A Simplified Thermal Model and Online Temperature Estimation Method of Permanent Magnet Synchronous Motors


Abstract
:1. Introduction
2. Proposed Thermal Model
2.1. Simplified Lumped Parameter Thermal Model
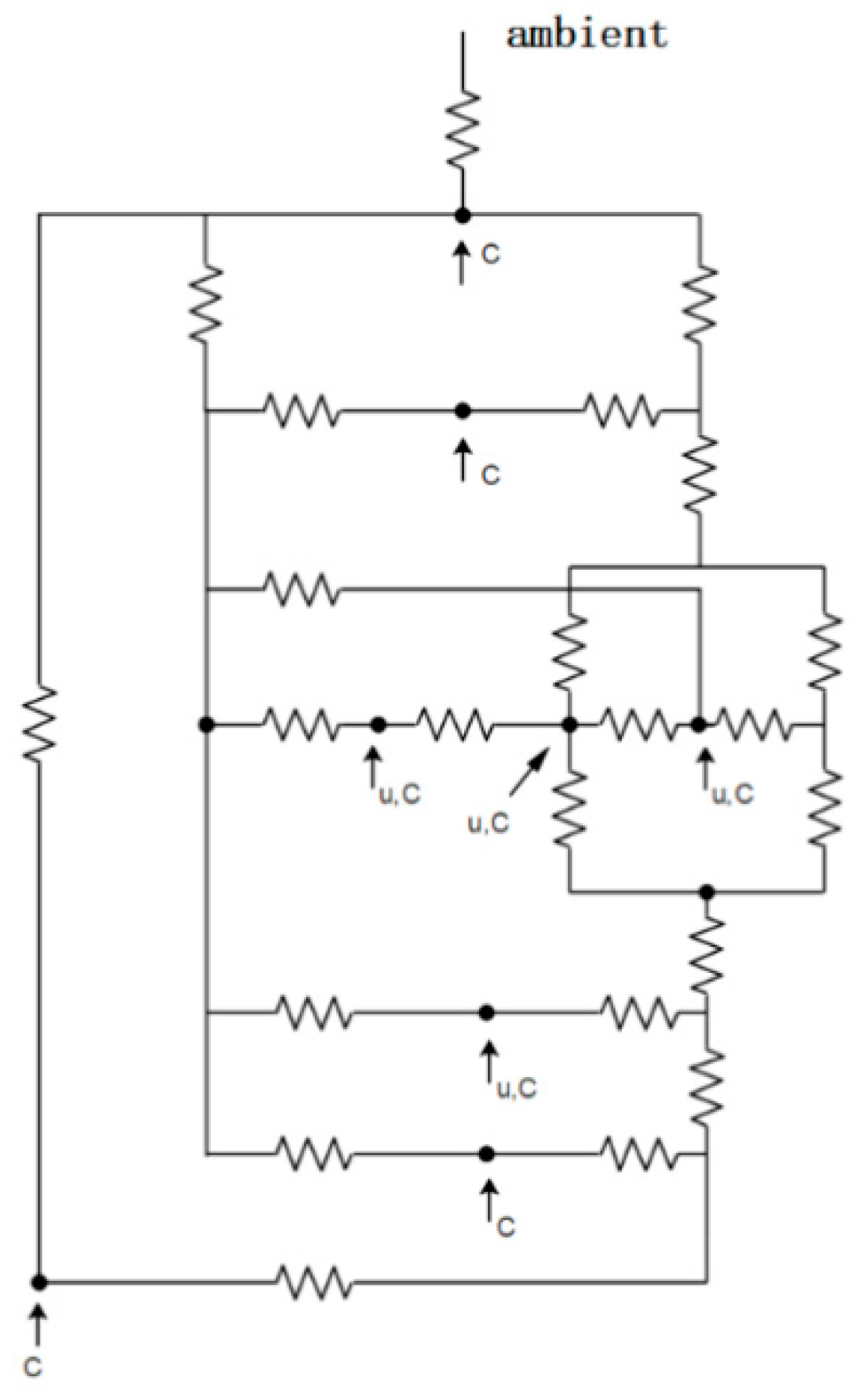
- Ignoring the contact resistance: In LPTN, the internal thermal resistance of the solid is mainly considered, and the contact thermal resistance between the solids is neglected. In fact, due to the influence of factors, such as installation, this part of the thermal resistance has a great impact on the radial heat flow.
- High dependence on the accuracy of the motor geometry model and the heat transfer characteristics of the material: In order to obtain an accurate motor model, a considerable number of motor dimensions and material-related parameters are required. In actual engineering practice, full material and geometric information is not available.
- The fluid model accuracy is not ideal: The model established for the internal air of the motor is based on the empirical formula of heat transfer theory. However, these formulas are sensitive to the size and shape of the air gap.
- Complex calculation, not suitable for online estimation: It can be found that the model order is too high due to the modeling of each part of the motor, leading to the large differential-algebraic-equation system.
