Discrete and Phase Field Methods for Linear Elastic Fracture Mechanics: A Comparative Study and State-of-the-Art Review

 ,
,  ,
, 
Abstract
:1. Introduction
- A conforming mesh topology is required to represent the associated crack.
- The typical polynomial-based interpolation functions cannot reproduce the singular stress field.
- Tracking crack paths and incorporating branching and merging behaviour is algorithmically challenging.
- Mesh dependant projection errors arise within the context of nonlinear and dynamic analyses.
- Nucleation, branching and merging of cracks cannot be treated in a uniform and theoretically sound manner.
- Calculation of the stress intensity factors (SIFs) requires additional post-processing methods.
2. LEFM Problem Statement
3. The Extended/Generalized Finite Element Methods (XFEM/GFEM)
3.1. Partition of Unity Enrichment
3.2. XFEM/GFEM Enrichment Functions for LEFM
3.2.1. Jump Enrichment
3.2.2. Tip Enrichment
3.2.3. Kronecker Delta Property
3.2.4. Blending
3.2.5. Ill-Conditioning
3.3. Displacement Approximation
- is the set of all nodes in the FE mesh.
- is the set of jump enriched nodes. This nodal set includes all nodes whose support is split in two by the crack.
- is the set of tip enriched nodes. This nodal set includes all nodes whose support includes the crack front.
3.4. Weak Form and Discretised Equilibrium Equations
3.5. Crack Representation
3.5.1. The Level Set Method
- The normal level set , defined as the signed distance from the crack surface.
- The tangent level set , defined as the signed distance from a surface that is normal to the crack surface and intersects the crack surface at the crack tip/front.
3.5.2. Hybrid Implicit/Explicit Methods
3.6. Numerical Integration
3.7. Crack Propagation
3.7.1. Stress Intensity Factors
3.7.2. Determination of the Crack Propagation Increment
3.8. Applications in Fracture Mechanics and Extensions
4. The Scaled Boundary Finite Element Method (SBFEM)
4.1. An Abridged Literature Review of Advancements in SBFEM Fracture Modeling
4.2. Principles of the Scaled Boundary Finite Element Method
4.3. Calculation of SIFs
Enhancing SIFs
4.4. Balanced Hybrid-Polygon Quadtrees
Crack Propagation
5. Phase Field Methods
5.1. Overview
5.2. PFM Variational Formulation
5.2.1. Second-Order Quadratic Approximation
5.2.2. Fourth-Order Quadratic Approximation
5.2.3. Linear Approximation
5.3. Material Degradation
5.4. PFM Strong Form
5.5. Derivation of the Phase Field Evolution Equation in Borden et al. from the General Form
5.6. Derivation of the Cohesive Phase Field Evolution Equation in Geelen et al. from the General Form
5.7. Irreversibility Conditions
5.8. Effective Critical Energy Release-Rate
5.9. Galerkin Approximation
6. Numerical Examples
6.1. Implemented Variants
6.2. Numerical Example 1: Single Edge-Notched Tension Test
6.3. Numerical Example 2: Single Edge-Notched Shear Test
6.4. Numerical Example 3: Notched Plate with Hole (NPwH)
6.5. Numerical Example 4: L-Shaped Panel (LSP) Test with Crack at Re-Entrant Corner
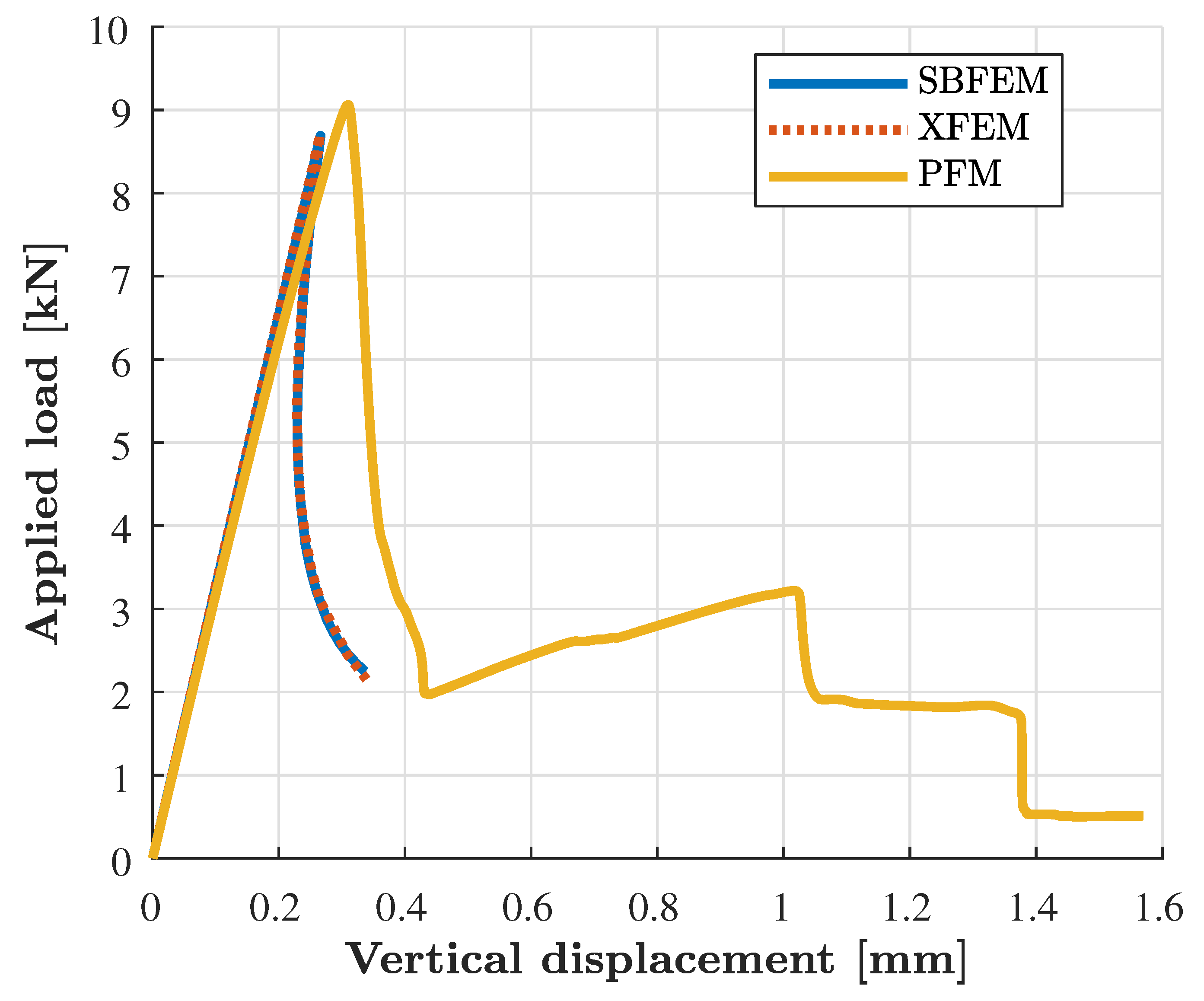
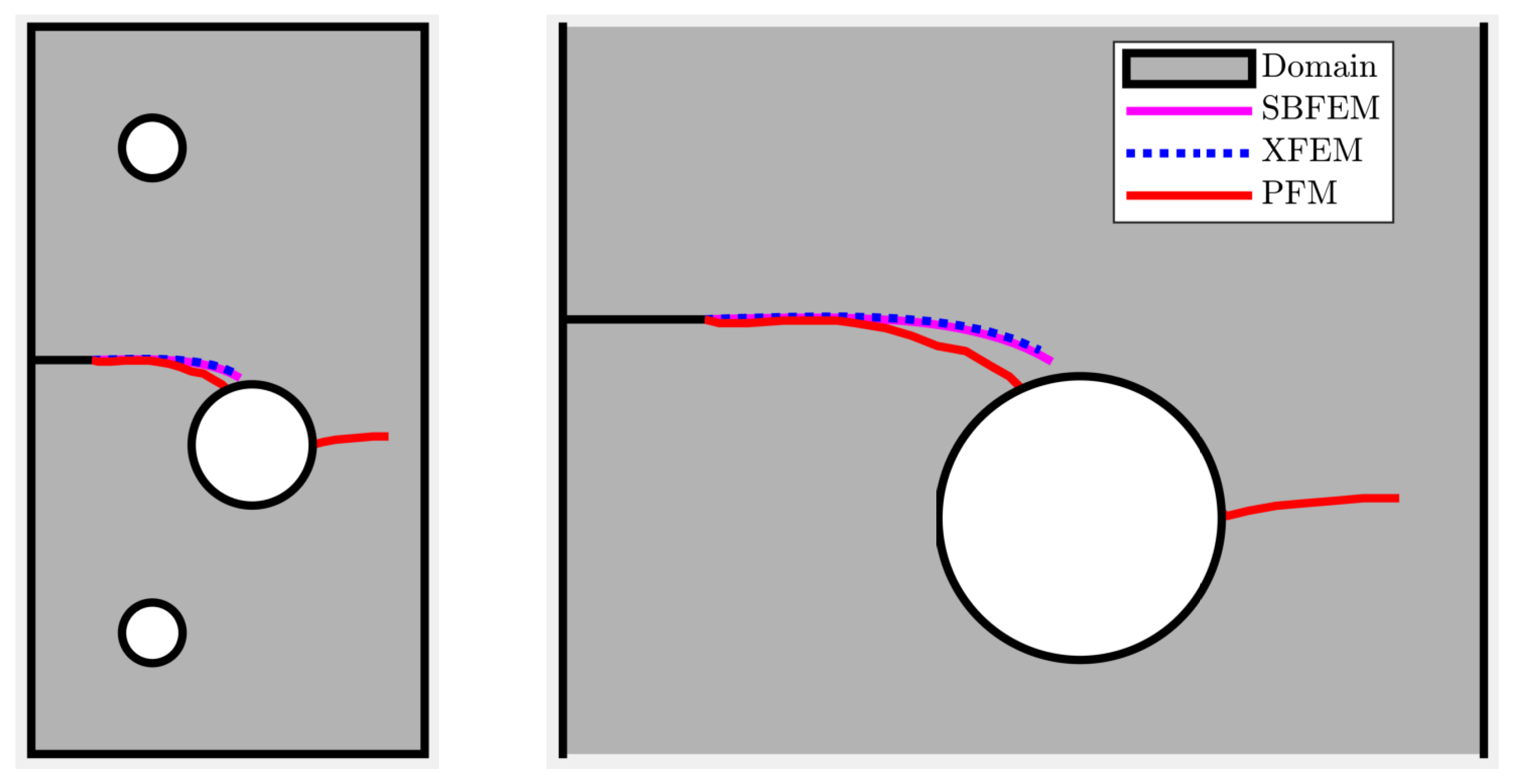
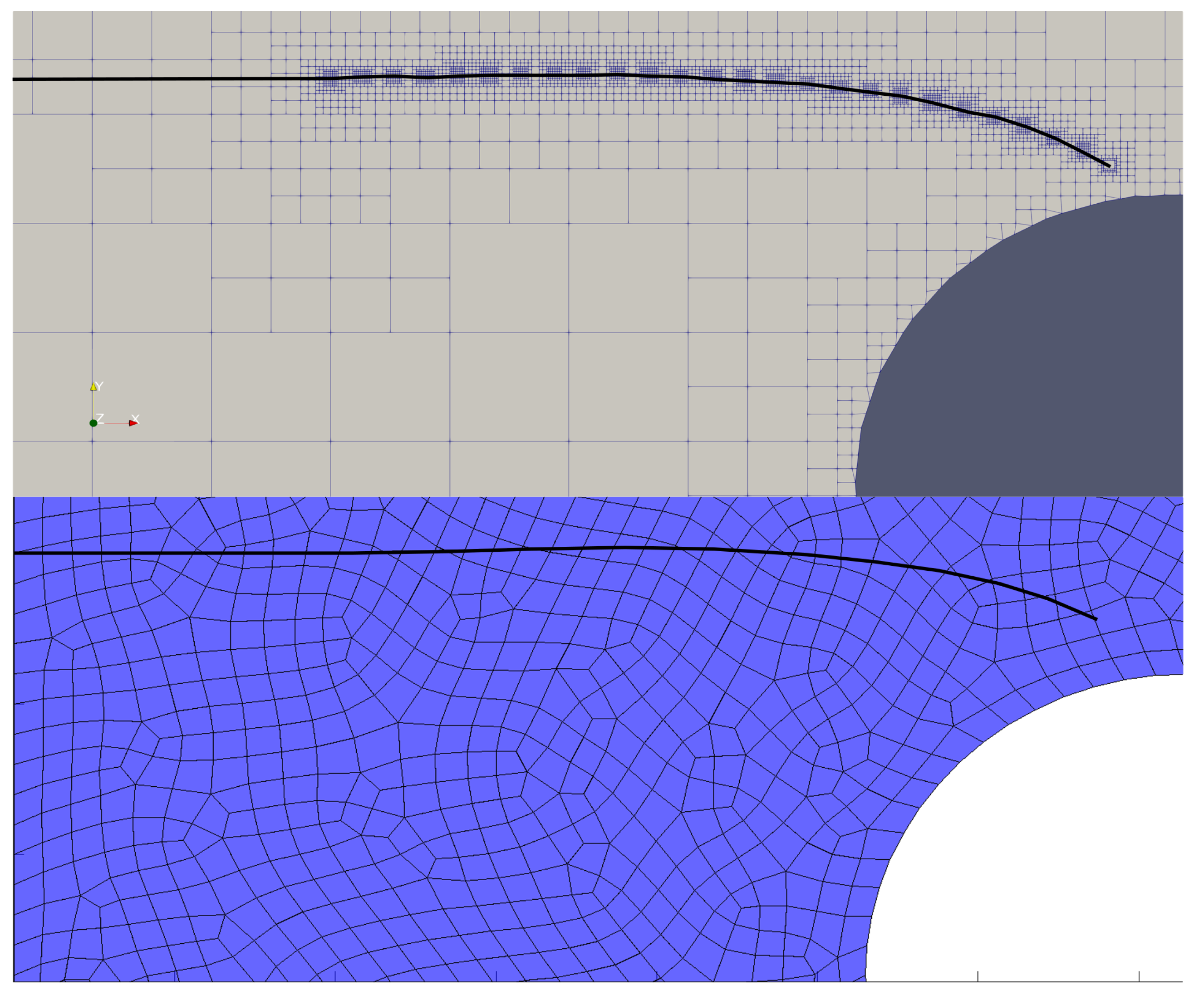
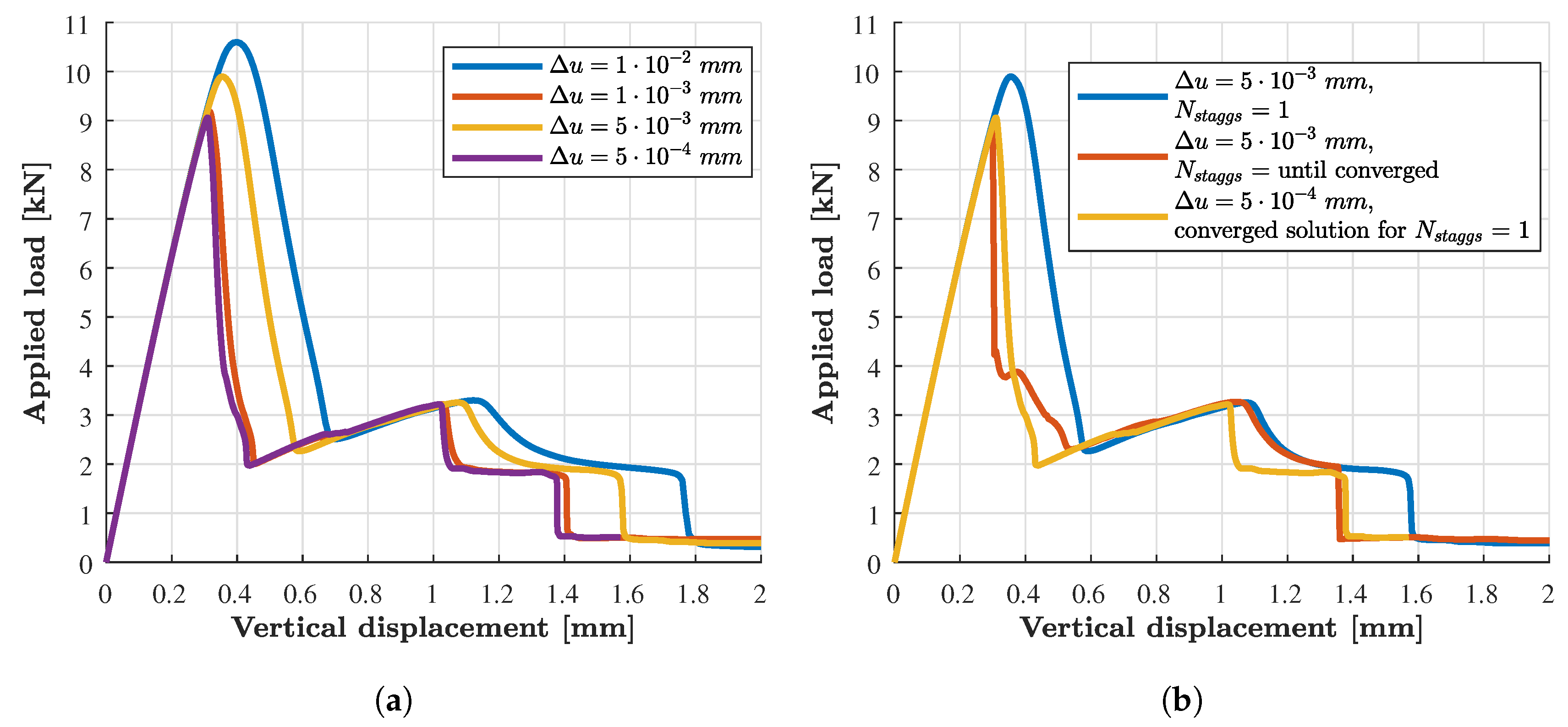
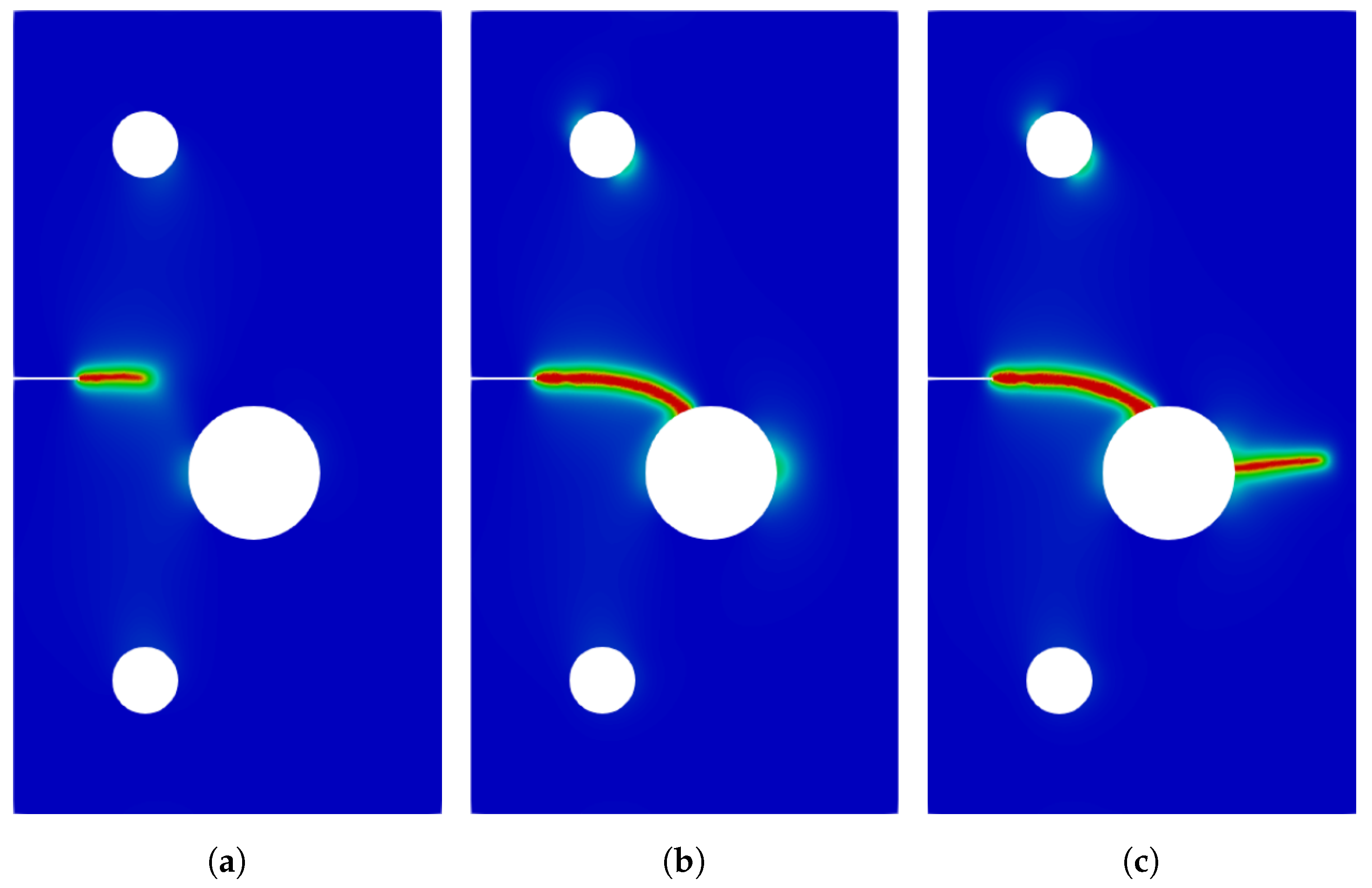
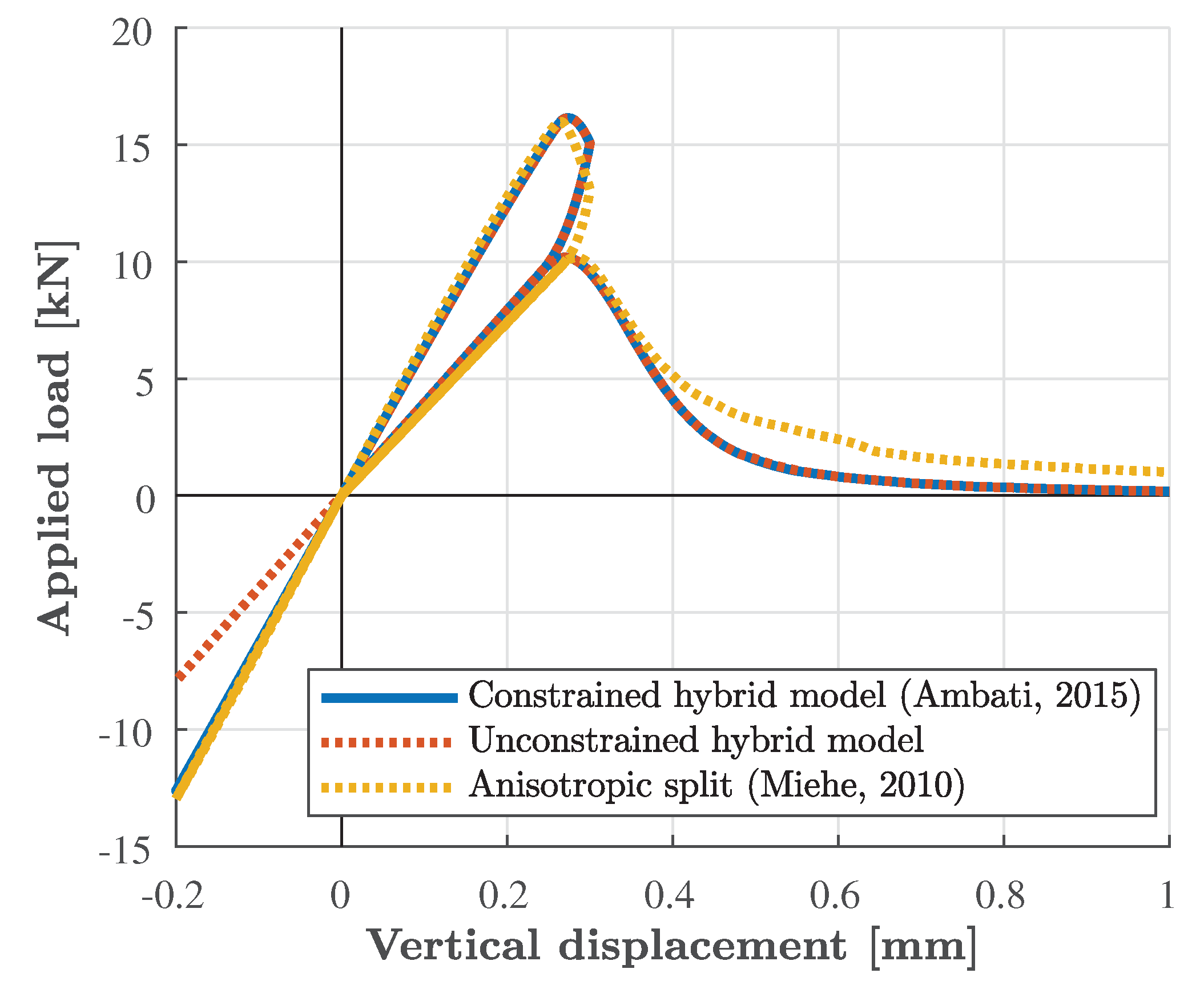
6.6. Numerical Example 5: Plate with Two Holes and Edge Cracks (PwHC)
7. Discussion and Conclusions
7.1. Crack Propagation by XFEM/GFEM
7.2. Crack Propagation by SBFEM
7.3. Crack Propagation by PFM
7.4. Contrasting Discrete and PFM Crack Representation Approaches
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zheng, J.; Liu, P. Elasto-plastic stress analysis and burst strength evaluation of Al-carbon fiber/epoxy composite cylindrical laminates. Comput. Mater. Sci. 2008, 42, 453–461. [Google Scholar] [CrossRef]
- Xu, P.; Zheng, J.; Liu, P. Finite element analysis of burst pressure of composite hydrogen storage vessels. Mater. Des. 2009, 30, 2295–2301. [Google Scholar] [CrossRef]
- Liu, P.; Zheng, J. Recent developments on damage modeling and finite element analysis for composite laminates: A review. Mater. Des. 2010, 31, 3825–3834. [Google Scholar] [CrossRef]
- Ravi-Chandar, K.; Knauss, W. An experimental investigation into dynamic fracture: III. On steady-state crack propagation and crack branching. Int. J. Fract. 1984, 26, 141–154. [Google Scholar] [CrossRef]
- Ravi-Chandar, K. Dynamic fracture of nominally brittle materials. Int. J. Fract. 1998, 90, 83–102. [Google Scholar] [CrossRef]
- Anderson, T.L. Fracture Mechanics: Fundamentals and Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Murakami, S. Continuum Damage Mechanics: A Continuum Mechanics Approach to the Analysis of Damage and Fracture; Springer Science & Business Media: Berlin, Germany, 2012; Volume 185. [Google Scholar]
- Bittencourt, T.; Wawrzynek, P.; Ingraffea, A.; Sousa, J. Quasi-automatic simulation of crack propagation for 2D LEFM problems. Eng. Fract. Mech. 1996, 55, 321–334. [Google Scholar] [CrossRef]
- Bouchard, P.; Bay, F.; Chastel, Y. Numerical modelling of crack propagation: Automatic remeshing and comparison of different criteria. Comput. Methods Appl. Mech. Eng. 2003, 192, 3887–3908. [Google Scholar] [CrossRef]
- Azócar, D.; Elgueta, M.; Rivara, M.C. Automatic LEFM crack propagation method based on local Lepp–Delaunay mesh refinement. Adv. Eng. Softw. 2010, 41, 111–119. [Google Scholar] [CrossRef]
- Kirk, B.S.; Peterson, J.W.; Stogner, R.H.; Carey, G.F. libMesh: A C++ library for parallel adaptive mesh refinement/coarsening simulations. Eng. Comput. 2006, 22, 237–254. [Google Scholar] [CrossRef]
- Geuzaine, C.; Remacle, J.F. Gmsh: A 3-D finite element mesh generator with built-in pre- and post-processing facilities. Int. J. Numer. Methods Eng. 2009, 79, 1309–1331. [Google Scholar] [CrossRef]
- Barsoum, R. On the use of isoparametric finite elements in linear fracture mechanics. Int. J. Numer. Methods Eng. 1976, 10, 25–37. [Google Scholar] [CrossRef]
- Moran, B.; Shih, C. Crack tip and associated domain integrals from momentum and energy balance. Eng. Fract. Mech. 1987, 27, 615–642. [Google Scholar] [CrossRef]
- Gosz, M.; Moran, B. An interaction energy integral method for computation of mixed-mode stress intensity factors along non-planar crack fronts in three dimensions. Eng. Fract. Mech. 2002, 69, 299–319. [Google Scholar] [CrossRef]
- Courtin, S.; Gardin, C.; Bézine, G.; Ben Hadj Hamouda, H. Advantages of the J-integral approach for calculating stress intensity factors when using the commercial finite element software ABAQUS. Eng. Fract. Mech. 2005, 72, 2174–2185. [Google Scholar] [CrossRef]
- Kim, J.H.; Paulino, G.H. The interaction integral for fracture of orthotropic functionally graded materials: Evaluation of stress intensity factors. Int. J. Solids Struct. 2003, 40, 3967–4001. [Google Scholar] [CrossRef]
- Rybicki, E.; Kanninen, M. A finite element calculation of stress intensity factors by a modified crack closure integral. Eng. Fract. Mech. 1977, 9, 931–938. [Google Scholar] [CrossRef]
- Raju, I. Calculation of strain-energy release rates with higher order and singular finite elements. Eng. Fract. Mech. 1987, 28, 251–274. [Google Scholar] [CrossRef]
- Krueger, R. Virtual crack closure technique: History, approach, and applications. Appl. Mech. Rev. 2004, 57, 109. [Google Scholar] [CrossRef]
- Karihaloo, B.; Xiao, Q. Accurate determination of the coefficients of elastic crack tip asymptotic field by a hybrid crack element with p-adaptivity. Eng. Fract. Mech. 2001, 68, 1609–1630. [Google Scholar] [CrossRef]
- Karihaloo, B.L.; Xiao, Q.Z. Asymptotic fields at the tip of a cohesive crack. Int. J. Fract. 2008, 150, 55–74. [Google Scholar] [CrossRef]
