A New Closed-Form Solution for Acoustic Emission Source Location in the Presence of Outliers

 ,
, 

Abstract
:1. Introduction
2. Ordinary Closed-Form Method
3. Theory of Proposed Method
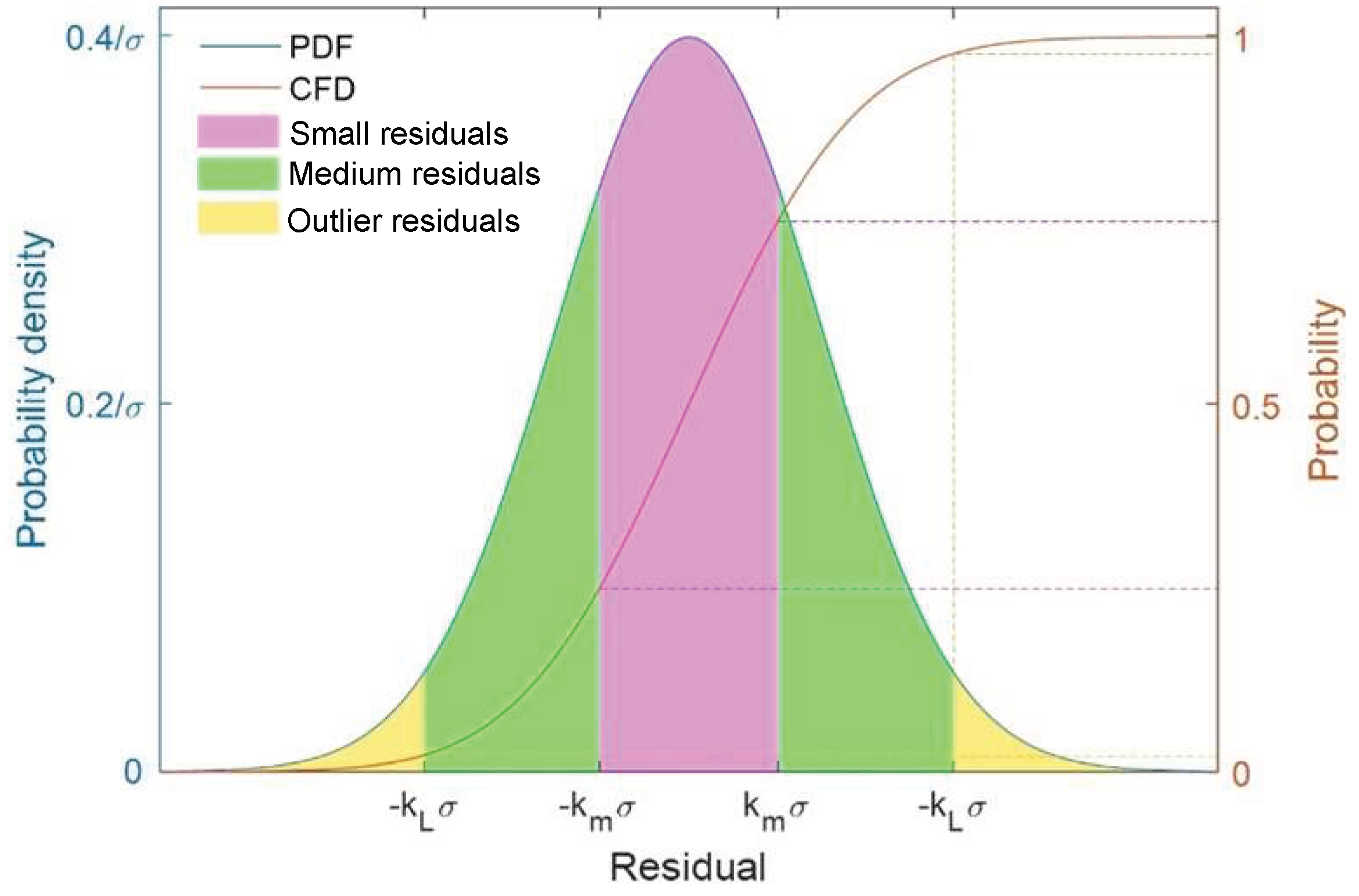
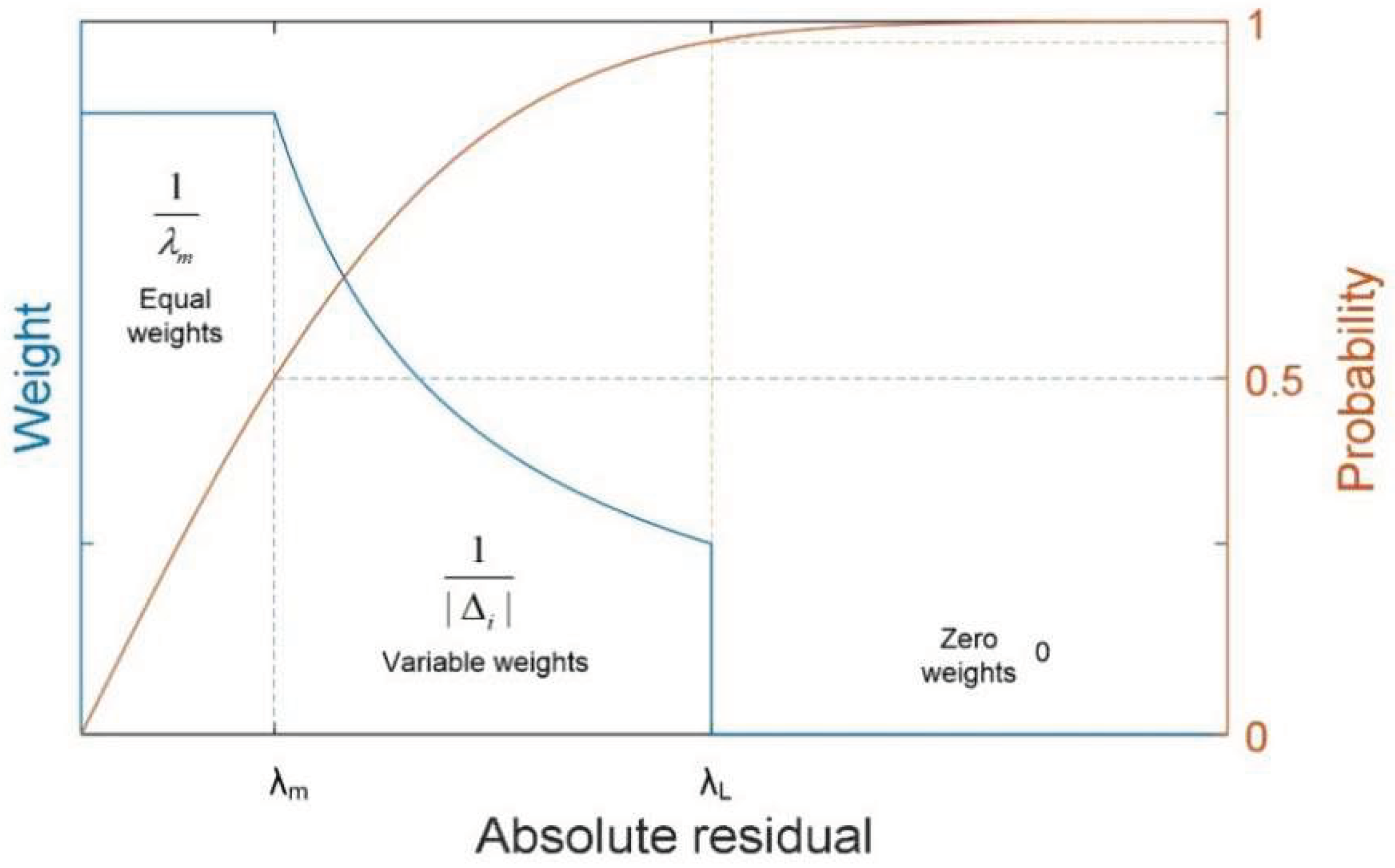
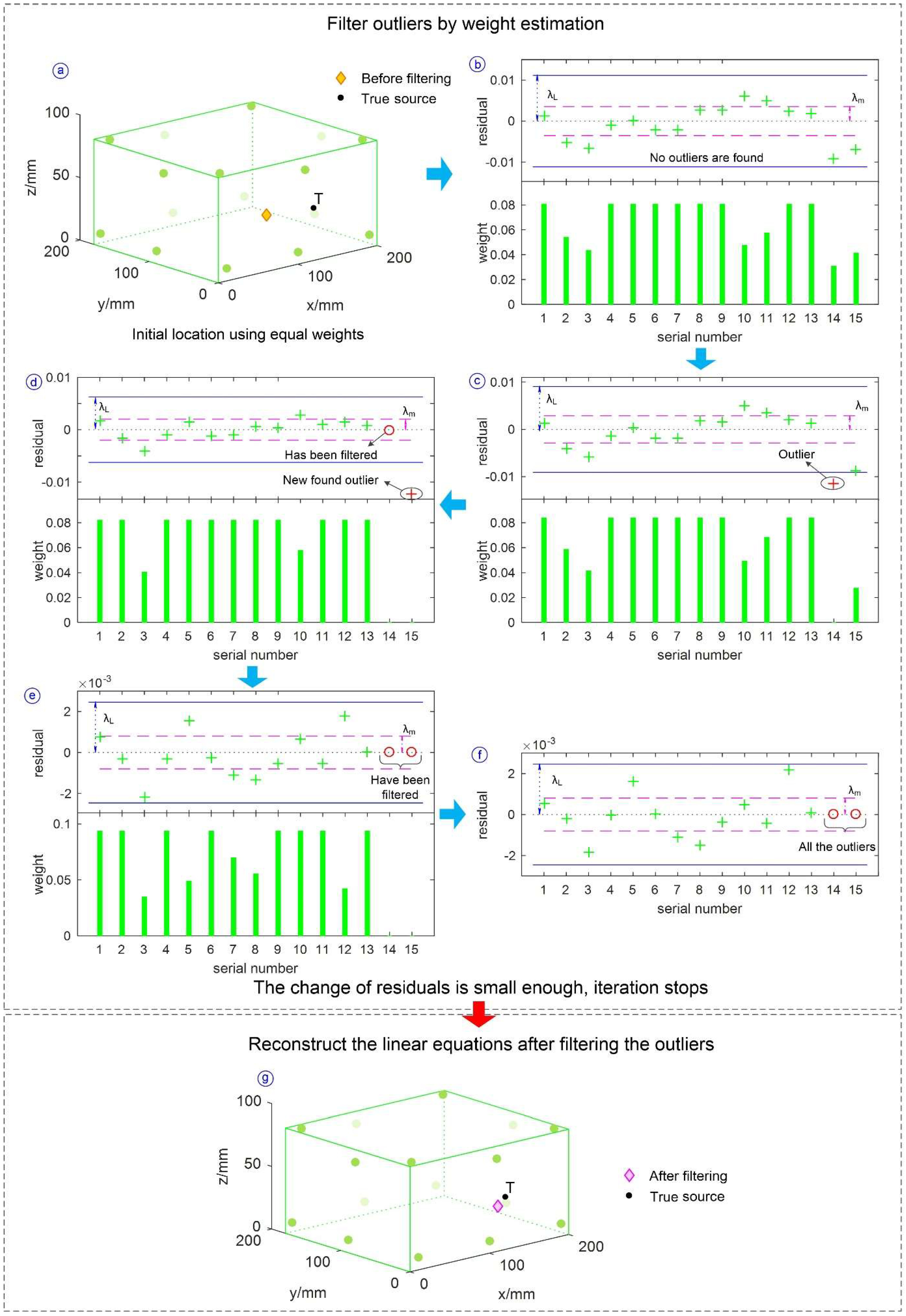
3.1. Filtering Outliers by Weight Estimation
3.1.1. Weight Estimation
3.1.2. Iteration between Weight Estimation and Source Location
3.2. Reconstruct Linear Equations
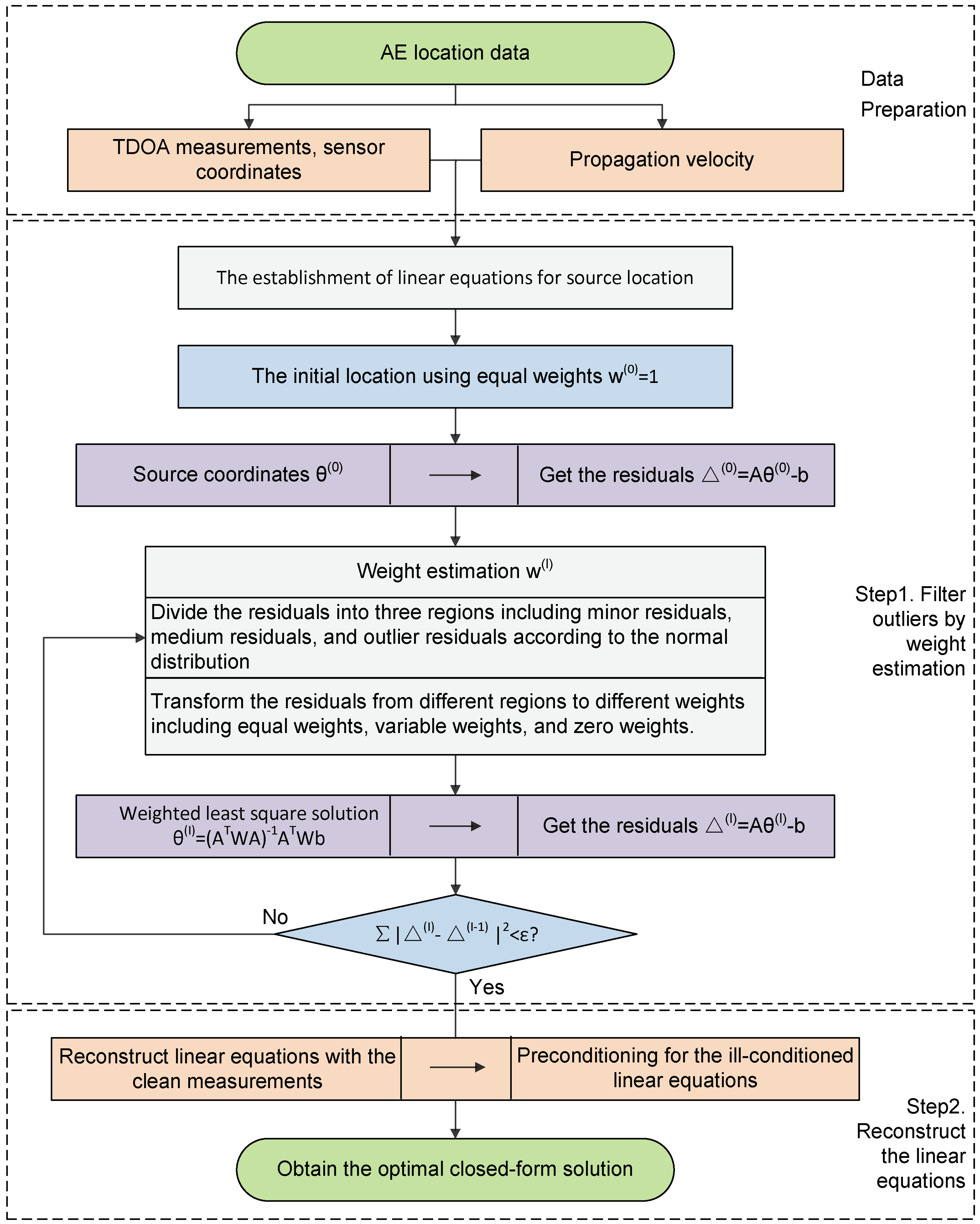
3.3. Location Process of Proposed Method
- Establish linear equations for the source location.
- Set index I = 0 and for the primary iteration and obtain the initial location result .
- Calculate the residuals , which are used to generate the preliminary weights according to Equation (7).
- Conduct the next iteration, I = 1, and solve the weighted least squares solution from Equation (14).
- Update the weights according to the residuals .
- Use the new weights in the next location, where I = 2 and is calculated.
- Repeat the above calculations (steps 4–6) to optimize the weights and filter the outliers, until .
- Reconstruct linear equations with the remaining measurements.
- Precondition linear equations to lower the condition number and eliminate the ill condition.
- Obtain the optimal closed-form solution by solving the preconditioned linear equations with Equation (18).
