Fault Severity Monitoring of Rolling Bearings Based on Texture Feature Extraction of Sparse Time–Frequency Images


Abstract
:1. Introduction
2. First-Order Primal-Dual Algorithm-Based Sparse Time–Frequency Analysis
2.1. Model of Sparse Time–Frequency Analysis
2.2. Solution of the Model Based on the First-Order Primal-Dual Algorithm
| Algorithm 1. Sparse time–frequency analysis method based on the first-order primal-dual algorithm (STFA-PD) |
| Input: |
| Output: |
| Initialize: |
| 1: For do |
| 2: For do |
| 3: |
| 4: |
| 5: |
| 6: End For |
| 7: End for |
| 8: Return as |
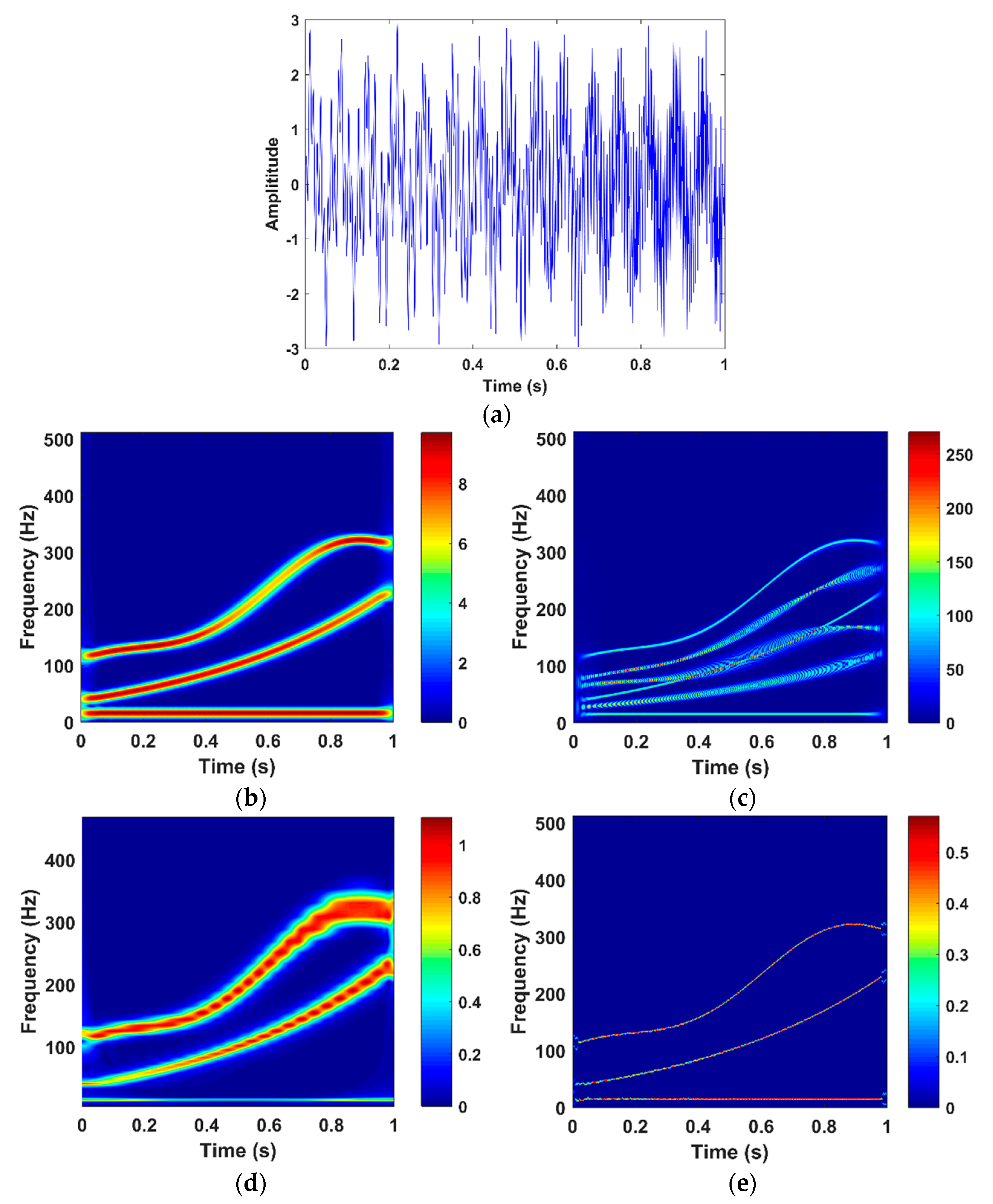
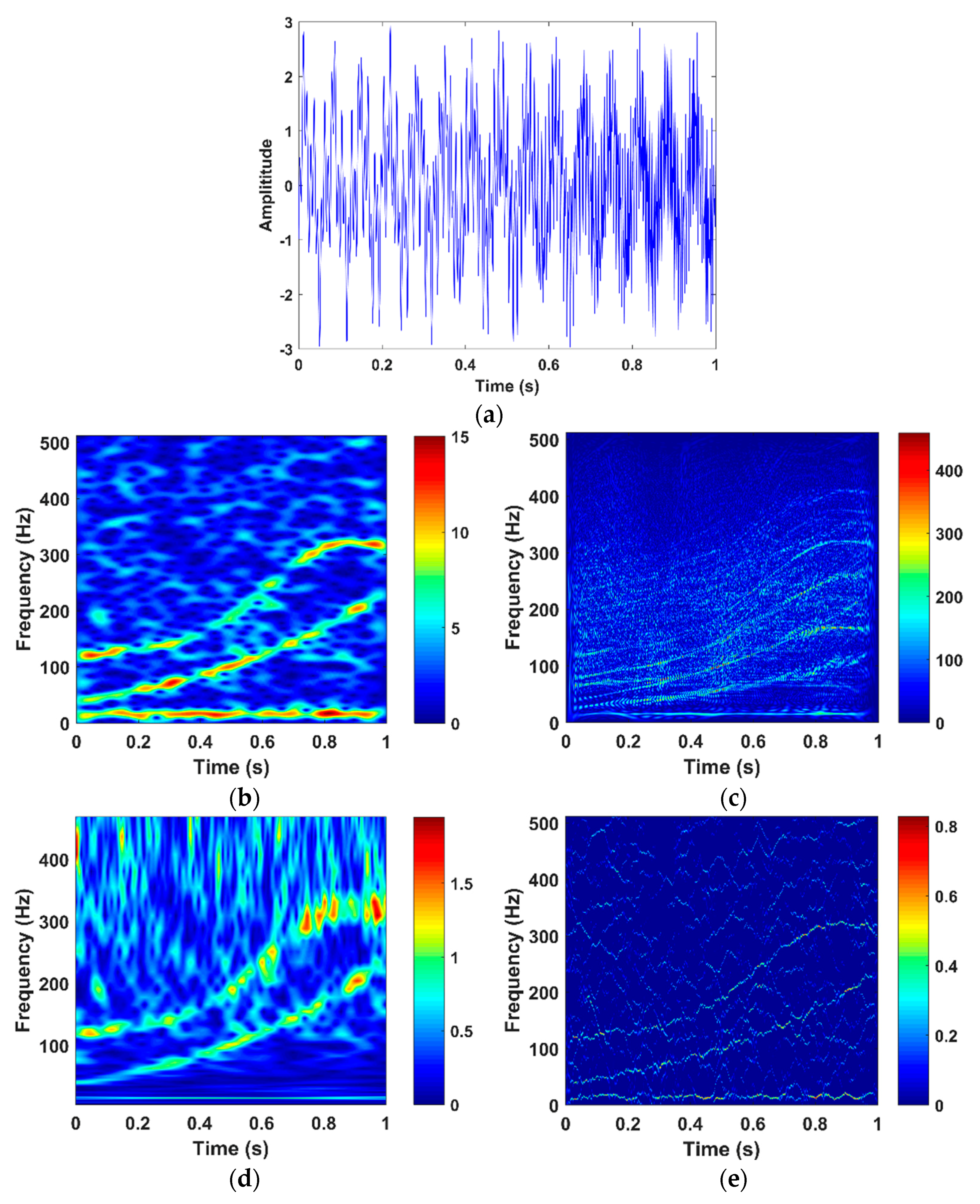
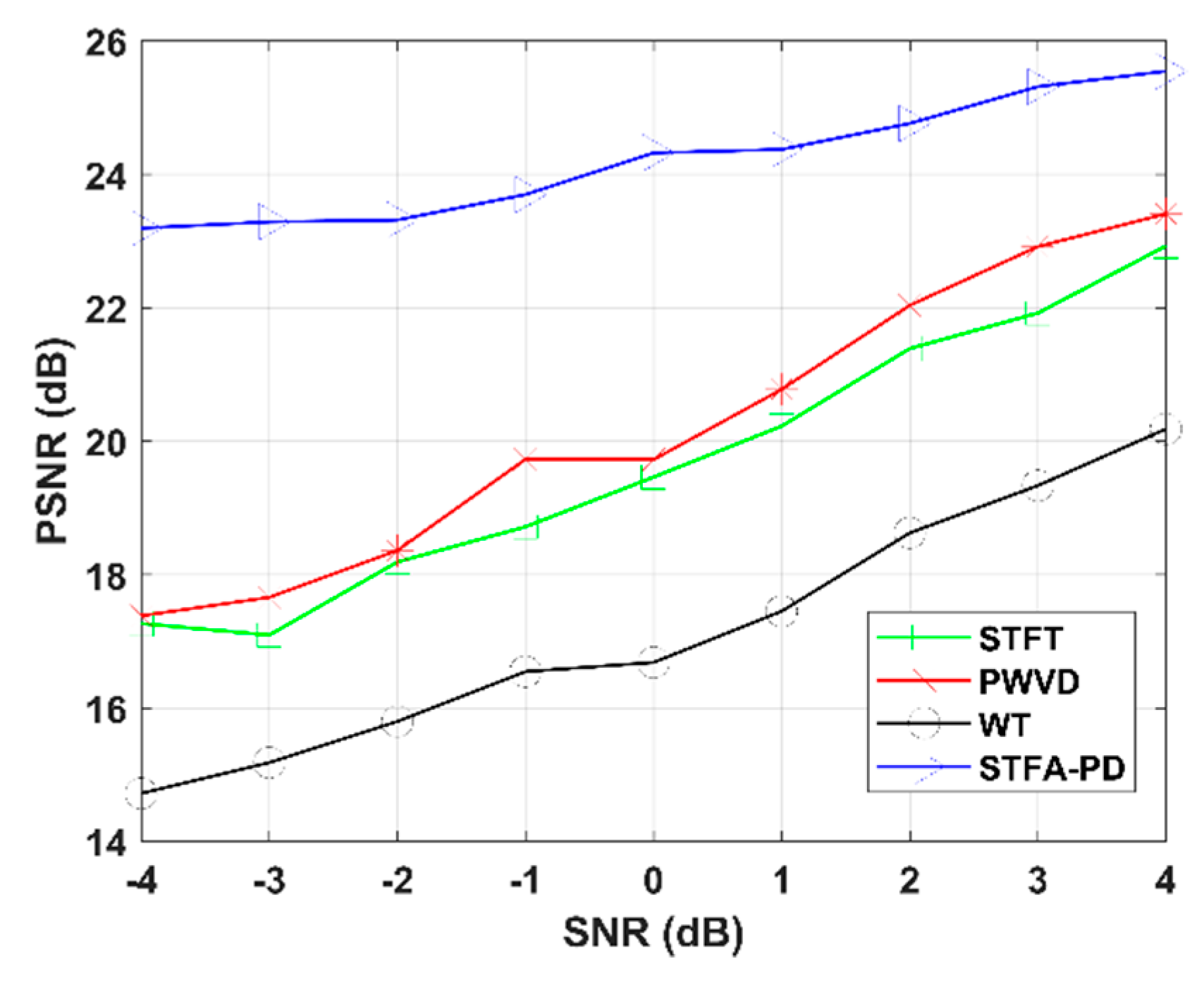
2.3. Simulation Analysis
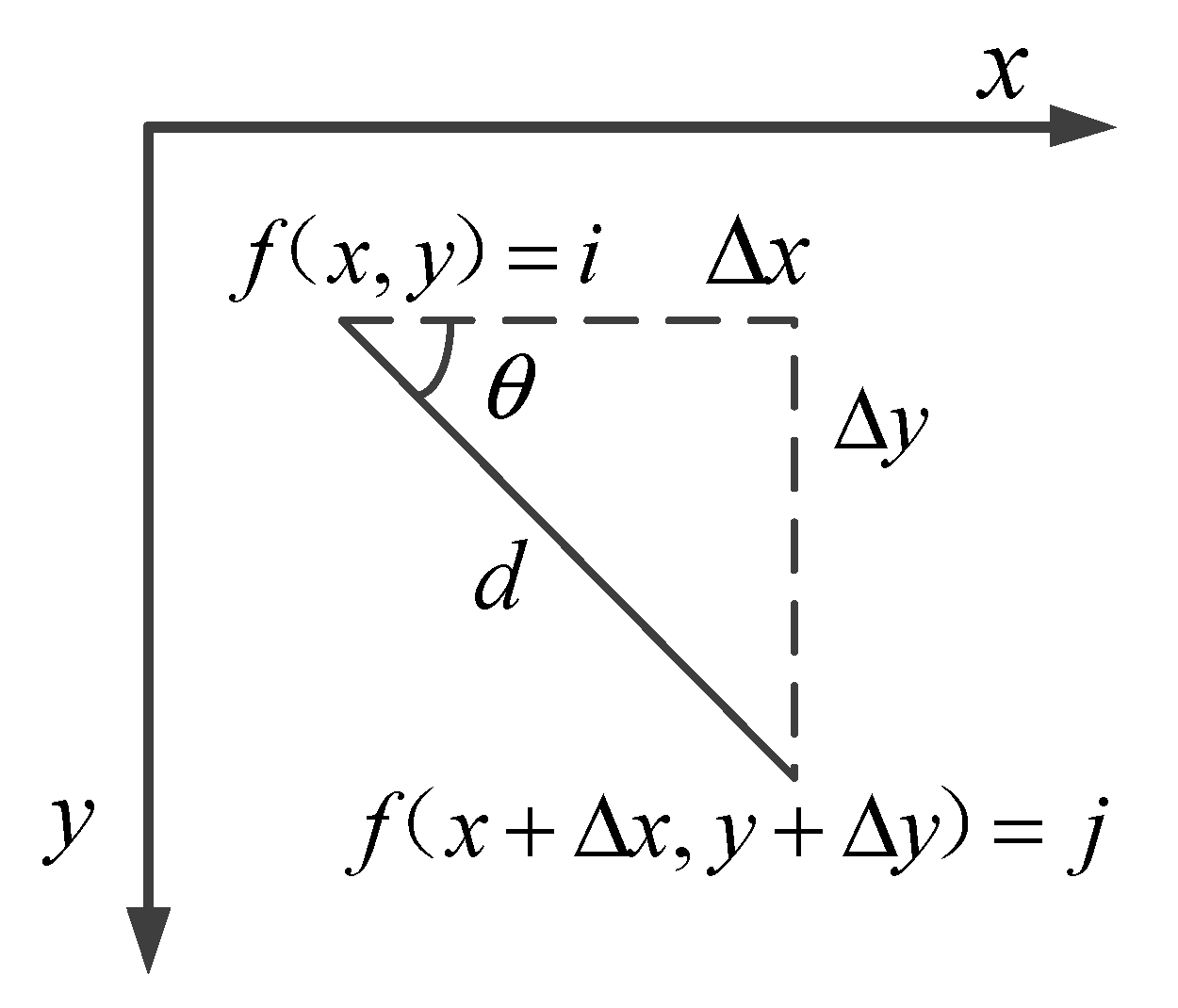
3. GLCM-Based Image Texture Features
3.1. Brief Introduction of GLCM
3.2. Statistical Features of GLCM
4. Experimental Validation and Discussion
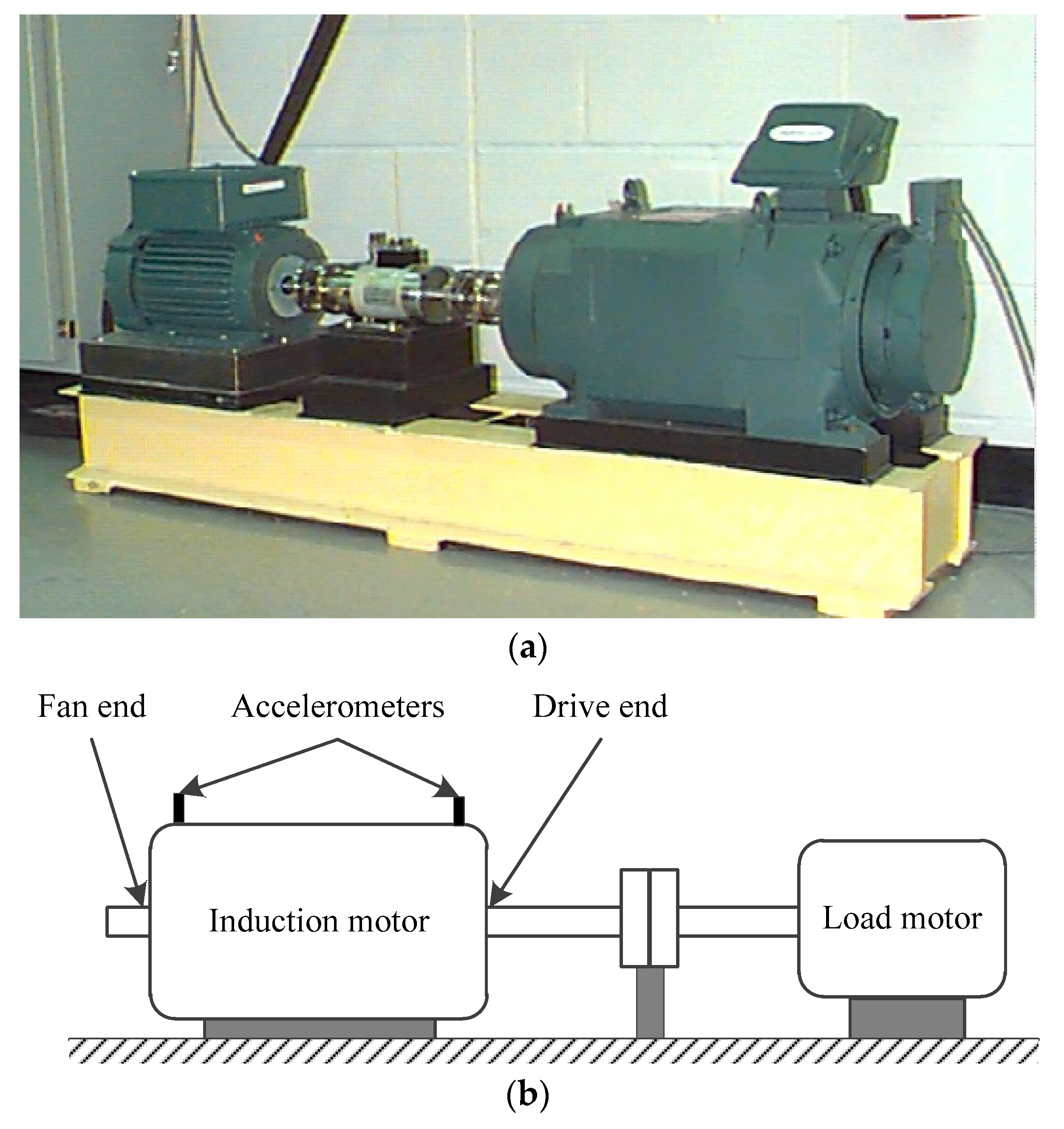
4.1. Experimental Data and Setup
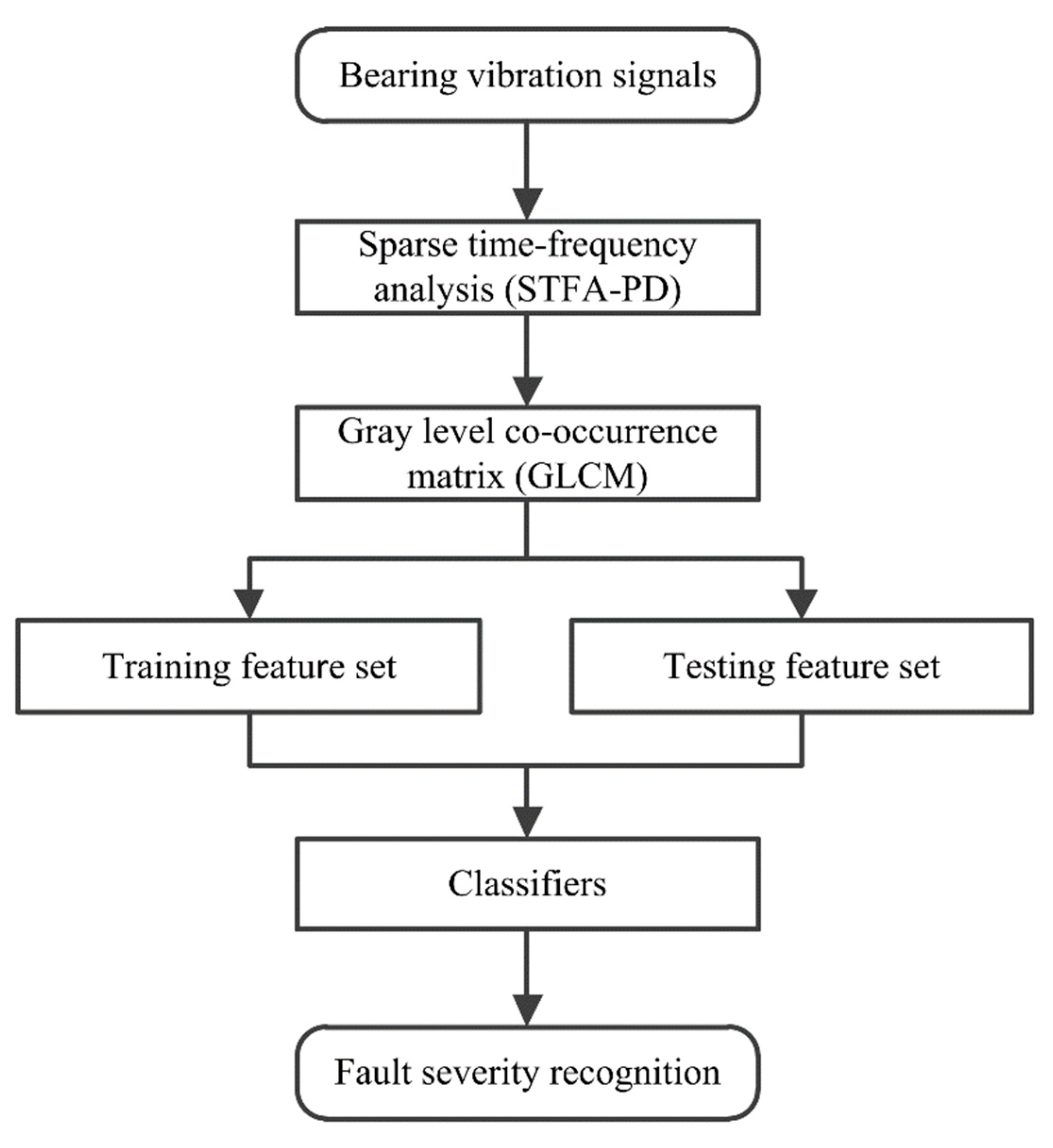
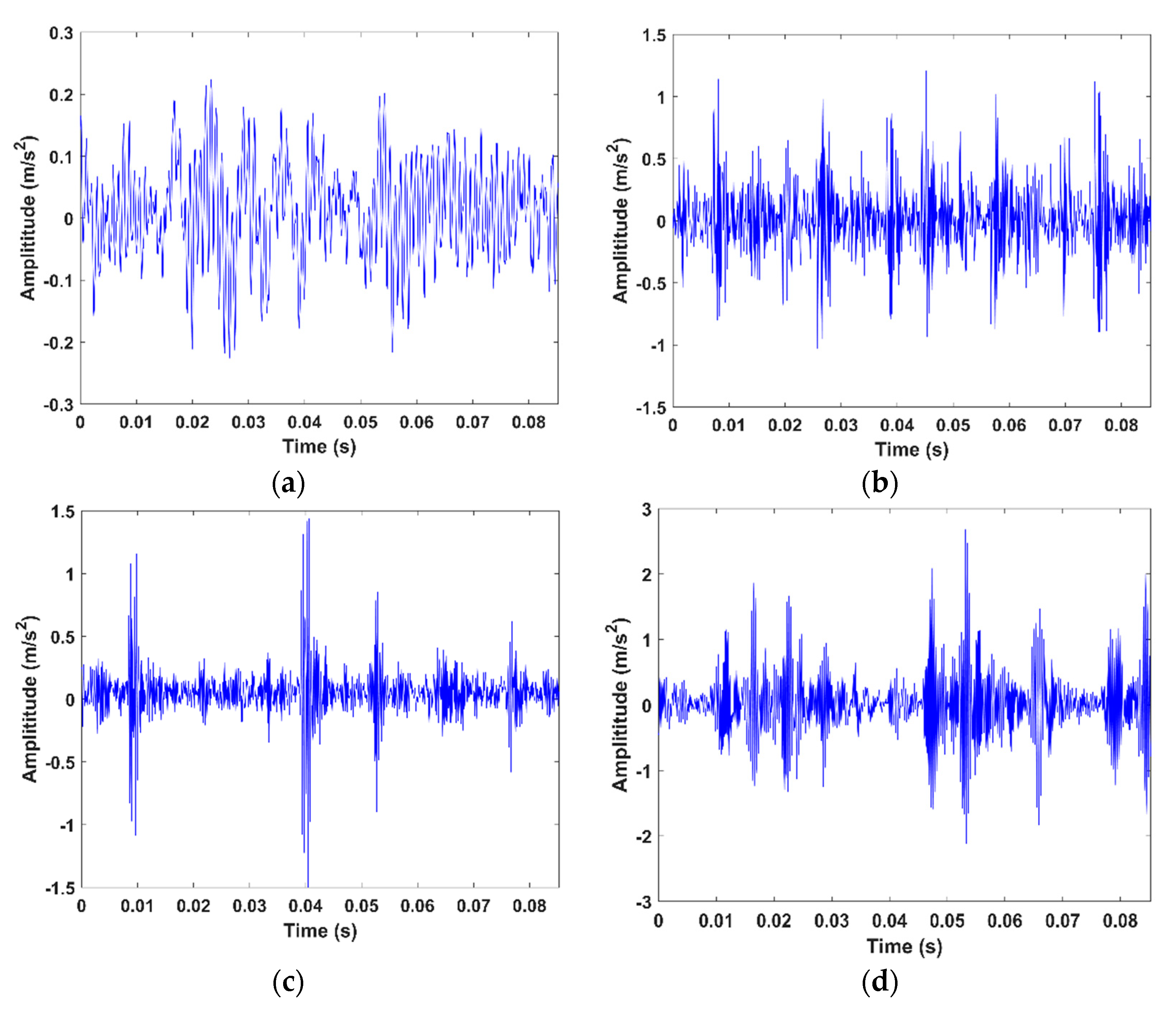
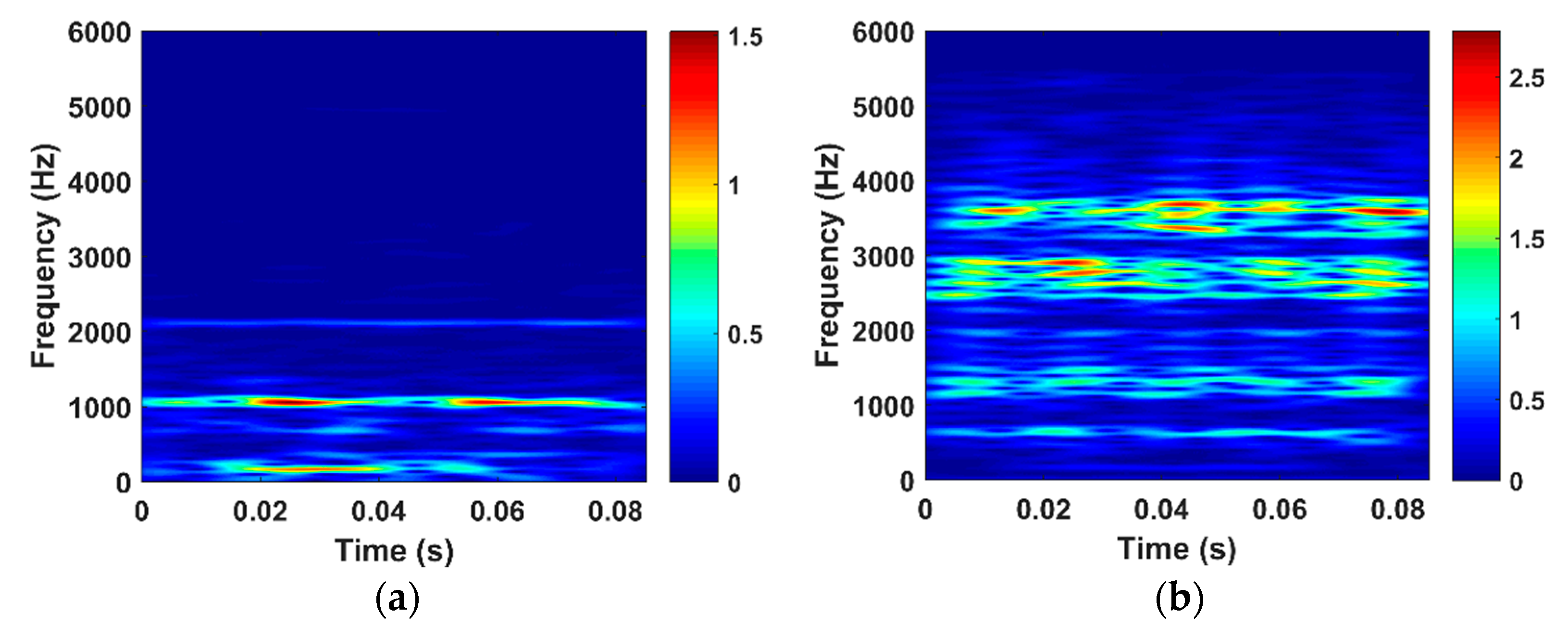
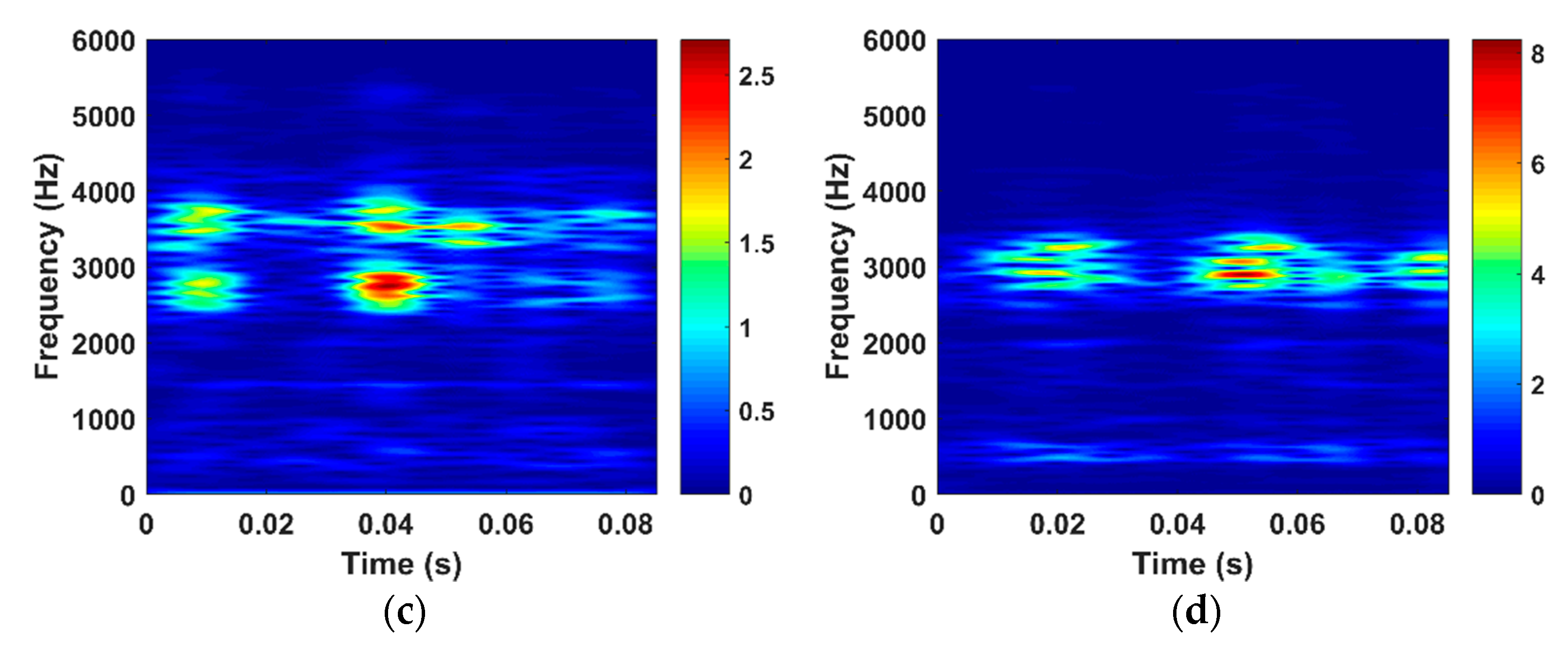
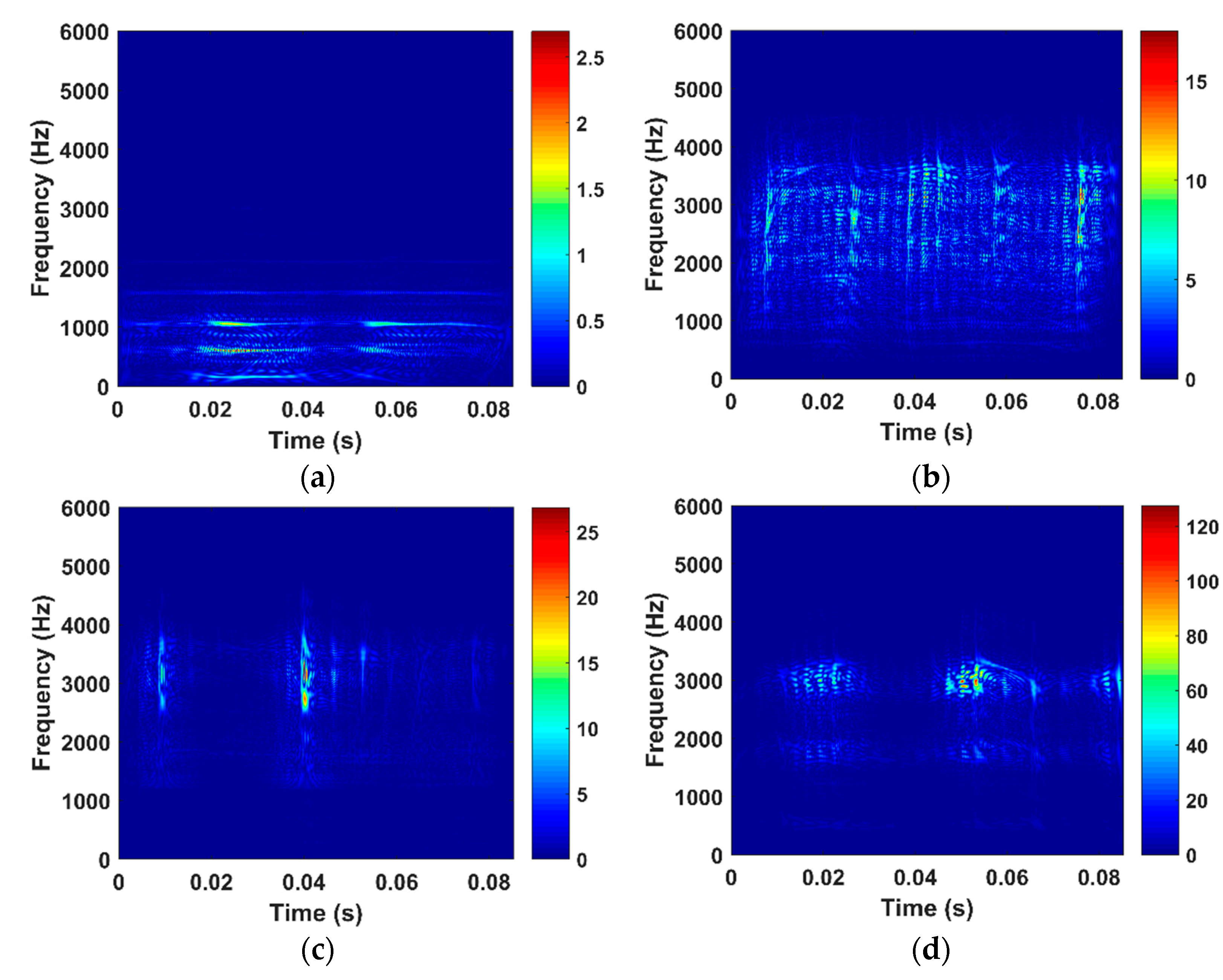
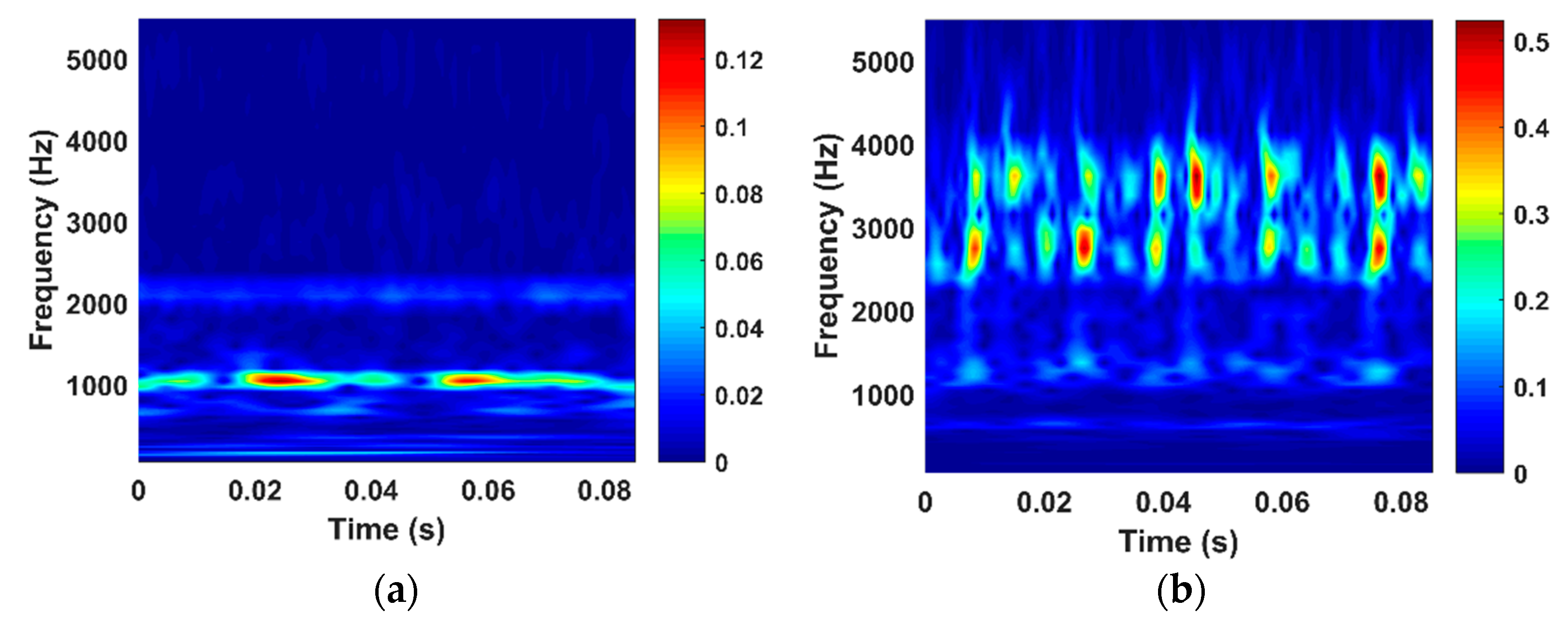
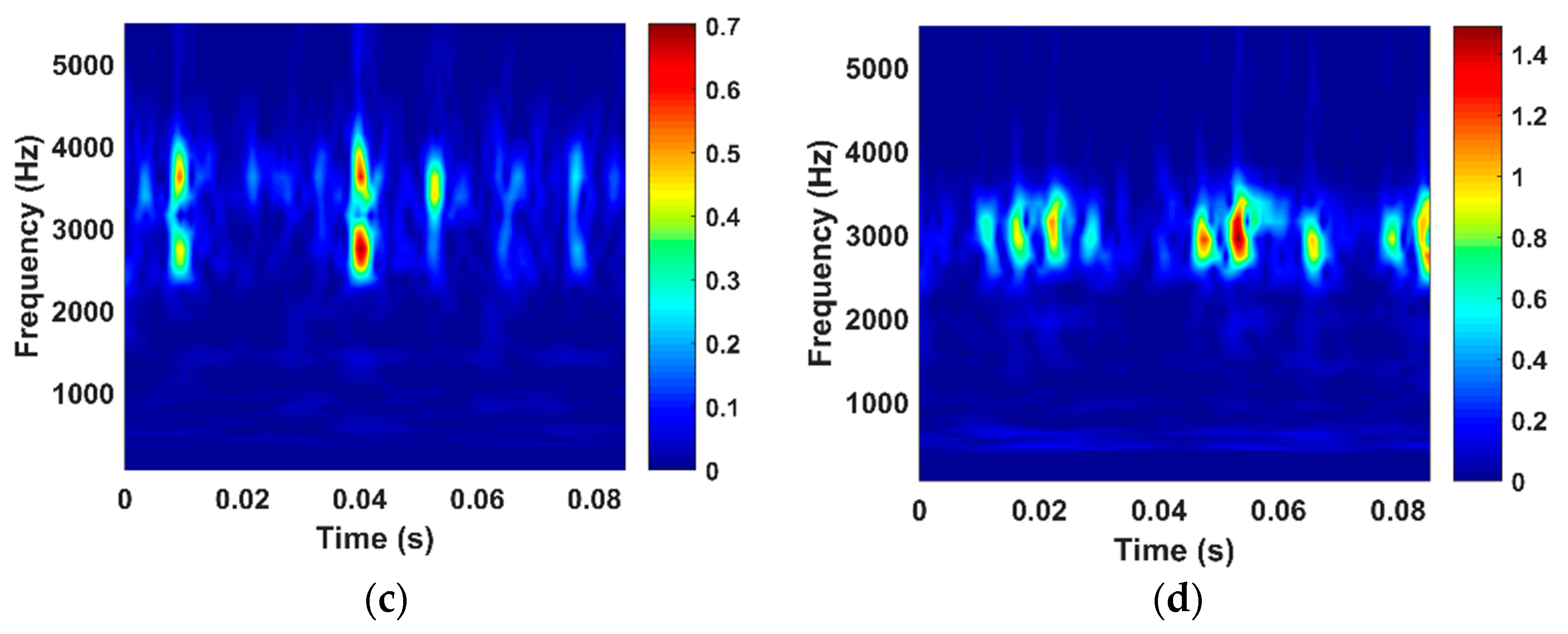
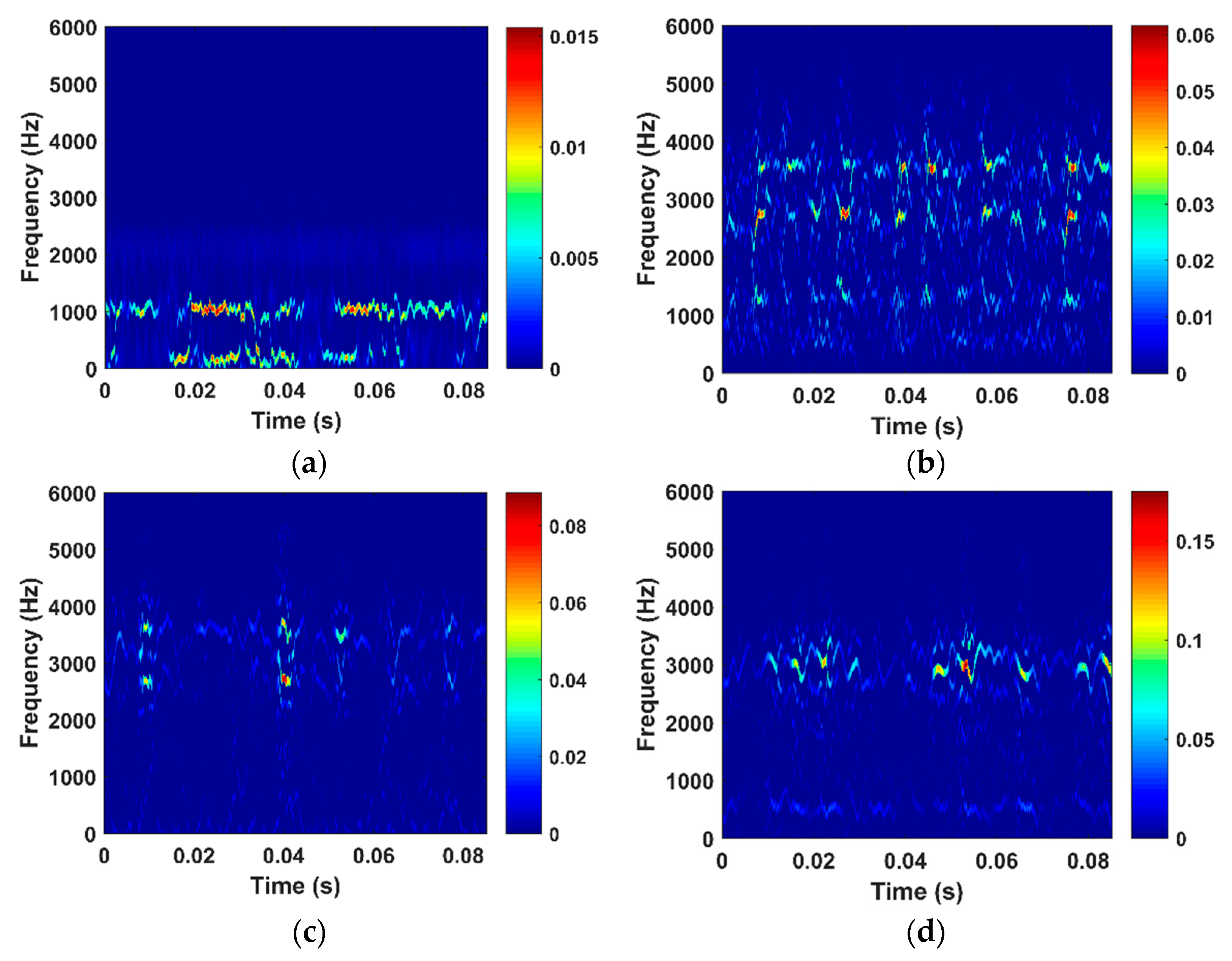
4.2. STFA-PD of Vibration Signals of Rolling Bearings
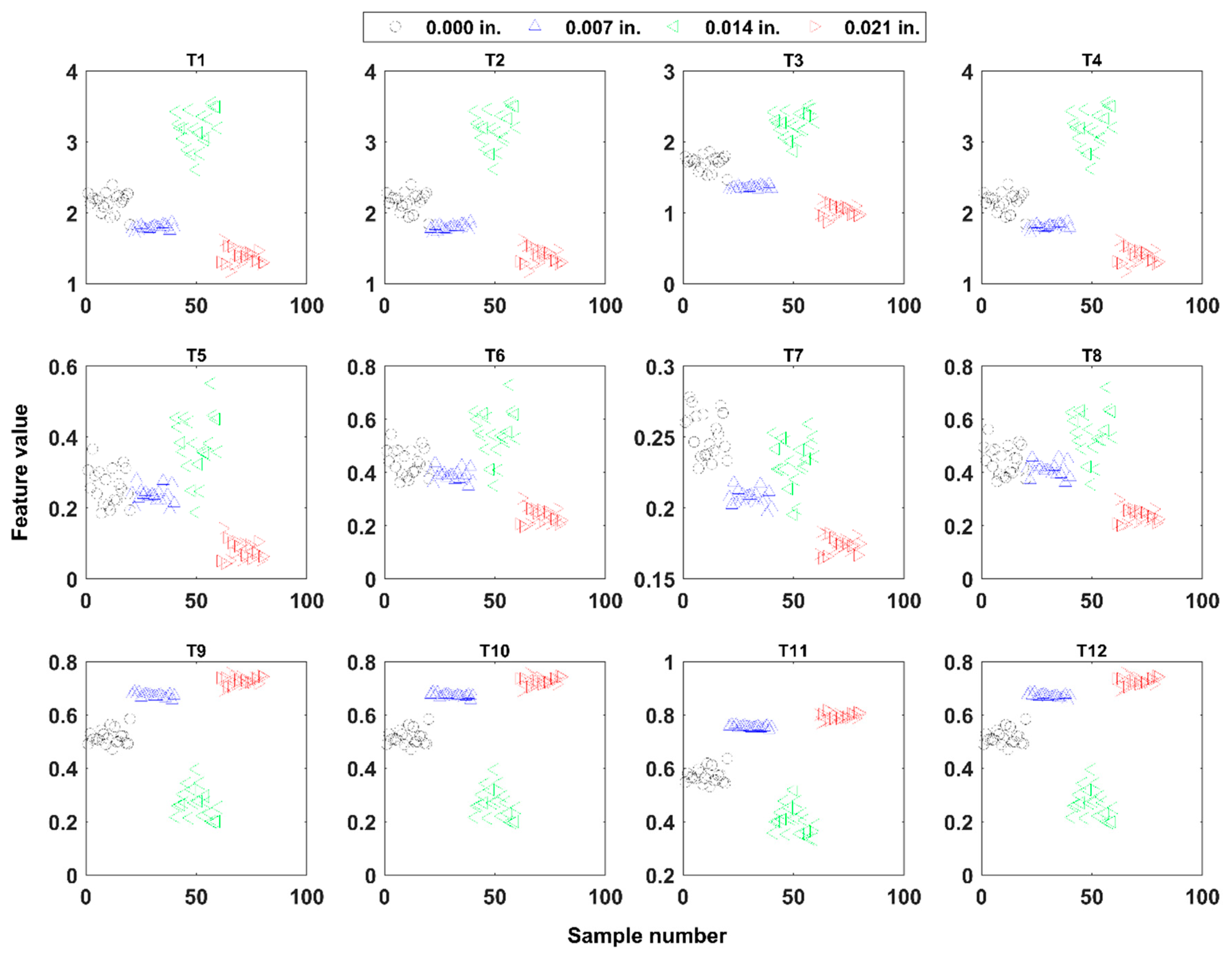
4.3. GLCM-Based Texture Features of Sparse Time–Frequency Images
4.4. Fault Severity Classification
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| TFIs | time–frequency image |
| SR | sparse representation |
| GLCM | gray level co-occurrence matrix |
| STFA-PD | sparse time–frequency analysis method based on the first-order primal-dual algorithm |
| FFT | fast Fourier transform |
| STFT | short-time Fourier transform |
| ST | S transform |
| WVD | Wigner–Ville distribution |
| PWVD | pseudo Wigner–Ville distribution |
| WT | wavelet transform |
| TFR | time–frequency representation |
| TD-2DPCA | two-direction two-dimensional principal component analysis |