- Wang, Y.; Cerigato, C.; Waisman, H.; Benvenuti, E. XFEM with high-order material-dependent enrichment functions for stress intensity factors calculation of interface cracks using Irwin’s crack closure integral. Eng. Fract. Mech. 2017, 178, 148–168. [Google Scholar] [CrossRef]
- Belytschko, T.; Lu, Y.; Gu, L. Element-free Galerkin methods. Int. J. Numer. Methods Eng. 1994, 37, 229–256. [Google Scholar] [CrossRef]
- Belytschko, T.; Gu, L.; Lu, Y. Fracture and crack growth by element free Galerkin methods. Model. Simul. Mater. Sci. Eng. 1994, 2, 519. [Google Scholar] [CrossRef]
- Lu, Y.; Belytschko, T.; Gu, L. A new implementation of the element free Galerkin method. Comput. Methods Appl. Mech. Eng. 1994, 113, 397–414. [Google Scholar] [CrossRef]
- Nguyen, V.P.; Rabczuk, T.; Bordas, S.; Duflot, M. Meshless methods: A review and computer implementation aspects. Math. Comput. Simul. 2008, 79, 763–813. [Google Scholar] [CrossRef] [Green Version]
- Sulsky, D.; Chen, Z.; Schreyer, H.L. A particle method for history-dependent materials. Comput. Methods Appl. Mech. Eng. 1994, 118, 179–196. [Google Scholar] [CrossRef]
- Cottet, G.H.; Raviart, P.A. On particle-in-cell methods for the Vlasov-Poisson equations. Transp. Theory Stat. Phys. 1986, 15, 1–31. [Google Scholar] [CrossRef]
- Nairn, J.A. Material point method calculations with explicit cracks. Comput. Model. Eng. Sci. 2003, 4, 649–664. [Google Scholar]
- Moutsanidis, G.; Kamensky, D.; Zhang, D.Z.; Bazilevs, Y.; Long, C.C. Modeling strong discontinuities in the material point method using a single velocity field. Comput. Methods Appl. Mech. Eng. 2019, 345, 584–601. [Google Scholar] [CrossRef]
- Kakouris, E.; Triantafyllou, S.P. Phase-field material point method for brittle fracture. Int. J. Numer. Methods Eng. 2017, 112, 1750–1776. [Google Scholar] [CrossRef]
- Kakouris, E.; Triantafyllou, S. Material point method for crack propagation in anisotropic media: A phase field approach. Arch. Appl. Mech. 2018, 88, 287–316. [Google Scholar] [CrossRef]
- Maschke, H.G.; Kuna, M. A review of boundary and finite element methods in fracture mechanics. Theor. Appl. Fract. Mech. 1985, 4, 181–189. [Google Scholar] [CrossRef]
- Rokhlin, V. Rapid solution of integral equations of classical potential theory. J. Comput. Phys. 1985, 60, 187–207. [Google Scholar] [CrossRef]
- Hackbusch, W. A Sparse Matrix Arithmetic Based on $\Cal H$-Matrices. Part I: Introduction to ${\Cal H}$-Matrices. Computing 1999, 62, 89–108. [Google Scholar] [CrossRef]
- Hughes, T.; Cottrell, J.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Eng. 2005, 194, 4135–4195. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, V.P.; Anitescu, C.; Bordas, S.P.; Rabczuk, T. Isogeometric analysis: An overview and computer implementation aspects. Math. Comput. Simul. 2015, 117, 89–116. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Qian, X. Isogeometric analysis and shape optimization via boundary integral. Comput.-Aided Des. 2011, 43, 1427–1437. [Google Scholar] [CrossRef]
- Simpson, R.N.; Bordas, S.; Trevelyan, J.; Rabczuk, T. A two-dimensional isogeometric boundary element method for elastostatic analysis. Comput. Methods Appl. Mech. Eng. 2012, 209, 87–100. [Google Scholar] [CrossRef]
- Scott, M.; Simpson, R.; Evans, J.; Lipton, S.; Bordas, S.; Hughes, T.; Sederberg, T. Isogeometric boundary element analysis using unstructured T-splines. Comput. Methods Appl. Mech. Eng. 2013, 254, 197–221. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Yvonnet, J.; Zhu, Q.Z.; Bornert, M.; Chateau, C. A phase-field method for computational modeling of interfacial damage interacting with crack propagation in realistic microstructures obtained by microtomography. Comput. Methods Appl. Mech. Eng. 2016, 312, 567–595. [Google Scholar] [CrossRef] [Green Version]
- Peng, X.; Atroshchenko, E.; Kerfriden, P.; Bordas, S. Isogeometric boundary element methods for three dimensional static fracture and fatigue crack growth. Comput. Methods Appl. Mech. Eng. 2017, 316, 151–185. [Google Scholar] [CrossRef]
- Moës, N.; Dolbow, J.; Belytschko, T. A finite element method for crack growth without remeshing. Int. J. Numer. Methods Eng. 1999, 46, 131–150. [Google Scholar] [CrossRef]
- Strouboulis, T.; Babuška, I.; Copps, K. The design and analysis of the generalized finite element method. Comput. Methods Appl. Mech. Eng. 2000, 181, 43–69. [Google Scholar] [CrossRef]
- Babuška, I.; Caloz, G.; Osborn, J. Special finite element methods for a class of second order elliptic problems with rough coefficients. SIAM J. Numer. Anal. 1994, 31, 945–981. [Google Scholar] [CrossRef]
- Babuška, I.; Melenk, J. The partition of unity method. Int. J. Numer. Methods Eng. 1996, 40, 727–758. [Google Scholar] [CrossRef]
- Melenk, J.; Babuška, I. The partition of unity finite element method: Basic theory and applications. Comput. Methods Appl. Mech. Eng. 1996, 139, 289–314. [Google Scholar] [CrossRef] [Green Version]
- Wolf, J.P.; Song, C. Consistent infinitesimal finite-element cell method: In-plane motion. Comput. Methods Appl. Mech. Eng. 1995, 123, 355–370. [Google Scholar] [CrossRef]
- Song, C.; Tin-Loi, F.; Gao, W. A definition and evaluation procedure of generalized stress intensity factors at cracks and multi-material wedges. Eng. Fract. Mech. 2010, 77, 2316–2336. [Google Scholar] [CrossRef]
- Ooi, E.; Man, H.; Natarajan, S.; Song, C. Adaptation of quadtree meshes in the scaled boundary finite element method for crack propagation modelling. Eng. Fract. Mech. 2015, 144, 101–117. [Google Scholar] [CrossRef] [Green Version]
- Barenblatt, G.I. The Mathematical Theory of Equilibrium Cracks in Brittle Fracture. Adv. Appl. Mech. 1962, 7, 55–129. [Google Scholar]
- Dugdale, D.S. Yielding of Steel Sheets Containing Slits. J. Mech. Phys. Solids 1960, 8, 100–104. [Google Scholar] [CrossRef]
- Xu, X.P.; Needleman, A. Numerical simulations of fast crack growth in brittle solids. J. Mech. Phys. Solids 1994, 42, 1397–1434. [Google Scholar] [CrossRef]
- Chen, Z.; Bunger, A.P.; Zhang, X.; Jeffrey, R.G. Cohesive zone finite element-based modeling of hydraulic fractures. Acta Mech. Solida Sin. 2009, 22, 443–452. [Google Scholar] [CrossRef]
- Salen, A.L.; Aliabadi, M.H. Crack growth analysis in concrete using boundary element method. Eng. Fract. Mech. 1995, 51, 533–545. [Google Scholar]
- Nguyen, T.C.; Bui, H.H.; Nguyen, P.V.; Nguyen, G.D. A Conceptual Approach to Modelling Rock Fracture using the Smoothed Particle Hydrodynamics and Cohesive Cracks. In Proceedings of the ISRM Regional Symposium-EUROCK 2015, Salzburg, Austria, 7–10 October 2015; International Society for Rock Mechanics and Rock Engineering: Lisbon, Portugal, 2015. [Google Scholar]
- Klein, P.A.; Foulk, J.W.; Chen, E.P.; Wimmer, S.A.; Gao, H.J. Physics-based modeling of brittle fracture: Cohesive formulations and the application of meshfree methods. Theor. Appl. Fract. Mech. 2001, 37, 99–166. [Google Scholar] [CrossRef]
- Soparat, P.; Nanakorn, P. Analysis of Cohesive Crack Growth by the Element-Free Galerkin Method. J. Mech. 2008, 24, 45–54. [Google Scholar] [CrossRef] [Green Version]
- Remmers, J.J.C.; de Borst, R.; Needleman, A. A cohesive segments method for the simulation of crack growth. Comput. Mech. 2003, 31, 69–77. [Google Scholar] [CrossRef] [Green Version]
- Remmers, J.J.C.; de Borst, R.; Needleman, A. The simulation of dynamic crack propagation using the cohesive segments method. J. Mech. Phys. Solids 2008, 56, 70–92. [Google Scholar] [CrossRef]
- Rabczuk, T.; Zi, G. A Meshfree Method based on the Local Partition of Unity for Cohesive Cracks. Comput. Mech. 2007, 39, 743–760. [Google Scholar] [CrossRef]
- Barbieri, E.; Meo, M. A Meshless Cohesive Segments Method for Crack Initiation and Propagation in Composites. Appl. Compos. Mater. 2011, 18, 45–63. [Google Scholar] [CrossRef]
