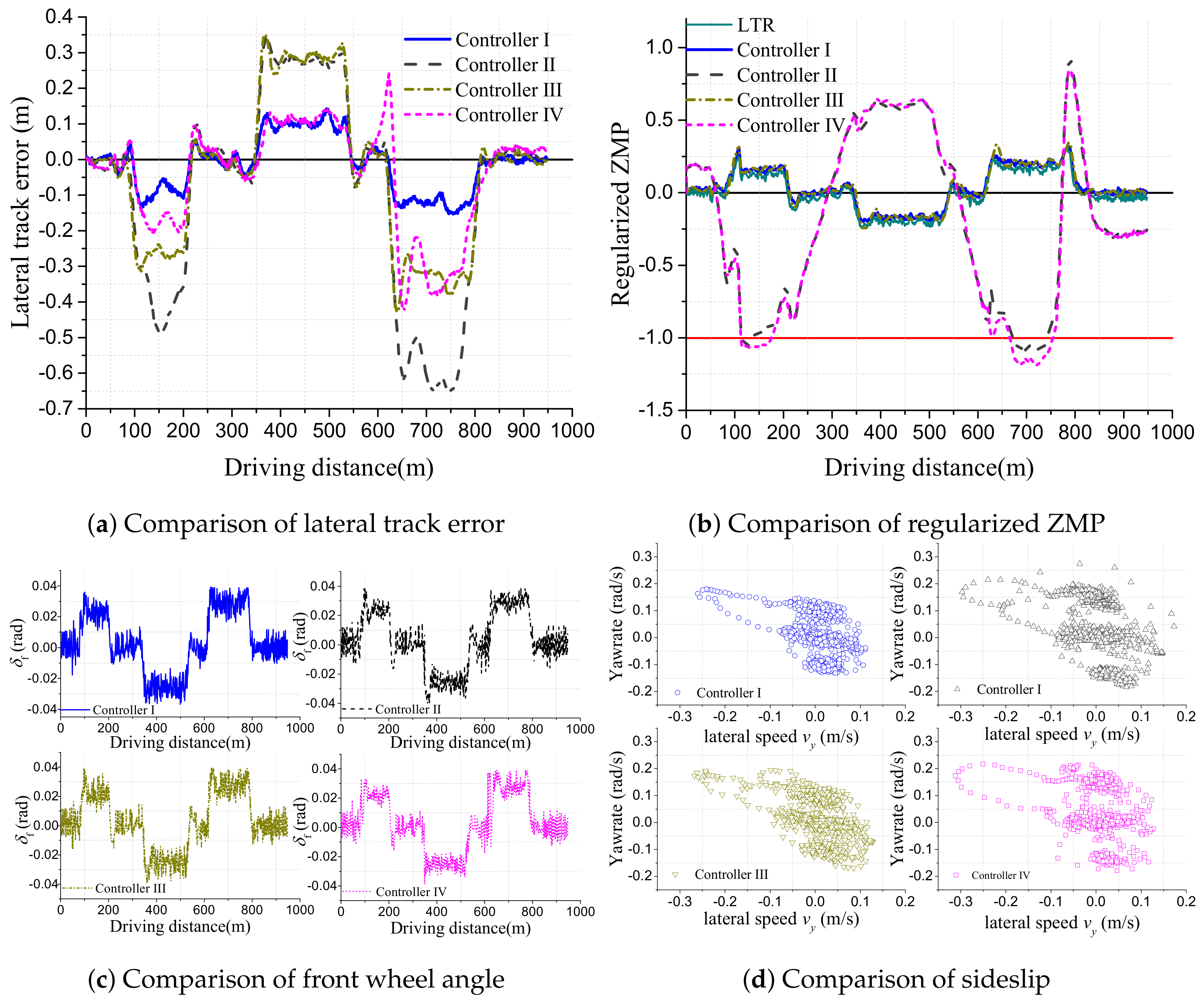
5.2. Performance Evaluation Considering Road Topography
- The MPC controller considers both road curvature and bank angle, as proposed in this work, denoted as Controller I;
- The MPC controller without consideration of road topography, i.e., setting , denoted as Controller II;
- The MPC controller only considers the effect of road bank angle, i.e., setting the second term of as zero, denoted as Controller III;
- The MPC controller only considers the effect of road curvature, i.e., setting the first term of as, denoted as Controller IV.
