Acoustic Emission Monitoring of Fatigue Crack Growth in Mooring Chains

 ,
, 
Abstract
:Featured Application
Abstract
1. Introduction
2. Experimental Procedure
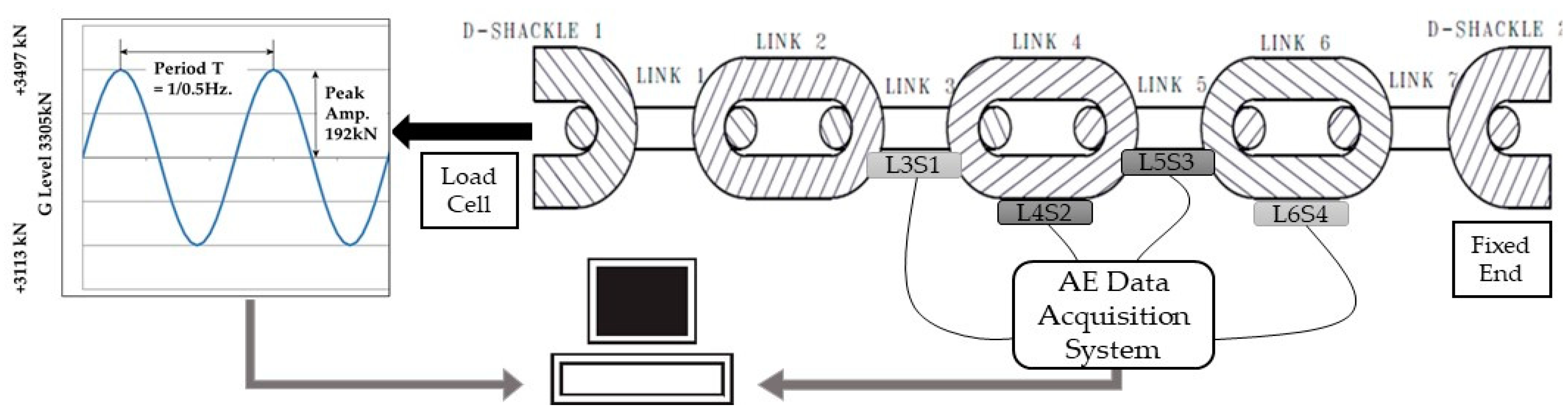
2.1. Test Rig Description