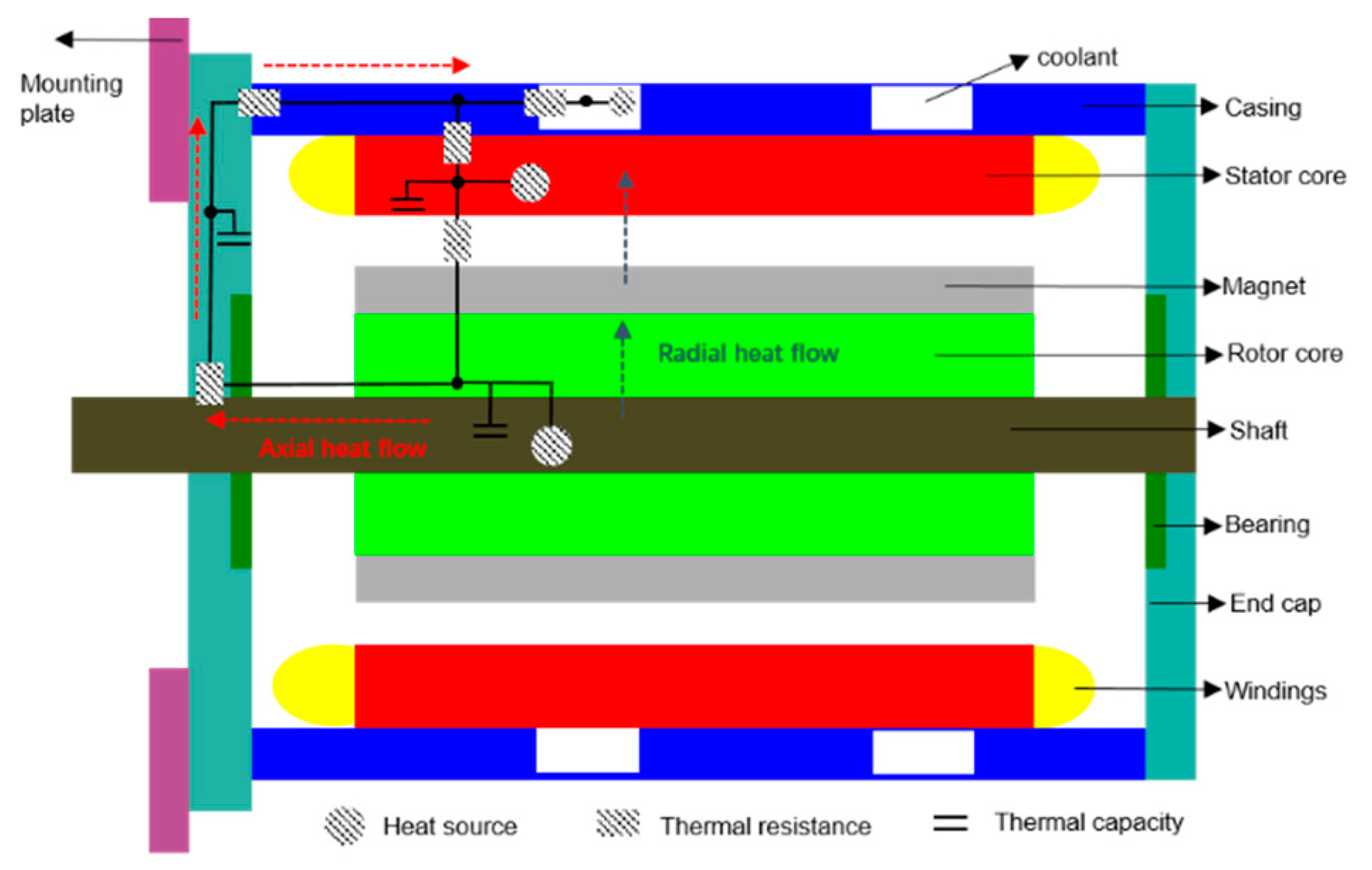
- The heat exchange between the coolant and the motor is much greater than the heat exchange between the casing and the environment. The coolant is the main way to exchange heat with the outside world in PMSMs, so the influence of the outside temperature is ignored. At the same time, the coolant is an important heat source outside the motor, which is collected by the motor controller under real vehicle conditions.
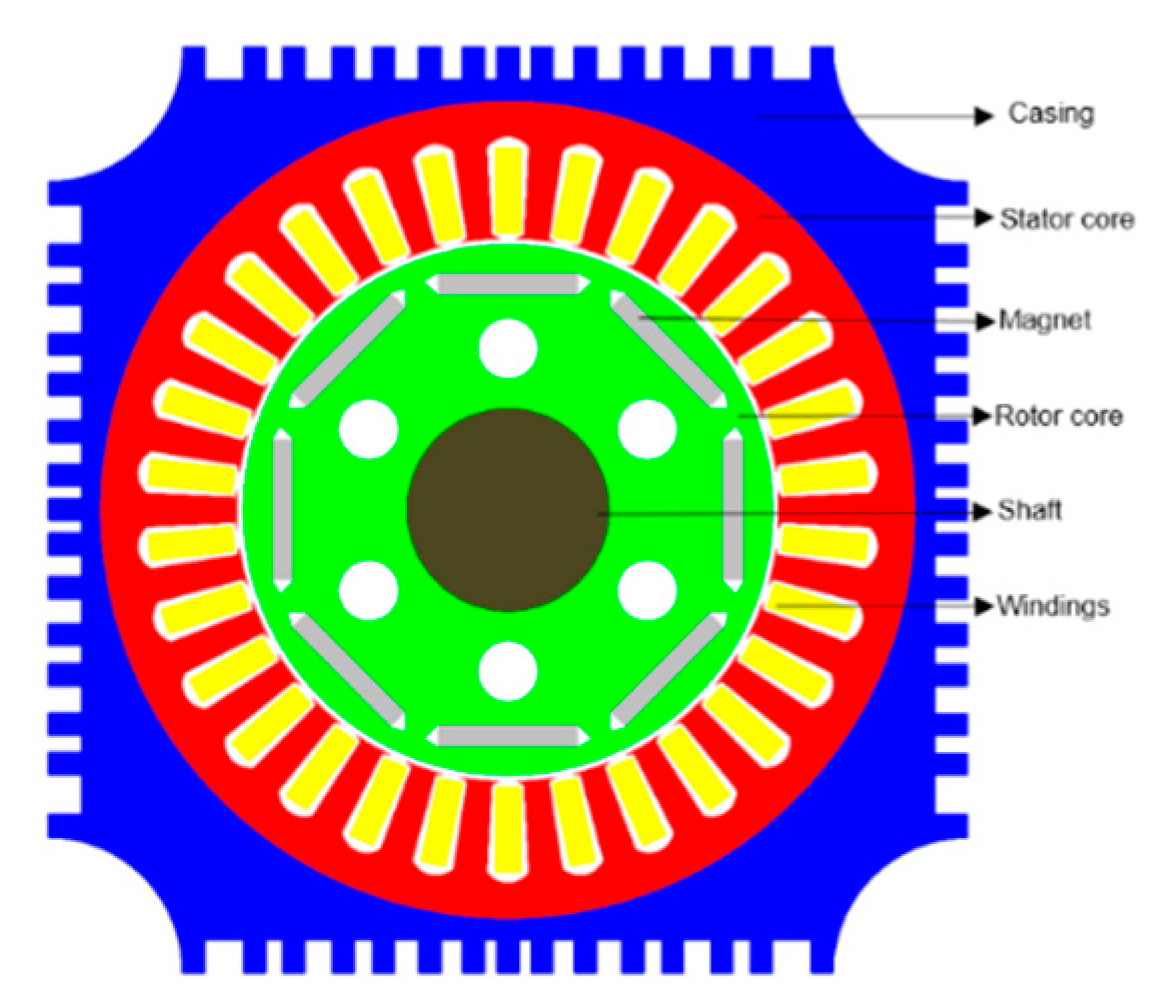
- The motor stator node consists of the stator core and stator windings. These parts are closely connected and have a complicated geometry. If it is treated as a node, the complexity of the model can be greatly simplified. Besides, the stator loss is also an important heat source inside the motor.
- The motor rotor node comprises the rotor core, permanent magnet, and motor shaft. This part is separated from the stator node with the air gap. The rotor iron loss is also an important internal heat source.
- The end cap and the casing are considered as two important nodes in connecting the axial and radial heat paths, making the thermal flow in a complete circuit.
