Aerial Grasping of an Object in the Strong Wind: Robust Control of an Aerial Manipulator

 ,
,
Abstract
:1. Introduction
- An acceleration feedback enhanced robust H∞ controller of UAV was designed, which can give the aerial manipulator the ability to reject the wind disturbance. The proof of bounded input bounded output) stability of the UAV under the H∞ controller is also presented.
- Successful grasping of an object using an aerial manipulator in a strong wind was performed. To the best of our knowledge, this is the first time an aerial manipulator system has completed this task in strong wind.
2. System Model
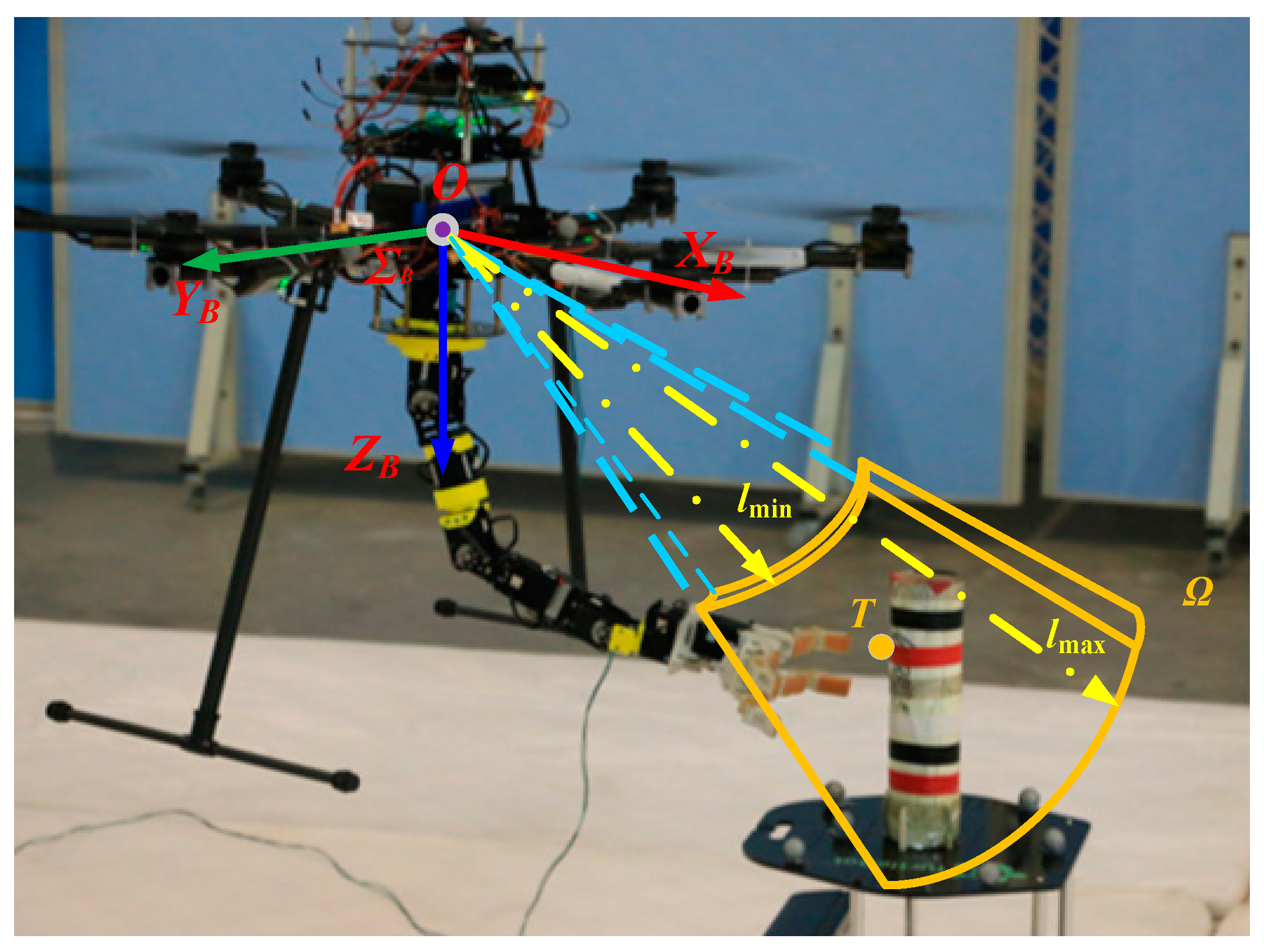
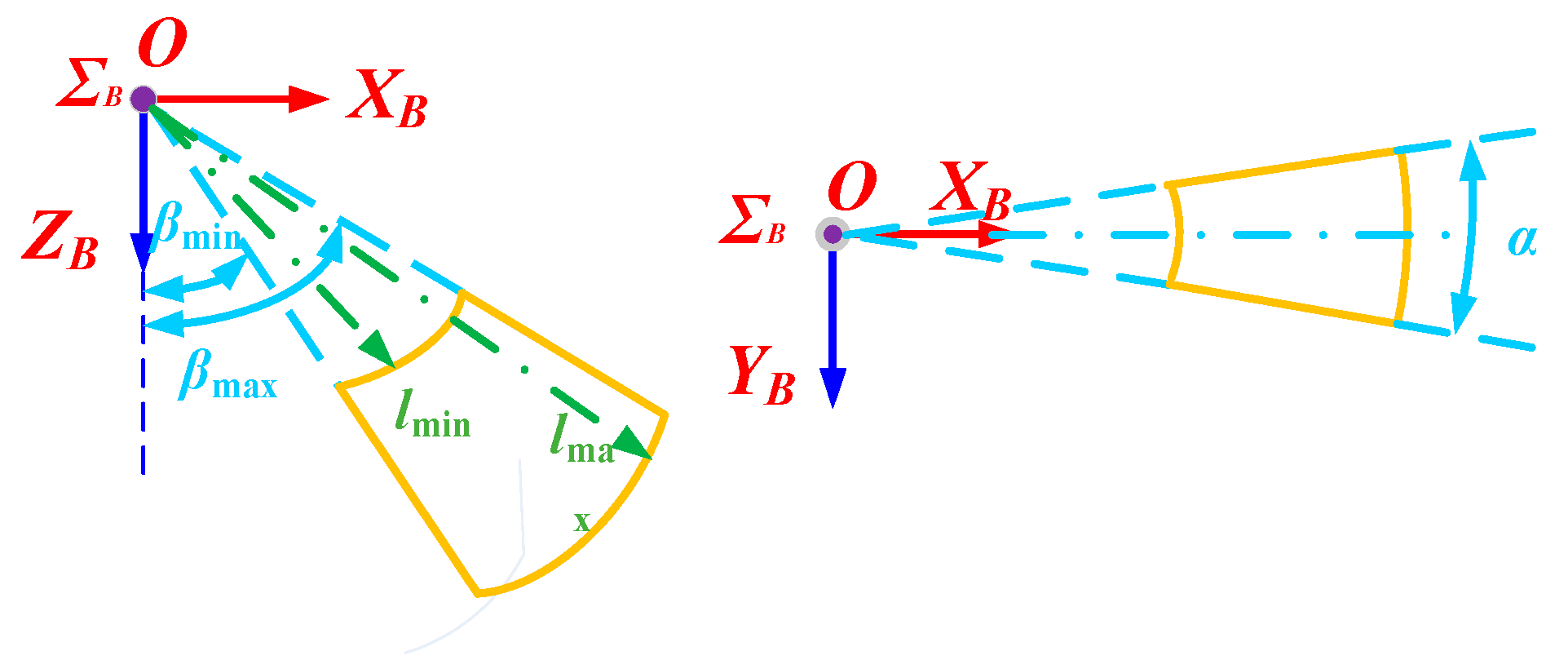
