Tensile Strength of Silicon Nanowires Batch-Fabricated into Electrostatic MEMS Testing Device



Abstract
:Featured Application
Abstract

1. Introduction
- No interface between a MEMS device structure and a SiNW;
- Perfect alignment; and
- Free from a complicated and time-consuming assembly process.
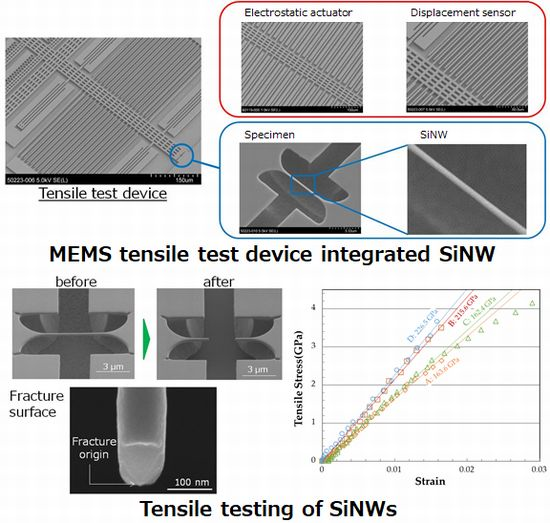
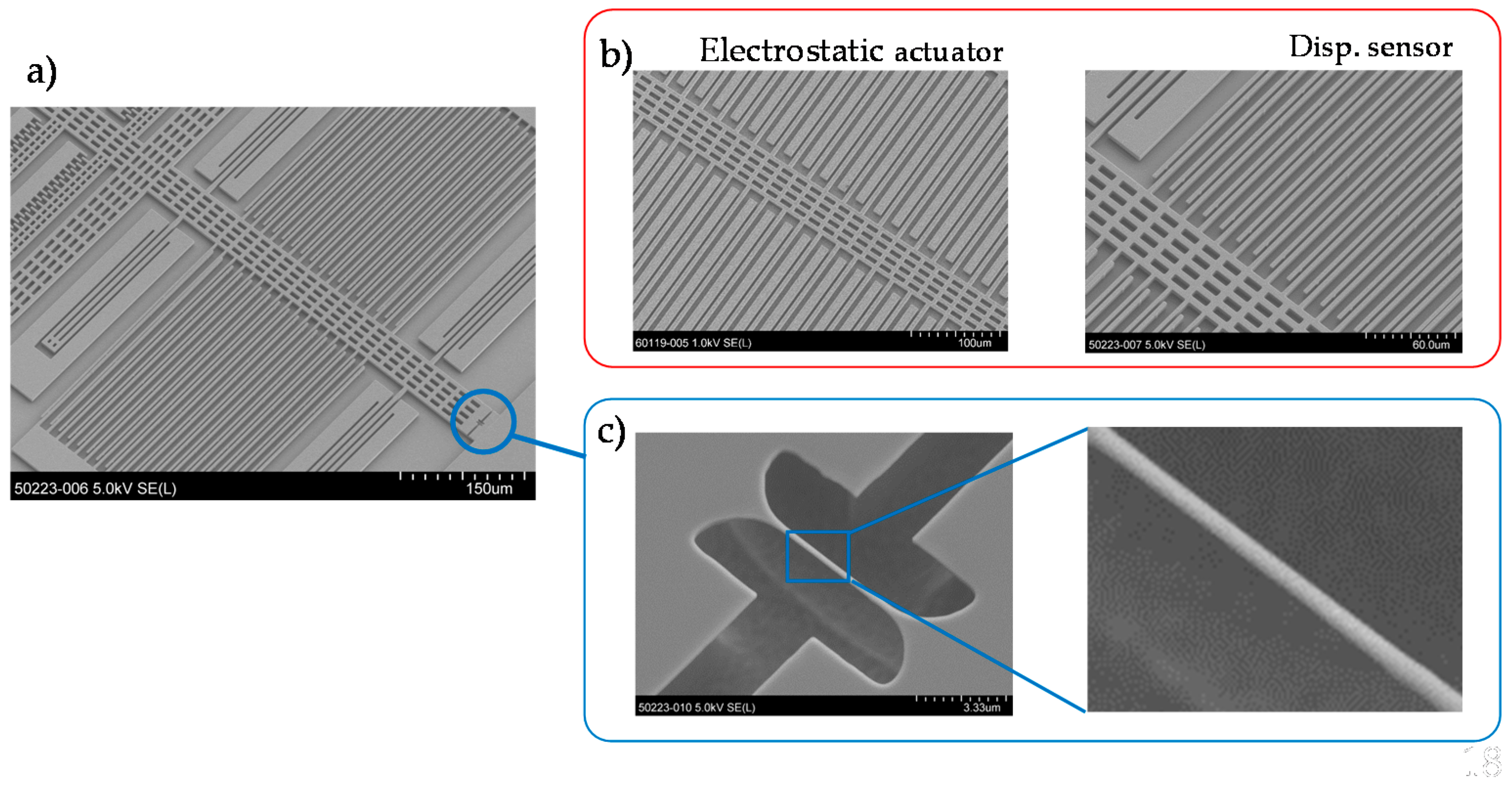
2. MEMS Tensile Testing Device with SiNW
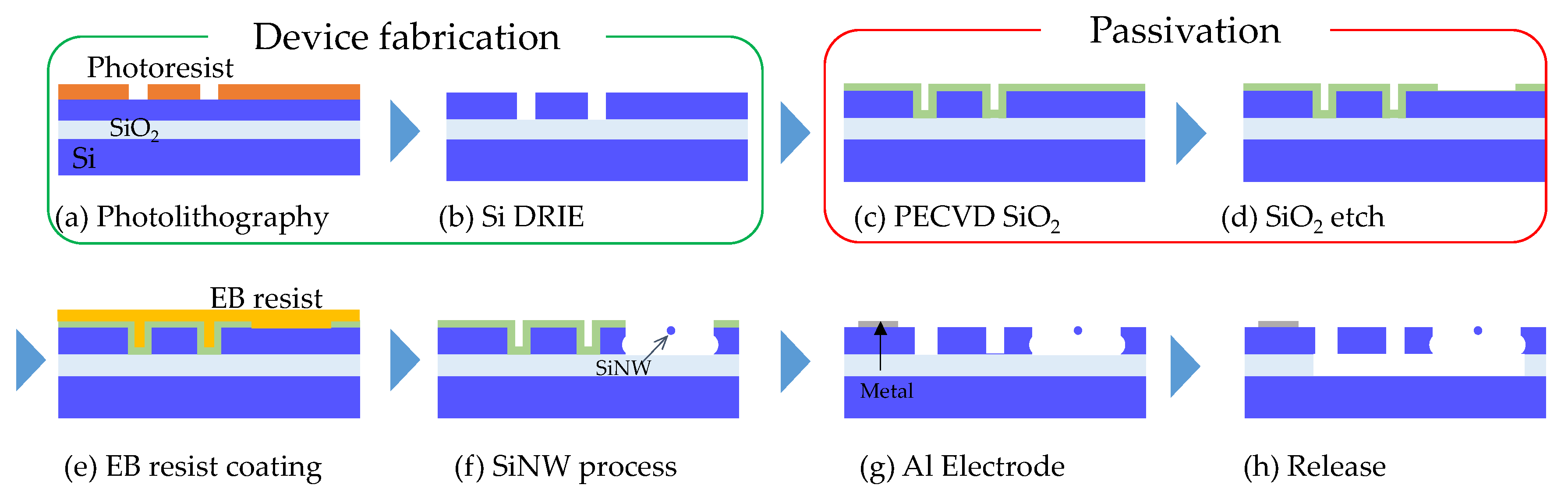
3. Fabrication
3.1. Device Structure
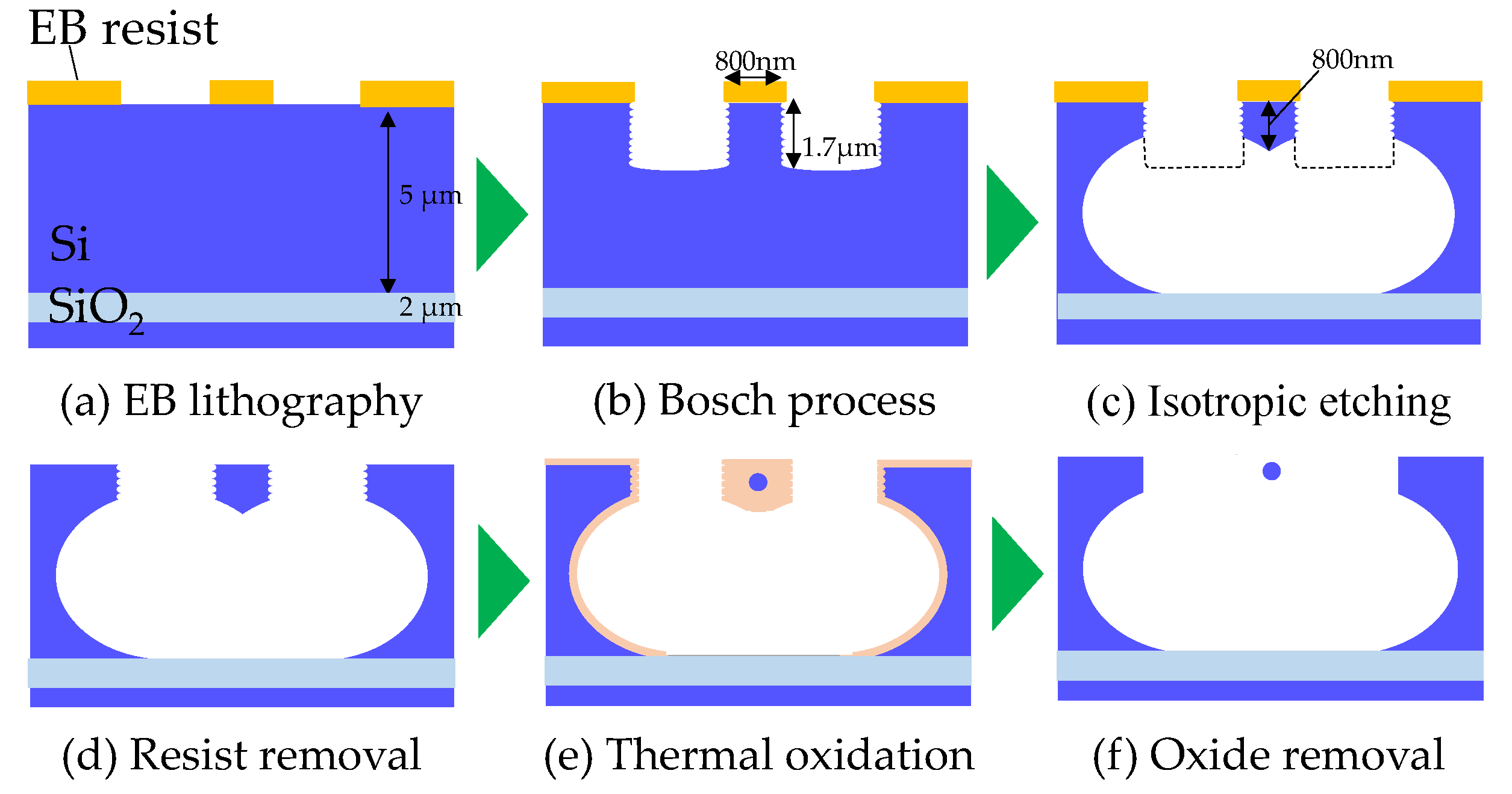
3.2. SiNW Fabrication
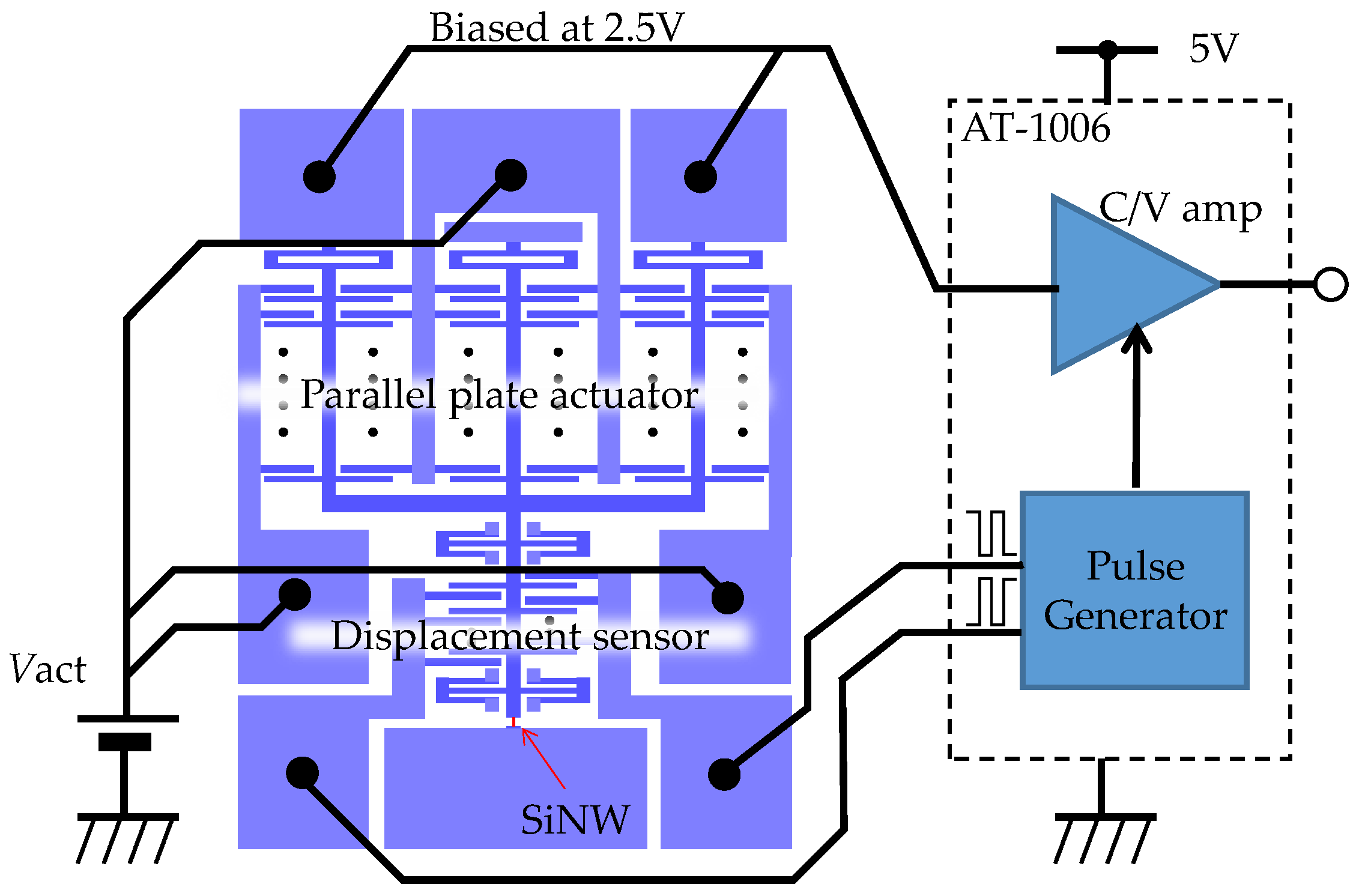
4. Measurement Procedure
5. Results
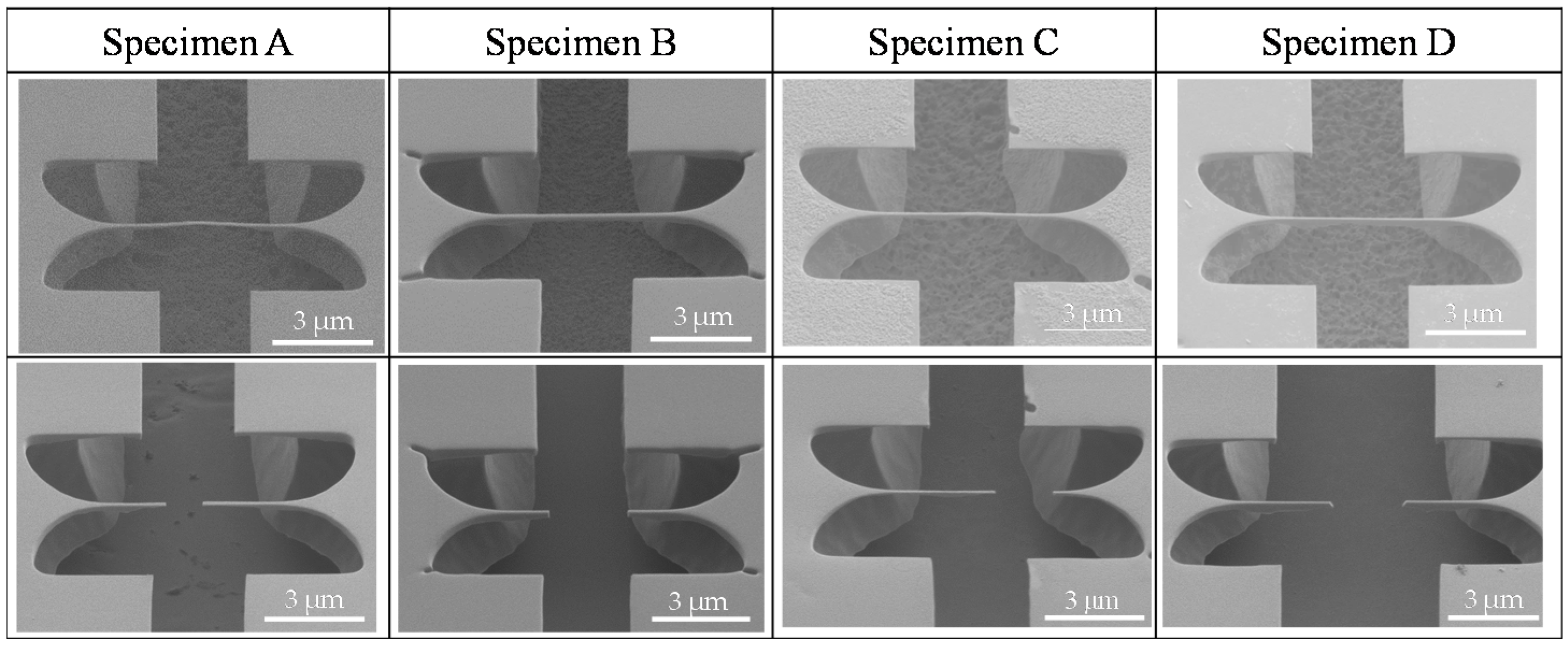
5.1. SiNW Device Fabrication
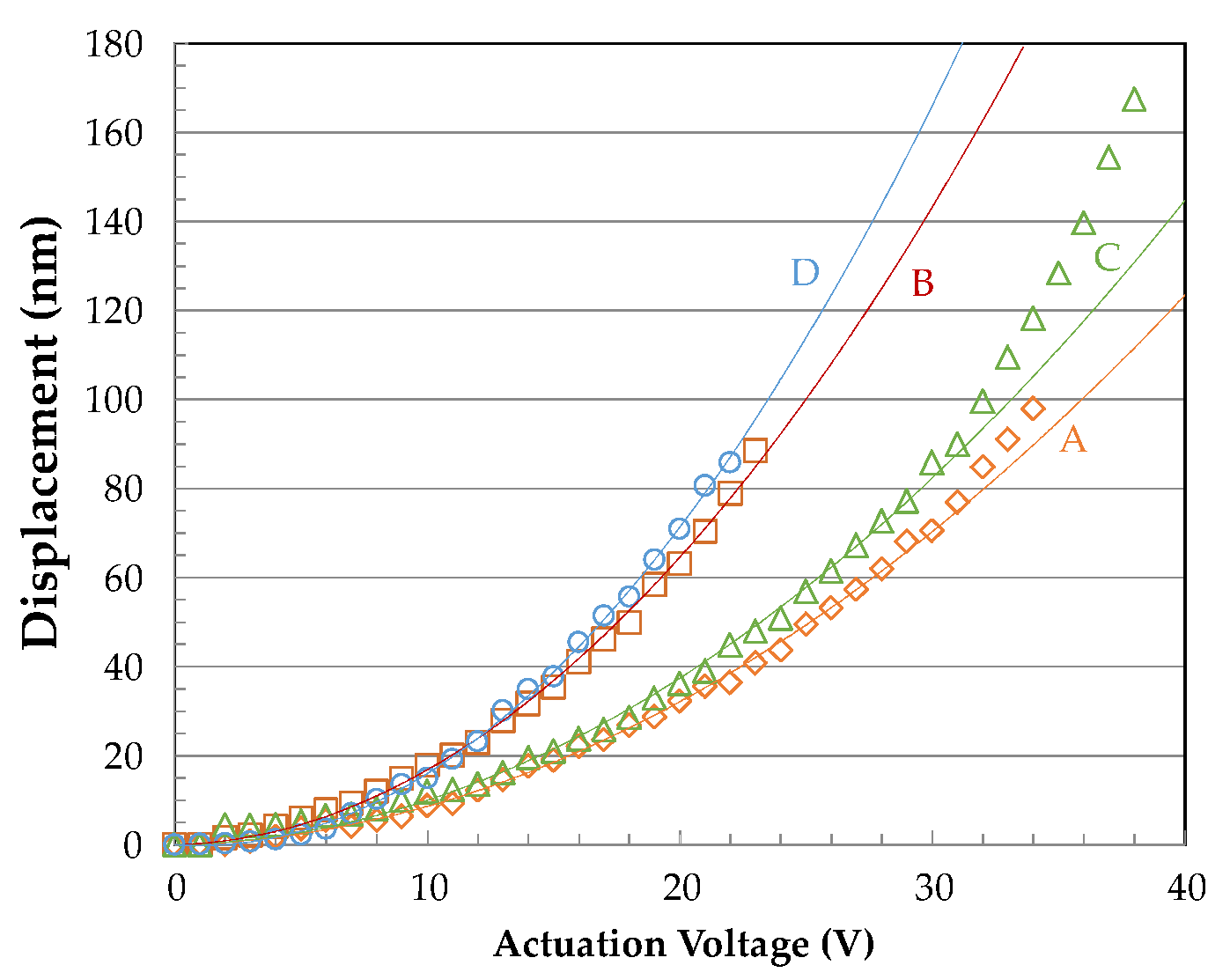
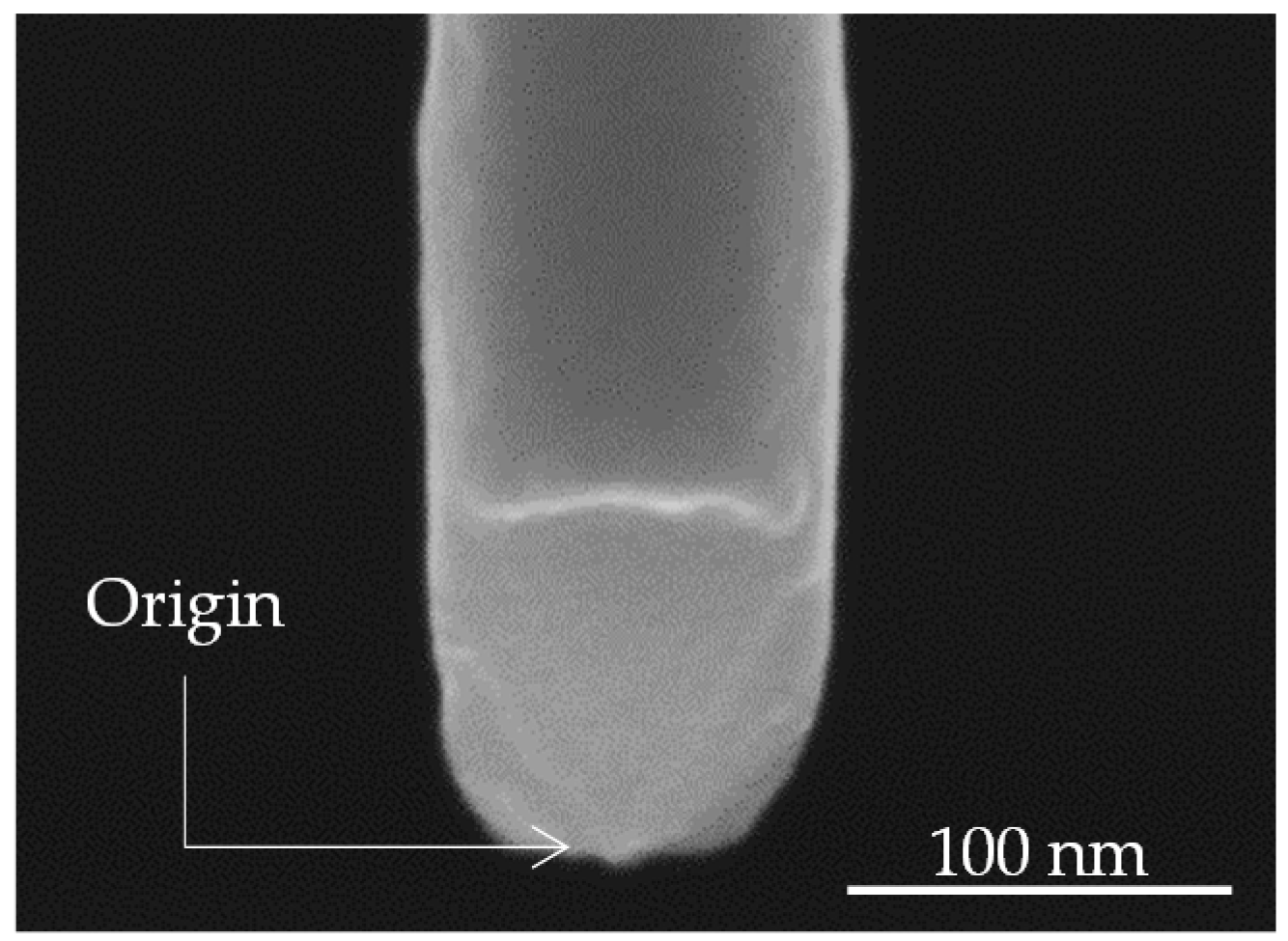
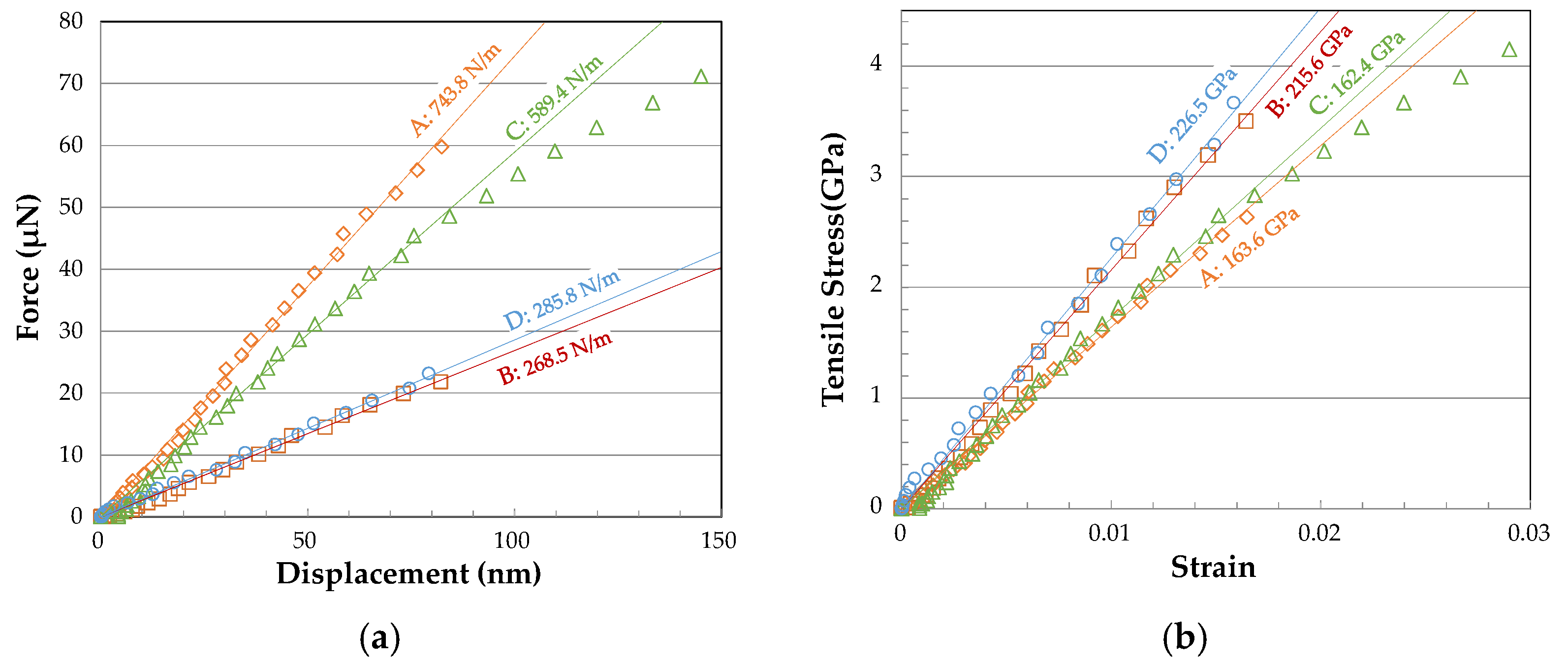
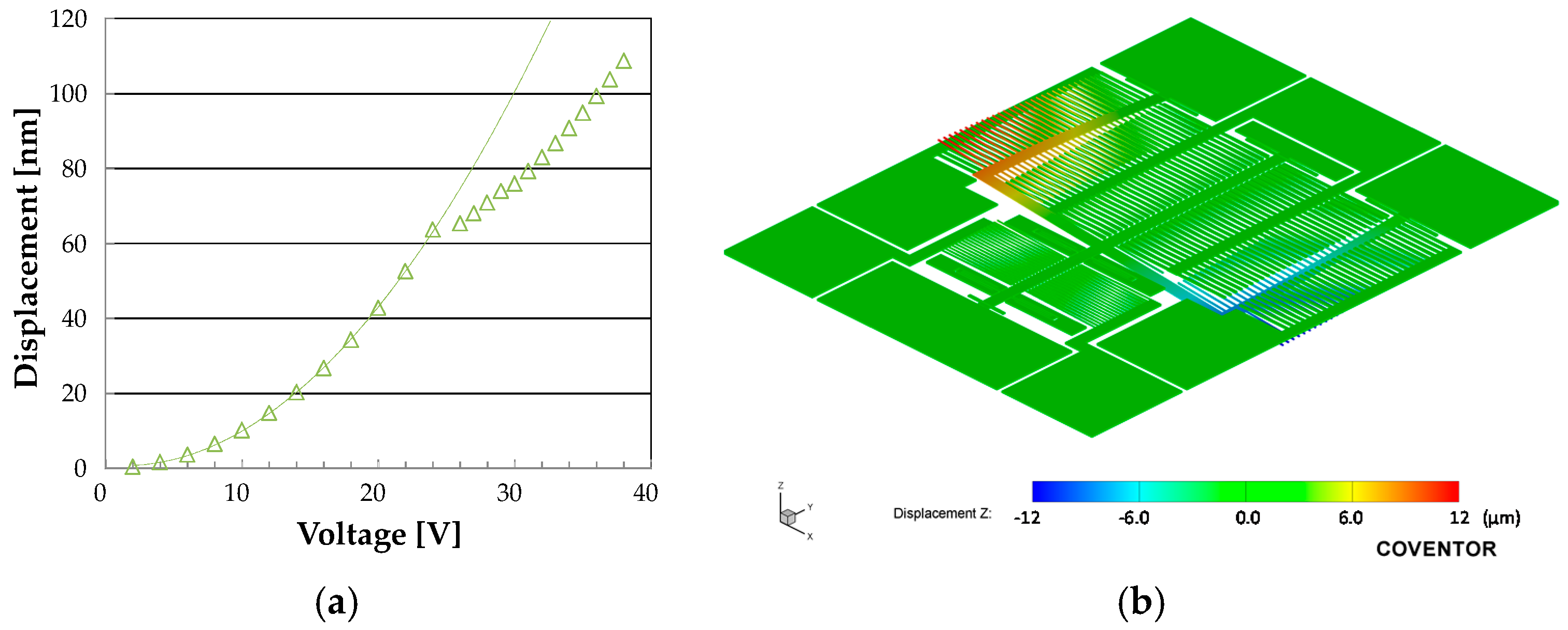
5.2. Tensile Testing
6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Smith, A.D.; Niklaus, F.; Paussa, A.; Vaziri, S.; Fischer, A.C.; Sterner, M.; Forsberg, F.; Delin, A.; Esseni, D.; Palestri, P.; et al. Electromechanical piezoresistive sensing in suspended graphene membranes. Nano Lett. 2013, 13, 3237–3242. [Google Scholar] [CrossRef] [PubMed]