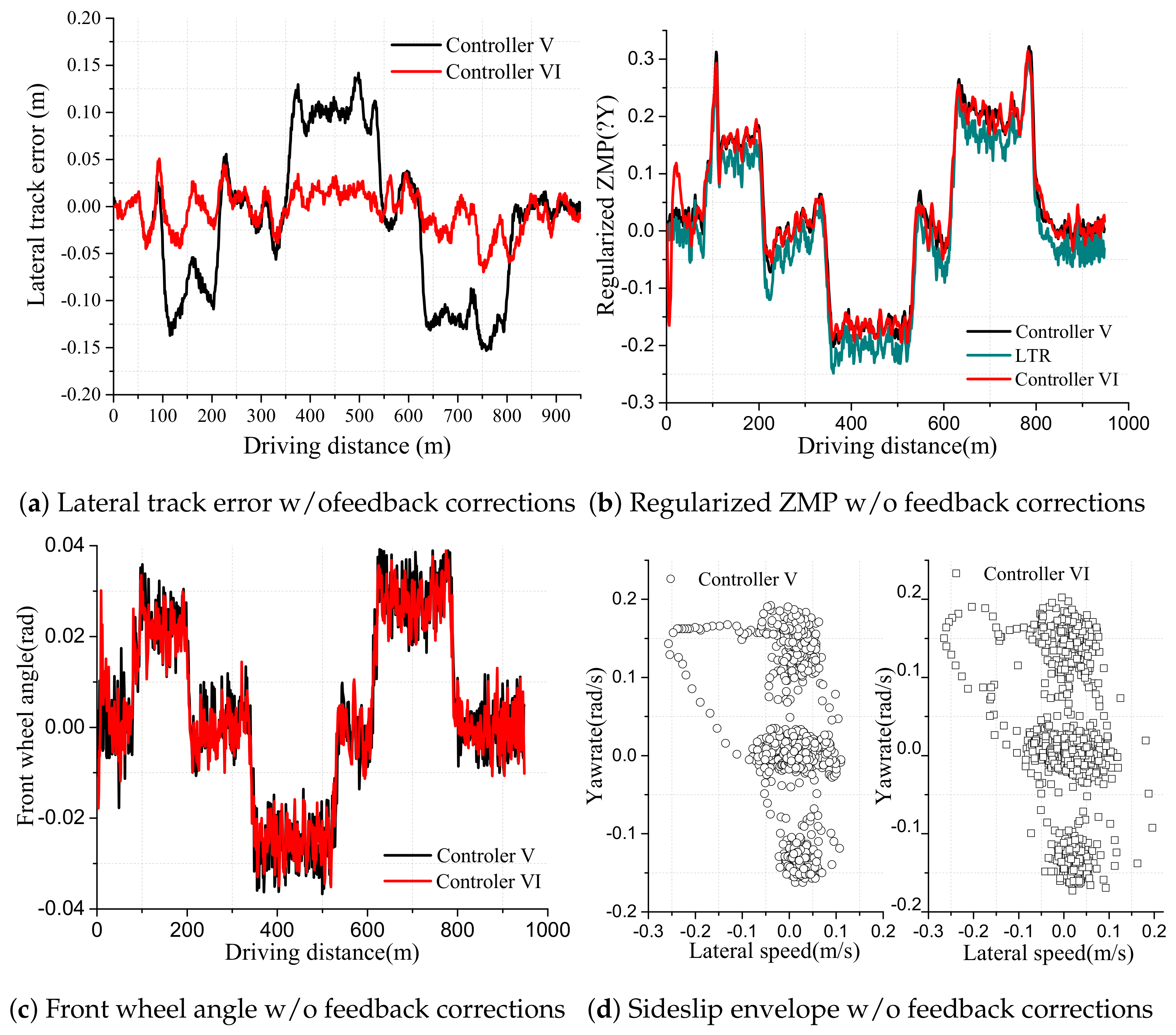
5.3. Performance Evaluation Considering Feedback Corrections
- MPC controller without feedback corrections, setting , denoted as Controller V;
- MPC controller with feedback corrections, as proposed in this work, denoted as Controller VI.
