Modeling and Control of Negative-Buoyancy Tri-Tilt-Rotor Autonomous Underwater Vehicles Based on Immersion and Invariance Methodology

Abstract
:1. Introduction
2. Preliminaries
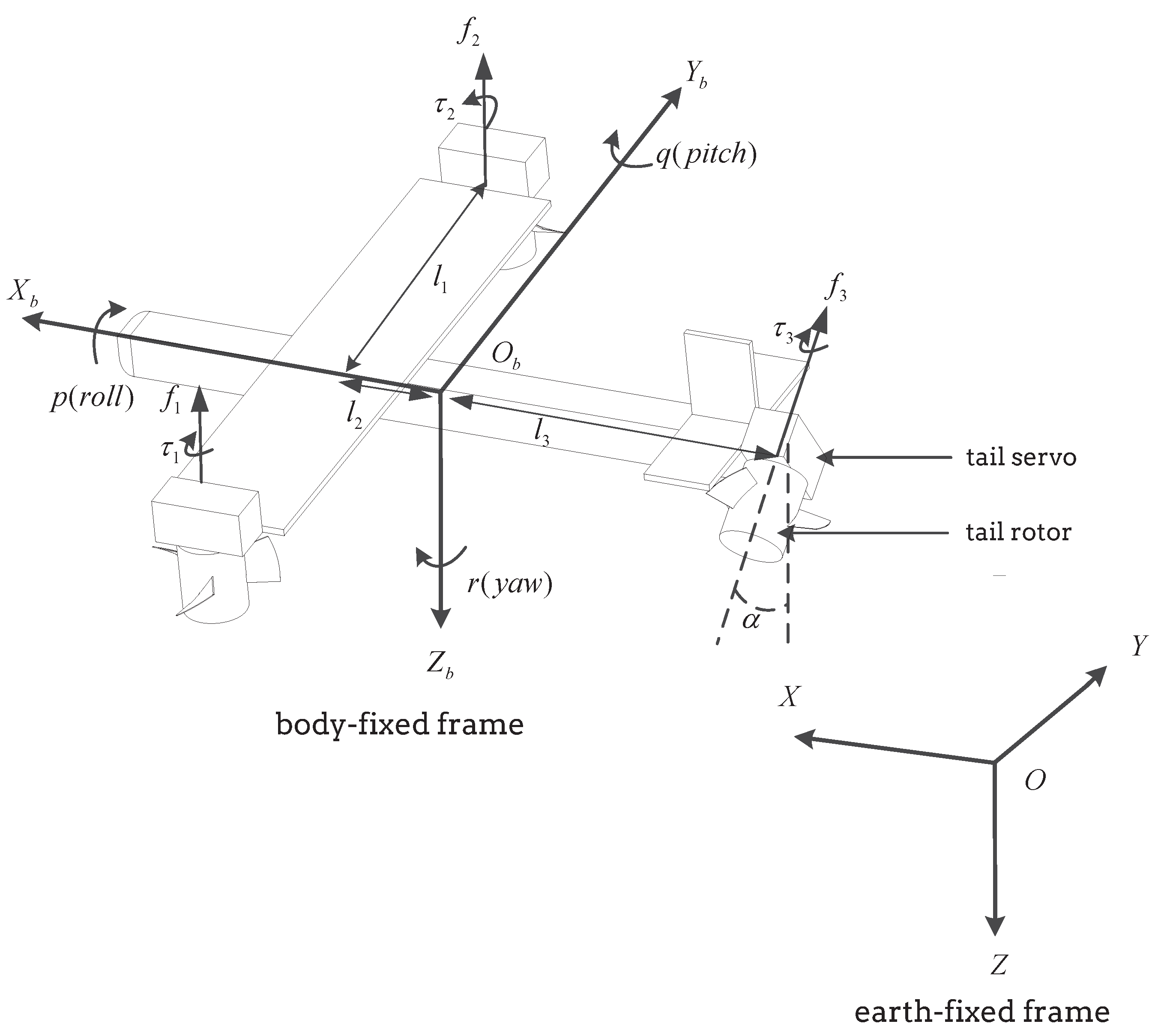
2.1. Kinematics and Kinetics
2.2. Altitude and Attitude Subsystems
3. Attitude Controller Design
3.1. Attitude Error Model
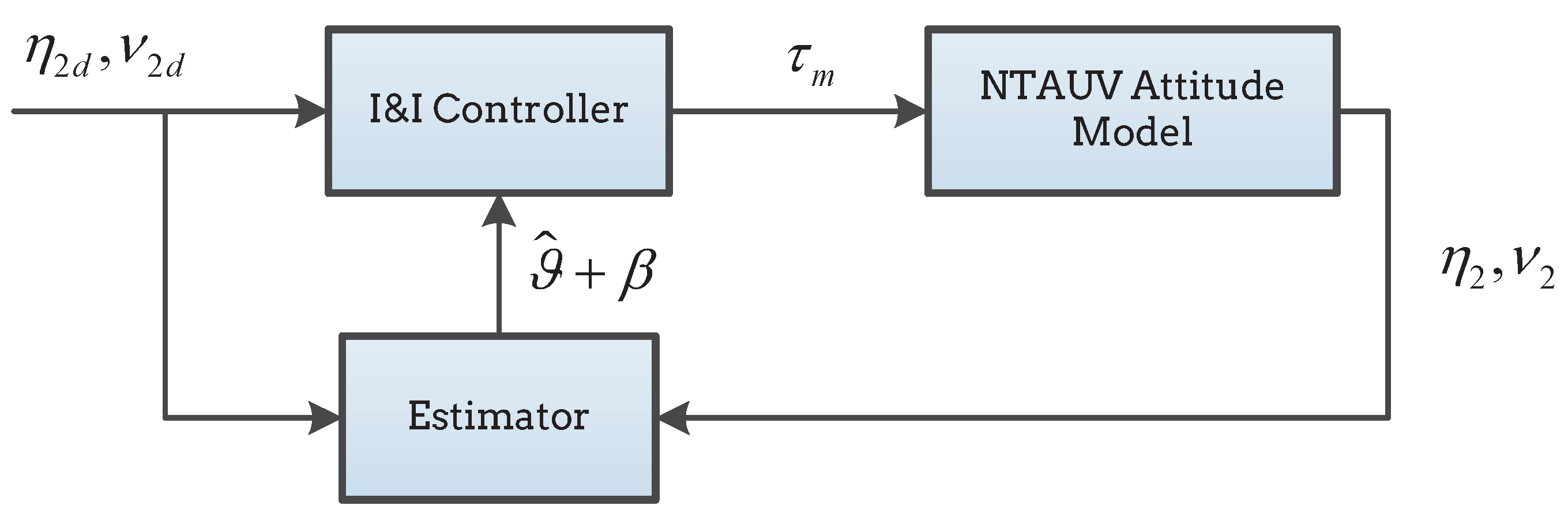
3.2. Controller and Estimator Design
3.3. Stability Analysis
4. Experiment Results
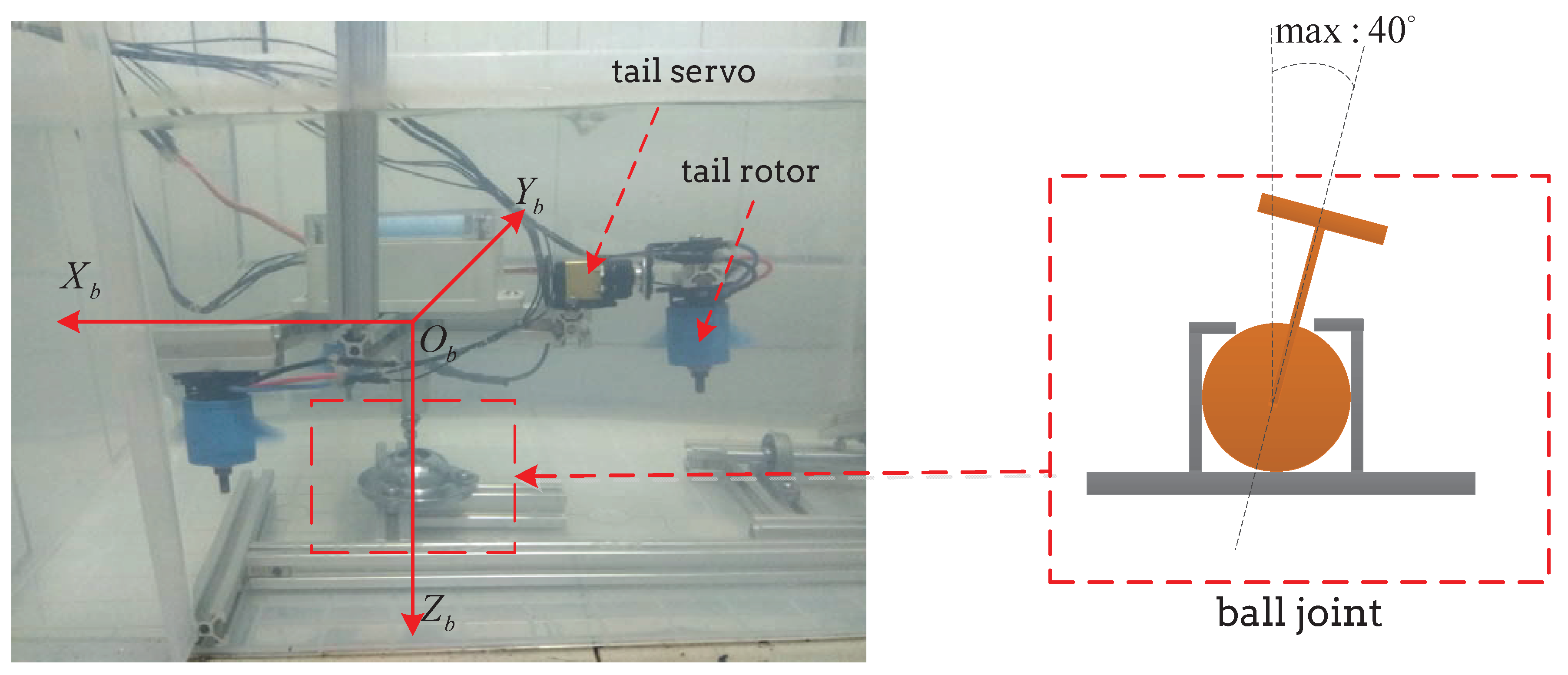
4.1. Testbed
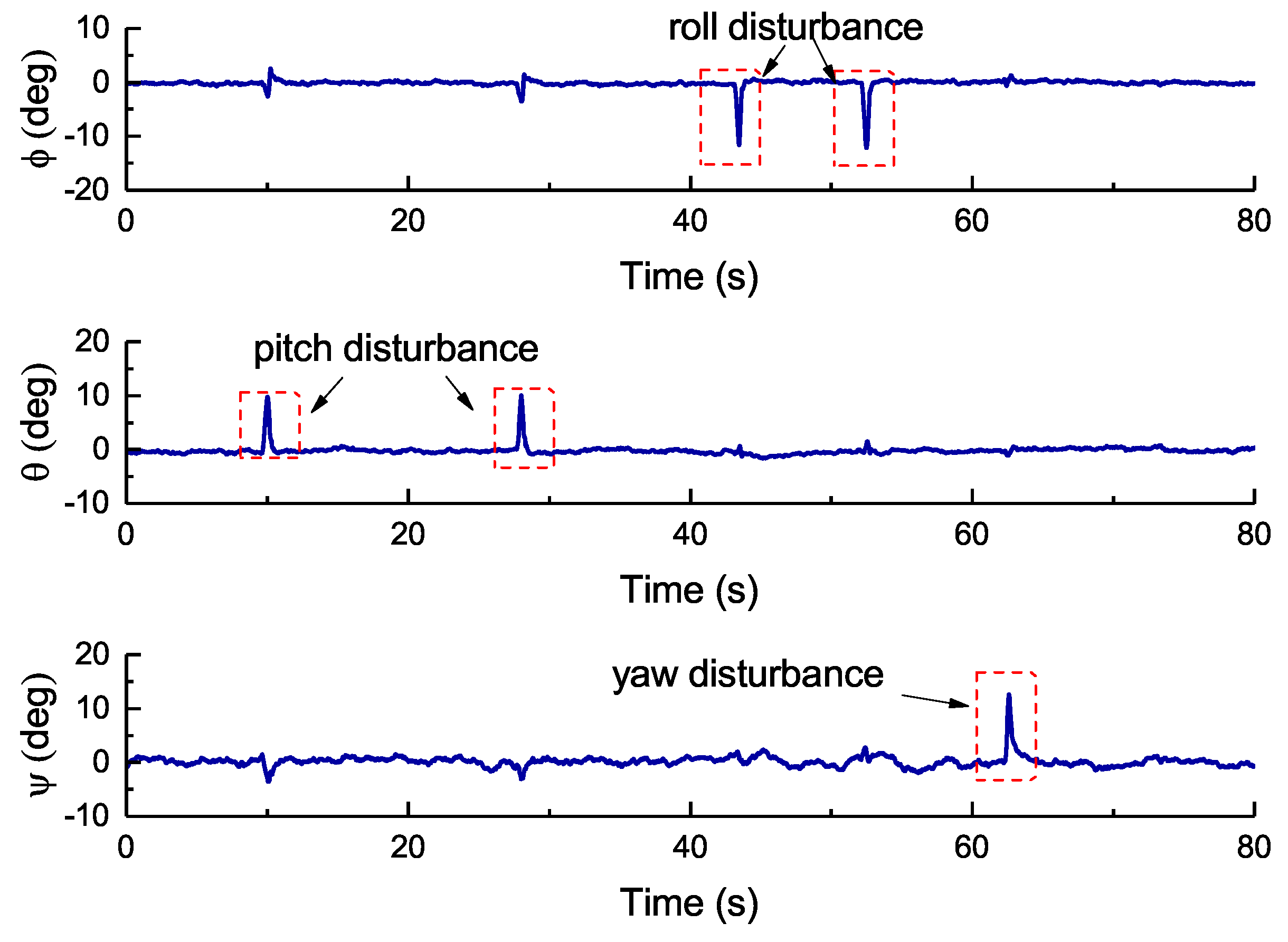
4.2. Experiment Results and Discussion
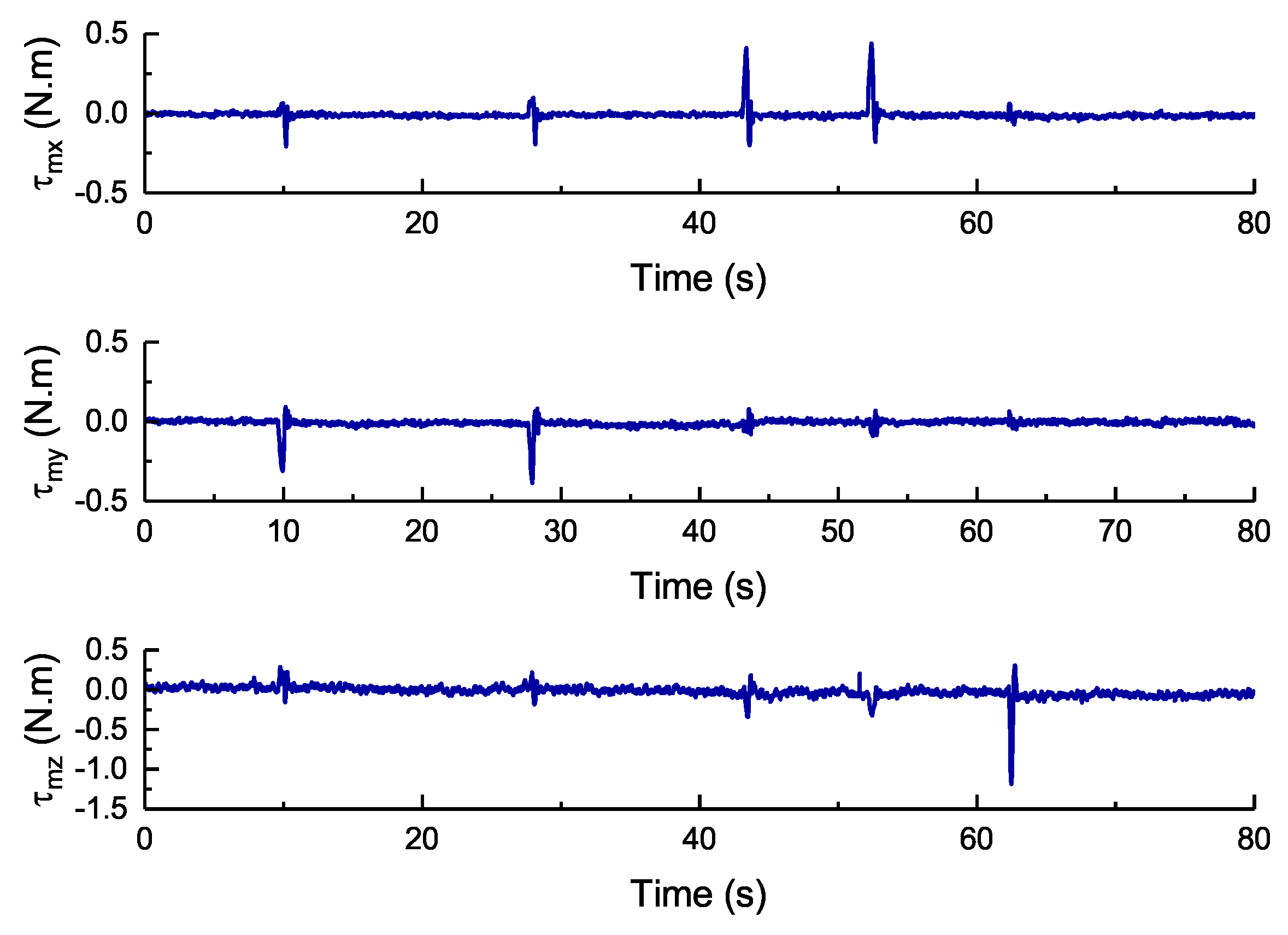
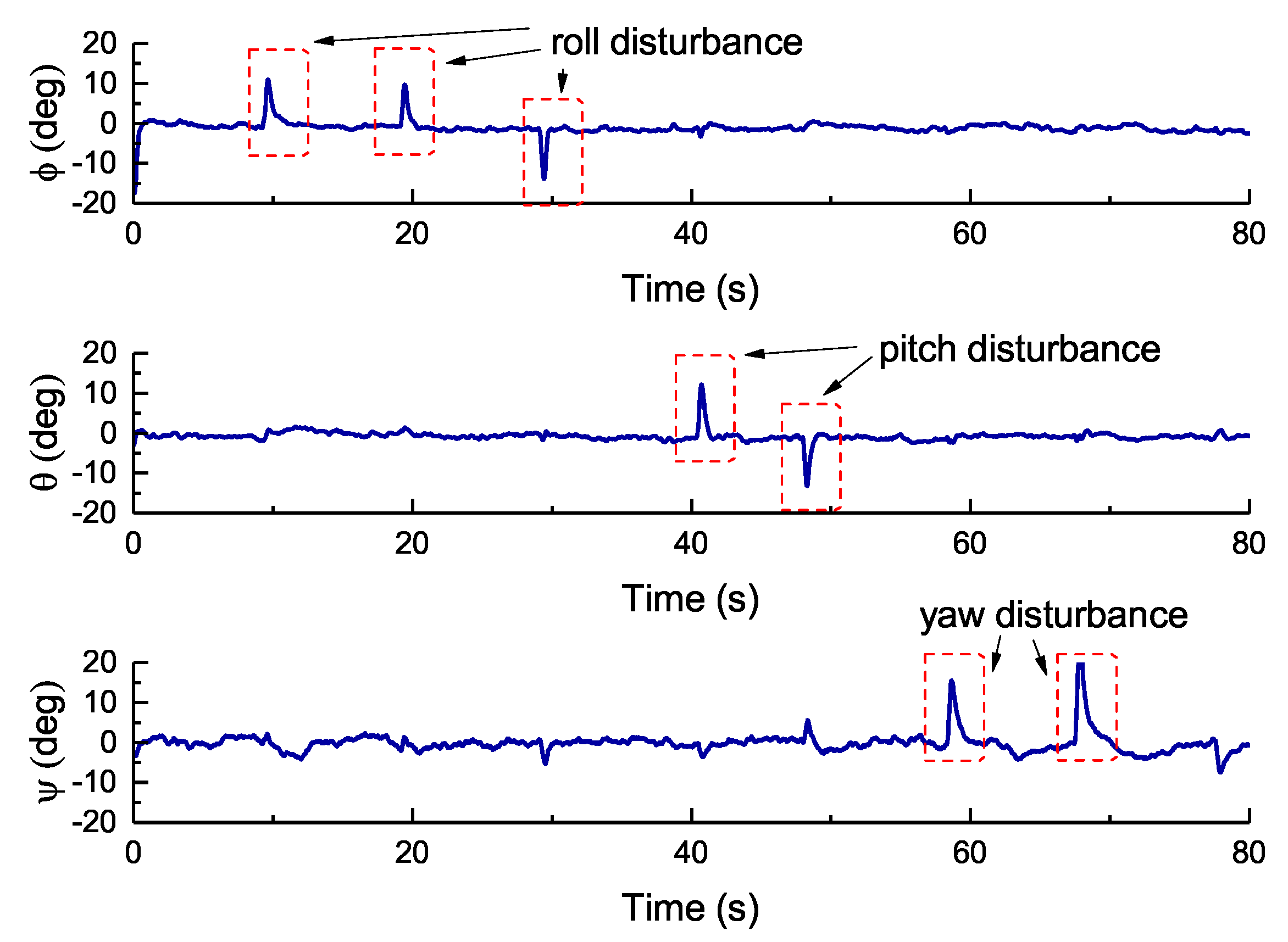
4.2.1. I&I Control Experiment
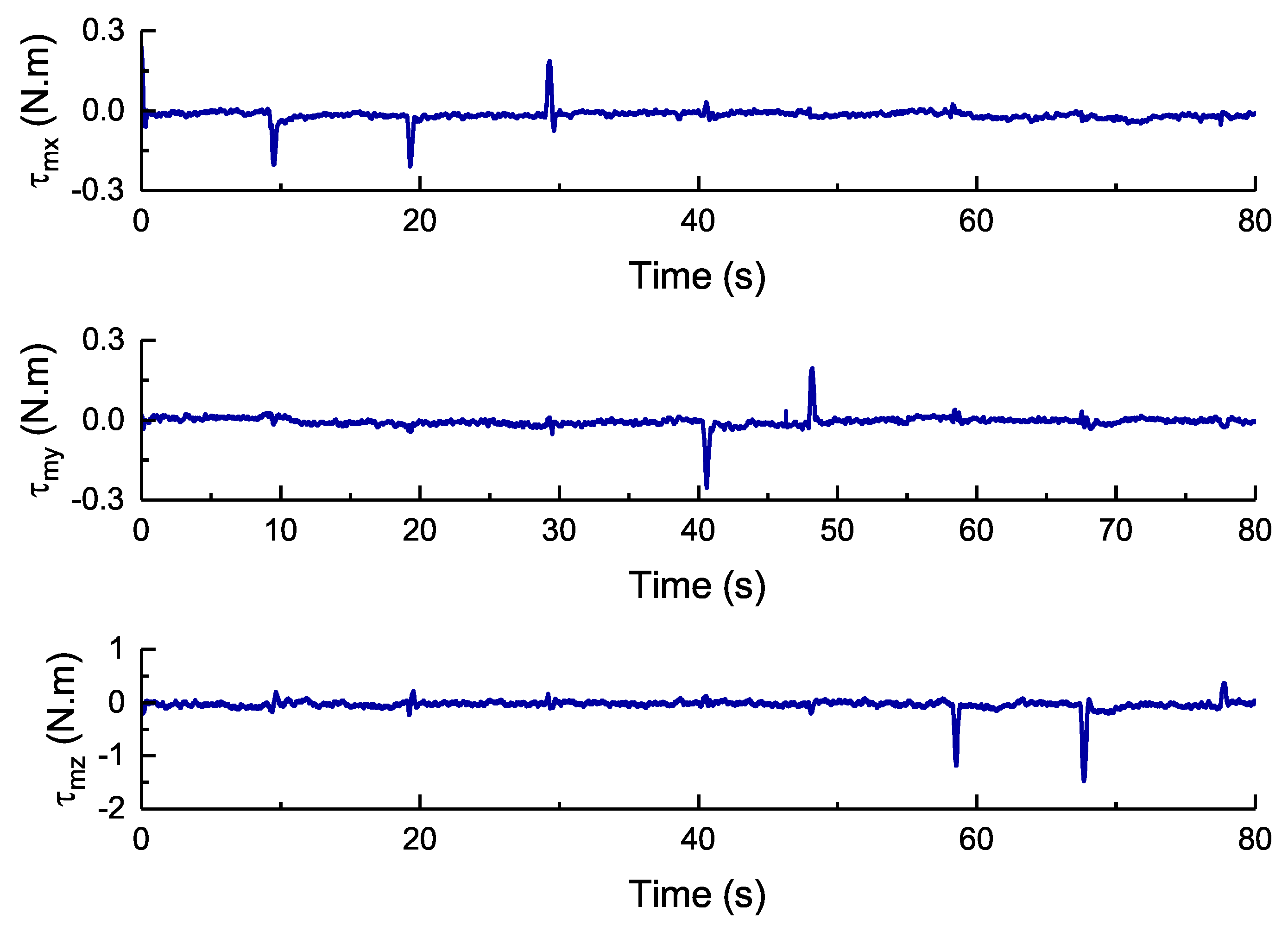
4.2.2. PI Control Experiment
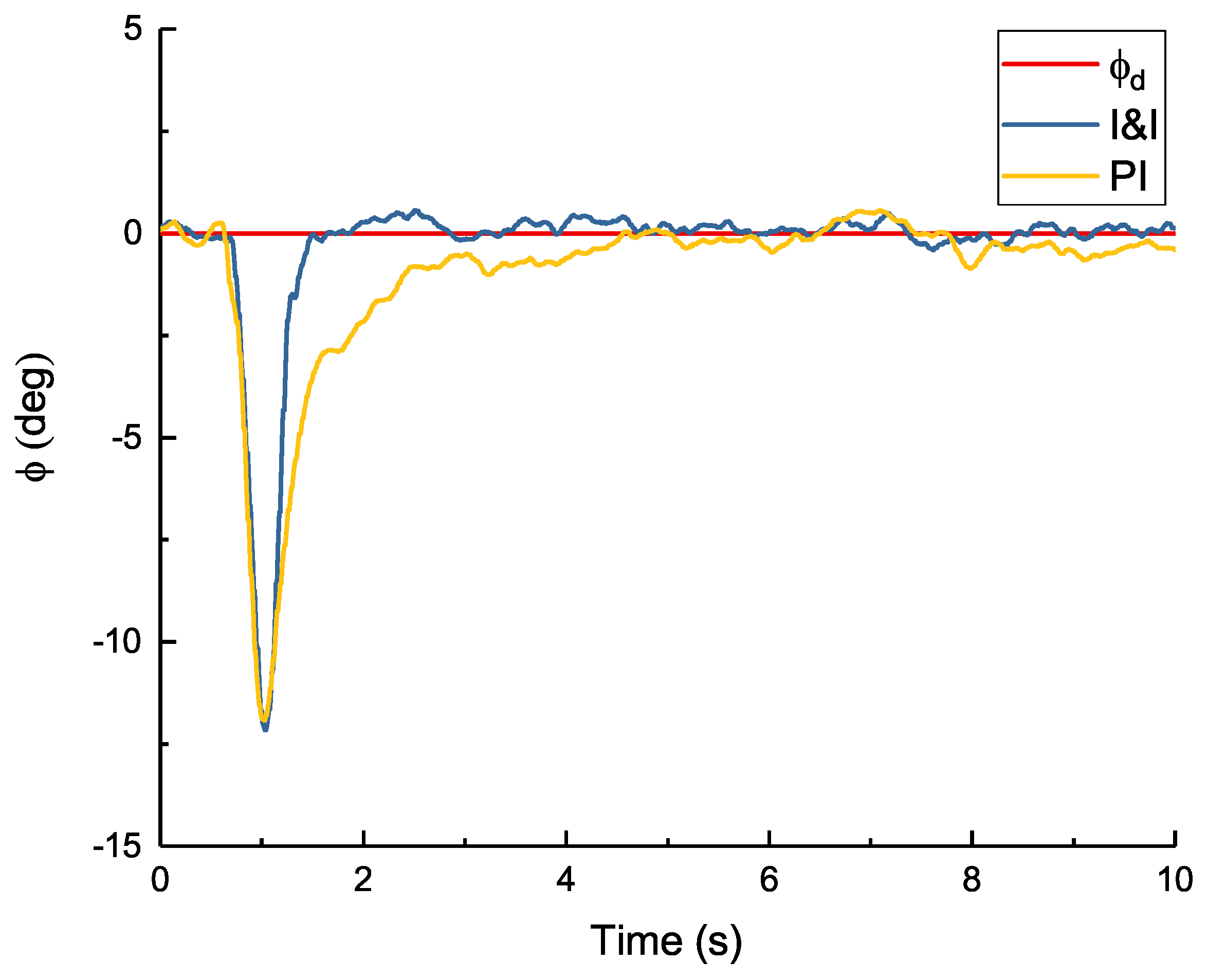
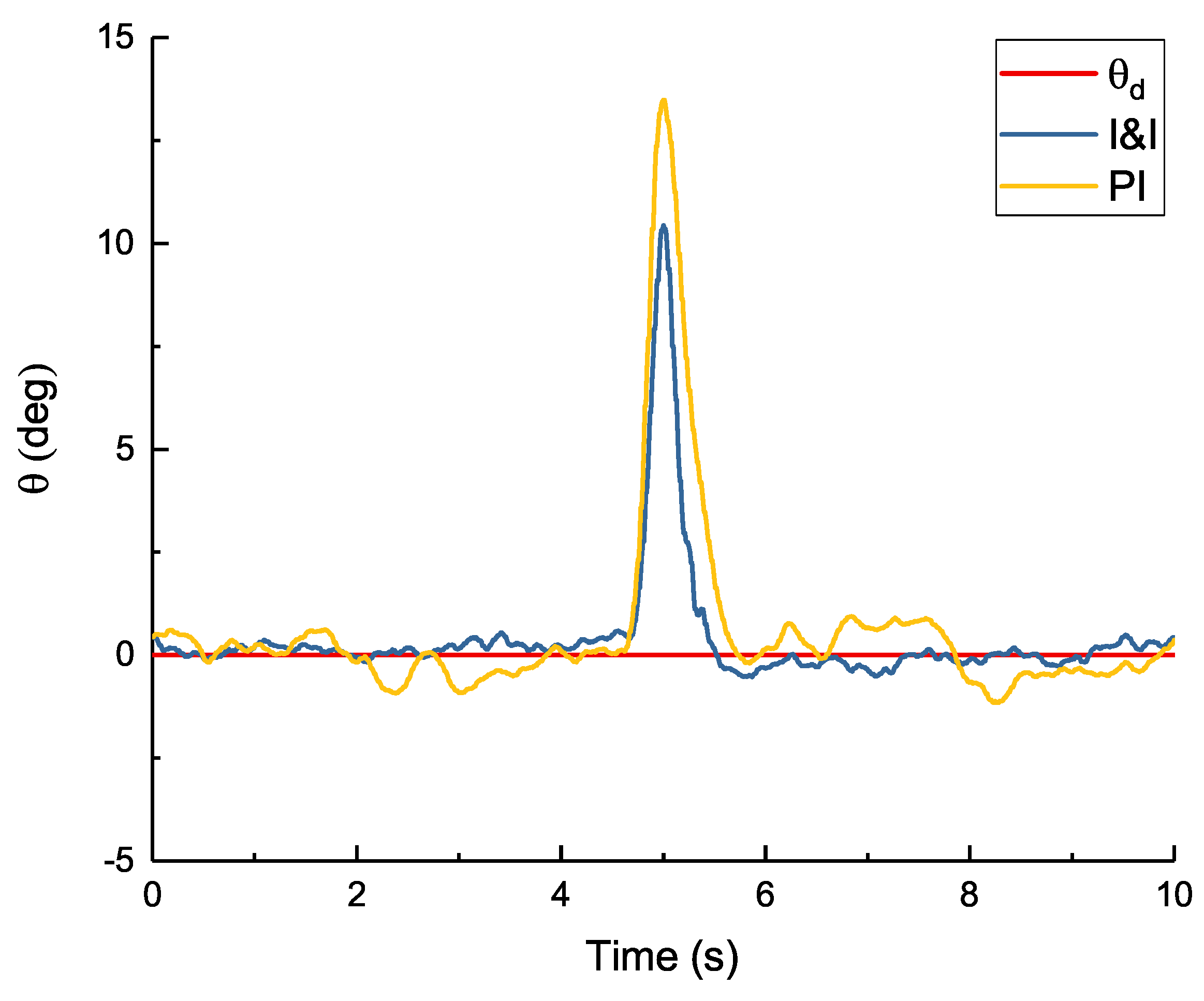
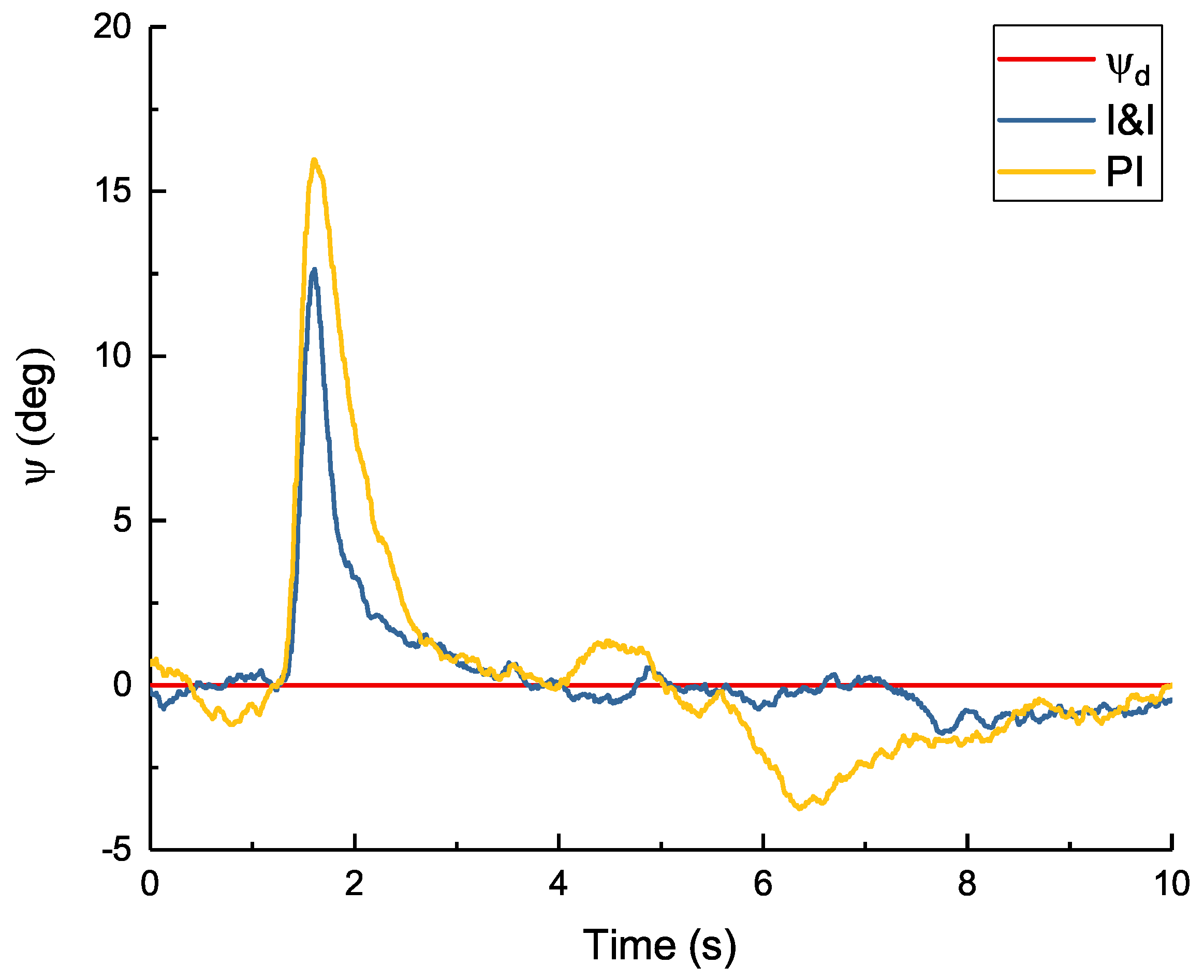
4.2.3. Comparison Between I&I and PI Control