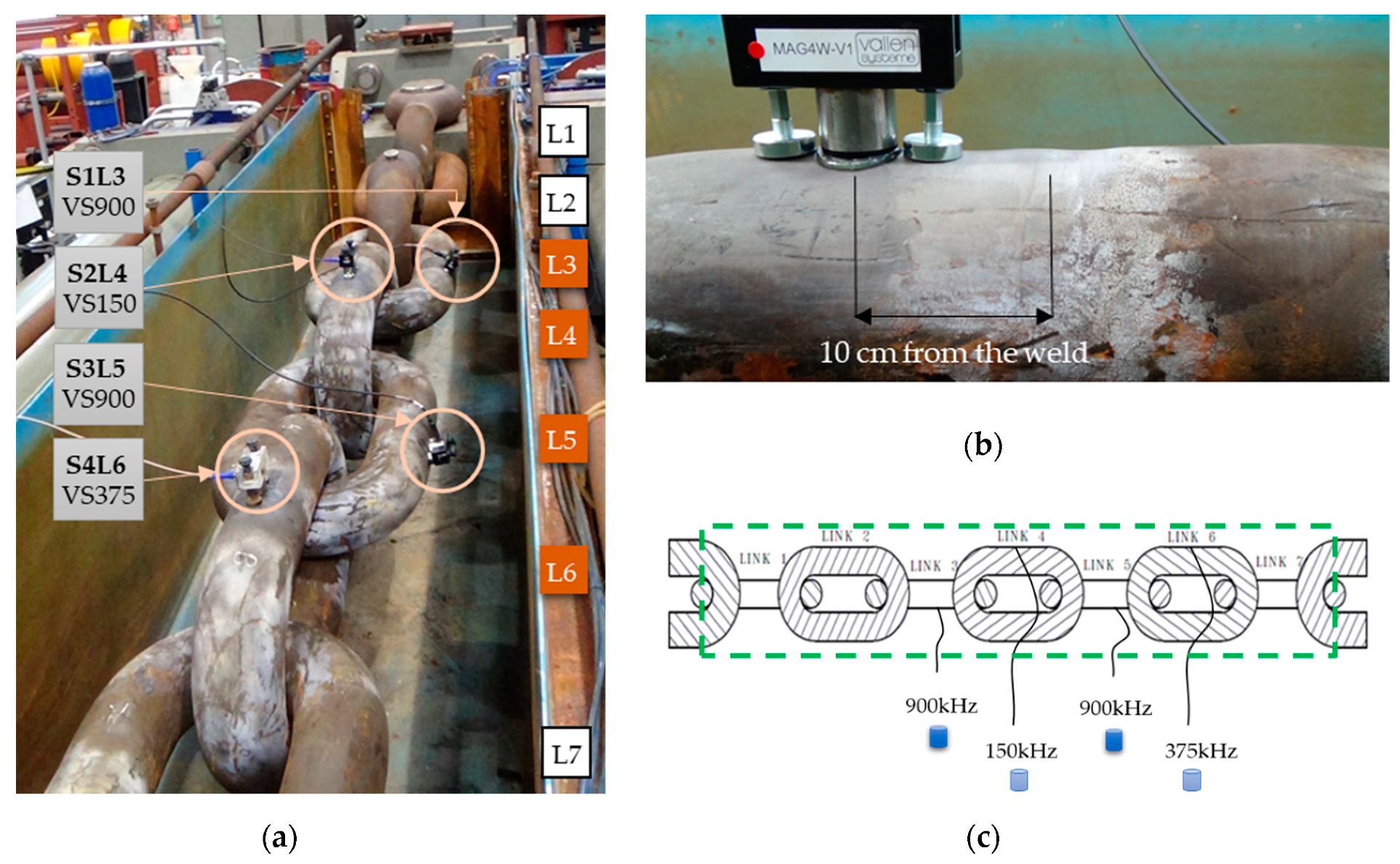
2.2. Hardware Selection and Sensor Deployment
3. Results and Discussion
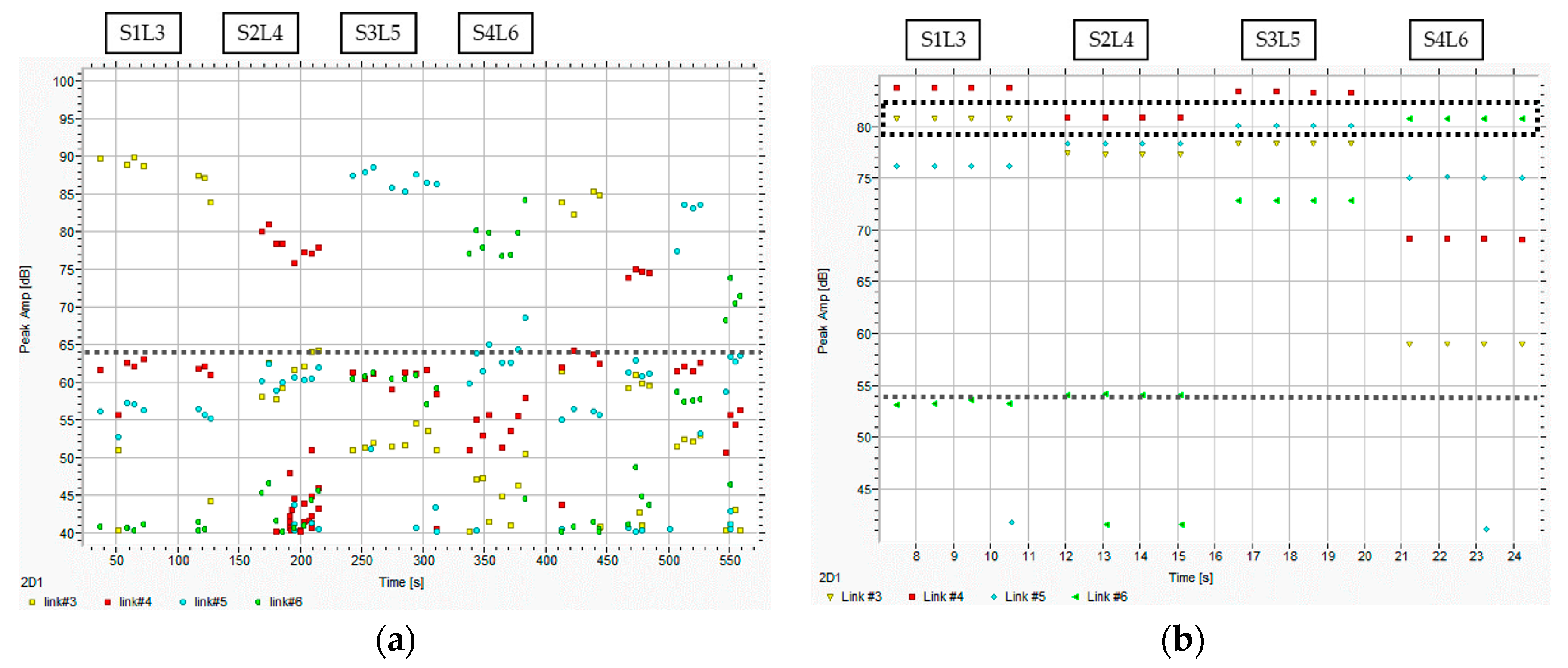
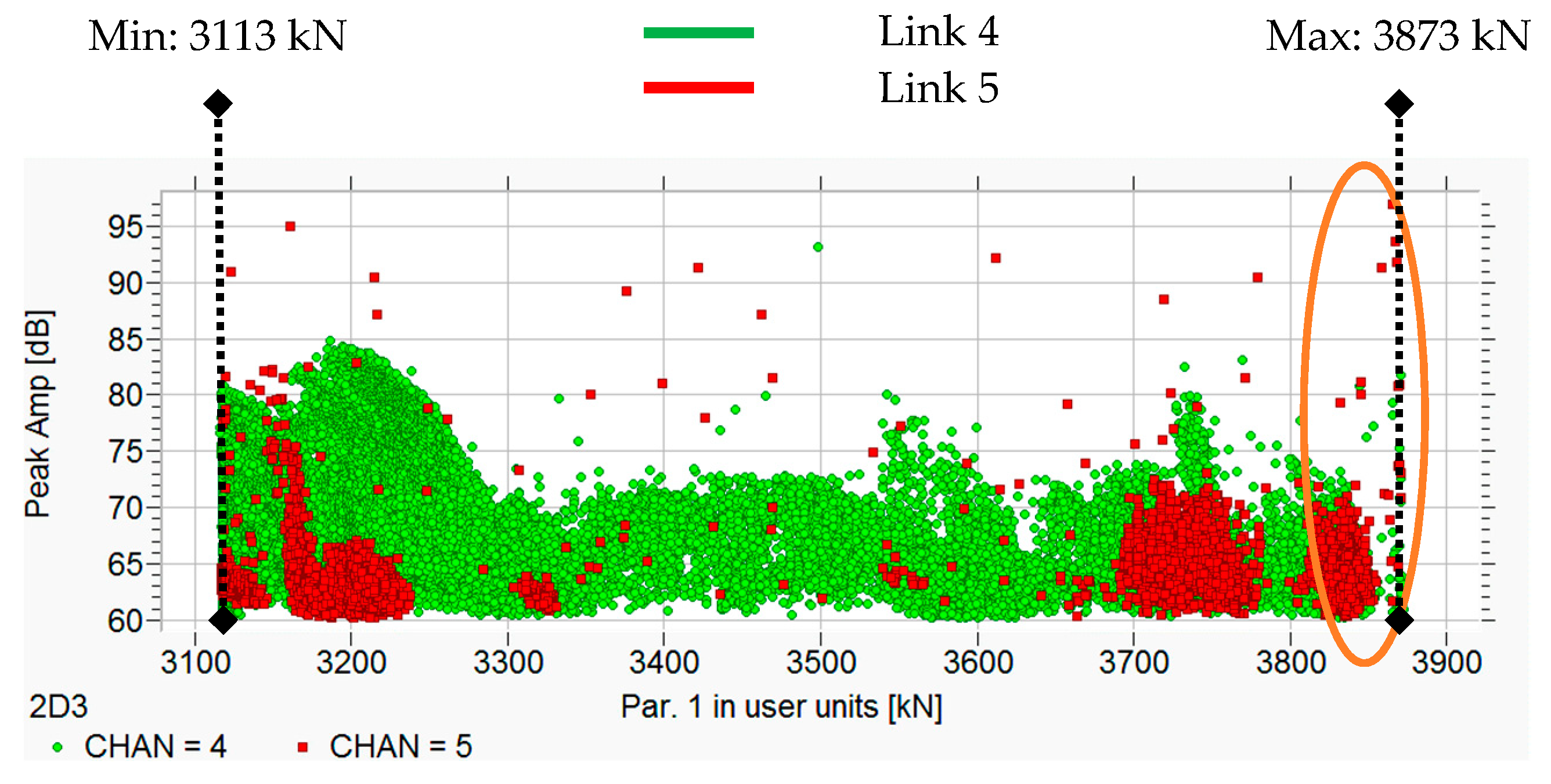