- In water-cooled PMSMs, there is no rib on the motor rotor to increase the convection heat dissipation effect, and the heat transfer effect of the end air is greatly weakened. Thus, the axial heat transfer path through the end air to the end cap is neglected and the topology of the model is thus simplified. The heat path in the axial direction has been considered only in the shaft.
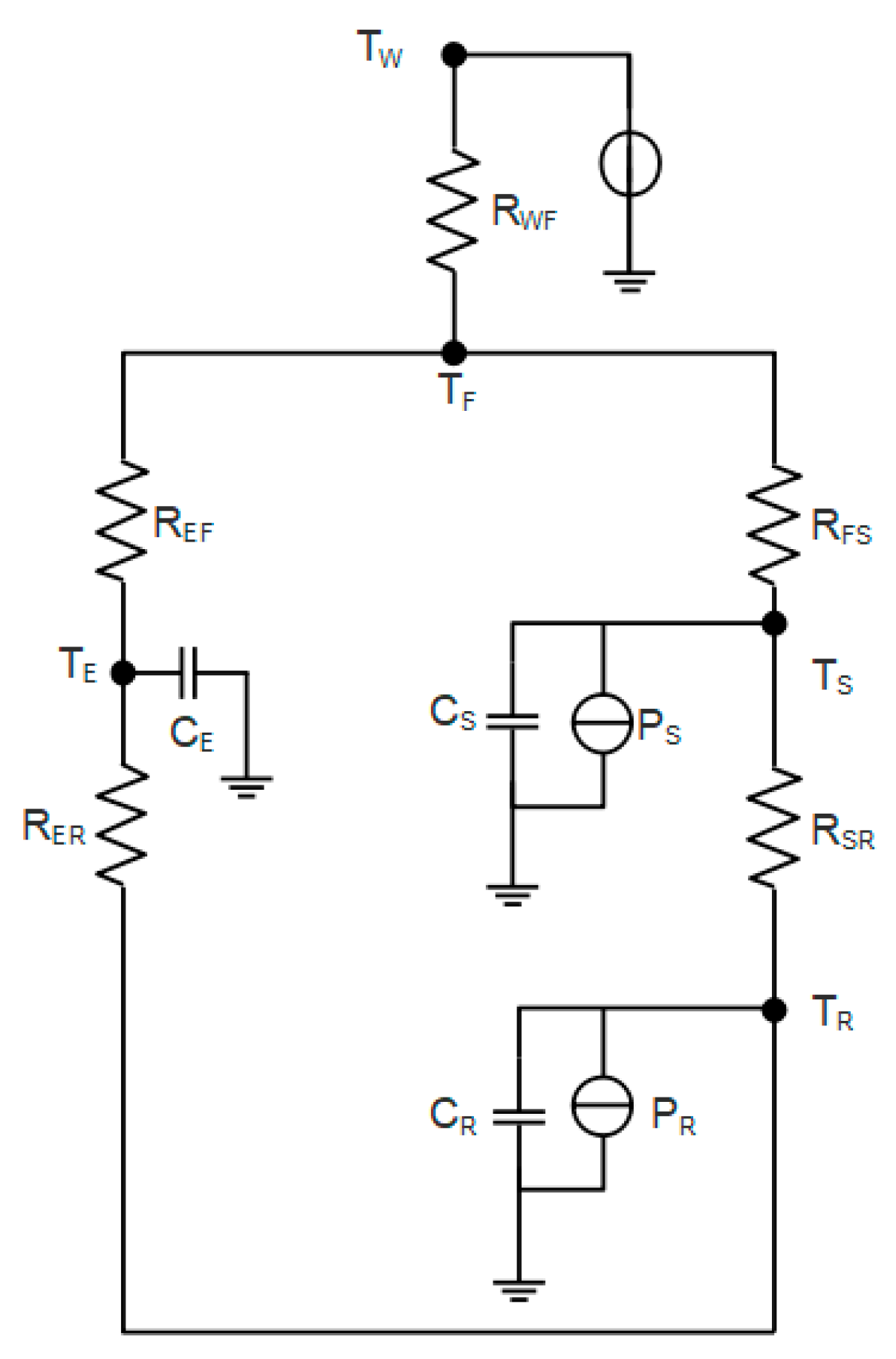
2.2. Mathematical Model of Proposed Thermal Model
| . |
3. Loss Calculation
3.1. Permanent Magnet Synchronous Motor Copper Loss Calculation Method
3.2. Iron Loss Online Calculation
4. Parameter Identification
5. Temperature Online Estimation
5.1. Temperature Estimation Algorithm Based on State Equation
5.2. Online Temperature Estimation Based on Kalman Filter Algorithm
6. Experimental Verification
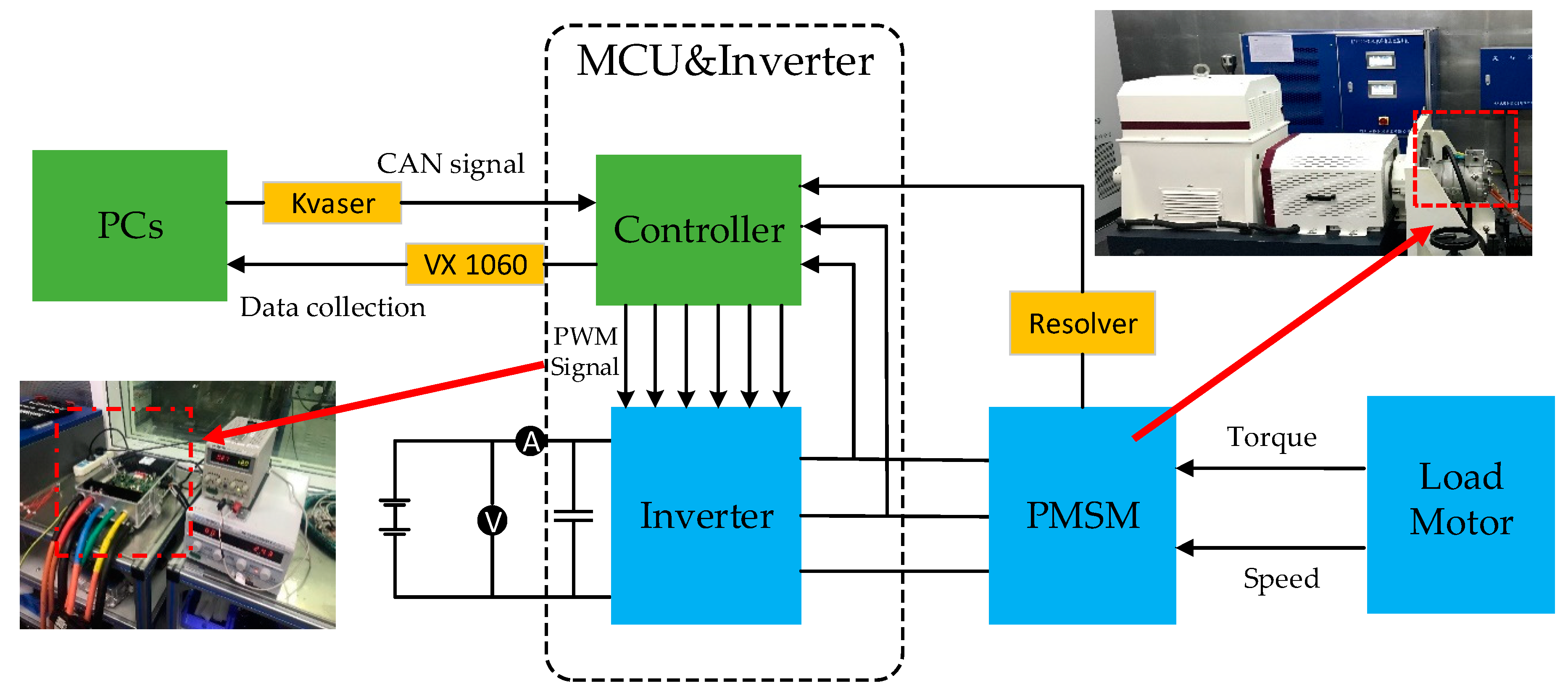
6.1. Experimental Platform
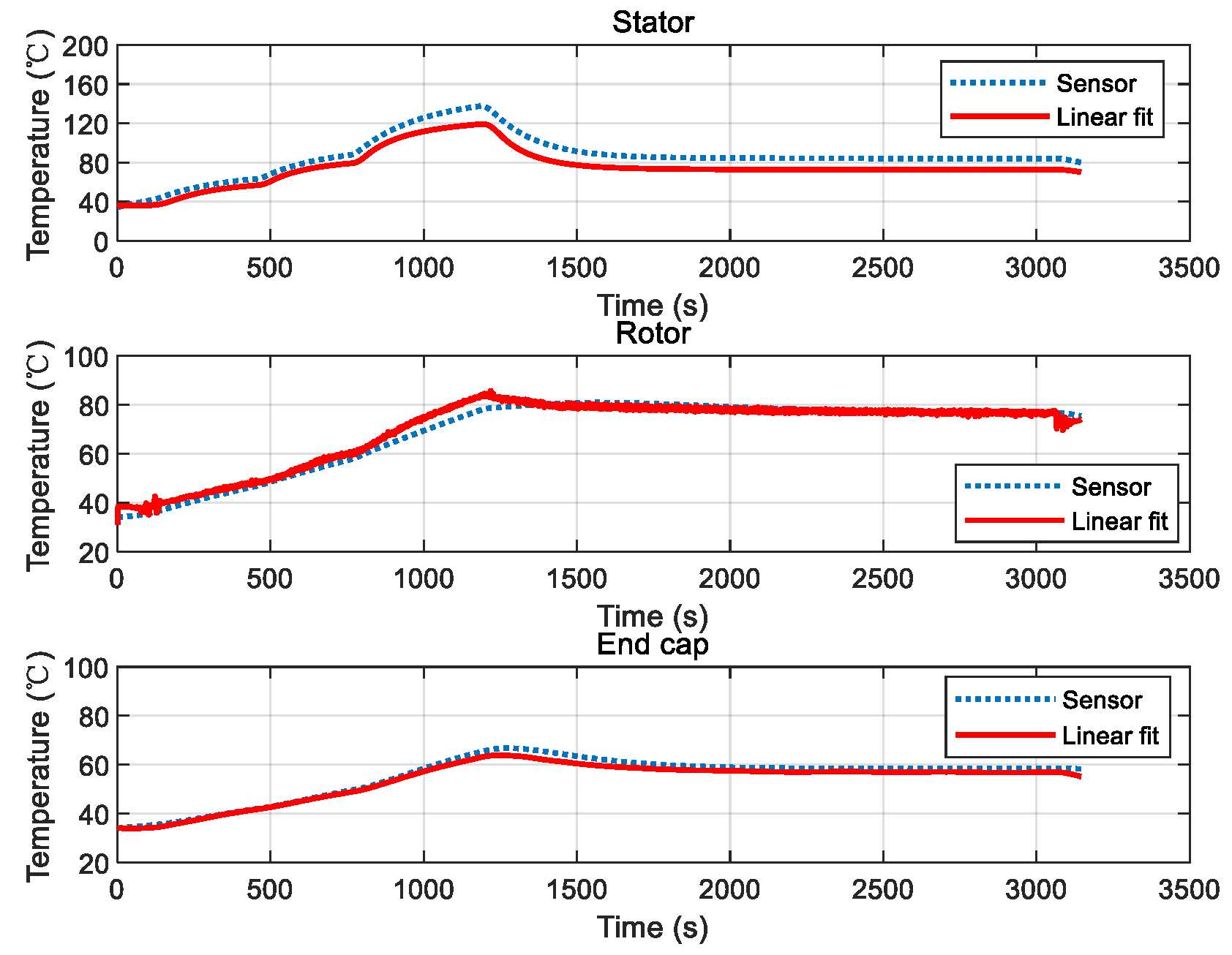
6.2. Parameter Identification at Fixed Speeds
6.3. Temperature Estimation Under Complex Conditions
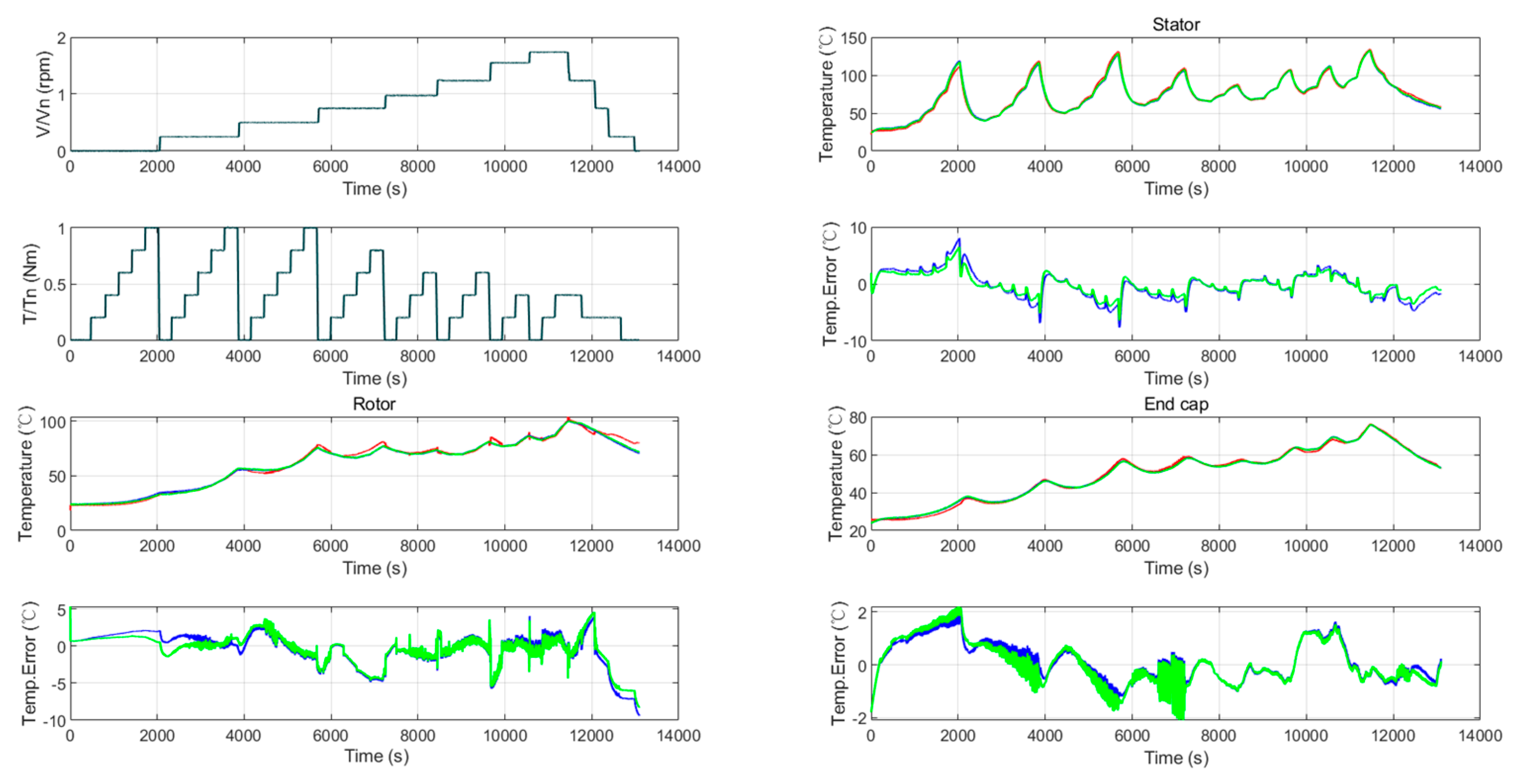
- By comparing the temperature estimation results, it was found that the stator, rotor, and end cap temperatures change with different operation conditions. Figure 9 shows that as the speed increases, the