- Sayed, S.; Gamil, M.; El-Bab, A.F.; Nakamura, K.; Tsuchiya, T.; Tabata, O.; El-Moneim, A.A. Graphene film development on flexible substrate using a new technique: Temperature dependency of gauge factor for graphene-based strain sensors. Sens. Rev. 2016, 36, 140–147. [Google Scholar] [CrossRef]
- Lee, S.-W.; Muoth, M.; Hierold, C. Photomask-based integration process of low-defect suspended carbon nanotubes into SOI MEMS. Nanotechnology 2014, 25, 215301. [Google Scholar] [CrossRef] [PubMed]
- Shiomi, Y.; Hirai, Y.; Tabata, O.; Tsuchiya, T. High-yield bridged assembly of ssDNA-modified SWCNT using dielectrophoresis. Int. J. Autom. Technol. 2018, 12, 29–36. [Google Scholar] [CrossRef]
- Tsuchiya, T.; Ura, Y.; Sugano, K.; Tabata, O. Electrostatic tensile testing device with nanonewton and nanometer resolution and its application to C60 nanowire testing. J. Microelectromech. Syst. 2012, 21, 523–529. [Google Scholar] [CrossRef]
- Bai, J.; Ma, T.; Chu, W.; Wang, R.; Silva, L.; Michal, C.; Chiao, J.C.; Chiao, M. Regenerated spider silk as a new biomaterial for MEMS. Biomed. Microdevices 2006, 8, 317–323. [Google Scholar] [CrossRef] [PubMed]