- Peak amplitude (dB) vs. load (kN): It was desirable to establish a correlation between the AE amplitude of the events detected and the loading state of the chain links;
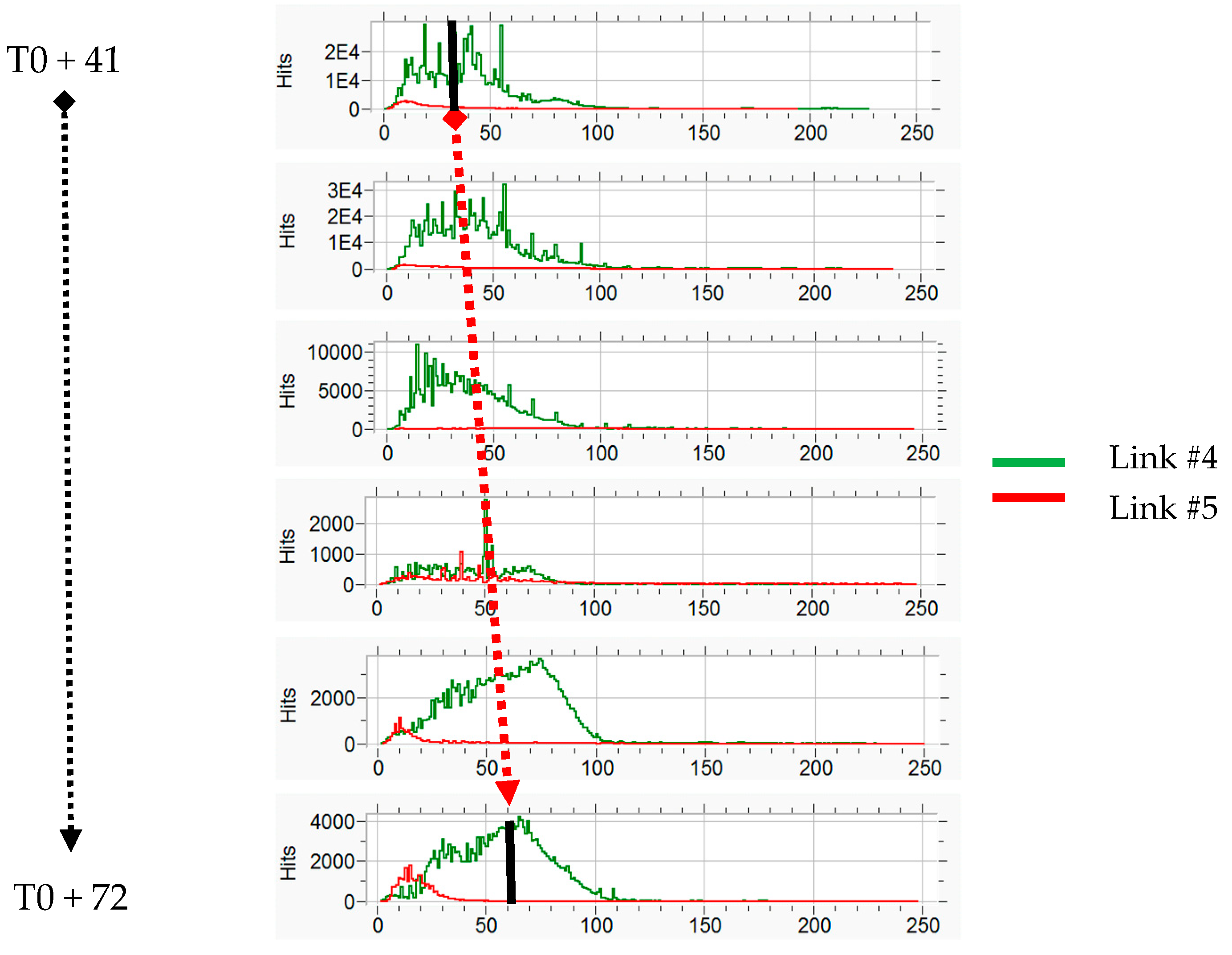