| TD-2DLDA | two-direction two-dimensional linear discriminant analysis |
| 2DNMF | two-dimensional non-negative matrix factorization |
| FT | Fourier transform |
| IFT | inverse Fourier transform |
| continuous-time signal | |
| continuous-time sliding window function of time index | |
| STFT coefficient of at time index and frequency | |
| discrete signal of period N, where | |
| discrete sliding window function of time index n | |
| discrete STFT coefficient of at time index and frequency | |
| period of discrete signal | |
| operator of Fourier transform coefficient | |
| Fourier transform coefficient | |
| inverse Fourier transform matrix ; where | |
| windowed signal at time , | |
| Fourier spectrum of , | |
| short-time truncated sub-signal at time index | |
| sliding window matrix at time , | |
| sliding window matrix at time , | |
| estimated signal spectrum at time | |
| sparse time–frequency spectrum, | |
| user-specified parameter related to the noise | |
| sparse coefficient, | |
| convex set, | |
| dual variable, | |
| sparse term of Equation (9) | |
| convex conjugate function of , | |
| fidelity term of Equation (9) | |
| leaning ratios, | |
| acceleration factor, | |
| the maximum number of iterations | |
| value of in the th iteration | |
| value of in the th iteration | |
| value of in the th iteration | |
| value of in the th iteration | |
| acceleration variable of in the th iteration | |
| acceleration variable of in the th iteration | |
| a sinusoidal signal, | |
| a nonlinear frequency-modulated signal, | |
| a nonlinear frequency-modulated signal, | |
| a multi-component simulated signal, | |
| a noisy signal | |
| co-occurrence frequency of a pixel pairs | |
| total number satisfying the conditions | |
| co-occurrence probability |
References
- Cui, L.; Chunqing, M.A.; Zhang, F.; Wang, H. Quantitative diagnosis of fault severity trend of rolling element bearings. Chin. J. Mech. Eng. 2015, 28, 1254–1260. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase induction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Berredjem, T.; Benidir, M. Bearing faults diagnosis using fuzzy expert system relying on an improved range overlaps and similarity method. Expert Syst. Appl. 2018, 108, 134–142. [Google Scholar] [CrossRef]