- Funakoshi, K.; Suzuki, H.; Takeuchi, S. Lipid bilayer formation by contacting monolayers in a microfluidic device for membrane protein analysis. Anal. Chem. 2006, 78, 8169–8174. [Google Scholar] [CrossRef] [PubMed]
- Malmstadt, N.; Nash, M.A.; Purnell, R.F.; Schmidt, J.J. Automated formation of lipid-bilayer membranes in a microfluidic device. Nano Lett. 2006, 6, 1961–1965. [Google Scholar] [CrossRef] [PubMed]
- Yamahata, C.; Collard, D.; Legrand, B.; Takekawa, T.; Kumemura, M.; Hashiguchi, G.; Fujita, H. Silicon nanotweezers with subnanometer resolution for the micromanipulation of biomolecules. J. Microelectromech. Syst. 2008, 17, 623–631. [Google Scholar] [CrossRef]
- Akishiba, T.; Tamura, N.; Ichii, T.; Hirai, Y.; Sugano, K.; Tsuchiya, T.; Sugimura, H.; Tabata, O. DNA origami assembly on patterned silicon by AFM based lithography. In Proceedings of the 26th IEEE International Conference on Micro Electro Mechanical Systems (MEMS 2013), Taipei, Taiwan, 20–24 January 2013; pp. 307–310. [Google Scholar]