temperature of the rotor and end cap increases. During each period of torque change, the temperature will fluctuate, but the fluctuation range is not large within the range of 10 °C. Regarding the stator temperature variation, the temperature rises when the motor accelerates; but during each period of torque change, the temperature fluctuates greatly. When the range of torque change reduces, temperature fluctuations also decrease. Before 6000 s, the torque fluctuation changes in the range of 0–5 Nm, and the fluctuation range of the stator temperature exceeds 70 °C. After the moment of 6000 s, the temperature fluctuation range is reduced to 30 °C as the torque fluctuation decreases. It shows that the variation of the torque fluctuation range has a greater influence on the estimation of the stator temperature but has less impact on the rotor and end cap temperature estimation. This is because when the torque is large, the current also becomes large. According to Equations (8) and (9), the change of the current and speed will result in variation of the stator and rotor loss. In addition, the change of working conditions will also lead to changes in the thermal resistance and capacity of the thermal model, so the motor temperature change is the result of multiple parameters. Thus, by establishing a lumped parameter network thermal model of the motor, the change in motor temperature can be accurately predicted.
- From Figure 9, it can be seen that at the moment of sudden torque change, the temperature waveform will have a sharp peak, and the thermal model can quickly respond to the change of the working condition. The difference between the estimated temperature and the measured temperature will not exceed 10 °C at the moment of change. Therefore, the equivalent thermal model proposed in this paper has good robustness and observation accuracy.
- For the temperature estimation in PMSMs, the rotor temperature is critical, since the rotor temperature is not easily available to sensors. The results show that the rotor temperature error is within a range of ±5 °C in most cases, which indicates the improved prediction accuracy of the proposed model. Regarding the stator temperature estimation, at the moment, when the load condition changes, the error becomes large, but the proposed model can quickly follow the temperature change, resulting in a reduction of error. The rapid response ability shows that the proposed model has a better robustness. Besides, when the fluctuation of the load reduces, the accuracy will increase. Except for moments when the load condition changes sharply, the steady error of the stator temperature estimation was observed to be around 0 °C. The temperature error is smaller regarding the end cap, with a variation of 2 °C.
- The estimation performance of the state equation estimation and the Kalman filter algorithm was compared. As for the stator and rotor, the temperature error of the Kalman filter method is smaller than that of state equation estimation. The reason lies in the fact that the state equation estimation method adopts an open-loop structure, and the temperature prediction error is easy to accumulate over time. Since the estimation error of the end cap is smaller by only around 2 °C, the performance of these two methods can be thought to be the same.
- In the experiment, the temperature estimation error may result from the following reasons: The temperature measurement device is affected by the interference of the motor itself; the thermal model comes from the simplification of LPTN; and the open-loop estimation error based on the state equation is susceptible to time accumulation.