- Msekh, M.A.; Sargado, J.M.; Jamshidian, M.; Areias, P.M.; Rabczuk, T. Abaqus implementation of phase-field model for brittle fracture. Comput. Mater. Sci. 2015, 96, 472–484. [Google Scholar] [CrossRef]
- Rashid, Y. Ultimate strength analysis of prestressed concrete pressure vessels. Nucl. Eng. Des. 1968, 7, 334–344. [Google Scholar] [CrossRef]
- Peerlings, R.D.; De Borst, R.; Brekelmans, W.D.; De Vree, J. Gradient enhanced damage for quasi-brittle materials. Int. J. Numer. Methods Eng. 1996, 39, 3391–3403. [Google Scholar] [CrossRef]
- Simone, A.; Wells, G.N.; Sluys, L.J. From continuous to discontinuous failure in a gradient-enhanced continuum damage model. Comput. Methods Appl. Mech. Eng. 2003, 192, 4581–4607. [Google Scholar] [CrossRef]
- Moës, N.; Stolz, C.; Bernard, P.E.; Chevaugeon, N. A level set based model for damage growth: The thick level set approach. Int. J. Numer. Methods Eng. 2011, 86, 358–380. [Google Scholar] [CrossRef]
- Bourdin, B.; Francfort, G.A.; Marigo, J.J. The variational approach to fracture. J. Elast. 2008, 91, 5–148. [Google Scholar] [CrossRef]
- De Borst, R.; Verhoosel, C.V. Gradient damage vs phase-field approaches for fracture: Similarities and differences. Comput. Methods Appl. Mech. Eng. 2016, 312, 78–94. [Google Scholar] [CrossRef] [Green Version]
- Mandal, T.K.; Nguyen, V.P.; Heidarpour, A. Phase field and gradient enhanced damage models for quasi-brittle failure: A numerical comparative study. Eng. Fract. Mech. 2019, 207, 48–67. [Google Scholar] [CrossRef]
- Cazes, F.; Moës, N. Comparison of a phase-field model and of a thick level set model for brittle and quasi-brittle fracture. Int. J. Numer. Methods Eng. 2015, 103, 114–143. [Google Scholar] [CrossRef]
- Francfort, G.A.; Marigo, J.J. Revisiting brittle fracture as an energy minimization problem. J. Mech. Phys. Solids 1998, 46, 1319–1342. [Google Scholar] [CrossRef]
- Ambrosio, L.; Tortorelli, V.M. Approximation of functional depending on jumps by elliptic functional via Γ-convergence. Commun. Pure Appl. Math. 1990, 43, 999–1036. [Google Scholar] [CrossRef]
- Aldakheel, F.; Hudobivnik, B.; Hussein, A.; Wriggers, P. Phase-field modeling of brittle fracture using an efficient virtual element scheme. Comput. Methods Appl. Mech. Eng. 2018, 341, 443–466. [Google Scholar] [CrossRef]
- Moutsanidis, G.; Kamensky, D.; Chen, J.; Bazilevs, Y. Hyperbolic phase field modeling of brittle fracture: Part II-immersed IGA-RKPM coupling for air-blast-structure interaction. J. Mech. Phys. Solids 2018, 121, 114–132. [Google Scholar] [CrossRef]
- Alessi, R.; Vidoli, S.; De Lorenzis, L. A phenomenological approach to fatigue with a variational phase-field model: The one-dimensional case. Eng. Fract. Mech. 2018, 190, 53–73. [Google Scholar] [CrossRef]
- Wu, J.; Wang, D.; Lin, Z.; Qi, D. An efficient gradient smoothing meshfree formulation for the fourth-order phase field modeling of brittle fracture. Comput. Part. Mech. 2019. [Google Scholar] [CrossRef]
- Ambati, M.; Kruse, R.; De Lorenzis, L. A phase-field model for ductile fracture at finite strains and its experimental verification. Comput. Mech. 2016, 57, 149–167. [Google Scholar] [CrossRef]
- Borden, M.J.; Hughes, T.J.; Landis, C.M.; Anvari, A.; Lee, I.J. A phase-field formulation for fracture in ductile materials: Finite deformation balance law derivation, plastic degradation, and stress triaxiality effects. Comput. Methods Appl. Mech. Eng. 2016, 312, 130–166. [Google Scholar] [CrossRef] [Green Version]
- Wilson, Z.A.; Landis, C.M. Phase-field modeling of hydraulic fracture. J. Mech. Phys. Solids 2016, 96, 264–290. [Google Scholar] [CrossRef] [Green Version]
- Miehe, C.; Mauthe, S. Phase field modeling of fracture in multi-physics problems. Part III. Crack driving forces in hydro-poro-elasticity and hydraulic fracturing of fluid-saturated porous media. Comput. Methods Appl. Mech. Eng. 2016, 304, 619–655. [Google Scholar] [CrossRef]
- Heider, Y.; Markert, B. A phase-field modeling approach of hydraulic fracture in saturated porous media. Mech. Res. Commun. 2017, 80, 38–46. [Google Scholar] [CrossRef]
- Ehlers, W.; Luo, C. A phase-field approach embedded in the Theory of Porous Media for the description of dynamic hydraulic fracturing. Comput. Methods Appl. Mech. Eng. 2017, 315, 348–368. [Google Scholar] [CrossRef]
- Pillai, U.; Heider, Y.; Markert, B. A diffusive dynamic brittle fracture model for heterogeneous solids and porous materials with implementation using a user-element subroutine. Comput. Mater. Sci. 2018, 153, 36–47. [Google Scholar] [CrossRef]
- Griffith, A. The phenomena of rupture and flow in solids. Philos. Trans. R. Soc. Lond. Ser. A Contain. Pap. Math. Phys. Character 1920, 221, 163–198. [Google Scholar] [CrossRef]
- Erdogan, F.; Sih, G. On the crack extension in plates under plane loading and transverse shear. J. Basic Eng. 1963, 85, 519–525. [Google Scholar] [CrossRef]
- Nuismer, R. An energy release rate criterion for mixed mode fracture. Int. J. Fract. 1975, 11, 245–250. [Google Scholar] [CrossRef]
- Sih, G. Strain-energy-density factor applied to mixed mode crack problems. Int. J. Fract. 1974, 10, 305–321. [Google Scholar] [CrossRef]
- Abdelaziz, Y.; Hamouine, A. A survey of the extended finite element. Comput. Struct. 2008, 86, 1141–1151. [Google Scholar] [CrossRef]
- Belytschko, T.; Gracie, R.; Ventura, G. A review of extended/generalized finite element methods for material modeling. Model. Simul. Mater. Sci. Eng. 2009, 17, 043001. [Google Scholar] [CrossRef]
- Fries, T.; Belytschko, T. The extended/generalized finite element method: An overview of the method and its applications. Int. J. Numer. Methods Eng. 2010, 84, 253–304. [Google Scholar] [CrossRef]
- Sukumar, N.; Dolbow, J.; Moës, N. Extended finite element method in computational fracture mechanics: A retrospective examination. Int. J. Fract. 2015, 196, 189–206. [Google Scholar] [CrossRef]
- Zhang, Q.; Banerjee, U.; Babuška, I. Higher order stable generalized finite element method. Numer. Math. 2014, 128, 1–29. [Google Scholar] [CrossRef]
- Griebel, M.; Schweitzer, M. A particle-partition of unity method part VII: Adaptivity. In Meshfree Methods for Partial Differential Equations III; Springer: Berlin, Germany, 2007; pp. 121–147. [Google Scholar]
- Hong, W.; Lee, P. Mesh based construction of flat-top partition of unity functions. Appl. Math. Comput. 2013, 219, 8687–8704. [Google Scholar] [CrossRef]
- Belytschko, T.; Black, T. Elastic crack growth in finite elements with minimal remeshing. Int. J. Numer. Methods Eng. 1999, 620, 601–620. [Google Scholar] [CrossRef]
- Hansbo, A.; Hansbo, P. A finite element method for the simulation of strong and weak discontinuities in solid mechanics. Comput. Methods Appl. Mech. Eng. 2004, 193, 3523–3540. [Google Scholar] [CrossRef]
- Mariani, S.; Perego, U. Extended finite element method for quasi-brittle fracture. Int. J. Numer. Methods Eng. 2003, 58, 103–126. [Google Scholar] [CrossRef]
- Cheng, K.; Fries, T. Higher-order XFEM for curved strong and weak discontinuities. Int. J. Numer. Methods Eng. 2010, 82, 564–590. [Google Scholar] [CrossRef]
- Agathos, K.; Chatzi, E.; Bordas, S. A unified enrichment approach addressing blending and conditioning issues in enriched finite elements. Comput. Methods Appl. Mech. Eng. 2019, 349, 673–700. [Google Scholar] [CrossRef]
- Duarte, C.; Reno, L.; Simone, A. A high-order generalized FEM for through-the-thickness branched cracks. Int. J. Numer. Methods Eng. 2007, 72, 325–351. [Google Scholar] [CrossRef]
- Daux, C.; Moës, N.; Dolbow, J.; Sukumar, N.; Belytschko, T. Arbitrary branched and intersecting cracks with the extended finite element method. Int. J. Numer. Methods Eng. 2000, 48, 1741–1760. [Google Scholar] [CrossRef]