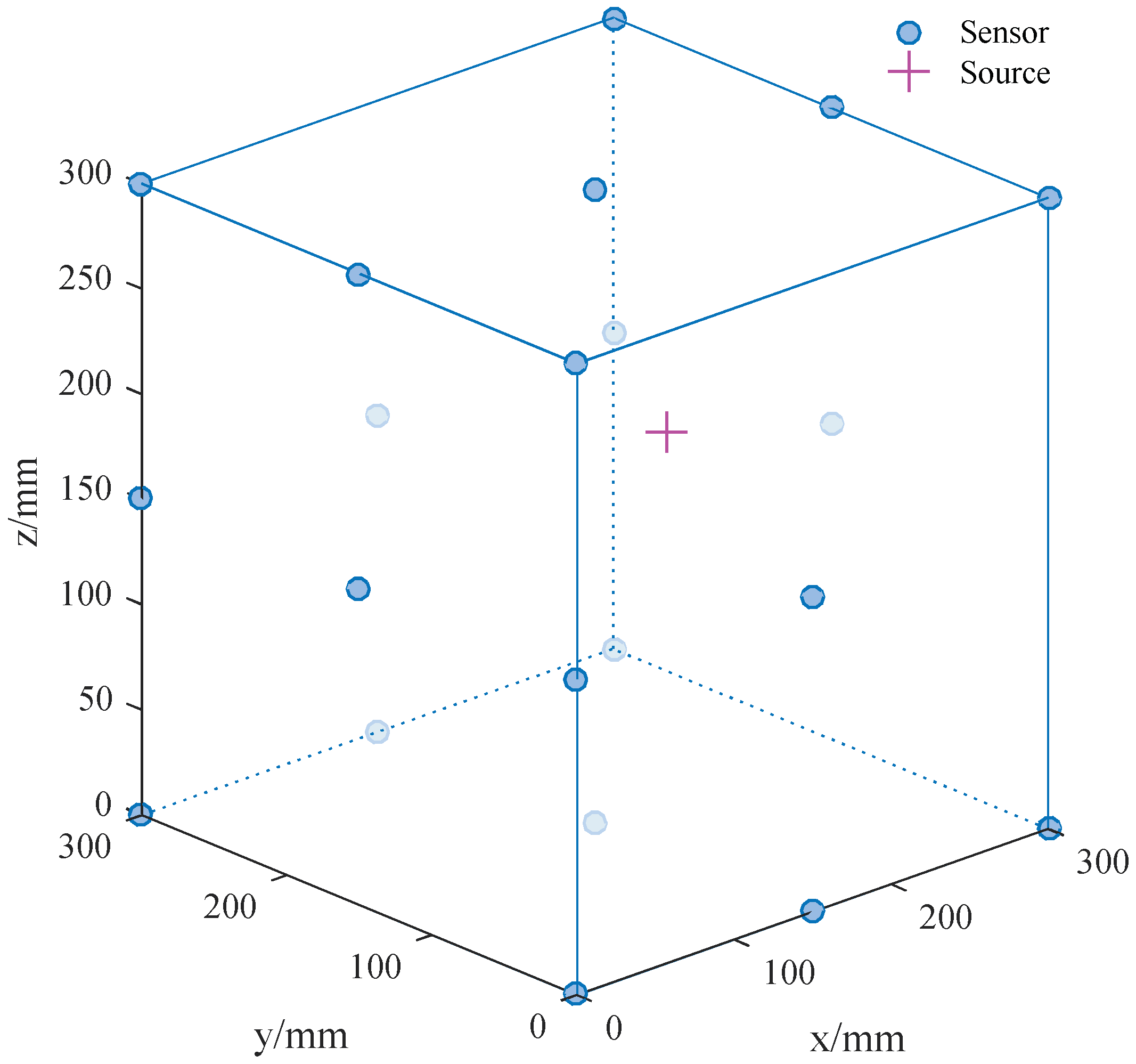
4. Experimental Verification
4.1. The Filtering of Outliers
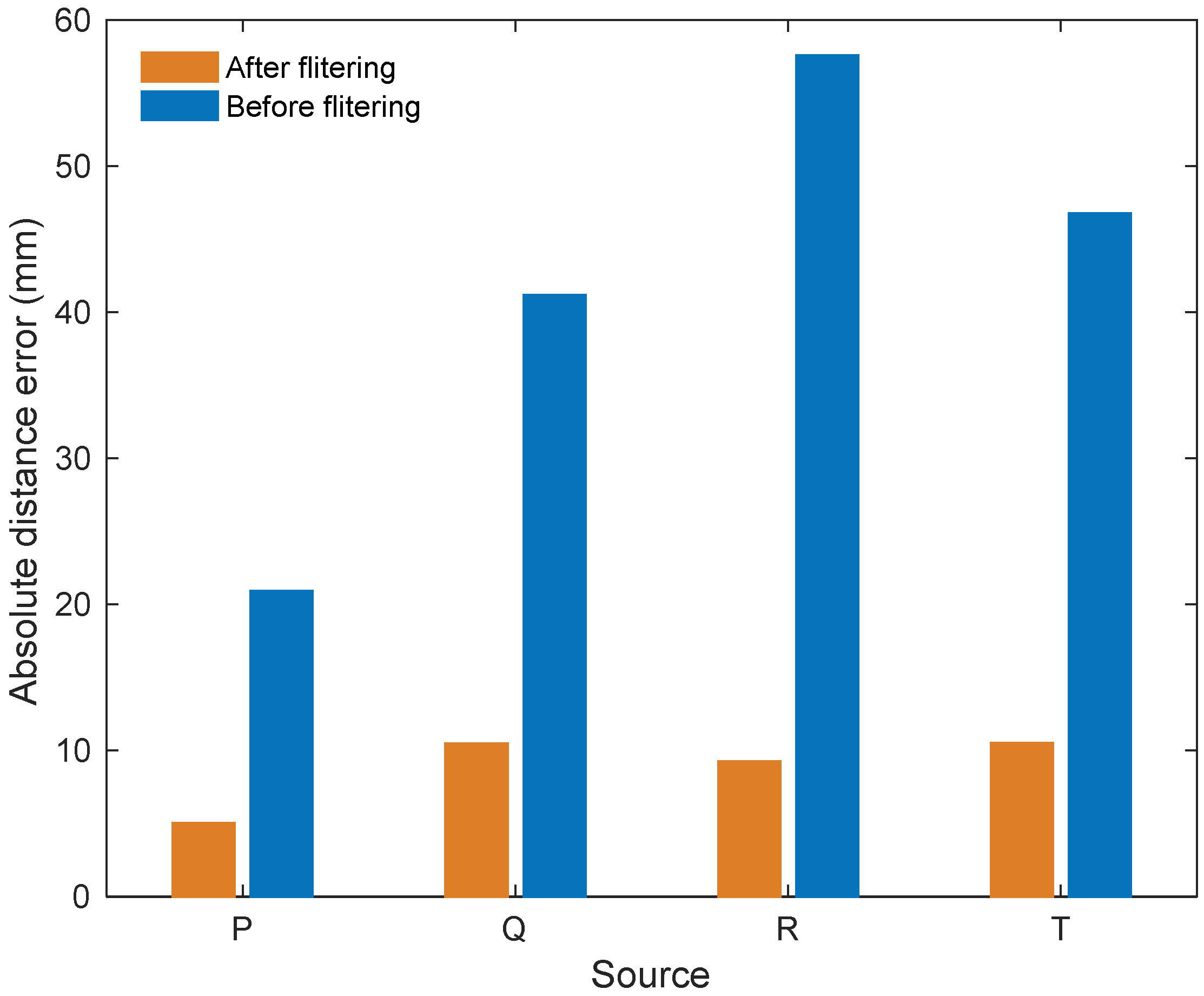
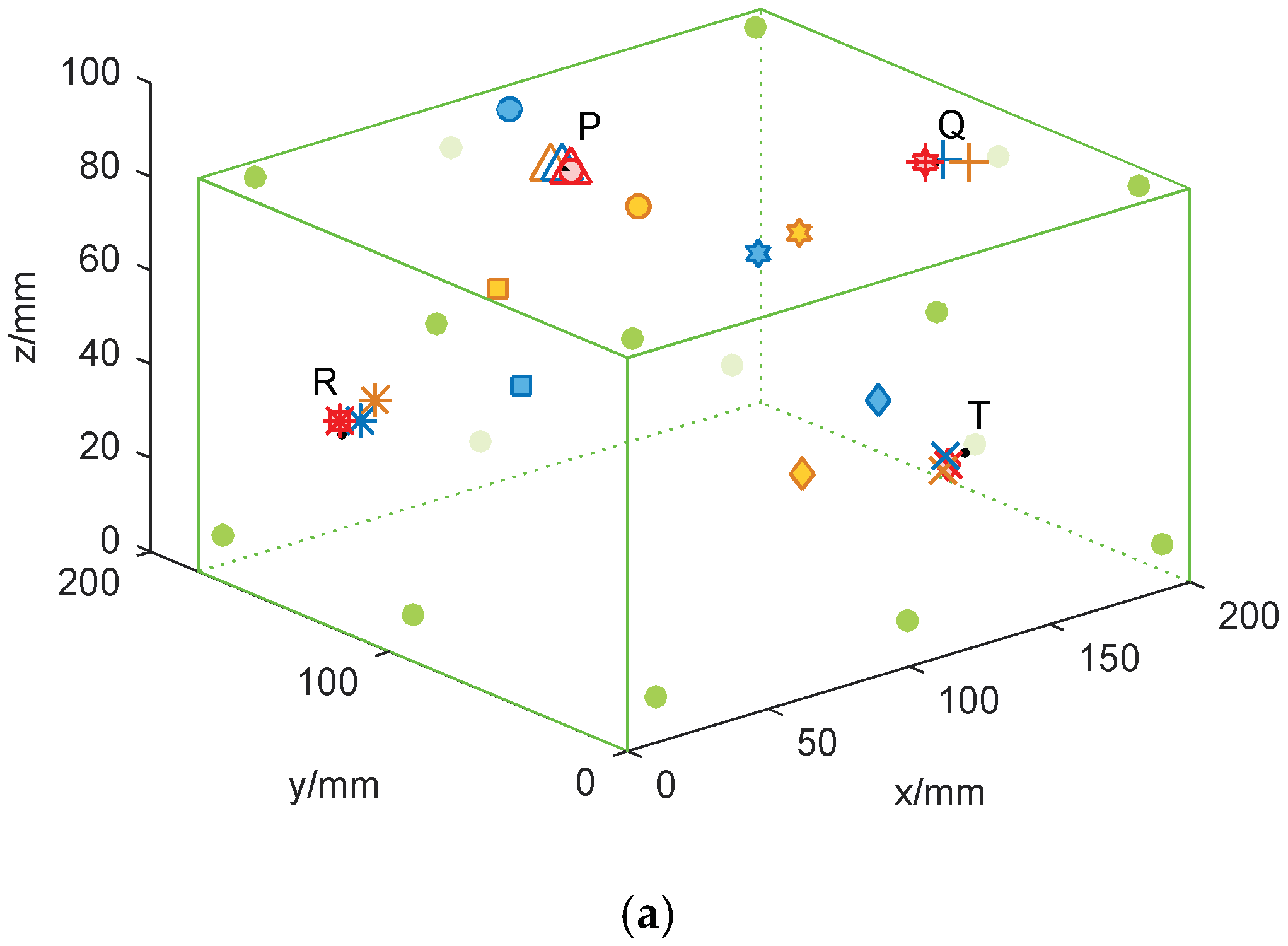
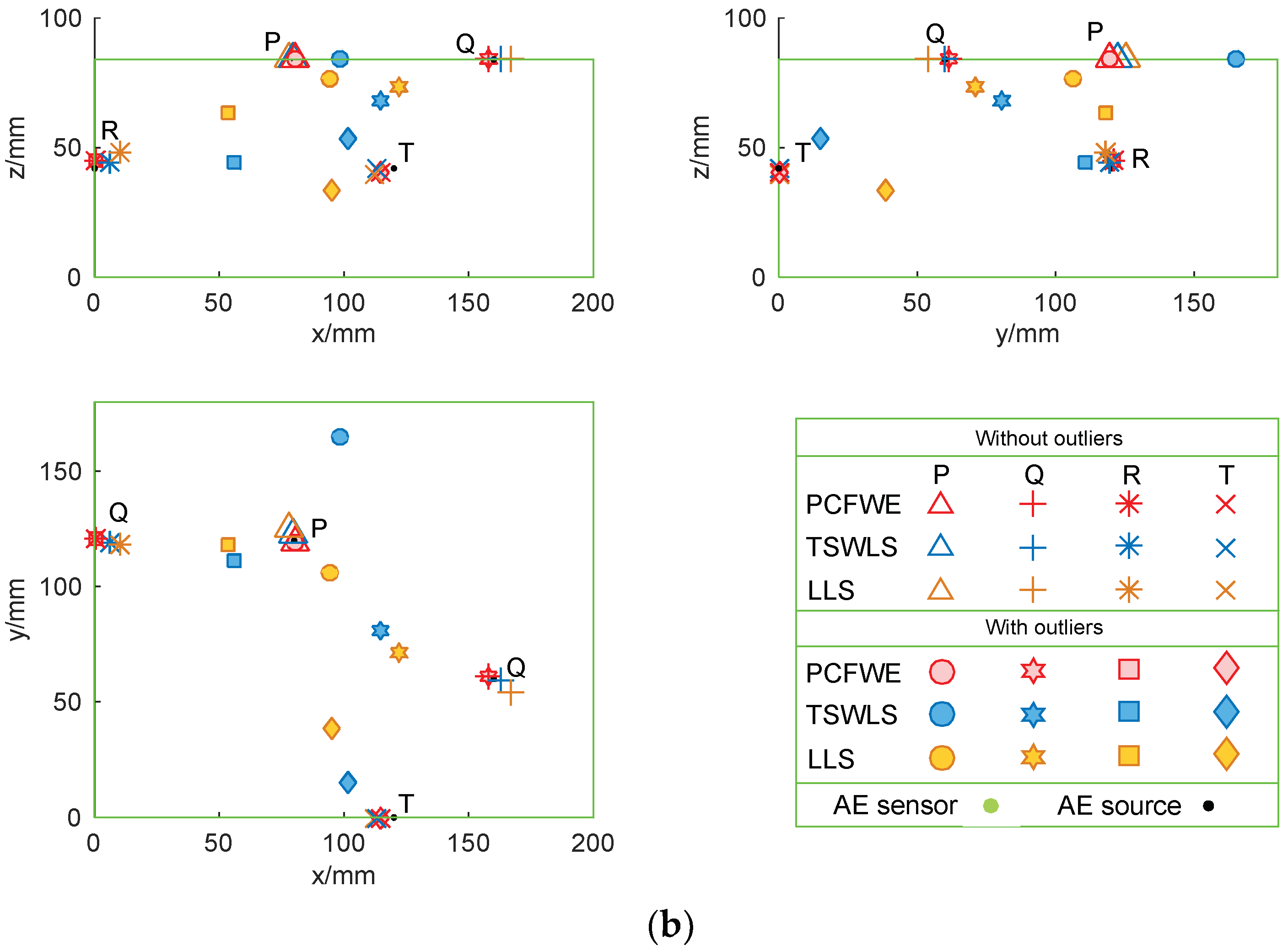
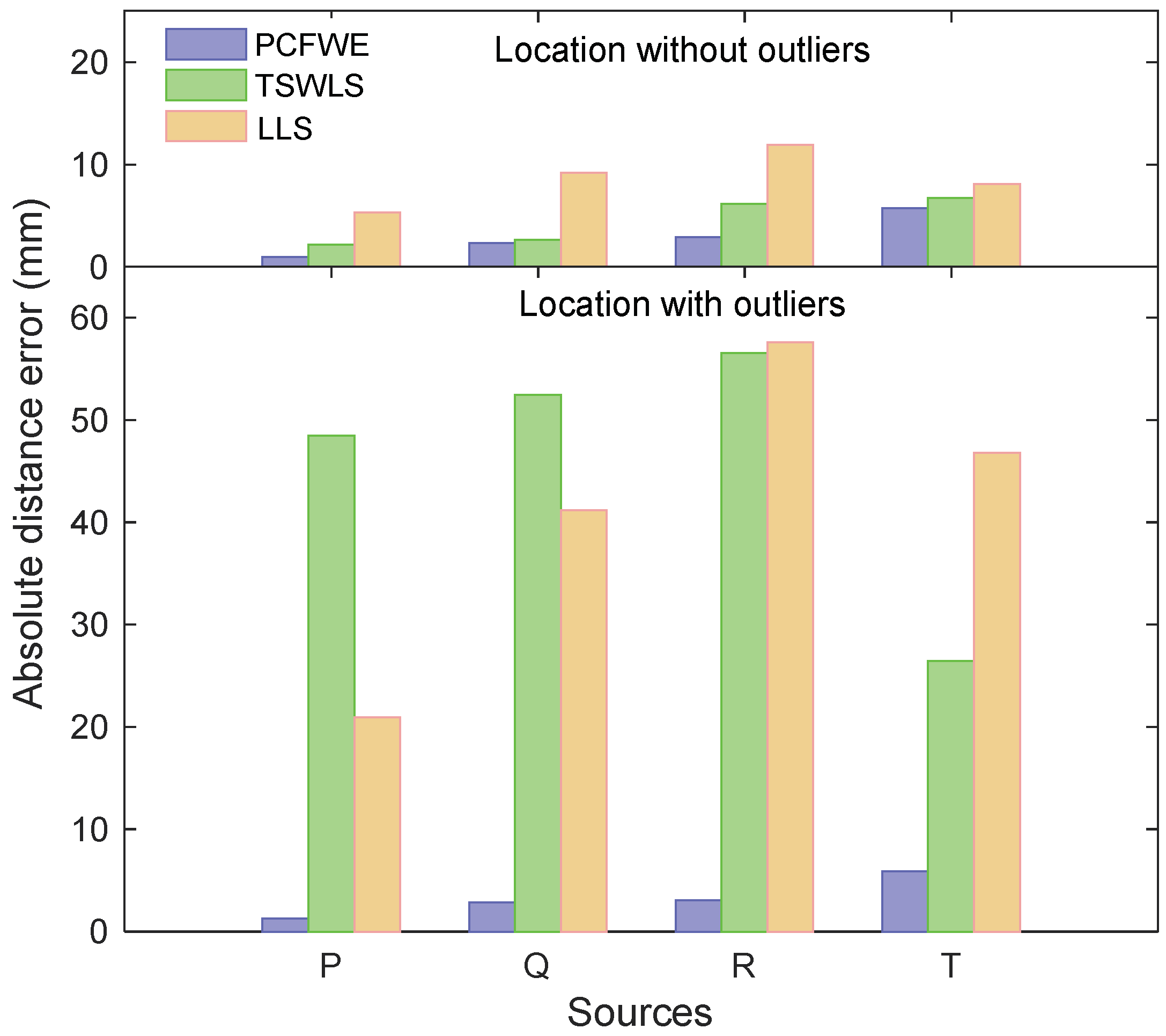
4.2. Comparing Location Results with and without Outliers
5. Conclusions and Discussion
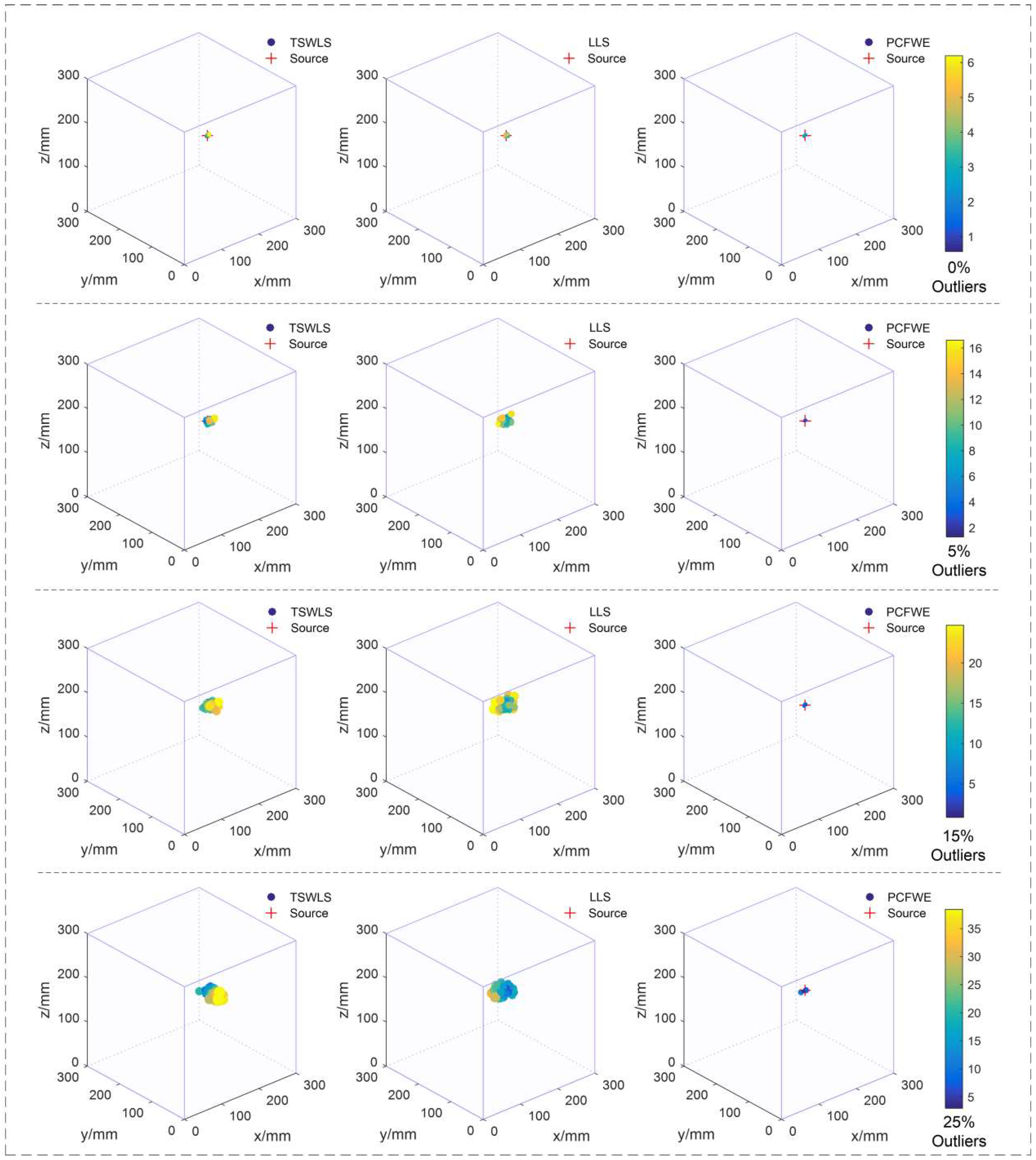
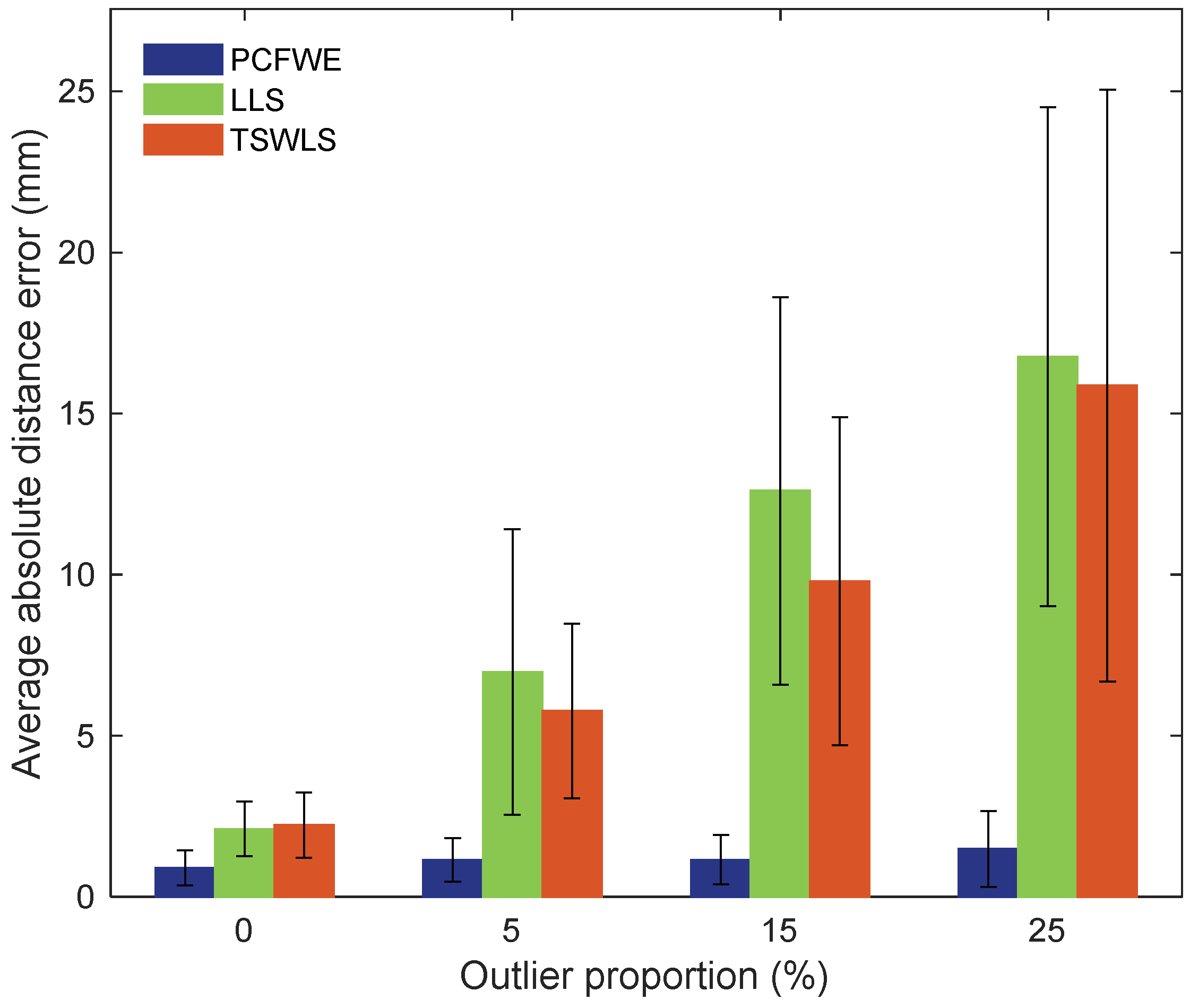
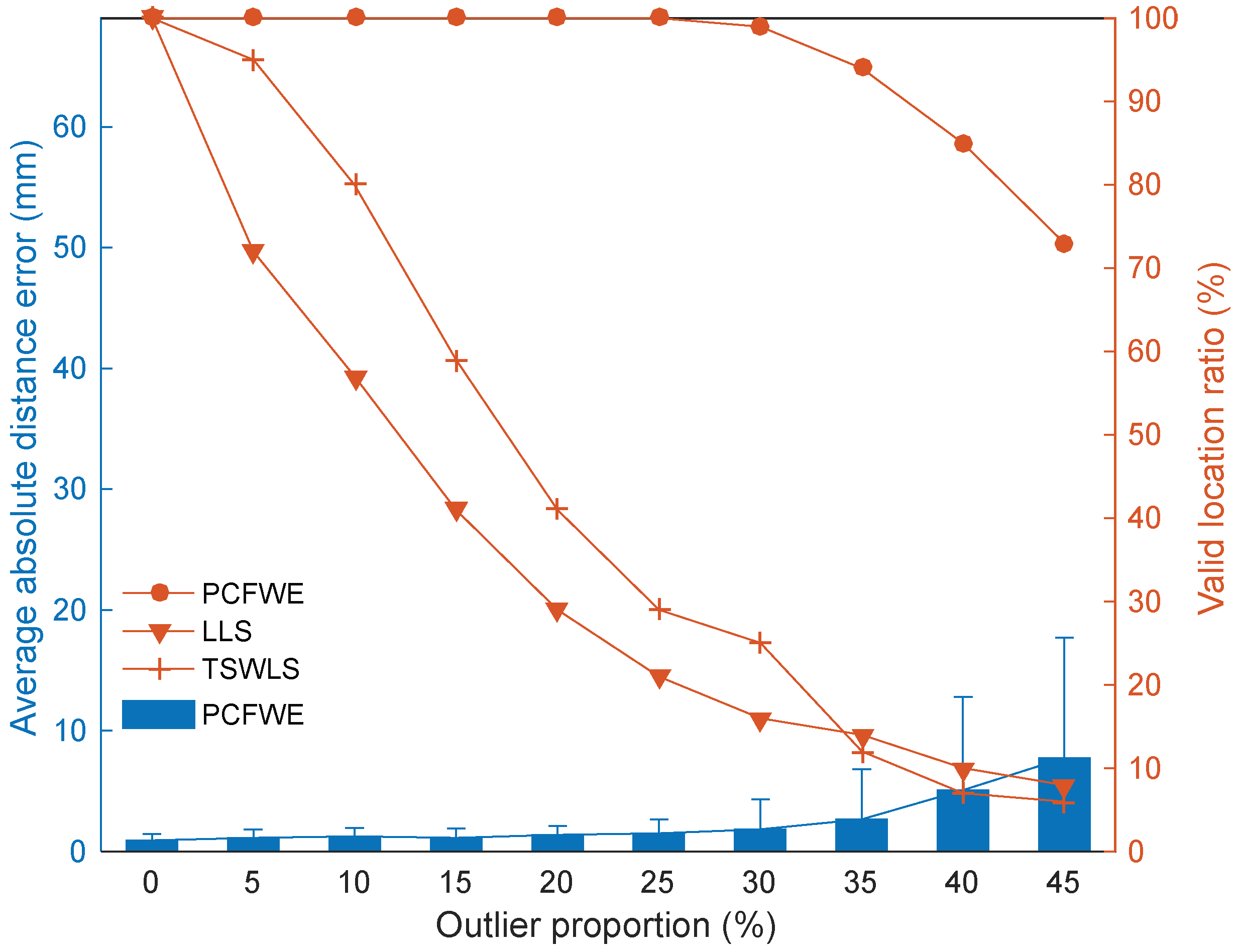
5.1. Outlier Tolerance
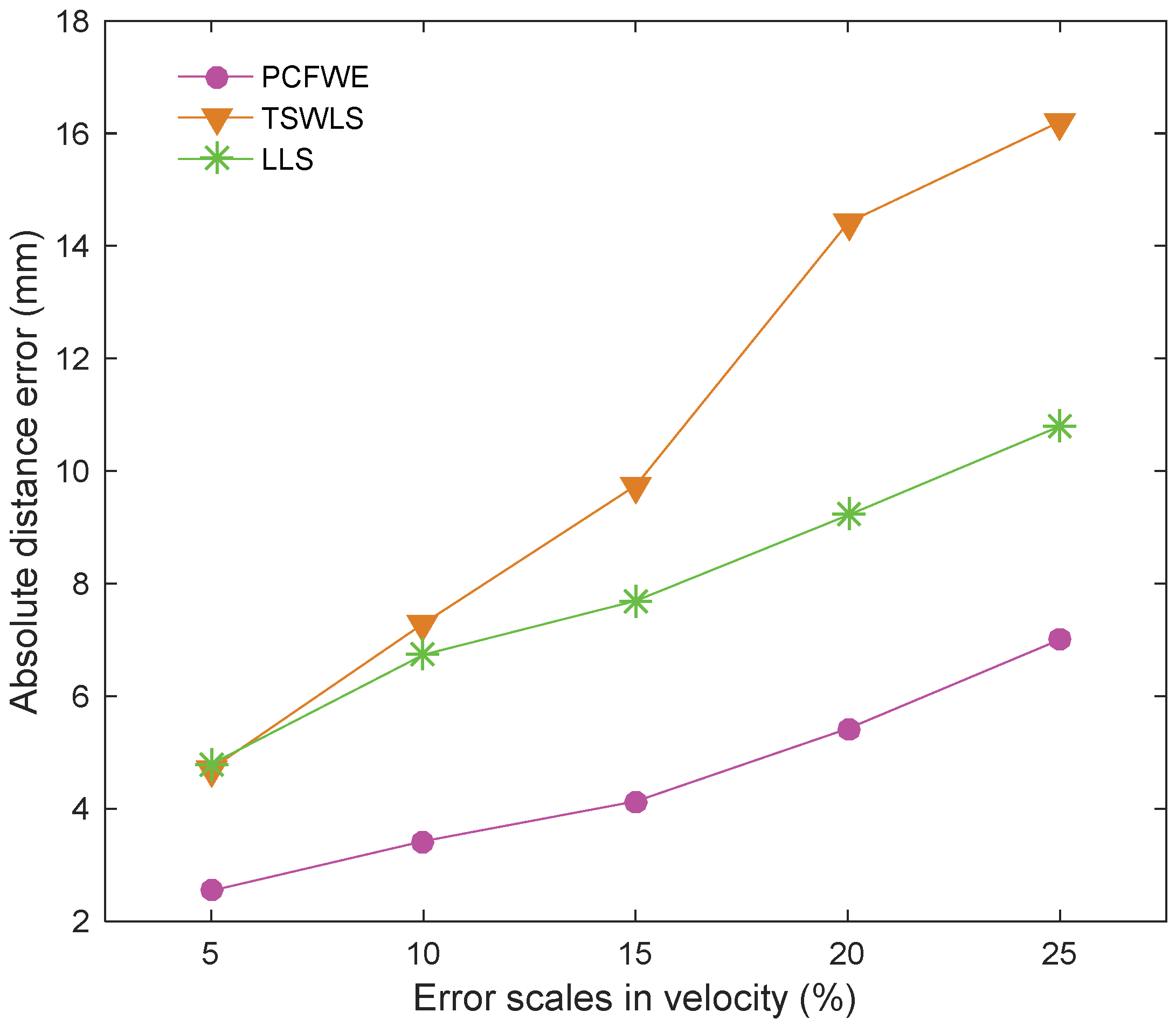
5.2. Velocity Sensibility
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| AE | Acoustic Emission |
| PCFWE | Preconditioned closed-form solution based on weight estimation |
| TDOA | Time difference of arrival |
| TSWLS | Two-step weighted least squares |
| LLS | Linear least squares |
References
- Dworakowski, Z.; Kohut, P.; Gallina, A.; Holak, K.; Uhl, T. Vision-based algorithms for damage detection and localization in structural health monitoring. Struct. Control Health 2016, 23, 35–50. [Google Scholar] [CrossRef]
- Topolář, L.; Pazdera, L.; Kucharczyková, B.; Smutný, J.; Mikulášek, K. Using acoustic emission methods to monitor cement composites during setting and hardening. Appl. Sci. 2017, 7, 451. [Google Scholar] [CrossRef]
- Muñoz, C.G.; Márquez, F.G. A new fault location approach for acoustic emission techniques in wind turbines. Energies 2016, 9, 40. [Google Scholar] [CrossRef]
- Martini, A.; Troncossi, M.; Rivola, A. Leak detection in water-filled small-diameter polyethylene pipes by means of acoustic emission measurements. Appl. Sci. 2016, 7, 2. [Google Scholar] [CrossRef]
- Zhou, Z.L.; Cai, X.; Ma, D.; Cao, W.Z.; Chen, L.; Zhou, J. Effects of water content on fracture and mechanical behavior of sandstone with a low clay mineral content. Eng. Fract. Mech. 2018, 193, 47–65. [Google Scholar] [CrossRef]
- Dong, L.J.; Sun, D.Y.; Li, X.B.; Du, K. Theoretical and Experimental Studies of Localization Methodology for AE and Microseismic Sources without Pre-Measured Wave Velocity in Mines. IEEE Access 2017, 5, 16818–16828. [Google Scholar] [CrossRef]
- Lacidogna, G.; Piana, G.; Carpinteri, A. Acoustic Emission and Modal Frequency Variation in Concrete Specimens under Four-Point Bending. Appl. Sci. 2017, 7, 339. [Google Scholar] [CrossRef]