7. Conclusions
- The proposed lumped parameter network model is simple, and the thermal model order is low. Therefore, it is easier and faster to implement online estimation in an embedded system. Besides, both the radial and axial heat transfer paths inside the motor were considered, and minimum thermal nodes were applied to model the complete thermal circuit. In this way, the accuracy of thermal model was improved.
- The multiple linear regression algorithm was utilized to identify the parameters of the state equation. This method does not depend on the structural parameters of the motor. It is not necessary to identify each specific parameter in the thermal model, and only the parameters in the state equation need to be identified.
- The temperature estimation algorithm based on the state equation was used to predict the motor temperature. However, the disadvantage of this method is that error easily accumulates over time based on an open-loop structure. Thus, the Kalman filter algorithm was proposed to estimate the motor temperature online. The experimental results showed that the temperature estimation error does not exceed ±5 °C in most cases, which indicates that the proposed model can accurately predict the stator, rotor, and end cap temperature of the motor. The experimental results also verified the accuracy and effectiveness of the parameter identification algorithm and temperature estimation algorithm.
Author Contributions
Funding
Conflicts of Interest
References
- Pietrusewicz, K.; Waszczuk, P.; Kubicki, M. MFC/IMC Control Algorithm for Reduction of Load Torque Disturbance in PMSM Servo Drive Systems. Appl. Sci. 2018, 9, 86. [Google Scholar] [CrossRef]
- Mehrjou, M.R.; Mariun, N.; Misron, N.; Radzi, M.A.M.; Musa, S. Broken Rotor Bar Detection in LS-PMSM Based on Startup Current Analysis Using Wavelet Entropy Features. Appl. Sci. 2017, 7, 845. [Google Scholar] [CrossRef]
- Liang, H.; Chen, Y.; Liang, S.; Wang, C. Fault Detection of Stator Inter-Turn Short-Circuit in PMSM on Stator Current and Vibration Signal. Appl. Sci. 2018, 8, 1677. [Google Scholar] [CrossRef]
- Boglietti, A.; Cavagnino, A.; Lazzari, M.; Pastorelli, M. A simplified thermal model for variable-speed self-cooled industrial induction motor. IEEE Trans. Ind. Appl. 2003, 39, 945–952. [Google Scholar] [CrossRef]
- Boglietti, A.; Cavagnino, A.; Staton, D.; Shanel, M.; Mueller, M.; Mejuto, C. Evolution and Modern Approaches for Thermal Analysis of Electrical Machines. IEEE Trans. Ind. Electron. 2009, 56, 871–882. [Google Scholar] [CrossRef]
- Boglietti, A.; Popescu, M.; Staton, D.; Cavagnino, A. Thermal Model and Analysis of Wound-Rotor Induction Machine. IEEE Trans. Ind. Appl. 2013, 49, 2078–2085. [Google Scholar] [CrossRef]
- Zhang, B.; Qu, R.; Wang, J.; Xu, W.; Fan, X.; Chen, Y. Thermal Model of Totally Enclosed Water Cooled Permanent Magnet Synchronous Machines for Electric Vehicle Applications. IEEE Trans. Ind. Appl. 2015, 51, 1. [Google Scholar] [CrossRef]
- Gao, Z.; Colby, R.S.; Habetler, T.G.; Harley, R.G. A Model Reduction Perspective on Thermal Models for Induction Machine Overload Relays. IEEE Trans. Ind. Electron. 2008, 55, 3525–3534. [Google Scholar] [CrossRef]
- Dorrell, D.; Dorrell, D. Combined Thermal and Electromagnetic Analysis of Permanent-Magnet and Induction Machines to Aid Calculation. IEEE Trans. Ind. Electron. 2008, 55, 3566–3574. [Google Scholar] [CrossRef]
- Alberti, L.; Bianchi, N. A Coupled Thermal–Electromagnetic Analysis for a Rapid and Accurate Prediction of IM Performance. IEEE Trans. Ind. Electron. 2008, 55, 3575–3582. [Google Scholar] [CrossRef]
- Reigosa, D.D.; Garcia, P.; Briz, F.; Raca, D.; Lorenz, R. Modeling and Adaptive Decoupling of High-Frequency Resistance and Temperature Effects in Carrier-Based Sensorless Control of PM Synchronous Machines. IEEE Trans. Ind. Appl. 2010, 46, 139–149. [Google Scholar] [CrossRef]
- Reigosa, D.D.; Briz, F.; García, P.; Guerrero, J.M.; Degner, M. Magnet temperature estimation in surface PM machines using high frequency signal injection. IEEE Trans. Ind. Appl. 2009, 46, 1468–1475. [Google Scholar] [CrossRef]
- Reigosa, D.D.; García, P.; Briz, F.; Raca, D.; Lorenz, R.D. Modeling and Adaptive Decoupling of Transient Resistance and Temperature Effects in Carrier-Based Sensorless Control of PM Synchronous Machines. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–8. [Google Scholar]
- Ganchev, M.; Kral, C.; Wolbank, T. Sensorless Rotor Temperature Estimation of Permanent Magnet Synchronous Motor under Load Conditions. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society (IECON 2012), Montreal, QC, Canada, 25–28 October 2012; pp. 1999–2004. [Google Scholar]