- Stazi, F.; Budyn, E.; Chessa, J.; Belytschko, T. An extended finite element method with higher-order elements for curved cracks. Comput. Mech. 2003, 31, 38–48. [Google Scholar] [CrossRef]
- Laborde, P.; Pommier, J.; Renard, Y.; Salaün, M. High-order extended finite element method for cracked domains. Int. J. Numer. Methods Eng. 2005, 64, 354–381. [Google Scholar] [CrossRef] [Green Version]
- Béchet, E.; Minnebo, H.; Moës, N.; Burgardt, B. Improved implementation and robustness study of the X-FEM for stress analysis around cracks. Int. J. Numer. Methods Eng. 2005, 64, 1033–1056. [Google Scholar] [CrossRef] [Green Version]
- Duarte, C.; Babuška, I.; Oden, J. Generalized finite element methods for three-dimensional structural mechanics problems. Comput. Struct. 2000, 77, 215–232. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Q.; Karihaloo, B. Direct evaluation of accurate coefficients of the linear elastic crack tip asymptotic field. Fatigue Fract. Eng. Mater. Struct. 2003, 26, 719–729. [Google Scholar] [CrossRef]
- Liu, X.; Xiao, Q.; Karihaloo, B. XFEM for direct evaluation of mixed mode SIFs in homogeneous and bi-materials. Int. J. Numer. Methods Eng. 2004, 59, 1103–1118. [Google Scholar] [CrossRef]
- Zamani, A.; Gracie, R.; Eslami, M. Cohesive and non-cohesive fracture by higher-order enrichment of XFEM. Int. J. Numer. Methods Eng. 2012, 90, 452–483. [Google Scholar] [CrossRef]
- Gupta, V.; Duarte, C.; Babuška, I.; Banerjee, U. A stable and optimally convergent generalized FEM (SGFEM) for linear elastic fracture mechanics. Comput. Methods Appl. Mech. Eng. 2013, 266, 23–39. [Google Scholar] [CrossRef]
- Gupta, V.; Duarte, C.; Babuška, I.; Banerjee, U. Stable GFEM (SGFEM): Improved conditioning and accuracy of GFEM/XFEM for three-dimensional fracture mechanics. Comput. Methods Appl. Mech. Eng. 2015, 289, 355–386. [Google Scholar] [CrossRef]
- Nicaise, S.; Renard, Y.; Chahine, E. Optimal convergence analysis for the extended finite element method. Int. J. Numer. Methods Eng. 2011, 86, 528–548. [Google Scholar] [CrossRef] [Green Version]
- Chevaugeon, N.; Moës, N.; Minnebo, H. Improved crack tip enrichment functions and integration for crack modeling using the extended finite element method. J. Multiscale Comput. Eng. 2013, 11, 597–631. [Google Scholar] [CrossRef]
- Zi, G.; Belytschko, T. New crack-tip elements for XFEM and applications to cohesive cracks. Int. J. Numer. Methods Eng. 2003, 57, 2221–2240. [Google Scholar] [CrossRef]
- Babuška, I.; Banerjee, U. Stable generalized finite element method (SGFEM). Comput. Methods Appl. Mech. Eng. 2012, 201, 91–111. [Google Scholar] [CrossRef]
- Chessa, J.; Wang, H.; Belytschko, T. On the construction of blending elements for local partition of unity enriched finite elements. Int. J. Numer. Methods Eng. 2003, 57, 1015–1038. [Google Scholar] [CrossRef]
- Gracie, R.; Wang, H.; Belytschko, T. Blending in the extended finite element method by discontinuous Galerkin and assumed strain methods. Int. J. Numer. Methods Eng. 2008, 74, 1645–1669. [Google Scholar] [CrossRef]
- Tarancón, J.; Vercher, A.; Giner, E.; Fuenmayor, F. Enhanced blending elements for XFEM applied to linear elastic fracture mechanics. Int. J. Numer. Methods Eng. 2009, 77, 126–148. [Google Scholar] [CrossRef]
- Chahine, E.; Laborde, P.; Renard, Y. A non-conformal eXtended Finite Element approach: Integral matching Xfem. Appl. Numer. Math. 2011, 61, 322–343. [Google Scholar] [CrossRef]
- Agathos, K.; Chatzi, E.; Bordas, S. Stable 3D extended finite elements with higher order enrichment for accurate non planar fracture. Comput. Methods Appl. Mech. Eng. 2016, 306, 19–46. [Google Scholar] [CrossRef]
- Fries, T. A corrected XFEM approximation without problems in blending elements. Int. J. Numer. Methods Eng. 2008, 75, 503–532. [Google Scholar] [CrossRef]
- Chahine, E.; Laborde, P. Crack tip enrichment in the XFEM using a cutoff function. Int. J. Numer. Methods Eng. 2008, 75, 629–646. [Google Scholar] [CrossRef]
- Ventura, G.; Gracie, R.; Belytschko, T. Fast integration and weight function blending in the extended finite element method. Int. J. Numer. Methods Eng. 2009, 77, 1–29. [Google Scholar] [CrossRef]
- Menk, A.; Bordas, S. A robust preconditioning technique for the extended finite element method. Int. J. Numer. Methods Eng. 2011, 85, 1609–1632. [Google Scholar] [CrossRef]
- Lang, C.; Makhija, D.; Doostan, A.; Maute, K. A simple and efficient preconditioning scheme for heaviside enriched XFEM. Comput. Mech. 2014, 54, 1357–1374. [Google Scholar] [CrossRef]
- Loehnert, S. A stabilization technique for the regularization of nearly singular extended finite elements. Comput. Mech. 2014, 54, 523–533. [Google Scholar] [CrossRef]
- Ventura, G.; Tesei, C. Stabilized X-FEM for Heaviside and nonlinear enrichments. In Advances in Discretization Methods; Springer: Berlin, Germany, 2016; pp. 209–228. [Google Scholar]
- Agathos, K.; Bordas, S.; Chatzi, E. Improving the conditioning of XFEM/GFEM for fracture mechanics problems through enrichment quasi-orthogonalization. Comput. Methods Appl. Mech. Eng. 2019, 346, 1051–1073. [Google Scholar] [CrossRef]
- Agathos, K.; Chatzi, E.; Bordas, S.; Talaslidis, D. A well-conditioned and optimally convergent XFEM for 3D linear elastic fracture. Int. J. Numer. Methods Eng. 2016, 105, 643–677. [Google Scholar] [CrossRef]
- Duarte, C.; Hamzeh, O.; Liszka, T.; Tworzydlo, W. A generalized finite element method for the simulation of three-dimensional dynamic crack propagation. Comput. Methods Appl. Mech. Eng. 2001, 190, 2227–2262. [Google Scholar] [CrossRef]
- Sukumar, N.; Moës, N.; Moran, B.; Belytschko, T. Extended finite element method for three-dimensional crack modelling. Int. J. Numer. Methods Eng. 2000, 48, 1549–1570. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef] [Green Version]
- Sethian, J. Level Set Methods and Fast Marching Methods: Evolving Interfaces in Computational Geometry, Fluid Mechanics, Computer Vision, and Materials Science; Cambridge University Press: Cambridge, UK, 1999; Volume 3. [Google Scholar]
- Stolarska, M.; Chopp, D.; Moës, N.; Belytschko, T. Modelling crack growth by level sets in the extended finite element method. Int. J. Numer. Methods Eng. 2001, 51, 943–960. [Google Scholar] [CrossRef]
- Moës, N.; Gravouil, A.; Belytschko, T. Non-planar 3D crack growth by the extended finite element and level sets-Part I: Mechanical model. Int. J. Numer. Methods Eng. 2002, 53, 2549–2568. [Google Scholar] [CrossRef]
- Gravouil, A.; Moës, N.; Belytschko, T. Non-planar 3D crack growth by the extended finite element and level sets-Part II: Level set update. Int. J. Numer. Methods Eng. 2002, 53, 2569–2586. [Google Scholar] [CrossRef]
- Sukumar, N.; Chopp, D.; Béchet, E.; Moës, N. Three-dimensional non-planar crack growth by a coupled extended finite element and fast marching method. Int. J. Numer. Methods Eng. 2008, 76, 727–748. [Google Scholar] [CrossRef] [Green Version]
- Duflot, M. A study of the representation of cracks with level sets. Int. J. Numer. Methods Eng. 2007, 70, 1261–1302. [Google Scholar] [CrossRef]
- Elguedj, T.; de Saint Maurice, R.; Combescure, A.; Faucher, V.; Prabel, B. Extended finite element modeling of 3D dynamic crack growth under impact loading. Finite Elem. Anal. Des. 2018, 151, 1–17. [Google Scholar] [CrossRef]
- Fries, T.; Baydoun, M. Crack propagation with the extended finite element method and a hybrid explicit-implicit crack description. Int. J. Numer. Methods Eng. 2012, 89, 1527–1558. [Google Scholar] [CrossRef]
- Ventura, G.; Budyn, E.; Belytschko, T. Vector level sets for description of propagating cracks in finite elements. Int. J. Numer. Methods Eng. 2003, 58, 1571–1592. [Google Scholar] [CrossRef]