- Hong, H.; Liang, M. Fault severity assessment for rolling element bearings using the Lempel–Ziv complexity and continuous wavelet transform. J. Sound Vib. 2009, 320, 452–468. [Google Scholar] [CrossRef]
- Hong, S.; Zhou, Z.; Zio, E.; Hong, K. Condition assessment for the performance degradation of bearing based on a combinatorial feature extraction method. Dig. Signal Process. 2014, 27, 159–166. [Google Scholar] [CrossRef]
- Duan, Z.; Wu, T.; Guo, S.; Shao, T.; Malekian, R.; Li, Z. Development and trend of condition monitoring and fault diagnosis of multi-sensors information fusion for rolling bearings: A review. Int. J. Adv. Manuf. Technol. 2018, 96, 803–819. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J. Performance degradation assessment of rolling bearing based on bispectrum and support vector data description. J. Vib. Control 2013, 20, 2032–2041. [Google Scholar] [CrossRef]
- Cerrada, M.; Sánchez, R.; Li, C.; Pacheco, F.; Cabrera, D.; José, V.D.O.; Vásquez, R.E. A review on data-driven fault severity assessment in rolling bearings. Mech. Syst. Signal Process. 2018, 99, 169–196. [Google Scholar] [CrossRef]
- Molina, M.A.; Gohar, R. Hydrodynamic lubrication of ball-bearing cage pockets. ARCHIVE J. Mech. Eng. Sci. 1978, 20, 11–20. [Google Scholar] [CrossRef]
- Rahnejat, H.; Gohar, R. The vibrations of radial ball bearings. ARCHIVE Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 1985, 199, 181–193. [Google Scholar] [CrossRef]
- Wardle, F.P. Vibration forces produced by waviness of the rolling surfaces of thrust loaded ball bearings, part 1: Theory. Proc. Inst. Mech. Eng. 1988, 202, 305–312. [Google Scholar] [CrossRef]
- Johns-Rahnejat, P.; Gohar, R. Point contact elastohydrodynamic pressure distribution and sub-surface stress field. In Proceedings of the International Tri-Annual Conference on Multi-Body Dynamics: Monitoring and Simulation Techniques, Bradford, UK, 25–27 March 1997; pp. 161–177. [Google Scholar]