- Number of hits vs. average frequency (kHz): The frequency analysis was performed in order to measure the characteristic central frequency and characterise the damage evolution;
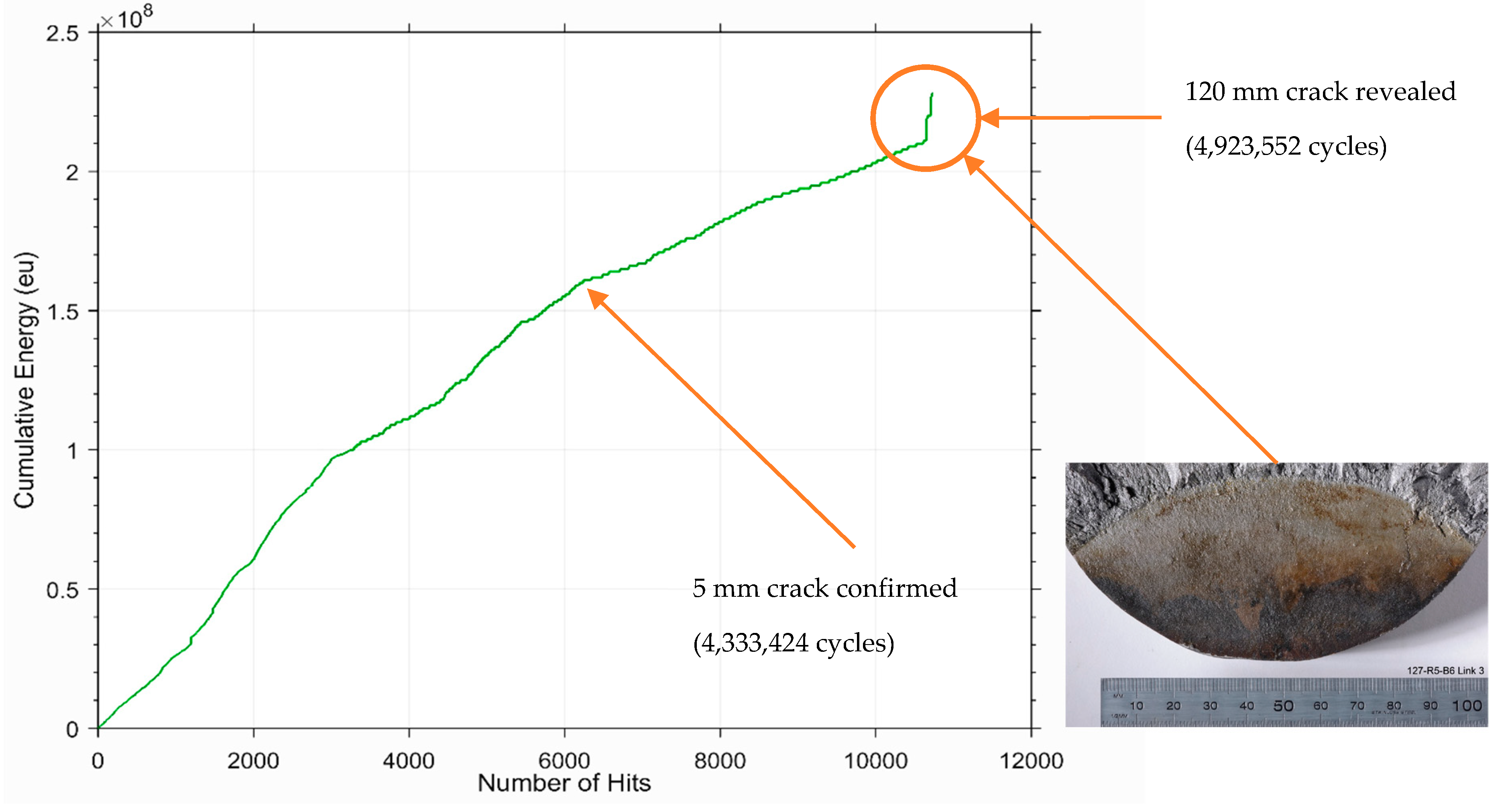
- Cumulative energy vs. number of hits: The cumulative AE energy is associated with the cumulative energy of the AE hits. An increase in the cumulative energy’s slope may be related to the evolution of the damage [38].