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fossen, T. Guidance and Control of Ocean Vehicles; John Willey & Sons: Hoboken, NJ, USA, 1994. [Google Scholar]
- Li, X.; Zhao, M.; Ge, T. A Nonlinear Observer for Remotely Operated Vehicles with Cable Effect in Ocean Currents. Appl. Sci. 2018, 8, 867. [Google Scholar] [CrossRef]
- Wu, N.; Wu, C.; Ge, T.; Yang, D.; Yang, R. Pitch Channel Control of a REMUS AUV with Input Saturation and Coupling Disturbances. Appl. Sci. 2018, 8, 253. [Google Scholar] [CrossRef]
- Salgado-Jimenez, T.; Gonzalez-Lopez, J.L.; Pedraza-Ortega, J.C.; García-Valdovinos, L.G.; Martínez-Soto, L.F.; Resendiz-Gonzalez, P.A. Design of ROVs for the Mexican power and oil industries. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010; pp. 1–8. [Google Scholar]
- Soylu, S.; Proctor, A.A.; Podhorodeski, R.P.; Bradley, C.; Buckham, B.J. Precise trajectory control for an inspection class ROV. Ocean Eng. 2016, 111, 508–523. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Palomeras, N.; Vallicrosa, G.; Mallios, A.; Bosch, J.; Vidal, E.; Hurtos, N.; Carreras, M.; Ridao, P. AUV homing and docking for remote operations. Ocean Eng. 2018, 154, 106–120. [Google Scholar] [CrossRef]