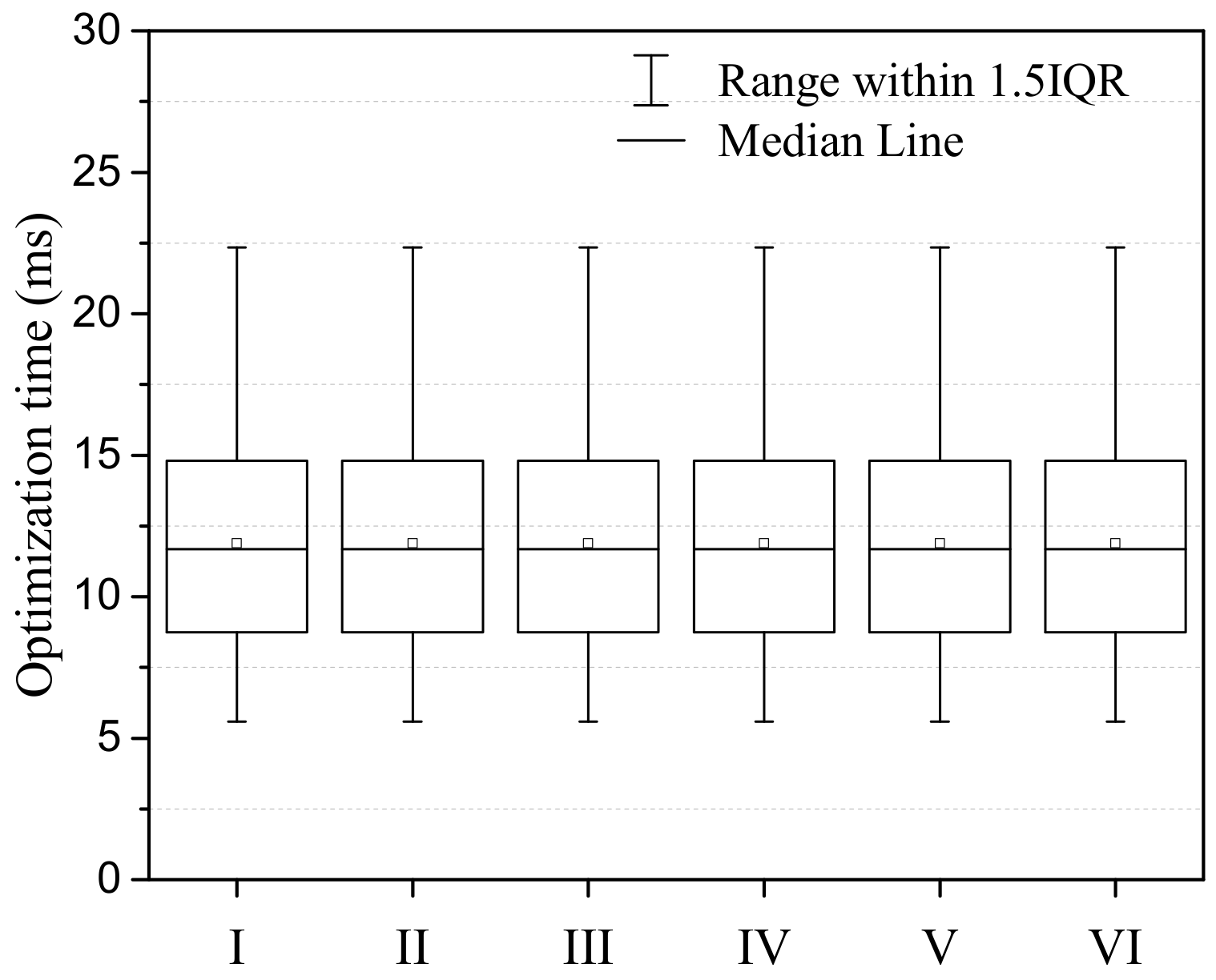
5.4. Real-Time Ability
6. Conclusions
- A vehicle model with roll dynamics is developed to account for the road curvature and bank angle. Variable time steps are utilized for model discretization, leading to long enough prediction for obstacle avoidance without compromising the prediction accuracy;
- The handling stability constraints, expressed as sideslip envelope and zero-moment-point, can be used to prevent excessive sideslip and rollover;
- An MPC control scheme is designed to generate the optimal steering sequence while satisfying the handling stability constraints. Comparative simulation results validate the effectiveness and real-time ability of the proposed control scheme.