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Moan, T. Life cycle structural integrity management of offshore structures. Struct. Infrastruct. Eng. 2018, 14, 911–927. [Google Scholar] [CrossRef] [Green Version]
- Thorpe, T.; Scott, P.; Rance, A.; Silverster, D. Corrosion fatigue of BS 4360:50D structural steel in seawater. Int. J. Fatigue 1983, 5, 123–133. [Google Scholar] [CrossRef]
- Agerskov, H.; Pedersen, N. Fatigue life of offshore steel structures under stochastic loading. Struct. Infrastruct. Eng. 1992, 118, 2101–2117. [Google Scholar] [CrossRef]
- Alawi, H.; Ragab, A.; Shaban, M. Corrosion fatigue crack growth of steels in various environments. J. Eng. Mater. Technol. (ASME) 1989, 111, 40–45. [Google Scholar] [CrossRef]
- Komai, K.; Noguchi, M.; Okamoto, H. Growth characteristics of surface fatigue cracks of high-tensile strength steel in synthetic seawater. JSME Int. J. 1988, 31, 613–618. [Google Scholar] [CrossRef]
- Komai, K.; Minoshima, K.; Kinoshita, S.; Kim, G. Corrosion fatigue crack initiation of high-tensile-strength steels in synthetic seawater. JSME Int. J. 1988, 31, 606–612. [Google Scholar] [CrossRef]
- Monsalve-Giraldo, J.S.; Dantas, C.M.S.; Sagrilo, L.V.S. Probabilistic fatigue analysis of marine structures using the univariate dimension-reduction method. Mar. Struct. 2016, 50, 189–204. [Google Scholar] [CrossRef]
- Low, Y. A variance reduction technique for long-term fatigue analysis of offshore structures using Monte Carlo simulation. Eng. Struct. 2016, 128, 283–295. [Google Scholar] [CrossRef]
- Zhang, Y.-H.; Dore, M. Fatigue crack growth assessment using BS 7910:2013—Background andrecommended developments. Int. J. Press. Vessels Pip. 2018, 168, 79–86. [Google Scholar] [CrossRef]
- Shukla, A.; Karki, H. Application of robotics in offshore oil and gas industry—A review Part 2. Robot. Auton. Syst. 2016, 75, 508–524. [Google Scholar] [CrossRef]
- Raine, G.A.; Lugg, M.C. ROV inspection of welds—A reality. Insight Non-Destruct. Test. Cond. Monit. 1996, 38, 346–350. [Google Scholar]
- Papazian, J.M.; Nardiello, J.; Silberstein, R.P.; Welsh, G.; Grundy, C.C.D.; Evans, L.; Godfine, N.; Michaels, J.E.; Michaels, T.E.; Li, Y.; et al. Sensors for monitoring early stage fatigue cracking. Int. J. Fatigue 2007, 29, 1668–1680. [Google Scholar] [CrossRef]
- Chan, H.; Masserey, B.; Fromme, P. High frequency guided ultrasonic waves for hidden fatigue crack growth monitoring in multi-layer model aerospace structures. Smart Mater. Struct. 2015, 24, 1–10. [Google Scholar] [CrossRef]
- Cho, H.; Lissenden, C. Structural health monitoring of fatigue crack growth in plate structures with ultrasonic guided waves. Struct. Health Monit. 2012, 11, 393–404. [Google Scholar] [CrossRef]
- Kuang, K.; Cantwell, W. Use of conventional optical fibers and fiber Bragg gratings for damage detection in advanced composite structures: A review. Appl. Mech. Rev. 2003, 56, 493–513. [Google Scholar] [CrossRef]
- Bernasconi, A.; Carboni, M.; Comolli, L. Monitoring of fatigue crack growth in composite adhesively bonded joints using Fiber Bragg Gratings. Procedia Eng. 2011, 10, 207–212. [Google Scholar] [CrossRef] [Green Version]