- Liu, K.; Huang, Y.; Zhao, Y.; Cui, S.; Wang, X.; Wang, G. Research on error correction methods for the integrated navigation system of deep-sea human occupied vehicles. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–5. [Google Scholar]
- Hosseini, M.; Seyedtabaii, S. Robust ROV path following considering disturbance and measurement error using data fusion. Appl. Ocean Res. 2016, 54, 67–72. [Google Scholar] [CrossRef]
- Cui, R.; Zhang, X.; Cui, D. Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities. Ocean Eng. 2016, 123, 45–54. [Google Scholar] [CrossRef]
- Cui, R.; Li, Y.; Yan, W. Mutual Information-Based Multi-AUV Path Planning for Scalar Field Sampling Using Multidimensional RRT. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 993–1004. [Google Scholar] [CrossRef]
- Cui, R.; Yang, C.; Li, Y.; Sharma, S. Adaptive Neural Network Control of AUVs With Control Input Nonlinearities Using Reinforcement Learning. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1019–1029. [Google Scholar] [CrossRef]
- Nouri, N.M.; Valadi, M. Robust input design for nonlinear dynamic modeling of AUV. ISA Trans. 2017, 70, 288–297. [Google Scholar] [CrossRef] [PubMed]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Hussain, N.A.A.; Arshad, M.R.; Mohd-Mokhtar, R. Underwater glider modelling and analysis for net buoyancy, depth and pitch angle control. Ocean Eng. 2011, 38, 1782–1791. [Google Scholar] [CrossRef]
- Brown, C.L. Deep sea mining and robotics: Assessing legal, societal and ethical implications. In Proceedings of the 2017 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), Austin, TX, USA, 8–10 March 2017; pp. 1–2. [Google Scholar]
- Javaid, M.Y.; Ovinis, M.; Hashim, F.B.M.; Maimun, A.; Ahmed, Y.M.; Ullah, B. Effect of wing form on the hydrodynamic characteristics and dynamic stability of an underwater glider. Int. J. Naval Archit. Ocean Eng. 2017, 9, 382–389. [Google Scholar] [CrossRef]