Author Contributions
Funding
Conflicts of Interest
References
- Ozguner, U.; Acarman, T.; Redmill, K. Autonomous Ground Vehicles (Its); Artech House: Norwood, MA, USA, 2011; p. 277. [Google Scholar]
- Jiang, Y.; Gong, J.W.; Xiong, G.M.; Chen, H.Y. Research on differential constraints-based planning algorithm for autonomous-driving vehicles. Zidonghua Xuebao/Acta Autom. Sin. 2013, 39, 2012–2020. [Google Scholar] [CrossRef]
- Yan, J.; Qi, W.; Jianwei, G.; Huiyan, C. Research on Temporal Consistency and Robustness in Local Planning of Intelligent Vehicles. Acta Autom. Sin. 2015, 41, 518–527. [Google Scholar]
- Gong, J.; Jiang, Y.; Xu, W. Model Predictive Control for Self-Driving Vehicles; Beijing Institute of Technology Press: Beijing, China, 2014. [Google Scholar]
- Liu, K.; Gong, J.; Kurt, A.; Chen, H.; Ozguner, U. A model predictive-based approach for longitudinal control in autonomous driving with lateral interruptions. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 359–364. [Google Scholar] [CrossRef]
- Falcone, P.; Borrelli, F.; Asgari, J.; Tseng, H.E.; Hrovat, D. Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Trans. Control Syst. Technol. 2007, 15, 566–580. [Google Scholar] [CrossRef]
- Chen, S.L.; Cheng, C.Y.; Hu, J.S.; Jiang, J.F.; Chang, T.K.; Wei, H.Y. Strategy and Evaluation of Vehicle Collision Avoidance Control via Hardware-in-the-Loop Platform. Appl. Sci. 2016, 6, 327. [Google Scholar] [CrossRef]
- Zhang, R.; Li, K.; He, Z.; Wang, H.; You, F. Advanced Emergency Braking Control Based on a Nonlinear Model Predictive Algorithm for Intelligent Vehicles. Appl. Sci. 2017, 7. [Google Scholar] [CrossRef]
- Nilsson, J.; Brännström, M.; Coelingh, E.; Fredriksson, J. Lane Change Maneuvers for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1087–1096. [Google Scholar] [CrossRef]
- Brown, M.; Funke, J.; Erlien, S.; Gerdes, J.C. Safe driving envelopes for path tracking in autonomous vehicles. Control Eng. Pract. 2016. [Google Scholar] [CrossRef]
- Inagaki, S.; Kshiro, I.; Yamamoto, M. Analysis on vehicle stability in critical cornering using phase-plane method. In Proceedings of the International Symposium on Advanced Vehicle Control 1994, Budapest, Hungary, 8–10 June 1994. [Google Scholar]
- Anderson, S.J.; Peters, S.C.; Pilutti, T.E.; Iagnemma, K. An optimal-control-based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios. Int. J. Veh. Auton. Syst. 2010, 8, 190–216. [Google Scholar] [CrossRef]
- Bobier, C.G.; Gerdes, J.C. Envelope control: Stabilizing within the limits of handling using a sliding surface. In Proceedings of the 6th IFAC Symposium Advances in Automotive Control, 2010. IFAC Secretariat, Munich, Germany, 12–14 July 2010; pp. 162–167. [Google Scholar] [CrossRef]
- Beal, C.E.; Gerdes, J.C. Model predictive control for vehicle stabilization at the limits of handling. IEEE Trans. Control Syst. Technol. 2013, 21, 1258–1269. [Google Scholar] [CrossRef]
- Bobier, C.G.; Gerdes, J.C. Staying within the nullcline boundary for vehicle envelope control using a sliding surface. Veh. Syst. Dyn. 2013, 51, 199–217. [Google Scholar] [CrossRef]
- Katriniok, A.; Maschuw, J.P.; Christen, F.; Eckstein, L.; Abel, D. Optimal vehicle dynamics control for combined longitudinal and lateral autonomous vehicle guidance. In Proceedings of the IEEE European Control Conference, Zurich, Switzerland, 17–19 July 2013; pp. 974–979. [Google Scholar]
- Erlien, S.M.; Fujita, S.; Gerdes, J.C. Shared Steering Control Using Safe Envelopes for Obstacle Avoidance and Vehicle Stability. IEEE Trans. Intell. Transp. Syst. 2016, 17, 441–451. [Google Scholar] [CrossRef]
- Funke, J.; Brown, M.; Erlien, S.M.; Gerdes, J.C. Prioritizing collision avoidance and vehicle stabilization for autonomous vehicles. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, South Korea, 28 June–1 July 2015; pp. 1134–1139. [Google Scholar] [CrossRef]