- Li, X.; Deng, Z.D.; Rauchenstein, L.T.; Carlson, T.J. Contributed review: Source-localization algorithms and applications using time of arrival and time difference of arrival measurements. Rev. Sci. Instrum. 2016, 87, 921–960. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Benesty, J.; Elko, G.W.; Mersereati, R.M. Real-time passive source localization: A practical linear-correction least-squares approach. IEEE Trans. Speech Audio Process. 2001, 9, 943–956. [Google Scholar] [CrossRef]
- Roberts, R.G.; Christoffersson, A.; Cassidy, F. Real-time event detection, phase identification and source location estimation using single station three-component seismic data. Geophys. J. Int. 2010, 97, 471–480. [Google Scholar] [CrossRef]
- Al-Jumaili, S.K.; Pearson, M.R.; Holford, K.M.; Eaton, M.J.; Pullin, R. Acoustic emission source location in complex structures using full automatic delta t mapping technique. Mech. Syst. Signal Process. 2016, 72–73, 513–524. [Google Scholar] [CrossRef]
- Dong, L.J.; Shu, W.W.; Han, G.J.; Li, X.L.; Wang, J. A Multi-Step Source Localization Method With Narrowing Velocity Interval of Cyber-Physical Systems in Buildings. IEEE Access 2017, 5, 20207–20219. [Google Scholar] [CrossRef]
- Mostafapour, A.; Davoodi, S. Acoustic emission source locating in two-layer plate using wavelet packet decomposition and wavelet-based optimized residual complexity. Struct. Control. Health 2017. [Google Scholar] [CrossRef]
- Kundu, T. Acoustic source localization. Ultrasonics 2014, 54, 25–38. [Google Scholar] [CrossRef] [PubMed]
- Schau, H.; Robinson, A. Passive source location employing spherical surfaces from time-of-arrival differences. IEEE Trans. Aerosp. Electron. Syst. 1987, 35, 1223–1225. [Google Scholar]
- Smith, J.O.; Abel, J.S. Closed-form least-squares source location estimation from range-difference measurements. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1661–1669. [Google Scholar] [CrossRef]
- Zhou, Z.L.; Rui, Y.C.; Zhou, J.; Dong, L.J.; Cai, X. Locating an acoustic emission source in multilayered media based on the refraction path method. IEEE Access 2018. [Google Scholar] [CrossRef]
- Zhou, Z.L.; Zhou, J.; Dong, L.J.; Cai, X.; Rui, Y.C.; Ke, C.T. Experimental study on the location of an acoustic emission source considering refraction in different media. Sci. Rep. 2017, 7, 7472. [Google Scholar] [CrossRef] [PubMed]
- Drew, J.; White, R.S.; Tilmann, F.; Tarasewicz, J. Coalescence microseismic mapping. Geophys. J. Int. 2013, 195, 1773–1785. [Google Scholar] [CrossRef] [Green Version]