- Li, Y.; Pan, D.; Zhao, Q.; Ma, Z.; Wang, X. Hydrodynamic performance of an autonomous underwater glider with a pair of bioinspired hydro wings—A numerical investigation. Ocean Eng. 2018, 163, 51–57. [Google Scholar] [CrossRef]
- Tchilian, R.D.S.; Rafikova, E.; Gafurov, S.A.; Rafikov, M. Optimal Control of an Underwater Glider Vehicle. Procedia Eng. 2017, 176, 732–740. [Google Scholar] [CrossRef]
- Bessa, W.M.; Dutra, M.S.; Kreuzer, E. An adaptive fuzzy sliding mode controller for remotely operated underwater vehicles. Robot. Auton. Syst. 2010, 58, 16–26. [Google Scholar] [CrossRef]
- Campos, E.; Monroy, J.; Abundis, H.; Chemori, A.; Creuze, V.; Torres, J. A nonlinear controller based on saturation functions with variable parameters to stabilize an AUV. Int. J. Naval Archit. Ocean Eng. 2018. [Google Scholar] [CrossRef]
- Yan, H.; Ge, T.; Li, J.W.; Wang, Q. Prediction of mode and static stability of negative buoyancy vehicle. In Proceedings of the 2011 Chinese Control and Decision Conference (CCDC), Mianyang, China, 23–25 May 2011; pp. 1903–1909. [Google Scholar]