- Agathos, K.; Ventura, G.; Chatzi, E.; Bordas, S. Stable 3D XFEM/vector level sets for non-planar 3D crack propagation and comparison of enrichment schemes. Int. J. Numer. Methods Eng. 2018, 113, 252–276. [Google Scholar] [CrossRef]
- Agathos, K.; Ventura, G.; Chatzi, E.; Bordas, S. Well Conditioned Extended Finite Elements and Vector Level Sets for Three-Dimensional Crack Propagation. In Geometrically Unfitted Finite Element Methods and Applications; Springer: Berlin, Germany, 2017; pp. 307–329. [Google Scholar]
- Sadeghirad, A.; Chopp, D.; Ren, X.; Fang, E.; Lua, J. A novel hybrid approach for level set characterization and tracking of non-planar 3D cracks in the extended finite element method. Eng. Fract. Mech. 2016, 160, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Fries, T.; Omerović, S.; Schöllhammer, D.; Steidl, J. Higher-order meshing of implicit geometries—Part I: Integration and interpolation in cut elements. Comput. Methods Appl. Mech. Eng. 2017, 313, 759–784. [Google Scholar] [CrossRef]
- Paul, B.; Ndeffo, M.; Massin, P.; Moës, N. An integration technique for 3D curved cracks and branched discontinuities within the extended Finite Element Method. Finite Elem. Anal. Des. 2017, 123, 19–50. [Google Scholar] [CrossRef]
- Ventura, G. On the elimination of quadrature subcells for discontinuous functions in the eXtended Finite-Element Method. Int. J. Numer. Methods Eng. 2006, 66, 761–795. [Google Scholar] [CrossRef]
- Ventura, G.; Benvenuti, E. Equivalent polynomials for quadrature in Heaviside function enriched elements. Int. J. Numer. Methods Eng. 2015, 102, 688–710. [Google Scholar] [CrossRef]
- Natarajan, S.; Mahapatra, D.; Bordas, S. Integrating strong and weak discontinuities without integration subcells and example applications in an XFEM/GFEM framework. Int. J. Numer. Methods Eng. 2010, 83, 269–294. [Google Scholar] [CrossRef] [Green Version]
- Mousavi, S.; Sukumar, N. Generalized Gaussian quadrature rules for discontinuities and crack singularities in the extended finite element method. Comput. Methods Appl. Mech. Eng. 2010, 199, 3237–3249. [Google Scholar] [CrossRef] [Green Version]
- Loehnert, S.; Mueller-Hoeppe, D.; Wriggers, P. 3D corrected XFEM approach and extension to finite deformation theory. Int. J. Numer. Methods Eng. 2011, 86, 431–452. [Google Scholar] [CrossRef]
- Minnebo, H. Three-dimensional integration strategies of singular functions introduced by the XFEM in the LEFM. Int. J. Numer. Methods Eng. 2012, 92, 1117–1138. [Google Scholar] [CrossRef]
- González-Albuixech, V.; Giner, E.; Tarancon, J.; Fuenmayor, F.; Gravouil, A. Convergence of domain integrals for stress intensity factor extraction in 2-D curved cracks problems with the extended finite element method. Int. J. Numer. Methods Eng. 2013, 94, 740–757. [Google Scholar] [CrossRef] [Green Version]
- González-Albuixech, V.; Giner, E.; Tarancón, J.; Fuenmayor, F.; Gravouil, A. Domain integral formulation for 3-D curved and non-planar cracks with the extended finite element method. Comput. Methods Appl. Mech. Eng. 2013, 264, 129–144. [Google Scholar] [CrossRef] [Green Version]
- Lan, M.; Waisman, H.; Harari, I. A direct analytical method to extract mixed-mode components of strain energy release rates from Irwin’s integral using extended finite element method. Int. J. Numer. Methods Eng. 2013, 95, 1033–1052. [Google Scholar] [CrossRef]
- Lan, M.; Waisman, H.; Harari, I. A High-order extended finite element method for extraction of mixed-mode strain energy release rates in arbitrary crack settings based on Irwin’s integral. Int. J. Numer. Methods Eng. 2013, 96, 787–812. [Google Scholar] [CrossRef]
- Song, G.; Waisman, H.; Lan, M.; Harari, I. Extraction of stress intensity factors from Irwin’s integral using high-order XFEM on triangular meshes. Int. J. Numer. Methods Eng. 2015, 102, 528–550. [Google Scholar] [CrossRef]
- Wang, Y.; Waisman, H. An arc-length method for controlled cohesive crack propagation using high-order XFEM and Irwin’s crack closure integral. Eng. Fract. Mech. 2018, 199, 235–256. [Google Scholar] [CrossRef]
- Schätzer, M.; Fries, T.P. Stress Intensity Factors Through Crack Opening Displacements in the XFEM. In Advances in Discretization Methods; Springer: Berlin, Germany, 2016; pp. 143–164. [Google Scholar]
- Sukumar, N.; Prévost, J. Modeling quasi-static crack growth with the extended finite element method Part I: Computer implementation. Int. J. Solids Struct. 2003, 40, 7513–7537. [Google Scholar] [CrossRef]
- Huang, R.; Sukumar, N.; Prévost, J. Modeling quasi-static crack growth with the extended finite element method Part II: Numerical applications. Int. J. Solids Struct. 2003, 40, 7539–7552. [Google Scholar] [CrossRef]
- Budyn, E.; Zi, G.; Moës, N.; Belytschko, T. A method for multiple crack growth in brittle materials without remeshing. Int. J. Numer. Methods Eng. 2004, 61, 1741–1770. [Google Scholar] [CrossRef]
- Bordas, S.; Moran, B. Enriched finite elements and level sets for damage tolerance assessment of complex structures. Eng. Fract. Mech. 2006, 73, 1176–1201. [Google Scholar] [CrossRef] [Green Version]
- Lecampion, B. An extended finite element method for hydraulic fracture problems. Commun. Numer. Methods Eng. 2009, 25, 121–133. [Google Scholar] [CrossRef]
- Sutula, D.; Bordas, S. Minimum energy multiple crack propagation. Part III: XFEM computer implementation and applications. Eng. Fract. Mech. 2018, 191, 257–276. [Google Scholar] [CrossRef] [Green Version]
- Bordas, S.; Nguyen, P.; Dunant, C.; Guidoum, A.; Nguyen-Dang, H. An extended finite element library. Int. J. Numer. Methods Eng. 2007, 71, 703–732. [Google Scholar] [CrossRef] [Green Version]
- Malekan, M.; Silva, L.; Barros, F.; Pitangueira, R.; Penna, S. Two-dimensional fracture modeling with the generalized/extended finite element method: An object-oriented programming approach. Adv. Eng. Softw. 2018, 115, 168–193. [Google Scholar] [CrossRef]
- Sutula, D.; Bordas, S. Minimum energy multiple crack propagation. Part II: Discrete Solution with XFEM. Eng. Fract. Mech. 2018, 191, 225–256. [Google Scholar] [CrossRef]
- Sutula, D.; Kerfriden, P.; van Dam, T.; Bordas, S. Minimum energy multiple crack propagation. Part I: Theory and state of the art review. Eng. Fract. Mech. 2018, 191, 205–224. [Google Scholar] [CrossRef]
- Belytschko, T.; Chen, H.; Xu, J.; Zi, G. Dynamic crack propagation based on loss of hyperbolicity and a new discontinuous enrichment. Int. J. Numer. Methods Eng. 2003, 58, 1873–1905. [Google Scholar] [CrossRef]
- Réthoré, J.; Gravouil, A.; Combescure, A. An energy-conserving scheme for dynamic crack growth using the extended finite element method. Int. J. Numer. Methods Eng. 2005, 63, 631–659. [Google Scholar] [CrossRef]
- Menouillard, T.; Rethore, J.; Combescure, A.; Bung, H. Efficient explicit time stepping for the eXtended Finite Element Method (X-FEM). Int. J. Numer. Methods Eng. 2006, 68, 911–939. [Google Scholar] [CrossRef]
- Asadpoure, A.; Mohammadi, S.; Vafai, A. Modeling crack in orthotropic media using a coupled finite element and partition of unity methods. Finite Elem. Anal. Des. 2006, 42, 1165–1175. [Google Scholar] [CrossRef]
- Legrain, G.; Moes, N.; Verron, E. Stress analysis around crack tips in finite strain problems using the extended finite element method. Int. J. Numer. Methods Eng. 2005, 63, 290–314. [Google Scholar] [CrossRef]
- Prabel, B.; Combescure, A.; Gravouil, A.; Marie, S. Level set X-FEM non-matching meshes: Application to dynamic crack propagation in elastic–plastic media. Int. J. Numer. Methods Eng. 2007, 69, 1553–1569. [Google Scholar] [CrossRef]
- Moës, N.; Belytschko, T. Extended finite element method for cohesive crack growth. Eng. Fract. Mech. 2002, 69, 813–833. [Google Scholar] [CrossRef] [Green Version]