2.1. System Kinematics
2.2. Dynamic of the UAV
3. System Control
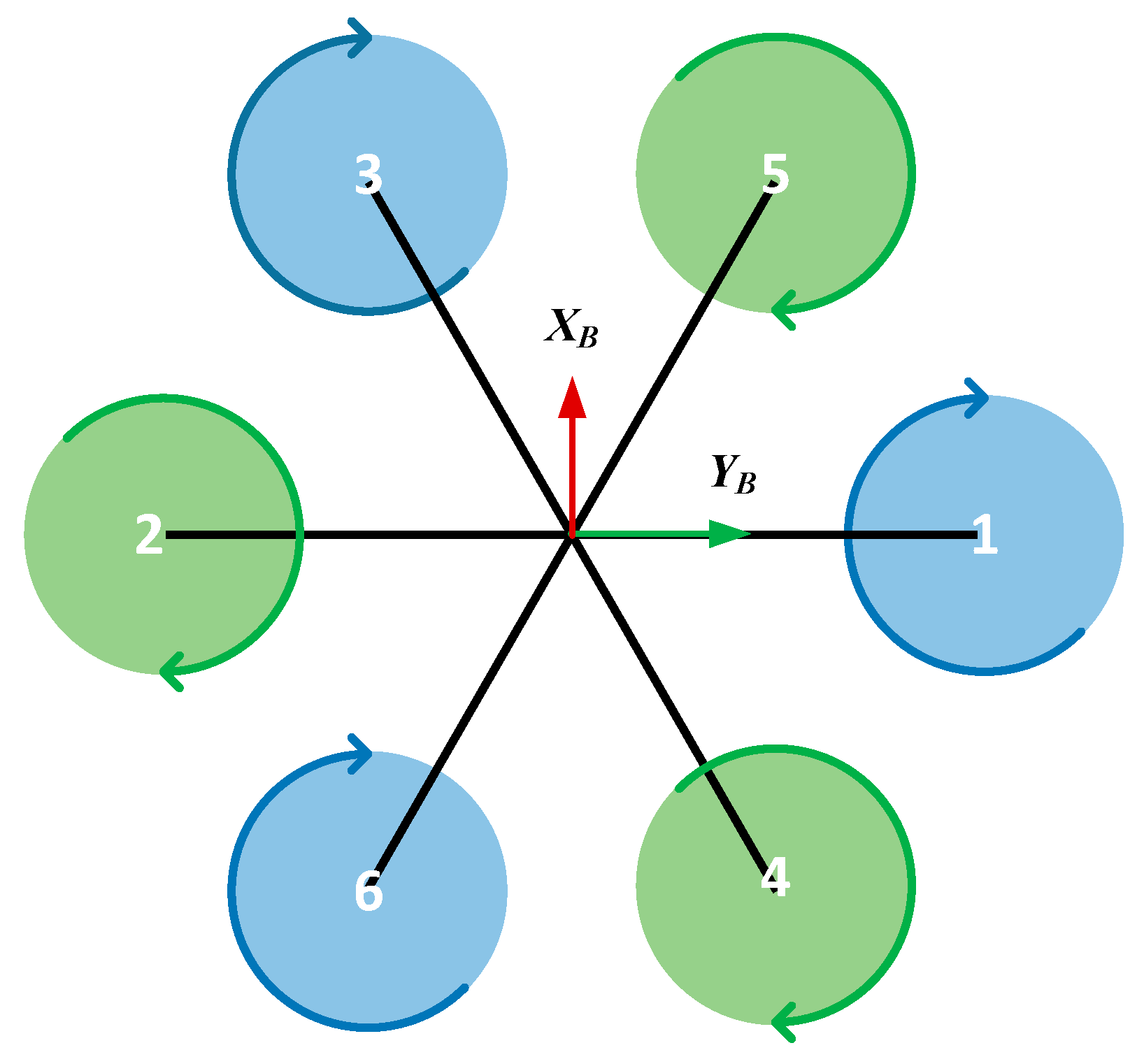
3.1. Hex-rotor Control
3.1.1. Translational and Rotational Dynamic Decoupling
3.1.2. H∞ Controller
3.2. Acceleration Feedback Enhanced
3.3. Manipulator Control
4. Experiments and Results
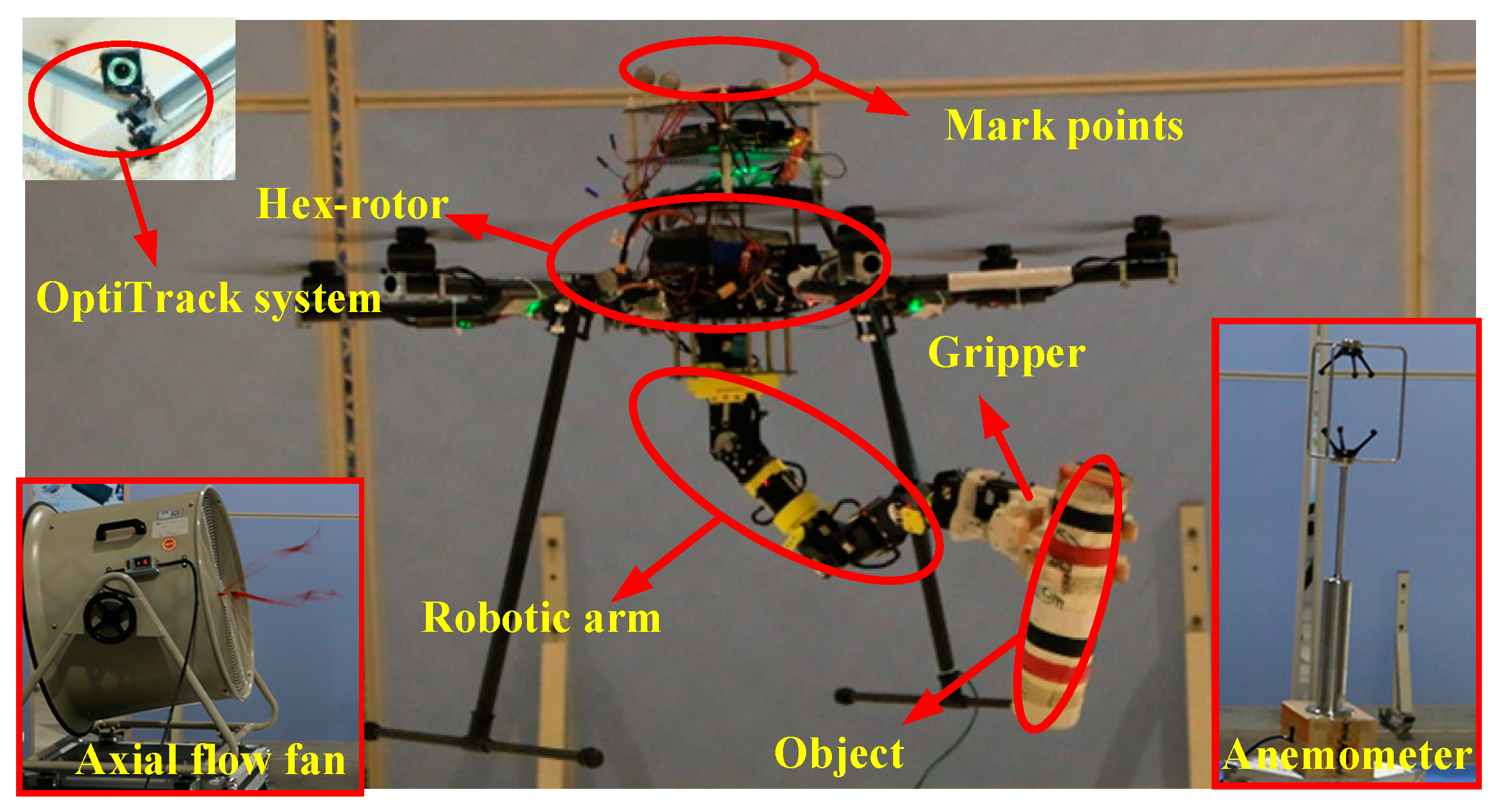
4.1. Experimental Platform
4.2. Aerial Grasping in the Wind
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Bonyan Khamseh, H.; Janabi-Sharifi, F.; Abdessameud, A. Aerial manipulation—A literature survey. Robot. Auton. Syst. 2018, 107, 221–235. [Google Scholar] [CrossRef]