- Enosh, I.; Weiss, A.J. Outlier identification for toa-based source localization in the presence of noise. Signal Process. 2014, 102, 85–95. [Google Scholar] [CrossRef]
- Allen, R.V. Automatic earthquake recognition and timing from single traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar]
- Kuperkoch, L.; Meier, T.; Lee, J.; Friederich, W.; Grp, E.W. Automated determination of P-phase arrival times at regional and local distances using higher order statistics. Geophys. J. Int. 2010, 181, 1159–1170. [Google Scholar] [CrossRef]
- Niccolini, G.; Xu, J.; Manuello, A.; Lacidogna, G.; Carpinteri, A. Onset time determination of acoustic and electromagnetic emission during rock fracture. Prog. Electromagn. Res. Lett. 2012, 35, 51–62. [Google Scholar] [CrossRef]
- Akaike, H. A new look at the statistical model identification. Trans. Autom. Control 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Ge, M.C. Efficient mine microseismic monitoring. Int. J. Coal Geol. 2005, 64, 44–56. [Google Scholar] [CrossRef]
- Dong, L.J.; Li, X.B.; Ma, J.; Tang, L.Z. Three-dimensional analytical comprehensive solutions for acoustic emission/microseismic sources of unknown velocity system. Chin. J. Rock Mech. Eng. 2017, 36, 186–197. [Google Scholar]
- Taghizadeh, M.J.; Haghighatshoar, S.; Asaei, A.; Garner, P.N.; Bourlard, H. Robust microphone placement for source localization from noisy distance measurements. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, QLD, Australia, 19–24 April 2015; pp. 2579–2583. [Google Scholar]
- Picard, J.S.; Weiss, A.J. Time difference localization in the presence of outliers. Signal Process. 2012, 92, 2432–2443. [Google Scholar] [CrossRef]
- Li, P.; Ma, X. Robust acoustic source localization with TDOA based RANSAC algorithm. In Proceedings of the 5th International Conference on Intelligent Computing (ICIC), Ulsan, Korea, 16–19 September 2009; pp. 222–227. [Google Scholar]
- Weng, Y.; Xiao, W.D.; Xie, L.H. Total least squares method for robust source localization in sensor networks using tdoa measurements. Int. J. Distrib. Sens. Netw. 2011, 7, 172902. [Google Scholar] [CrossRef]
- Lin, L.; So, H.C.; Chan, F.K.W.; Chan, Y.T.; Ho, K.C. A new constrained weighted least squares algorithm for tdoa-based localization. Signal Process. 2013, 93, 2872–2878. [Google Scholar] [CrossRef]