- Rai, A.; Upadhyay, S.H. A review on signal processing techniques utilized in the fault diagnosis of rolling element bearings. Tribol. Int. 2016, 96, 289–306. [Google Scholar] [CrossRef]
- Borghesani, P.; Ricci, R.; Chatterton, S.; Pennacchi, P. A new procedure for using envelope analysis for rolling element bearing diagnostics in variable operating conditions. Mech. Syst. Signal Process. 2013, 38, 23–35. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Peeters, C.; Guillaume, P.; Helsen, J. A comparison of cepstral editing methods as signal pre-processing techniques for vibration-based bearing fault detection. Mech. Syst. Signal Process. 2017, 91, 354–381. [Google Scholar] [CrossRef]
- Bi, G.; Chen, J.; He, J.; Zhou, F.; Zhang, G.C. Application of degree of cyclostationarity in rolling element bearing diagnosis. Key Eng. Mater. 2005, 293–294, 347–354. [Google Scholar] [CrossRef]
- Liu, X.; Bo, L.; Peng, C. Application of order cyclostationary demodulation to damage detection in a direct-driven wind turbine bearing. Meas. Sci. Technol. 2014, 25, 25004–25011. [Google Scholar] [CrossRef]
- Acuña, D.Q.; Vicuña, C.M. Damage Assessment of Rolling Element Bearing Using Cyclostationary Processing of Ae Signals with Electromagnetic Interference; Springer International Publishing: Basel, Switzerland, 2015; pp. 43–54. [Google Scholar]
- Feng, Z.; Liang, M.; Chu, F. Recent advances in time–frequency analysis methods for machinery fault diagnosis: A review with application examples. Mech. Syst. Signal Process. 2013, 38, 165–205. [Google Scholar] [CrossRef]
- Zhao, M.; Tang, B.; Tan, Q. Fault diagnosis of rolling element bearing based on s transform and gray level co-occurrence matrix. Meas. Sci. Technol. 2015, 26, 085008. [Google Scholar] [CrossRef]
- Peng, Z.K.; Chu, F.L. Application of the wavelet transform in machine condition monitoring and fault diagnostics: A review with bibliography. Mech. Syst. Signal Process. 2004, 18, 199–221. [Google Scholar] [CrossRef]