- Takeshita, T.; Suekuni, K.; Aiba, K.; Sugano, K.; Isono, Y. Surface-Enhanced Raman Spectroscopy Analysis Device with Gold Nanoparticle Arranged Nanochannel. Electron. Commun. Jpn. 2017, 100, 33–41. [Google Scholar] [CrossRef]
- Schwalb, C.H.; Grimm, C.; Baranowski, M.; Sachser, R.; Porrati, F.; Reith, H.; Das, P.; Müller, J.; Völklein, F.; Kaya, A.; et al. A tunable strain sensor using nanogranular metals. Sensors 2010, 10, 9847–9856. [Google Scholar] [CrossRef] [PubMed]
- Peng, K.; Xu, Y.; Wu, Y.; Yan, Y.; Lee, S.-T.; Zhu, J. Aligned single-crystalline Si nanowire arrays for photovoltaic applications. Small 2005, 1, 1062–1067. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Chen, Y.; Li, X.; Kamins, T.I.; Nauka, K.; Williams, R.S. Sequence-Specific Label-Free DNA Sensors Based on Silicon Nanowires. Nano Lett. 2004, 4, 245–247. [Google Scholar] [CrossRef]
- Feng, X.L.; He, R.; Yang, P.; Roukes, M.L. Very high frequency silicon nanowire electromechanical resonators. Nano Lett. 2007, 7, 1953–1959. [Google Scholar] [CrossRef]
- Cui, Y.; Wei, Q.; Park, H.; Lieber, C.M. Nanowire nanosensors for highly sensitive and selective detection of biological and chemical species. Science 2001, 293, 1289–1292. [Google Scholar] [CrossRef] [PubMed]