- Mensing, C.; Plass, S. Positioning algorithms for cellular networks using TDOA. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toulouse, France, 14–19 May 2006; pp. 513–516. [Google Scholar]
- Chan, Y.T.; Hang, H.Y.C.; Ching, P.C. Exact and approximate maximum likelihood localization algorithms. IEEE Trans. Veh. Technol. 2006, 55, 10–16. [Google Scholar] [CrossRef]
- Chen, J.C.; Hudson, R.E.; Yao, K. Maximum-likelihood source localization and unknown sensor location estimation for wideband signals in the near-field. IEEE Trans. Signal Proces. 2002, 50, 1843–1854. [Google Scholar] [CrossRef]
- Jiang, Y.; Azimi-Sadjadi, M.R. A Robust Source Localization Algorithm Applied to Acoustic Sensor Network. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Honolulu, HI, USA, 15–20 April 2007; pp. 1233–1236. [Google Scholar]
- Li, X.B.; Wang, Z.W.; Dong, L.J. Locating single-point sources from arrival times containing large picking errors (lpes): The virtual field optimization method (vfom). Sci. Rep. 2016, 6, 19205. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Wang, E.Y.; Sun, Z.Y.; Li, B.L. Simplex microseismic source location method based on l1 norm statistical standard. J. China Coal Soc. 2014, 39, 2431–2438. [Google Scholar]
- Prugger, A.F.; Gendzwill, D.J. Microearthquake location: A nonlinear approach that makes use of a simplex stepping procedure. Bull. Seismol. Soc. Am. 1988, 78, 799–815. [Google Scholar]
- Ciampa, F.; Meo, M. Acoustic emission source localization and velocity determination of the fundamental mode A0 using wavelet analysis and a Newton-based optimization technique. Smart Mater. Struct. 2010, 19, 045027. [Google Scholar] [CrossRef]
- Foy, W.H. Position-location solutions by taylor-series estimation. IEEE Trans. Aerosp. Electron. Syst. 2007, AES-12, 187–194. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Ho, K.C.; Xu, W. An accurate algebraic solution for moving source location using TDOA and FDOA measurements. IEEE Trans. Signal Process. 2004, 52, 2453–2463. [Google Scholar] [CrossRef]
- Ho, K.C. Bias reduction for an explicit solution of source localization using TDOA. IEEE Trans. Signal Process. 2012, 60, 2101–2114. [Google Scholar] [CrossRef]
- Ho, K.C.; Lu, X.; Kovavisaruch, L.O. Source localization using TDOA and FDOA measurements in the presence of receiver location errors: Analysis and solution. IEEE Trans. Signal Process. 2007, 55, 684–696. [Google Scholar] [CrossRef]