- Kausel, E. Thin-layer method: Formulation in the time domain. Int. J. Numer. Methods Eng. 1994, 37, 927–941. [Google Scholar] [CrossRef]
- Kita, E.; Kamiya, N. Trefftz method: An overview. Adv. Eng. Softw. 1995, 24, 3–12. [Google Scholar] [CrossRef]
- Patera, A.T. A spectral element method for fluid dynamics: Laminar flow in a channel expansion. J. Comput. Phys. 1984, 54, 468–488. [Google Scholar] [CrossRef]
- Nelson, R.; Dong, S.; Kalra, R. Vibrations and waves in laminated orthotropic circular cylinders. J. Sound Vib. 1971, 18, 429–444. [Google Scholar] [CrossRef]
- Silvester, P.; Lowther, D.; Carpenter, C.; Wyatt, E. Exterior finite elements for 2-dimensional field problems with open boundaries. Proc. Inst. Electr. Eng. 1977, 124, 1267. [Google Scholar] [CrossRef]
- Dasgupta, G. A Finite Element Formulation for Unbounded Homogeneous Continua. J. Appl. Mech. 1982, 49, 136–140. [Google Scholar] [CrossRef]
- Wolf, J.P.; Song, C. Dynamic-stiffness matrix in time domain of unbounded medium by infinitesimal finite element cell method. Earthq. Eng. Struct. Dyn. 1994, 23, 1181–1198. [Google Scholar] [CrossRef]
- Wolf, J.P.; Song, C. Finite-Element Modelling of Unbounded Media; Wiley: Chichester, UK; New York, NY, USA, 1996. [Google Scholar]
- Wolf, J.P. The Scaled Boundary Finite Element Method; Wiley: Chichester, UK; Hoboken, NJ, USA, 2003. [Google Scholar]
- Deeks, A.J.; Wolf, J.P. A virtual work derivation of the scaled boundary finite-element method for elastostatics. Comput. Mech. 2002, 28, 489–504. [Google Scholar] [CrossRef]
- Chidgzey, S.R.; Deeks, A.J. Determination of coefficients of crack tip asymptotic fields using the scaled boundary finite element method. Eng. Fract. Mech. 2005, 72, 2019–2036. [Google Scholar] [CrossRef]
- Song, C. Evaluation of power-logarithmic singularities, T-stresses and higher order terms of in-plane singular stress fields at cracks and multi-material corners. Eng. Fract. Mech. 2005, 72, 1498–1530. [Google Scholar] [CrossRef]
- Song, C. A super-element for crack analysis in the time domain. Int. J. Numer. Methods Eng. 2004, 61, 1332–1357. [Google Scholar] [CrossRef]
- Müller, A.; Wenck, J.; Goswami, S.; Lindemann, J.; Hohe, J.; Becker, W. The boundary finite element method for predicting directions of cracks emerging from notches at bimaterial junctions. Eng. Fract. Mech. 2005, 72, 373–386. [Google Scholar] [CrossRef]
- Lindemann, J.; Becker, W. Free-Edge Stresses around Holes in Laminates by the Boundary Finite-Element Method. Mech. Compos. Mater. 2002, 38, 407–416. [Google Scholar] [CrossRef]
- Yang, Z. Fully automatic modelling of mixed-mode crack propagation using scaled boundary finite element method. Eng. Fract. Mech. 2006, 73, 1711–1731. [Google Scholar] [CrossRef]
- Yang, Z.; Deeks, A. Fully-automatic modelling of cohesive crack growth using a finite element–scaled boundary finite element coupled method. Eng. Fract. Mech. 2007, 74, 2547–2573. [Google Scholar] [CrossRef]
- Yang, Z.J.; Deeks, A.J. Modelling cohesive crack growth using a two-step finite element-scaled boundary finite element coupled method. Int. J. Fract. 2007, 143, 333–354. [Google Scholar] [CrossRef]
- Ooi, E.; Yang, Z. Modelling multiple cohesive crack propagation using a finite element–scaled boundary finite element coupled method. Eng. Anal. Bound. Elem. 2009, 33, 915–929. [Google Scholar] [CrossRef]
- Ooi, E.; Yang, Z. Efficient prediction of deterministic size effects using the scaled boundary finite element method. Eng. Fract. Mech. 2010, 77, 985–1000. [Google Scholar] [CrossRef]
- Zhu, C.; Lin, G.; Li, J. Modelling cohesive crack growth in concrete beams using scaled boundary finite element method based on super-element remeshing technique. Comput. Struct. 2013, 121, 76–86. [Google Scholar] [CrossRef]
- Ooi, E.T.; Yang, Z.J. Modelling dynamic crack propagation using the scaled boundary finite element method. Int. J. Numer. Methods Eng. 2011, 88, 329–349. [Google Scholar] [CrossRef]
- Ooi, E.T.; Yang, Z.J.; Guo, Z.Y. Dynamic cohesive crack propagation modelling using the scaled boundary finite element method: Dynamic cohesive crack propagation modelling. Fatigue Fract. Eng. Mater. Struct. 2012, 35, 786–800. [Google Scholar] [CrossRef]
- Ooi, E.T.; Yang, Z.J. Modelling crack propagation in reinforced concrete using a hybrid finite element–scaled boundary finite element method. Eng. Fract. Mech. 2011, 78, 252–273. [Google Scholar] [CrossRef]
- Ooi, E.T.; Song, C.; Tin-Loi, F.; Yang, Z. Polygon scaled boundary finite elements for crack propagation modelling: Scaled boundary polygon FINITE elements for crack propagation. Int. J. Numer. Methods Eng. 2012, 91, 319–342. [Google Scholar] [CrossRef]
- Talischi, C.; Paulino, G.H.; Pereira, A.; Menezes, I.F.M. PolyMesher: A general-purpose mesh generator for polygonal elements written in Matlab. Struct. Multidiscip. Optim. 2012, 45, 309–328. [Google Scholar] [CrossRef]
- Chiong, I.; Ooi, E.T.; Song, C.; Tin-Loi, F. Scaled boundary polygons with application to fracture analysis of functionally graded materials: Scaled boundary polygons for functionally graded materials. Int. J. Numer. Methods Eng. 2014, 98, 562–589. [Google Scholar] [CrossRef]
- Chen, X.; Luo, T.; Ooi, E.; Ooi, E.; Song, C. A quadtree-polygon-based scaled boundary finite element method for crack propagation modeling in functionally graded materials. Theor. Appl. Fract. Mech. 2018, 94, 120–133. [Google Scholar] [CrossRef]
- Zhang, Z.; Dissanayake, D.; Saputra, A.; Wu, D.; Song, C. Three-dimensional damage analysis by the scaled boundary finite element method. Comput. Struct. 2018, 206, 1–17. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, Y.; Dissanayake, D.D.; Saputra, A.A.; Song, C. Nonlocal damage modelling by the scaled boundary finite element method. Eng. Anal. Bound. Elem. 2019, 99, 29–45. [Google Scholar] [CrossRef]
- Lin, G.; Zhang, Y.; Hu, Z.; Zhong, H. Scaled boundary isogeometric analysis for 2D elastostatics. Sci. China Phys. Mech. Astron. 2014, 57, 286–300. [Google Scholar] [CrossRef]
- Natarajan, S.; Wang, J.; Song, C.; Birk, C. Isogeometric analysis enhanced by the scaled boundary finite element method. Comput. Methods Appl. Mech. Eng. 2015, 283, 733–762. [Google Scholar] [CrossRef]
- Auricchio, F.; Calabrò, F.; Hughes, T.; Reali, A.; Sangalli, G. A simple algorithm for obtaining nearly optimal quadrature rules for NURBS-based isogeometric analysis. Comput. Methods Appl. Mech. Eng. 2012, 249–252, 15–27. [Google Scholar] [CrossRef]
- Cottrell, J.A.; Hughes, T.J.R.; Bazilevs, Y. Isogeometric Analysis: Toward Integration of CAD and FEA; Wiley: Chichester, UK; Hoboken, NJ, USA, 2009; OCLC: 441875062. [Google Scholar]
- Song, C. The Scaled Boundary Finite Element Method: Intorduction to Theory and Implementation; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Song, C.; Ooi, E.T.; Natarajan, S. A review of the scaled boundary finite element method for two-dimensional linear elastic fracture mechanics. Eng. Fract. Mech. 2018, 187, 45–73. [Google Scholar] [CrossRef] [Green Version]
- Song, C.; Wolf, J.P. The scaled boundary finite-element method—alias consistent infinitesimal finite-element cell method—For elastodynamics. Comput. Methods Appl. Mech. Eng. 1997, 147, 329–355. [Google Scholar] [CrossRef]
- Hu, Z.; Lin, G.; Wang, Y.; Liu, J. A Hamiltonian-based derivation of Scaled Boundary Finite Element Method for elasticity problems. IOP Conf. Ser. Mater. Sci. Eng. 2010, 10, 012213. [Google Scholar] [CrossRef]
- Song, C. A matrix function solution for the scaled boundary finite-element equation in statics. Comput. Methods Appl. Mech. Eng. 2004, 193, 2325–2356. [Google Scholar] [CrossRef]