- Ji, S.W.; Bui, V.P.; Balachandran, B.; Kim, Y.B. Robust control allocation design for marine vessel. Ocean Eng. 2013, 63, 105–111. [Google Scholar] [CrossRef]
- Xiang, X.; Lapierre, L.; Jouvencel, B. Smooth transition of AUV motion control: From fully-actuated to under-actuated configuration. Robot. Auton. Syst. 2015, 67, 14–22. [Google Scholar] [CrossRef] [Green Version]
- Xiang, X.; Yu, C.; Zhang, Q. Robust fuzzy 3D path following for autonomous underwater vehicle subject to uncertainties. Comput. Oper. Res. 2017, 84, 165–177. [Google Scholar] [CrossRef]
- Salazar-Cruz, S.; Kendoul, F.; Lozano, R.; Fantoni, I. Real-time stabilization of a small three-rotor aircraft. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 783–794. [Google Scholar] [CrossRef]
- Papachristos, C.; Tzes, A. Modeling and control simulation of an unmanned Tilt Tri-Rotor Aerial vehicle. In Proceedings of the 2012 IEEE International Conference on Industrial Technology, Athens, Greece, 19–21 March 2012; pp. 840–845. [Google Scholar]
- Ta, D.A.; Fantoni, I.; Lozano, R. Modeling and control of a tilt tri-rotor airplane. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 131–136. [Google Scholar]
- Astolfi, A.; Ortega, R. Immersion and invariance (I2): A new tool in nonlinear control design. In Proceedings of the 2001 European Control Conference (ECC), Porto, Portugal, 4–7 September 2001; pp. 2854–2859. [Google Scholar]
- Astolfi, A.; Ortega, R. Immersion and invariance: A new tool for stabilization and adaptive control of nonlinear systems. IEEE Trans. Autom. Control 2003, 48, 590–606. [Google Scholar] [CrossRef]
- Astolfi, A.; Karagiannis, D.; Ortega, R. Nonlinear and Adaptive Control with Applications; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit (SI) |
|---|---|---|
| 0.13 | m | |
| 0.075 | m | |
| 0.15 | m | |
| m | 1 | kg |
| B | 3 | N |
| 0.0061 | kg/m | |
| 0.006 | kg/m | |