- Ruggiero, F.; Lippiello, V.; Ollero, A. Aerial manipulation: A literature review. IEEE Robot. Autom. Lett. 2018, 3, 1957–1964. [Google Scholar] [CrossRef]
- Mellinger, D.; Lindsey, Q.; Shomin, M.; Kumar, V. Design, modeling, estimation and control for aerial grasping and manipulation. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2668–2673. [Google Scholar]
- Pounds, P.E.I.; Bersak, D.R.; Dollar, A.M. Grasping from the air: Hovering capture and load stability. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2491–2498. [Google Scholar]
- Kutia, J.R.; Stol, K.A.; Xu, W. Canopy sampling using an aerial manipulator: A preliminary study. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 477–484. [Google Scholar]
- Korpela, C.; Orsag, M.; Oh, P. Towards valve turning using a dual-arm aerial manipulator. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3411–3416. [Google Scholar]
- Staub, N.; Bicego, D.; Sablé, Q.; Arellano, V.; Mishra, S.; Franchi, A. Towards a flying assistant paradigm: The OTHex. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6997–7002. [Google Scholar]
- Zhang, G.; He, Y.; Dai, B.; Gu, F.; Yang, L.; Han, J.; Liu, G. Grasp a moving target from the air: System & control of an aerial manipulator. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1681–1687. [Google Scholar]
- AEROARMS. Available online: https://aeroarms-project.eu/ (accessed on 23 February 2019).