- Toriyama, T.; Tanimoto, Y.; Sugiyama, S. Single crystal silicon nano-wire piezoresistors for mechanical sensors. J. Microelectromech. Syst. 2002, 11, 605–611. [Google Scholar] [CrossRef]
- He, R.; Feng, X.L.; Roukes, M.L.; Yang, P. Self-transducing silicon nanowire electromechanical systems at room temperature. Nano Lett. 2008, 8, 1756–1761. [Google Scholar] [CrossRef] [PubMed]
- Robert, P.; Nguyen, V.; Hentz, S.; Duraffourg, L.; Jourdan, G.; Arcamone, J.; Harrisson, S. M&NEMS: A new approach for ultra-low cost 3D inertial sensor. In Proceedings of the IEEE Sensors (SENSORS 2009), Christchurch, New Zealand, 25–28 October 2009; pp. 963–966. [Google Scholar] [CrossRef]
- Fujii, T.; Sudoh, K.; Inoue, S.; Namazu, T. Design and development of electrostatically driven uniaxial tensile test device for silicon nanowires. Sens. Mater. 2016, 28, 89–102. [Google Scholar] [CrossRef]
- Zhang, D.; Breguet, J.M.; Clavel, R.; Sivakov, V.; Christiansen, S.; Johann Michler, J. In situ electron microscopy mechanical testing of silicon nanowires using electrostatically actuated tensile stages. J. Microelectromech. Syst. 2010, 19, 663–673. [Google Scholar] [CrossRef]