| 0.0118 | kg/m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Wu, C.; Wang, J.; Ge, T. Modeling and Control of Negative-Buoyancy Tri-Tilt-Rotor Autonomous Underwater Vehicles Based on Immersion and Invariance Methodology. Appl. Sci. 2018, 8, 1150. https://doi.org/10.3390/app8071150
Wang T, Wu C, Wang J, Ge T. Modeling and Control of Negative-Buoyancy Tri-Tilt-Rotor Autonomous Underwater Vehicles Based on Immersion and Invariance Methodology. Applied Sciences. 2018; 8(7):1150. https://doi.org/10.3390/app8071150
Chicago/Turabian StyleWang, Tao, Chao Wu, Jianqin Wang, and Tong Ge. 2018. "Modeling and Control of Negative-Buoyancy Tri-Tilt-Rotor Autonomous Underwater Vehicles Based on Immersion and Invariance Methodology" Applied Sciences 8, no. 7: 1150. https://doi.org/10.3390/app8071150
APA StyleWang, T., Wu, C., Wang, J., & Ge, T. (2018). Modeling and Control of Negative-Buoyancy Tri-Tilt-Rotor Autonomous Underwater Vehicles Based on Immersion and Invariance Methodology. Applied Sciences, 8(7), 1150. https://doi.org/10.3390/app8071150