- Egger, A.W.; Chatzi, E.N.; Triantafyllou, S.P. An enhanced scaled boundary finite element method for linear elastic fracture. Arch. Appl. Mech. 2017, 87, 1667–1706. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Zhu, J.Z. The superconvergent patch recovery anda posteriori error estimates. Part 1: The recovery technique. Int. J. Numer. Methods Eng. 1992, 33, 1331–1364. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Zhu, J.Z. The superconvergent patch recovery anda posteriori error estimates. Part 2: Error estimates and adaptivity. Int. J. Numer. Methods Eng. 1992, 33, 1365–1382. [Google Scholar] [CrossRef]
- Deeks, A.J.; Wolf, J.P. Stress recovery and error estimation for the scaled boundary finite-element method. Int. J. Numer. Methods Eng. 2002, 54, 557–583. [Google Scholar] [CrossRef]
- Ooi, E.; Shi, M.; Song, C.; Tin-Loi, F.; Yang, Z. Dynamic crack propagation simulation with scaled boundary polygon elements and automatic remeshing technique. Eng. Fract. Mech. 2013, 106, 1–21. [Google Scholar] [CrossRef]
- Wachspress, E.L. A Rational Basis for Function Approximation. IMA J. Appl. Math. 1971, 8, 57–68. [Google Scholar] [CrossRef]
- Sutton, O.J. The virtual element method in 50 lines of MATLAB. Numer. Algorithms 2017, 75, 1141–1159. [Google Scholar] [CrossRef]
- Ooi, E.T.; Natarajan, S.; Song, C.; Ooi, E.H. Crack propagation modelling in concrete using the scaled boundary finite element method with hybrid polygon-quadtree meshes. Int. J. Fract. 2017, 203, 135–157. [Google Scholar] [CrossRef]
- Ooi, E.T.; Natarajan, S.; Song, C.; Ooi, E.H. Dynamic fracture simulations using the scaled boundary finite element method on hybrid polygon–quadtree meshes. Int. J. Impact Eng. 2016, 90, 154–164. [Google Scholar] [CrossRef]
- Saputra, A.; Talebi, H.; Tran, D.; Birk, C.; Song, C. Automatic image-based stress analysis by the scaled boundary finite element method: Automatic image-based stress analysis by the scaled boundary fem. Int. J. Numer. Methods Eng. 2017, 109, 697–738. [Google Scholar] [CrossRef]
- Liu, G.; Li, Q.; Msekh, M.A.; Zuo, Z. Abaqus implementation of monolithic and staggered schemes for quasi-static and dynamic fracture phase-field model. Comput. Mater. Sci. 2016, 121, 35–47. [Google Scholar] [CrossRef]
- Miehe, C.; Welschinger, F.; Hofacker, M. Thermodynamically consistent phase-field models of fracture: Variational principles and multi-field FE implementations. Int. J. Numer. Methods Eng. 2010, 83, 1273–1311. [Google Scholar] [CrossRef]
- Borden, M.J.; Verhoosel, C.V.; Scott, M.A.; Hughes, T.J.; Landis, C.M. A phase-field description of dynamic brittle fracture. Comput. Methods Appl. Mech. Eng. 2012, 217, 77–95. [Google Scholar] [CrossRef]
- Gültekin, O.; Dal, H.; Holzapfel, G.A. A phase-field approach to model fracture of arterial walls: Theory and finite element analysis. Comput. Methods Appl. Mech. Eng. 2016, 312, 542–566. [Google Scholar] [CrossRef]
- Schlüter, A.; Willenbücher, A.; Kuhn, C.; Müller, R. Phase field approximation of dynamic brittle fracture. Comput. Mech. 2014, 54, 1141–1161. [Google Scholar] [CrossRef]
- Miehe, C.; Hofacker, M.; Welschinger, F. A phase field model for rate-independent crack propagation: Robust algorithmic implementation based on operator splits. Comput. Methods Appl. Mech. Eng. 2010, 199, 2765–2778. [Google Scholar] [CrossRef]
- Kuhn, C.; Müller, R. A continuum phase field model for fracture. Eng. Fract. Mech. 2010, 77, 3625–3634. [Google Scholar] [CrossRef]
- Quintanas-Corominas, A.; Reinoso, J.; Casoni, E.; Turon, A.; Mayugo, J. A phase field approach to simulate intralaminar and translaminar fracture in long fiber composite materials. Compos. Struct. 2019. [Google Scholar] [CrossRef]
- Natarajan, S.; Annabattula, R.K. Modeling crack propagation in variable stiffness composite laminates using the phase field method. Compos. Struct. 2019, 209, 424–433. [Google Scholar]
- Hansen-Dörr, A.C.; de Borst, R.; Hennig, P.; Kästner, M. Phase-field modelling of interface failure in brittle materials. Comput. Methods Appl. Mech. Eng. 2019, 346, 25–42. [Google Scholar] [CrossRef]
- Smith, M. ABAQUS/Standard User’s Manual, Version 6.9; Simulia: Johnston, RI, USA, 2009. [Google Scholar]
- Li, H.; Zhang, H.; Zheng, Y. A coupling extended multiscale finite element method for dynamic analysis of heterogeneous saturated porous media. Int. J. Numer. Methods Eng. 2015, 104, 18–47. [Google Scholar] [CrossRef]
- Li, B.; Maurini, C. Crack kinking in a variational phase-field model of brittle fracture with strongly anisotropic surface energy. J. Mech. Phys. Solids 2019, 125, 502–522. [Google Scholar] [CrossRef] [Green Version]
- Abinandanan, T.; Haider, F. An extended Cahn-Hilliard model for interfaces with cubic anisotropy. Philos. Mag. A 2001, 81, 2457–2479. [Google Scholar] [CrossRef]
- Torabi, S.; Lowengrub, J. Simulating interfacial anisotropy in thin-film growth using an extended Cahn-Hilliard model. Phys. Rev. E 2012, 85, 041603. [Google Scholar] [CrossRef]
- Shen, R.; Waisman, H.; Guo, L. Fracture of viscoelastic solids modeled with a modified phase field method. Comput. Methods Appl. Mech. Eng. 2019, 346, 862–890. [Google Scholar] [CrossRef]
- Ambati, M.; Gerasimov, T.; De Lorenzis, L. Phase-field modeling of ductile fracture. Comput. Mech. 2015, 55, 1017–1040. [Google Scholar] [CrossRef]
- Kuhn, C.; Noll, T.; Müller, R. On phase field modeling of ductile fracture. GAMM-Mitteilungen 2016, 39, 35–54. [Google Scholar] [CrossRef]
- Ambati, M.; De Lorenzis, L. Phase-field modeling of brittle and ductile fracture in shells with isogeometric NURBS-based solid-shell elements. Comput. Methods Appl. Mech. Eng. 2016, 312, 351–373. [Google Scholar] [CrossRef]
- Kiendl, J.; Ambati, M.; De Lorenzis, L.; Gomez, H.; Reali, A. Phase-field description of brittle fracture in plates and shells. Comput. Methods Appl. Mech. Eng. 2016, 312, 374–394. [Google Scholar] [CrossRef]
- Reinoso, J.; Paggi, M.; Linder, C. Phase field modeling of brittle fracture for enhanced assumed strain shells at large deformations: Formulation and finite element implementation. Comput. Mech. 2017, 59, 981–1001. [Google Scholar] [CrossRef]
- Verhoosel, C.V.; de Borst, R. A phase-field model for cohesive fracture. Int. J. Numer. Methods Eng. 2013, 96, 43–62. [Google Scholar] [CrossRef]
- Vignollet, J.; May, S.; De Borst, R.; Verhoosel, C.V. Phase-field models for brittle and cohesive fracture. Meccanica 2014, 49, 2587–2601. [Google Scholar] [CrossRef] [Green Version]
- Geelen, R.J.; Liu, Y.; Hu, T.; Tupek, M.R.; Dolbow, J.E. A phase-field formulation for dynamic cohesive fracture. arXiv 2018, arXiv:1809.09691. [Google Scholar] [CrossRef]
- Wu, J.Y.; Nguyen, V.P. A length scale insensitive phase-field damage model for brittle fracture. J. Mech. Phys. Solids 2018, 119, 20–42. [Google Scholar] [CrossRef]
- Lorentz, E. A nonlocal damage model for plain concrete consistent with cohesive fracture. Int. J. Fract. 2017, 207, 123–159. [Google Scholar] [CrossRef]
- Wu, J.Y.; Qiu, J.F.; Nguyen, V.P.; Mandal, T.K.; Zhuang, L.J. Computational modeling of localized failure in solids: XFEM vs PF-CZM. Comput. Methods Appl. Mech. Eng. 2019, 345, 618–643. [Google Scholar] [CrossRef]
- Nguyen, V.P.; Wu, J.Y. Modeling dynamic fracture of solids with a phase-field regularized cohesive zone model. Comput. Methods Appl. Mech. Eng. 2018, 340, 1000–1022. [Google Scholar] [CrossRef]
- Lorentz, E.; Godard, V. Gradient damage models: Toward full-scale computations. Comput. Methods Appl. Mech. Eng. 2011, 200, 1927–1944. [Google Scholar] [CrossRef]
- Miehe, C.; Schaenzel, L.M.; Ulmer, H. Phase field modeling of fracture in multi-physics problems. Part I. Balance of crack surface and failure criteria for brittle crack propagation in thermo-elastic solids. Comput. Methods Appl. Mech. Eng. 2015, 294, 449–485. [Google Scholar] [CrossRef]