- Collaborative Aerial Workers. Available online: http://www.aeroworks2020.eu/ (accessed on 23 February 2019).
- Caccavale, F.; Giglio, G.; Muscio, G.; Pierri, F. Adaptive control for UAVs equipped with a robotic arm. IFAC Proc. Vol. 2014, 47, 11049–11054. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Kim, H.J. Estimation, control, and planning for autonomous aerial transportation. IEEE Trans. Ind. Electron. 2017, 64, 3369–3379. [Google Scholar] [CrossRef]
- Pierri, F.; Muscio, G.; Caccavale, F. An adaptive hierarchical control for aerial manipulators. Robotica 2018, 36, 1527–1550. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Lee, D. Dynamics and control of quadrotor with robotic manipulator. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5544–5549. [Google Scholar]
- Kobilarov, M. Nonlinear trajectory control of multi-body aerial manipulators. J. Intell. Robot. Syst. 2014, 73, 679–692. [Google Scholar] [CrossRef]
- Seo, H.; Kim, S.; Kim, H.J. Aerial grasping of cylindrical object using visual servoing based on stochastic model predictive control. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6362–6368. [Google Scholar]
- Garimella, G.; Kobilarov, M. Towards model-predictive control for aerial pick-and-place. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4692–4697. [Google Scholar]
- Lunni, D.; Santamaria-Navarro, A.; Rossi, R.; Rocco, P.; Bascetta, L.; Andrade-Cetto, J. Nonlinear model predictive control for aerial manipulation. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 87–93. [Google Scholar]
- Lippiello, V.; Ruggiero, F. Cartesian Impedance Control of a UAV with a Robotic Arm. IFAC Proc. Vol. 2012, 45, 704–709. [Google Scholar] [CrossRef] [Green Version]
- Huber, F.; Kondak, K.; Krieger, K.; Sommer, D.; Schwarzbach, M.; Laiacker, M.; Kossyk, I.; Parusel, S.; Haddadin, S.; Albu-Schäffer, A. First analysis and experiments in aerial manipulation using fully actuated redundant robot arm. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3452–3457. [Google Scholar]
- Waslander, S.; Wang, C. Wind disturbance estimation and rejection for quadrotor position control. In Proceedings of the AIAA Infotech@Aerospace Conference, Seattle, WA, USA, 6–9 April 2009; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2009. [Google Scholar]
- Shi, D.; Wu, Z.; Chou, W. Generalized extended state observer based high precision attitude control of quadrotor vehicles subject to wind disturbance. IEEE Access 2018, 6, 32349–32359. [Google Scholar] [CrossRef]
- Lee, S.J.; Kim, S.; Johansson, K.H.; Kim, H.J. Robust acceleration control of a hexarotor UAV with a disturbance observer. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 4166–4171. [Google Scholar]
- Tomić, T. Evaluation of acceleration-based disturbance observation for multicopter control. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 2937–2944. [Google Scholar]
- He, Y.Q.; Han, J.D. Acceleration-feedback-enhanced robust control of an unmanned helicopter. J. Guid. Control. Dyn. 2010, 33, 1236–1250. [Google Scholar] [CrossRef]
- Spong, M.W. Robot Dynamics and Control, 1st ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1989; ISBN 978-0-471-61243-8. [Google Scholar]