- Chen, Y.P.; Peng, Z.M.; He, Z.H.; Lin, T.; Zhang, D.J. The optimal fractional gabor transform based on the adaptive window function and its application. Appl. Geophys. 2013, 10, 305–313. [Google Scholar] [CrossRef]
- Chen, Y.; Peng, Z.; Cheng, Z.; Tian, L. Seismic signal time-frequency analysis based on multi-directional window using greedy strategy. J. Appl. Geophys. 2017, 143, 116–128. [Google Scholar] [CrossRef]
- Cohen, L. Time-frequency distribution—A review. Proc. IEEE 1989, 77, 941–981. [Google Scholar] [CrossRef]
- Hlawatsch, F.; Boudreaux-Bartels, G.F. Linear and quadratic time-frequency signal representations. IEEE Signal Process. Mag. 1992, 9, 21–67. [Google Scholar] [CrossRef]
- Hess-Nielsen, N.; Wickerhauser, M.V. Wavelets and time-frequency analysis. Proc. IEEE 1996, 84, 523–540. [Google Scholar] [CrossRef] [Green Version]
- Sejdić, E.; Djurović, I.; Jiang, J. Time–frequency feature representation using energy concentration: An overview of recent advances. Digit. Signal Process. 2009, 19, 153–183. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The s transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Vafaei, S.; Rahnejat, H. Indicated repeatable runout with wavelet decomposition (irr-wd) for effective determination of bearing-induced vibration. J. Sound Vib. 2003, 260, 67–82. [Google Scholar] [CrossRef]
- Mallat, S.G.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.S.; Donoho, D.L.; Saunders, M.A. Atomic decomposition by basis pursuit. Siam Rev. 2001, 43, 129–159. [Google Scholar] [CrossRef]
- Borgnat, P.; Flandrin, P. Time-frequency localization from sparsity constraints. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March 2008–4 April 2008; pp. 3785–3788. [Google Scholar]
- Elad, M. Sparse and Redundant Representations: From Theory to Applications in Signal and Image Processing; Springer Publishing Company, Incorporated: Basel, Switzerland, 2010; pp. 1094–1097. [Google Scholar]
- Cheng, H.; Liu, Z.; Yang, L.; Chen, X. Sparse representation and learning in visual recognition: Theory and applications. Signal Process. 2013, 93, 1408–1425. [Google Scholar] [CrossRef]