- Tanné, E.; Li, T.; Bourdin, B.; Marigo, J.J.; Maurini, C. Crack nucleation in variational phase-field models of brittle fracture. J. Mech. Phys. Solids 2018, 110, 80–99. [Google Scholar] [CrossRef] [Green Version]
- Miehe, C.; Mauthe, S.; Teichtmeister, S. Minimization principles for the coupled problem of Darcy–Biot-type fluid transport in porous media linked to phase field modeling of fracture. J. Mech. Phys. Solids 2015, 82, 186–217. [Google Scholar] [CrossRef]
- Borden, M.J.; Hughes, T.J.; Landis, C.M.; Verhoosel, C.V. A higher-order phase-field model for brittle fracture: Formulation and analysis within the isogeometric analysis framework. Comput. Methods Appl. Mech. Eng. 2014, 273, 100–118. [Google Scholar] [CrossRef]
- Dittmann, M.; Aldakheel, F.; Schulte, J.; Wriggers, P.; Hesch, C. Variational phase-field formulation of non-linear ductile fracture. Comput. Methods Appl. Mech. Eng. 2018, 342, 71–94. [Google Scholar] [CrossRef]
- Franke, M.; Hesch, C.; Dittmann, M. Phase-field approach to fracture for finite-deformation contact problems. PAMM 2016, 16, 123–124. [Google Scholar] [CrossRef] [Green Version]
- Pham, K.; Amor, H.; Marigo, J.J.; Maurini, C. Gradient damage models and their use to approximate brittle fracture. Int. J. Damage Mech. 2011, 20, 618–652. [Google Scholar] [CrossRef]
- Gerasimov, T.; De Lorenzis, L. On penalization in variational phase-field models of brittle fracture. arXiv 2018, arXiv:1811.05334. [Google Scholar] [CrossRef]
- Amor, H.; Marigo, J.J.; Maurini, C. Regularized formulation of the variational brittle fracture with unilateral contact: Numerical experiments. J. Mech. Phys. Solids 2009, 57, 1209–1229. [Google Scholar] [CrossRef]
- Ambati, M.; Gerasimov, T.; De Lorenzis, L. A review on phase-field models of brittle fracture and a new fast hybrid formulation. Comput. Mech. 2015, 55, 383–405. [Google Scholar] [CrossRef]
- Wu, J.Y. A unified phase-field theory for the mechanics of damage and quasi-brittle failure. J. Mech. Phys. Solids 2017, 103, 72–99. [Google Scholar] [CrossRef]
- Bourdin, B.; Francfort, G.A.; Marigo, J.J. Numerical experiments in revisited brittle fracture. J. Mech. Phys. Solids 2000, 48, 797–826. [Google Scholar] [CrossRef]
- Karma, A.; Kessler, D.A.; Levine, H. Phase-field model of mode III dynamic fracture. Phys. Rev. Lett. 2001, 87, 045501. [Google Scholar] [CrossRef] [PubMed]
- Kuhn, C.; Schlüter, A.; Müller, R. On degradation functions in phase field fracture models. Comput. Mater. Sci. 2015, 108, 374–384. [Google Scholar] [CrossRef]
- Lorentz, E.; Cuvilliez, S.; Kazymyrenko, K. Modelling large crack propagation: From gradient damage to cohesive zone models. Int. J. Fract. 2012, 178, 85–95. [Google Scholar] [CrossRef]
- Alessi, R.; Marigo, J.J.; Vidoli, S. Gradient damage models coupled with plasticity: Variational formulation and main properties. Mech. Mater. 2015, 80, 351–367. [Google Scholar] [CrossRef]
- Bellettini, G.; Coscia, A. Discrete approximation of a free discontinuity problem. Numer. Funct. Anal. Optim. 1994, 15, 201–224. [Google Scholar] [CrossRef]
- Hillerborg, A.; Modéer, M.; Petersson, P.E. Analysis of crack formation and crack growth in concrete by means of fracture mechanics and finite elements. Cem. Concr. Res. 1976, 6, 773–781. [Google Scholar] [CrossRef]
- Pham, K.; Ravi-Chandar, K.; Landis, C. Experimental validation of a phase-field model for fracture. Int. J. Fract. 2017, 205, 83–101. [Google Scholar] [CrossRef]
- Shao, Y.; Duan, Q.; Qiu, S. Adaptive consistent element-free Galerkin method for phase-field model of brittle fracture. Comput. Mech. 2019. [Google Scholar] [CrossRef]
- Chowdhury, M.S.; Song, C.; Gao, W. Highly accurate solutions and Padé approximants of the stress intensity factors and T-stress for standard specimens. Eng. Fract. Mech. 2015, 144, 46–67. [Google Scholar] [CrossRef]
- Wu, J.Y.; Nguyen, V.P.; Nguyen, C.T.; Sutula, D.; Bordas, S.; Sinaie, S. Phase field modeling of fracture. Adv. Appl. Mech. Multi-Scale Theory Comput. 2018, 53. in press. [Google Scholar]
- Winkler, B.J. Traglastuntersuchungen von Unbewehrten und Bewehrten Betonstrukturen auf der Grundlage eines Objektiven Werkstoffgesetzes Für Beton; Innsbruck University Press: Innsbruck, Austria, 2001. [Google Scholar]
- Gerasimov, T.; De Lorenzis, L. A line search assisted monolithic approach for phase-field computing of brittle fracture. Comput. Methods Appl. Mech. Eng. 2016, 312, 276–303. [Google Scholar] [CrossRef]
- Heister, T.; Wheeler, M.F.; Wick, T. A primal-dual active set method and predictor-corrector mesh adaptivity for computing fracture propagation using a phase-field approach. Comput. Methods Appl. Mech. Eng. 2015, 290, 466–495. [Google Scholar] [CrossRef] [Green Version]
- Singh, N.; Verhoosel, C.; De Borst, R.; Van Brummelen, E. A fracture-controlled path-following technique for phase-field modeling of brittle fracture. Finite Elem. Anal. Des. 2016, 113, 14–29. [Google Scholar] [CrossRef] [Green Version]
- Brun, M.K.; Wick, T.; Berre, I.; Nordbotten, J.M.; Radu, F.A. An iterative staggered scheme for phase field brittle fracture propagation with stabilizing parameters. arXiv 2019, arXiv:1903.08717. [Google Scholar]
- Nagaraja, S.; Elhaddad, M.; Ambati, M.; Kollmannsberger, S.; De Lorenzis, L.; Rank, E. Phase-field modeling of brittle fracture with multi-level hp-FEM and the finite cell method. Comput. Mech. 2017, 63, 1283–1300. [Google Scholar] [CrossRef]
- Patil, R.; Mishra, B.; Singh, I. An adaptive multiscale phase field method for brittle fracture. Comput. Methods Appl. Mech. Eng. 2018, 329, 254–288. [Google Scholar] [CrossRef]
- Gerasimov, T.; Noii, N.; Allix, O.; De Lorenzis, L. A non-intrusive global/local approach applied to phase-field modeling of brittle fracture. Adv. Model. Simul. Eng. Sci. 2018, 5, 14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kuhn, C.; Müller, R. Phase field simulation of thermomechanical fracture. Proc. Appl. Math. Mech. 2009, 9, 191–192. [Google Scholar] [CrossRef]
- Nguyen, V.P.; Lian, H.; Rabczuk, T.; Bordas, S. Modelling hydraulic fractures in porous media using flow cohesive interface elements. Eng. Geol. 2017, 225, 68–82. [Google Scholar] [CrossRef]
- Zhou, S.; Zhuang, X.; Rabczuk, T. Phase-field modeling of fluid-driven dynamic cracking in porous media. Comput. Methods Appl. Mech. Eng. 2019, 350, 169–198. [Google Scholar] [CrossRef]
- Wu, T.; Lorenzis, L.D. A phase-field approach to fracture coupled with diffusion. Comput. Methods Appl. Mech. Eng. 2016, 312, 196–223. [Google Scholar] [CrossRef]












































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Egger, A.; Pillai, U.; Agathos, K.; Kakouris, E.; Chatzi, E.; Aschroft, I.A.; Triantafyllou, S.P. Discrete and Phase Field Methods for Linear Elastic Fracture Mechanics: A Comparative Study and State-of-the-Art Review. Appl. Sci. 2019, 9, 2436. https://doi.org/10.3390/app9122436
Egger A, Pillai U, Agathos K, Kakouris E, Chatzi E, Aschroft IA, Triantafyllou SP. Discrete and Phase Field Methods for Linear Elastic Fracture Mechanics: A Comparative Study and State-of-the-Art Review. Applied Sciences. 2019; 9(12):2436. https://doi.org/10.3390/app9122436
Chicago/Turabian StyleEgger, Adrian, Udit Pillai, Konstantinos Agathos, Emmanouil Kakouris, Eleni Chatzi, Ian A. Aschroft, and Savvas P. Triantafyllou. 2019. "Discrete and Phase Field Methods for Linear Elastic Fracture Mechanics: A Comparative Study and State-of-the-Art Review" Applied Sciences 9, no. 12: 2436. https://doi.org/10.3390/app9122436
APA StyleEgger, A., Pillai, U., Agathos, K., Kakouris, E., Chatzi, E., Aschroft, I. A., & Triantafyllou, S. P. (2019). Discrete and Phase Field Methods for Linear Elastic Fracture Mechanics: A Comparative Study and State-of-the-Art Review. Applied Sciences, 9(12), 2436. https://doi.org/10.3390/app9122436