- Jimenez-Cano, A.; Heredia, G.; Bejar, M.; Kondak, K.; Ollero, A. Modelling and control of an aerial manipulator consisting of an autonomous helicopter equipped with a multi-link robotic arm. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 1860–1870. [Google Scholar] [CrossRef]
- Kemper, M.; Fatikow, S. Impact of center of gravity in quadrotor helicopter controller design. IFAC Proc. Vol. 2006, 39, 157–162. [Google Scholar] [CrossRef]
- Fantoni, I.; Lozano, R.; Kendoul, F. Asymptotic stability of hierarchical inner-outer loop-based flight controllers. IFAC Proc. Vol. 2008, 41, 1741–1746. [Google Scholar] [CrossRef]
- Alberto, I. Nonlinear Control Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Roy, S.; Roy, S.B.; Kar, I.N. Adaptive–robust control of euler–lagrange systems with linearly parametrizable uncertainty bound. IEEE Trans. Control. Syst. Technol. 2018, 26, 1842–1850. [Google Scholar] [CrossRef]
- Roy, S.; Roy, S.B.; Kar, I.N. A new design methodology of adaptive sliding mode control for a class of nonlinear systems with state dependent uncertainty bound. In Proceedings of the 2018 15th International Workshop on Variable Structure Systems (VSS), Graz, Austria, 9–11 July 2018; pp. 414–419. [Google Scholar]
- Roy, S.; Lee, J.; Baldi, S. A new continuous-time stability perspective of time-delay control: Introducing a state-dependent upper bound structure. IEEE Control. Syst. Lett. 2019, 3, 475–480. [Google Scholar] [CrossRef]
- Jianda, H.; Yuqing, H.; Weiliang, X. Angular acceleration estimation and feedback control: An experimental investigation. Mechatronics 2007, 17, 524–532. [Google Scholar] [Green Version]
- English, J.D.; Maciejewski, A.A. On the implementation of velocity control for kinematically redundant manipulators. IEEE Trans. Syst. Man Cybern. Part. Syst. Hum. 2000, 30, 233–237. [Google Scholar] [CrossRef]
- Yale OpenHand Project. Available online: https://www.eng.yale.edu/grablab/openhand/ (accessed on 12 February 2019).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Hex-rotor mass | 3 kg |
| Maximum takeoff weight of the hex-rotor | 5.5 kg |
| Hex-rotor diagonal size | 80 cm |
| Flight time | 15 min |
| Arm mass (including gripper) | 1.5 kg |
| Arm length | 53.4 cm |
| Maximum opening of gripper | 12 cm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; He, Y.; Dai, B.; Gu, F.; Yang, L.; Han, J.; Liu, G. Aerial Grasping of an Object in the Strong Wind: Robust Control of an Aerial Manipulator. Appl. Sci. 2019, 9, 2230. https://doi.org/10.3390/app9112230
Zhang G, He Y, Dai B, Gu F, Yang L, Han J, Liu G. Aerial Grasping of an Object in the Strong Wind: Robust Control of an Aerial Manipulator. Applied Sciences. 2019; 9(11):2230. https://doi.org/10.3390/app9112230
Chicago/Turabian StyleZhang, Guangyu, Yuqing He, Bo Dai, Feng Gu, Liying Yang, Jianda Han, and Guangjun Liu. 2019. "Aerial Grasping of an Object in the Strong Wind: Robust Control of an Aerial Manipulator" Applied Sciences 9, no. 11: 2230. https://doi.org/10.3390/app9112230
APA StyleZhang, G., He, Y., Dai, B., Gu, F., Yang, L., Han, J., & Liu, G. (2019). Aerial Grasping of an Object in the Strong Wind: Robust Control of an Aerial Manipulator. Applied Sciences, 9(11), 2230. https://doi.org/10.3390/app9112230