- Zhu, Y.; Xu, F.; Qin, Q.; Fung, W.Y.; Lu, W. Mechanical properties of Vapor−Liquid−Solid synthesized silico nanowires. Nano Lett. 2009, 9, 3934–3939. [Google Scholar] [CrossRef] [PubMed]
- Tsuchiya, T.; Hemmi, T.; Suzuki, J.; Hirai, Y.; Tabata, O. Tensile fracture of integrated single-crystal silicon nanowire using MEMS electrostatic testing device. Procedia Struct. Integr. 2016, 2, 1405–1412. [Google Scholar] [CrossRef]
- Kedzierski, J.; Bokor, J. Fabrication of planar silicon nanowires on silicon-on-insulator using stress limited oxidation. J. Vac. Sci. Technol. B 1997, 15, 2825–2828. [Google Scholar] [CrossRef]
- Liu, H.I.; Biegelsen, D.K.; Ponce, F.A.; Johnson, N.M.; Pease, R.F.W. Self limiting oxidation for fabricating sub 5 nm silicon nanowires. Appl. Phys. Lett. 1994, 64, 1383–1385. [Google Scholar] [CrossRef]
- Deal, B.E.; Grove, A.S. General Relationship for the Thermal Oxidation of Silicon. J. Appl. Phys. 1965, 36, 3770–3778. [Google Scholar] [CrossRef]