- Wang, C.; Gan, M.; Zhu, C.A. Fault feature extraction of rolling element bearings based on wavelet packet transform and sparse representation theory. J. Intell. Manuf. 2015, 11, 1–15. [Google Scholar] [CrossRef]
- Liu, Z.; Wei, X.; Li, X. Aliasing-free micro-doppler analysis based on short-time compressed sensing. Signal Process. IET 2013, 8, 176–187. [Google Scholar] [CrossRef]
- Liu, Z.; You, P.; Wei, X.; Liao, D.; Li, X. High resolution time-frequency distribution based on short-time sparse representation. Circ. Syst. Signal Process. 2014, 33, 3949–3965. [Google Scholar] [CrossRef]
- Gholami, A. Sparse time–frequency decomposition and some applications. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3598–3604. [Google Scholar] [CrossRef]
- Hu, J.; He, X.; Li, W.; Ai, H.; Li, H.; Xie, J. Parameter estimation of maneuvering targets in othr based on sparse time-frequency representation. J. Syst. Eng. Electron. 2016, 27, 574–580. [Google Scholar] [CrossRef]
- Chambolle, A.; Pock, T. A first-order primal-dual algorithm for convex problems with applications to imaging. J. Math. Imaging Vis. 2011, 40, 120–145. [Google Scholar] [CrossRef]
- Sidky, E.Y.; Jørgensen, J.H.; Pan, X. Convex optimization problem prototyping for image reconstruction in computed tomography with the chambolle-pock algorithm. Phys. Med. Biol. 2012, 57, 3065–3091. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Zhang, P.L.; Liu, D.S.; Mi, S.S.; Ren, G.Q.; Tian, H. Feature extraction for rolling element bearing fault diagnosis utilizing generalized s transform and two-dimensional non-negative matrix factorization. J. Sound Vib. 2011, 330, 2388–2399. [Google Scholar] [CrossRef]
- Wang, W.G.; Liu, Z.S. Classification of time-frequency images based on locality-constrained linear coding optimization model for rotating machinery fault diagnosis. ARCHIVE Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2015, 229, 3350–3360. [Google Scholar] [CrossRef]
- Li, W.; Lin, L.; Shan, W. Bearing fault diagnosis based on generalized s-transform and two-directional 2dpca. Zhendong Ceshi Yu Zhenduan/J. Vib. Meas. Diagn. 2015, 35, 499–506. [Google Scholar]