- Xu, B.; Qi, W.D.; Wei, L.; Liu, P. Turbo-TSWLS: Enhanced two-step weighted least squares estimator for TDOA-based localisation. Electron. Lett. 2012, 48, 1597–1598. [Google Scholar] [CrossRef]
- Dong, L.J.; Shu, W.W.; Li, X.B.; Han, G.J.; Zou, W. Three dimensional comprehensive analytical solutions for locating sources of sensor networks in unknown velocity mining system. IEEE Access 2017, 5, 11337–11351. [Google Scholar] [CrossRef]
- Dong, L.J.; Zou, W.; Li, X.B.; Shu, W.W.; Wang, Z.W. Collaborative localization method using analytical and iterative solutions for microseismic/acoustic emission sources in the rockmass structure for underground mining. Eng. Fract. Mech. 2018. [Google Scholar] [CrossRef]
- Leighton, F.; Duvall, W.I. Least Squares Method for Improving Rock Noise Source Location Techniques; USBM RI 7626; Bureau of Mines: Washington, DC, USA, 1972; pp. 26–69.
- Fang, W.H.; Liu, L.C.; Yang, J.P.; Shui, A.S. A non-iterative ae source localization algorithm with unknown velocity. J. Log. Eng. Univ. 2016, 32, 1–7. [Google Scholar]
- Li, X.B.; Dong, L.J. An efficient closed-form solution for acoustic emission source location in three-dimensional structures. AIP Adv. 2014, 4, 152–160. [Google Scholar] [CrossRef]
- Dong, L.J.; Li, X.B.; Xie, G.N. An analytical solution for acoustic emission source location for known P wave velocity system. Math. Probl. Eng. 2014, 2014, 290686. [Google Scholar] [CrossRef]
- Strutz, T. Data Fitting and Uncertainty: A Practical Introduction to Weighted Least Squares and Beyond; Vieweg and Teubner Verlag: Wiesbaden, Germany, 2010. [Google Scholar]
- Chauvenet, W. A Manual of Spherical and Practical Astronomy, 4th ed.; J.B. Lippincott Co.: Philadelphia, PA, USA, 1871; pp. 558–568. [Google Scholar]
- Holland, P.W.; Welsch, R.E. Robust regression using iteratively reweighted least-squares. Commun. Stat. Theory Mothods 1977, 6, 813–827. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sources | True Source Coordinates | Location Results | Absolute Distance Error (mm) | |||||
|---|---|---|---|---|---|---|---|---|
| x (mm) | y (mm) | z (mm) | x (mm) | y (mm) | z (mm) | |||
| Without filtering | P | 80.00 | 120.00 | 84.00 | 93.94 | 106.20 | 76.60 | 20.96 |
| Q | 160.00 | 60.00 | 84.00 | 121.71 | 71.02 | 73.45 | 41.21 | |
| R | 0.00 | 120.00 | 42.00 | 53.29 | 117.88 | 63.78 | 57.61 | |
| T | 120.00 | 0.00 | 42.00 | 95.25 | 38.87 | 33.73 | 46.82 | |