- Uesugi, A.; Hirai, Y.; Sugano, K.; Tsuchiya, T.; Tabata, O. Effect of crystallographic orientation on tensile fractures of (100) and (110) silicon microstructures fabricated from SOI wafers. Micro Nano Lett. 2015, 10, 678–682. [Google Scholar] [CrossRef] [Green Version]
- Tsuchiya, T.; Miyamoto, K.; Sugano, K.; Tabata, O. Fracture behavior of single crystal silicon with thermal oxide layer. Eng. Fract. Mech. 2016, 163, 523–532. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specimen | A | B | C | D |
|---|---|---|---|---|
| Device design | type 1 | type 2 | type 2 | type 1 |
| First oxidation time (min) | 480 | 360 | 360 | 360 |
| Second oxidation time (min) | - | 40 | 30 | 40 |
| Specimen width (nm) | 188 | 128 | 103 | 142 |
| Linewidth reduction (nm) | 387 | 330 | 353 | 361 |
| Specimen | A | B | C | D |
|---|---|---|---|---|
| Displacement sensitivity (V/μm) | 11.4 | 10.5 | 11.7 | 13.3 |
| Voltage fractured (V) | 35 | 23 | 38 | 22 |
| Estimated stiffness of tapered part (N/m) | 9452 | 4870 | 6375 | 6959 |
| Stiffness of specimen (N/m) | 742.4 | 268.5 | 590.5 | 285.8 |
| Measured width (nm) | 190 | 130 | 106 | 134 |