- Li, B.; Zhang, P.L.; Liu, D.S.; Mi, S.S.; Liu, P.Y. Classification of time-frequency representations based on two-direction 2dlda for gear fault diagnosis. Appl. Soft Comput. J. 2011, 11, 5299–5305. [Google Scholar] [CrossRef]
- Haraclick, R.M. Texture features for image classification. IEEE Trans. Syst. Man. Cybern. 1973, 3, 610–621. [Google Scholar] [CrossRef]
- Nawab, S.H. Short-Time Fourier Transform. Adv. Top. Signal Process. 1988, 32, 289–337. [Google Scholar]
- Pantic, I.; Dimitrijevic, D.; Nesic, D.; Petrovic, D. Gray level co-occurrence matrix algorithm as pattern recognition biosensor for oxidopamine-induced changes in lymphocyte chromatin architecture. J. Theor. Biol. 2016, 406, 124–128. [Google Scholar] [CrossRef] [PubMed]
- Baraldi, A.; Parmiggiani, F. Investigation of the textural characteristics associated with gray level cooccurrence matrix statistical parameters. IEEE Trans. Geosci. Remote Sens. 1995, 33, 293–304. [Google Scholar] [CrossRef]
- Smith, W.A.; Randall, R.B. Rolling element bearing diagnostics using the case western reserve university data: A benchmark study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]
- Loparo, K.A. Bearings Vibration Data Set, Case Western Reserve University. Available online: http://csegroups.case.edu/bearingdatacenter/pages/download-data-file (accessed on 27 October 2017).
- Pang, B.; Tang, G.; Tian, T.; Zhou, C. Rolling bearing fault diagnosis based on an improved htt transform. Sensors 2018, 18, 1203. [Google Scholar] [CrossRef] [PubMed]
- Grother, P.J.; Candela, G.T.; Blue, J.L. Fast implementations of nearest neighbor classifiers. Pattern Recognit. 1997, 30, 459–465. [Google Scholar] [CrossRef] [Green Version]
- Ye, J.; Xiong, T. Svm versus least squares svm. J. Mach. Learn. Res. 2007, 2, 644–651. [Google Scholar]
- Zhang, Y.; Zhang, C.; Sun, J.; Jingjing, G. Improved wind speed prediction using empirical mode decomposition. Adv. Electr. Comput. Eng. 2018, 18, 3–10. [Google Scholar] [CrossRef]