- Silva-Munoz, R.; Lopez-Anido, R. Structural health monitoring of marine composite structural joints using embedded fiber Bragg grating strain sensors. Compos. Struct. 2009, 89, 224–234. [Google Scholar] [CrossRef]
- Deans, W.; Richards, C. A simple and sensitive method of monitoring crack and load in compact fracture mechanics specimens using strain gages. J. Test. Eval. 1979, 7, 147–154. [Google Scholar]
- Ihn, J.-B.; Chang, F.-K. Detection and monitoring of hidden fatigue crack growth using a built-in piezoelectric sensor/actuator network: I. Diagnostics. Smart Mater. Struct. 2004, 13, 609. [Google Scholar] [CrossRef]
- Fowler, T. Chemical industry application of acoustic emission. Mater. Eval. 1992, 50, 875–882. [Google Scholar]
- Gong, Z.; Nyborg, E.; Oommen, G. Acoustic emission monitoring of steel railroad bridges. Mater. Eval. 1992, 50, 883–887. [Google Scholar] [CrossRef]
- Roberts, T.; Talebzadeh, M. Acoustic emission monitoring of fatigue crack propagation. J. Constr. Steel Res. 2003, 59, 695–712. [Google Scholar] [CrossRef]
- Yu, J.; Ziehl, P.; Zarate, B.; Caicedo, J. Prediction of fatigue crack growth in steel bridge components using acoustic emission. J. Constr. Steel Res. 2011, 67, 1254–1260. [Google Scholar] [CrossRef]
- Berkovits, A.; Fang, D. Study of fatigue crack characteristics by acoustic emission. Eng. Fract. Mech. 1995, 51, 401–409. [Google Scholar] [CrossRef]
- Lindley, T.; Palmer, I.; Richards, C. Acoustic emission monitoring of fatigue crack growth. Mater. Sci. Eng. 1978, 32, 1–15. [Google Scholar] [CrossRef]
- Mathisen, J.; Larsen, K. Risk-based inspection planning for mooring chain. J. Offshore Mech. Arct. Eng. (Trans. ASME) 2004, 126, 250–257. [Google Scholar] [CrossRef]
- Cheng, X.; Zhang, X.; Zhang, H. The influence of hydrogen on deformation under the elastic stress in mooring chain steel. Mater. Sci. Eng. A 2018, 730, 295–302. [Google Scholar] [CrossRef]
- Cheng, X.; Zhang, H.; Li, H.; Shen, H. Effect of tempering temperature on the microstructure and mechanical properties in mooring chain steel. Mater. Sci. Eng. 2015, 636, 164–171. [Google Scholar] [CrossRef]
- Cheng, Y.; Ji, C.; Zhai, G.; Oleg, G. Nonlinear analysis for ship-generated waves interaction with mooring line/riser systems. Mar. Struct. 2018, 59, 1–24. [Google Scholar] [CrossRef]
- Rivera, F.G.; Edwards, G.; Eren, E.; Soua, S. Acoustic emission technique to monitor crack growth in a mooring chain. Appl. Acoust. 2018, 139, 156–164. [Google Scholar] [CrossRef]
- Angulo, A.; Edwards, G.; Soua, S.; Gan, T.-H. Mooring integrity management: Novel approaches towards in situ monitoring. In Structural Health Monitoring-Measurement Methods and Practical Applications; Intechopen: London, UK, 2017. [Google Scholar]
- Angulo, Á.; Allwright, J.; Mares, C.; Gan, T.H.; Soua, S. Finite element analysis of crack growth for structural health monitoring of mooring chains using ultrasonic guided waves and acoustic emission. Procedia Struct. Integr. 2017, 5, 217–224. [Google Scholar] [CrossRef]
- Bastid, P.; Smith, S. Numerical analysis of contact stresses between mooring chain links and potential consequences for fatigue damage. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering Volume 2B: Structures, Safety and Reliability, Nantes, France, 9–14 June 2013. [Google Scholar]