| Measured thickness (nm) | 152 | 61 | 206 | 60 |
| Young’s modulus (GPa) | 163.6 | 215.6 | 162.4 | 226.5 |
| Tensile strength (GPa) | 2.6 | 3.5 | 4.1 | 3.7 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsuchiya, T.; Hemmi, T.; Suzuki, J.-y.; Hirai, Y.; Tabata, O. Tensile Strength of Silicon Nanowires Batch-Fabricated into Electrostatic MEMS Testing Device. Appl. Sci. 2018, 8, 880. https://doi.org/10.3390/app8060880
Tsuchiya T, Hemmi T, Suzuki J-y, Hirai Y, Tabata O. Tensile Strength of Silicon Nanowires Batch-Fabricated into Electrostatic MEMS Testing Device. Applied Sciences. 2018; 8(6):880. https://doi.org/10.3390/app8060880
Chicago/Turabian StyleTsuchiya, Toshiyuki, Tetsuya Hemmi, Jun-ya Suzuki, Yoshikazu Hirai, and Osamu Tabata. 2018. "Tensile Strength of Silicon Nanowires Batch-Fabricated into Electrostatic MEMS Testing Device" Applied Sciences 8, no. 6: 880. https://doi.org/10.3390/app8060880
APA StyleTsuchiya, T., Hemmi, T., Suzuki, J. -y., Hirai, Y., & Tabata, O. (2018). Tensile Strength of Silicon Nanowires Batch-Fabricated into Electrostatic MEMS Testing Device. Applied Sciences, 8(6), 880. https://doi.org/10.3390/app8060880