- Funke, J.; Brown, M.; Erlien, S.M.; Gerdes, J.C. Collision Avoidance and Stabilization for Autonomous Vehicles in Emergency Scenarios. IEEE Trans. Control Syst. Technol. 2016, 1–13. [Google Scholar] [CrossRef]
- Subosits, J.; Gerdes, J.C. Autonomous vehicle control for emergency maneuvers: The effect of topography. In Proceedings of the American Control Conference (ACC), Hilton Palmer House, Chicago, 1–3 July 2015; pp. 1405–1410. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer: Minnesota, USA, 2006; p. 486. [Google Scholar]
- Shim, T.; Ghike, C. Understanding the limitations of different vehicle models for roll dynamics studies. Veh. Syst. Dyn. 2007, 45, 191–216. [Google Scholar] [CrossRef]
- Zhu, Q.; Ayalew, B. Predictive roll, handling and ride control of vehicles via active suspensions. In Proceedings of the American Control Conference, Portland, Oregon, 4–6 June 2014; pp. 2102–2107. [Google Scholar] [CrossRef]
- Peters, S.C.; Iagnemma, K. Stability measurement of high-speed vehicles. Veh. Syst. Dyn. 2009, 47, 701–720. [Google Scholar] [CrossRef]
- Parida, N.C.; Raha, S.; Ramani, A. Rollover-Preventive Force Synthesis at Active Suspensions in a Vehicle Performing a Severe Maneuver With Wheels Lifted Off. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2583–2594. [Google Scholar] [CrossRef]
- Bo-Chiuan, C.; Huei, P. Rollover warning for articulated heavy vehicles based on a time-to-rollover metric. J. Dyn. Syst. Meas. Control 2005, 127, 406–414. [Google Scholar] [CrossRef]
- Lapapong, S.; Brown, A.A.; Swanson, K.S.; Brennan, S.N. Zero-moment point determination of worst-case manoeuvres leading to vehicle wheel lift. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2012, 50, 191–214. [Google Scholar] [CrossRef]
- Peters, S.C.; Bobrow, J.E.; Iagnemma, K. Stabilizing a vehicle near rollover: An analogy to cart-pole stabilization. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) IEEE, Anchorage, AK, USA, 3–7 May 2010; pp. 5194–5200. [Google Scholar]
- Stankiewicz, P.G.; Brown, A.A.; Brennan, S.N. Preview Horizon Analysis for Vehicle Rollover Prevention Using the Zero-Moment Point. J. Dyn. Syst. Meas. Control 2015, 137. [Google Scholar] [CrossRef]
- Pacejka, H.B. Tyre and Vehicle Dynamics, 3rd ed.; Butterworth-Heinemann: Delft, The Netherland, 2006; p. 620. [Google Scholar]
- Mattingley, J.; Boyd, S. CVXGEN: A code generator for embedded convex optimization. Optim. Eng. 2012, 13, 1–27. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values (Unit) | Parameters | Values (Unit) | Parameters | Values (Unit) |
|---|---|---|---|---|---|
| m | 1600 (kg) | −110,000 (N/rad) | 0.05 (s) | ||
| 1430 (kg) | −92,000 (N/rad) | 0.5 (s) | |||
| 700. 7 (kg· m2) | 145,330 (N· m/rad) | 10 | |||
| 2059.2 (kg· m2) | 4500 (N· m· s/rad) | 20 | |||
| 1.12 (m) | g | 9.81 (m/s2) | 500 | ||
| 1.48 (m) | 0.4 (rad) | 50 | |||
| 1.565 (m) | 0.08 (rad/s) | 5 | |||
| 0.68 (m) | 0.1 (rad) | 0.5 | |||
| 0.5 (m) | 0.7 | 0.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Gong, J.; Chen, S.; Zhang, Y.; Chen, H. Model Predictive Stabilization Control of High-Speed Autonomous Ground Vehicles Considering the Effect of Road Topography. Appl. Sci. 2018, 8, 822. https://doi.org/10.3390/app8050822
Liu K, Gong J, Chen S, Zhang Y, Chen H. Model Predictive Stabilization Control of High-Speed Autonomous Ground Vehicles Considering the Effect of Road Topography. Applied Sciences. 2018; 8(5):822. https://doi.org/10.3390/app8050822
Chicago/Turabian StyleLiu, Kai, Jianwei Gong, Shuping Chen, Yu Zhang, and Huiyan Chen. 2018. "Model Predictive Stabilization Control of High-Speed Autonomous Ground Vehicles Considering the Effect of Road Topography" Applied Sciences 8, no. 5: 822. https://doi.org/10.3390/app8050822
APA StyleLiu, K., Gong, J., Chen, S., Zhang, Y., & Chen, H. (2018). Model Predictive Stabilization Control of High-Speed Autonomous Ground Vehicles Considering the Effect of Road Topography. Applied Sciences, 8(5), 822. https://doi.org/10.3390/app8050822