- Perez, I.; Bastid, P.; Venugopal, V. Prediction of residual stresses in mooring chains and its impact on fatigue life. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering Volume 3A: Structures, Safety and Reliability, Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- ASTM E1106-12(2017). Standard Test Method for Primary Calibration of Acoustic Emission Sensors; ASTM Volume 03.03 Nondestructive Testing (I): C1331–E2373; ASTM International: West Conshohocken, PA, USA, 2018. [Google Scholar]
- ASTM E976-15. Standard Guide for Determining the Reproducibility of Acoustic Emission Sensor Response; ASTM Volume 03.03 Nondestructive Testing (I): C1331–E2373; ASTM International: West Conshohocken, PA, USA, 2018. [Google Scholar]
- Hsu, N.; Breckenridge, F. Characterization and calibration of acoustic emission sensors. Mater. Eval. 1981, 39, 60–68. [Google Scholar]
- Bourchak, M.; Farrow, I.; Bond, I.; Rowland, C.; Menan, F. Acoustic emission energy as a fatigue damage parameter for CFRP composite. Int. J. Fatigue 2007, 29, 457–470. [Google Scholar] [CrossRef]
- Bhuiyan, M.; Giurgiutiu, V. The signature of acoustic emission waveforms from fatigu crack advancing in thin metallic plates. Smart Mater. Struct. 2018, 27, 1–15. [Google Scholar] [CrossRef]
- Kawasaki, Y.; Wakuda, T.; Kobarai, T.; Ohtsu, M. Corrosion mechanisms in reinforced concrete by acoustic emission. Constr. Build. Mater. 2013, 48, 1240–1247. [Google Scholar] [CrossRef]
- Tomoda, Y.; Mori, K.; Kawasaki, Y.; Ohtsu, M. Monitoring corrosion-induced cracks in concrete by acoustic emission. In Proceedings of the 7th International Conference on Fracture Mechanics of Concrete and Concrete Structures, Seoul, Korea, 23–28 May 2010; Korea Concrete Institute: Seoul, Korea, 2010; ISBN 978-89-5708-181-5. [Google Scholar]
- Groot, P.D.; Wijnen, P.; Janssen, R. Real-time frequency determination of acoustic emission for different fracture mechanism in carbon/epoxy composites. Compos. Sci. Technol. 1995, 55, 405–412. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pencil Lead Break | Sensor Pulsing |
|---|---|
|
|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Angulo, Á.; Tang, J.; Khadimallah, A.; Soua, S.; Mares, C.; Gan, T.-H. Acoustic Emission Monitoring of Fatigue Crack Growth in Mooring Chains. Appl. Sci. 2019, 9, 2187. https://doi.org/10.3390/app9112187
Angulo Á, Tang J, Khadimallah A, Soua S, Mares C, Gan T-H. Acoustic Emission Monitoring of Fatigue Crack Growth in Mooring Chains. Applied Sciences. 2019; 9(11):2187. https://doi.org/10.3390/app9112187
Chicago/Turabian StyleAngulo, Ángela, Jialin Tang, Ali Khadimallah, Slim Soua, Cristinel Mares, and Tat-Hean Gan. 2019. "Acoustic Emission Monitoring of Fatigue Crack Growth in Mooring Chains" Applied Sciences 9, no. 11: 2187. https://doi.org/10.3390/app9112187
APA StyleAngulo, Á., Tang, J., Khadimallah, A., Soua, S., Mares, C., & Gan, T.-H. (2019). Acoustic Emission Monitoring of Fatigue Crack Growth in Mooring Chains. Applied Sciences, 9(11), 2187. https://doi.org/10.3390/app9112187