| filtering | P | 80.00 | 120.00 | 84.00 | 78.14 | 124.71 | 84.00 | 5.07 |
| Q | 160.00 | 60.00 | 84.00 | 168.66 | 54.04 | 84.00 | 10.51 | |
| R | 0.00 | 120.00 | 42.00 | 7.82 | 119.33 | 46.96 | 9.28 | |
| T | 120.00 | 0.00 | 42.00 | 111.22 | 0.00 | 36.15 | 10.55 | |
| AE Source | Outliers | PCFWE | TSWLS | LLS | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| x (mm) | y (mm) | z (mm) | Absolute Distance Error (mm) | x (mm) | y (mm) | z (mm) | Absolute Distance Error (mm) | x (mm) | y (mm) | z (mm) | Absolute Distance Error (mm) | ||
| P | No | 80.46 | 119.12 | 84.00 | 0.99 | 79.96 | 122.18 | 84.00 | 2.18 | 77.98 | 124.97 | 84.00 | 5.37 |
| Yes | 80.60 | 118.86 | 84.00 | 1.29 | 98.24 | 164.94 | 84.00 | 48.50 | 93.94 | 106.20 | 76.60 | 20.96 | |
| Q | No | 158.08 | 61.40 | 84.00 | 2.38 | 162.65 | 59.57 | 84.00 | 2.69 | 167.06 | 54.11 | 84.00 | 9.20 |
| Yes | 157.80 | 61.88 | 84.00 | 2.89 | 114.45 | 80.80 | 68.23 | 52.50 | 121.71 | 71.02 | 73.45 | 41.21 | |
| R | No | 0.00 | 121.08 | 44.75 | 2.96 | 5.78 | 119.36 | 44.05 | 6.17 | 10.11 | 117.79 | 47.93 | 11.93 |
| Yes | 0.00 | 121.24 | 44.81 | 3.07 | 55.81 | 110.82 | 44.08 | 56.60 | 53.29 | 117.88 | 63.78 | 57.61 | |
| T | No | 114.43 | 0.00 | 40.53 | 5.76 | 113.24 | 0.00 | 42.30 | 6.76 | 112.17 | 0.00 | 39.88 | 8.12 |
| Yes | 114.28 | 0.00 | 40.55 | 5.90 | 101.38 | 14.82 | 53.56 | 26.46 | 95.25 | 38.87 | 33.73 | 46.82 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Rui, Y.; Zhou, J.; Dong, L.; Chen, L.; Cai, X.; Cheng, R. A New Closed-Form Solution for Acoustic Emission Source Location in the Presence of Outliers. Appl. Sci. 2018, 8, 949. https://doi.org/10.3390/app8060949
Zhou Z, Rui Y, Zhou J, Dong L, Chen L, Cai X, Cheng R. A New Closed-Form Solution for Acoustic Emission Source Location in the Presence of Outliers. Applied Sciences. 2018; 8(6):949. https://doi.org/10.3390/app8060949
Chicago/Turabian StyleZhou, Zilong, Yichao Rui, Jing Zhou, Longjun Dong, Lianjun Chen, Xin Cai, and Ruishan Cheng. 2018. "A New Closed-Form Solution for Acoustic Emission Source Location in the Presence of Outliers" Applied Sciences 8, no. 6: 949. https://doi.org/10.3390/app8060949
APA StyleZhou, Z., Rui, Y., Zhou, J., Dong, L., Chen, L., Cai, X., & Cheng, R. (2018). A New Closed-Form Solution for Acoustic Emission Source Location in the Presence of Outliers. Applied Sciences, 8(6), 949. https://doi.org/10.3390/app8060949