- Qu, R.; Fan, X.; Li, J.; Li, D.; Zhang, B.; Wang, C. Ventilation and Thermal Improvement of Radial Forced Air-Cooled FSCW Permanent Magnet Synchronous Wind Generators. IEEE Trans. Ind. Appl. 2017, 53, 3447–3456. [Google Scholar]
- Lu, Y.; Liu, L.; Zhang, D. Simulation and Analysis of Thermal Fields of Rotor Multislots for Nonsalient-Pole Motor. IEEE Trans. Ind. Electron. 2015, 62, 7678–7686. [Google Scholar] [CrossRef]
- Camilleri, R.; Howey, D.A.; McCulloch, M.D. Predicting the Temperature and Flow Distribution in a Direct Oil-Cooled Electrical Machine with Segmented Stator. IEEE Trans. Ind. Electron. 2016, 63, 82–91. [Google Scholar] [CrossRef]
- Oliver, W.; Böcker, J. Global identification of a low-order lumped-parameter thermal network for permanent magnet synchronous motors. IEEE Trans. Energy Convers. 2015, 31, 354–365. [Google Scholar]
- Jaljal, N.; Trigeol, J.-F.; Lagonotte, P. Reduced Thermal Model of an Induction Machine for Real-Time Thermal Monitoring. IEEE Trans. Ind. Electron. 2008, 55, 3535–3542. [Google Scholar] [CrossRef]
- Kral, C.; Haumer, A.; Bin Lee, S. A Practical Thermal Model for the Estimation of Permanent Magnet and Stator Winding Temperatures. IEEE Trans. Power Electron. 2014, 29, 455–464. [Google Scholar] [CrossRef]
- Huber, T.; Peters, W.; Böcker, J. A Low-Order Thermal Model for Monitoring Critical Temperatures in Permanent Magnet Synchronous Motors. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014. [Google Scholar]
- Nerg, J.; Rilla, M.; Pyrhonen, J. Thermal Analysis of Radial-Flux Electrical Machines with a High Power Density. IEEE Trans. Ind. Electron. 2008, 55, 3543–3554. [Google Scholar] [CrossRef]
- Daniel, D.; Oliver, W.; Böcker, J. Global Identification Methods for Low-Order Lumped-Parameter Thermal Networks Used in Permanent Magnet Synchronous Motors. In Proceedings of the 2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), Honolulu, HI, USA, 12–15 December 2017; pp. 126–133. [Google Scholar]
- Huber, T.; Peters, W.; Böcker, J. Monitoring critical temperatures in permanent magnet synchronous motors using low-order thermal models. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 1508–1515. [Google Scholar]
- Boseniuk, F.; Ponick, B. Parameterization of transient thermal models for permanent magnet synchronous machines exclusively based on measurements. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM 2014), Ischia, Italy, 18–20 June 2014; pp. 295–301. [Google Scholar]
- Demetriades, G.; De La Parra, H.; Andersson, E.; Olsson, H. A Real-Time Thermal Model of a Permanent-Magnet Synchronous Motor. IEEE Trans. Power Electron. 2010, 25, 463–474. [Google Scholar] [CrossRef]
- Fan, J.X.; Zhang, C.N.; Wang, Z.F. Thermal Analysis of Permanent Magnet Motor for the Electric Vehicle Application Considering Driving Duty Cycle. IEEE Trans. Magn. 2010, 46, 2493–2496. [Google Scholar] [CrossRef]
- Chen, Q.X.; Zou, Z.Y.; Cao, B.G. Lumped-Parameter Thermal Network Model and Experimental Research of Interior PMSM for Electric Vehicle. CES Trans. Electr. Mach. Syst. 2017, 3, 367–374. [Google Scholar]
- Lan, Z.Y.; Wei, X.C.; Chen, L.H. Thermal Analysis of PMSM Based on Lumped Parameter Thermal Network Method. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Mellor, P.H.; Turner, D.R. Real Time Prediction of Temperatures in an Induction Motor Using a Microprocessor. Electr. Mach. Power Syst. 1988, 15, 333–352. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| rated power | 42 Kw |
| rated torque | 100 Nm |
| rated speed | 4000 rpm |
| inductance in d-axis | 0.1425 mH |
| inductance in q-axis | 0.3359 mH |
| phase resistance | 0.016 Ω |
| poles | 4 |
| permanent magnet flux | 0.0566 Wb |
| Duration (min) | Torque (Nm) |
|---|---|
| 5 | 0 |
| 5 | 20 |
| 7 | 40 |
| 30 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Xiao, M.; Lu, K.; Wu, Z.; Tao, B. A Simplified Thermal Model and Online Temperature Estimation Method of Permanent Magnet Synchronous Motors. Appl. Sci. 2019, 9, 3158. https://doi.org/10.3390/app9153158
Zhu Y, Xiao M, Lu K, Wu Z, Tao B. A Simplified Thermal Model and Online Temperature Estimation Method of Permanent Magnet Synchronous Motors. Applied Sciences. 2019; 9(15):3158. https://doi.org/10.3390/app9153158
Chicago/Turabian StyleZhu, Yuan, Mingkang Xiao, Ke Lu, Zhihong Wu, and Ben Tao. 2019. "A Simplified Thermal Model and Online Temperature Estimation Method of Permanent Magnet Synchronous Motors" Applied Sciences 9, no. 15: 3158. https://doi.org/10.3390/app9153158
APA StyleZhu, Y., Xiao, M., Lu, K., Wu, Z., & Tao, B. (2019). A Simplified Thermal Model and Online Temperature Estimation Method of Permanent Magnet Synchronous Motors. Applied Sciences, 9(15), 3158. https://doi.org/10.3390/app9153158