- Zhang, C.; Peng, Z.; Chen, S.; Li, Z.; Wang, J. A gearbox fault diagnosis method based on frequency-modulated empirical mode decomposition and support vector machine. ARCHIVE Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2016, 232, 369–380. [Google Scholar] [CrossRef]
- Ls-svmlab1.8. Available online: http://www.esat.kuleuven.ac.be/sista/lssvmlab/ (accessed on 14 January 2018).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | Fault Type | Severity Degree (inches) |
|---|---|---|
| 1 | Inner race fault | 0.000 |
| 0.007 | ||
| 0.014 | ||
| 0.021 | ||
| 2 | Outer race fault | 0.000 |
| 0.007 | ||
| 0.014 | ||
| 0.021 | ||
| 3 | Ball fault | 0.000 |
| 0.007 | ||
| 0.014 | ||
| 0.021 |
| Method | Accuracy (%) | |||
|---|---|---|---|---|
| Test 1 | Test 2 | Test 3 | ||
| STFA-PD | 1NNC | 99.50 | 99.25 | 83.75 |
| STFT | 97.00 | 97.00 | 77.25 | |
| PWVD | 85.75 | 94.00 | 75.00 | |
| WT | 91.50 | 98.75 | 74.00 | |
| STFA-PD | LS-SVM | 100.00 | 100.00 | 96.50 |
| STFT | 100.00 | 100.00 | 84.25 | |
| PWVD | 98.25 | 99.00 | 84.50 | |
| WT | 100.00 | 100.00 | 93.75 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, Y.; Chen, Y.; Meng, G.; Ding, J.; Xiao, Y. Fault Severity Monitoring of Rolling Bearings Based on Texture Feature Extraction of Sparse Time–Frequency Images. Appl. Sci. 2018, 8, 1538. https://doi.org/10.3390/app8091538
Du Y, Chen Y, Meng G, Ding J, Xiao Y. Fault Severity Monitoring of Rolling Bearings Based on Texture Feature Extraction of Sparse Time–Frequency Images. Applied Sciences. 2018; 8(9):1538. https://doi.org/10.3390/app8091538
Chicago/Turabian StyleDu, Yan, Yingpin Chen, Guoying Meng, Jun Ding, and Yajing Xiao. 2018. "Fault Severity Monitoring of Rolling Bearings Based on Texture Feature Extraction of Sparse Time–Frequency Images" Applied Sciences 8, no. 9: 1538. https://doi.org/10.3390/app8091538
APA StyleDu, Y., Chen, Y., Meng, G., Ding, J., & Xiao, Y. (2018). Fault Severity Monitoring of Rolling Bearings Based on Texture Feature Extraction of Sparse Time–Frequency Images. Applied Sciences, 8(9), 1538. https://doi.org/10.3390/app8091538