Proposal of Laser-Induced Ultrasonic Guided Wave for Corrosion Detection of Reinforced Concrete Structures in Fukushima Daiichi Nuclear Power Plant Decommissioning Site


Abstract
:1. Introduction
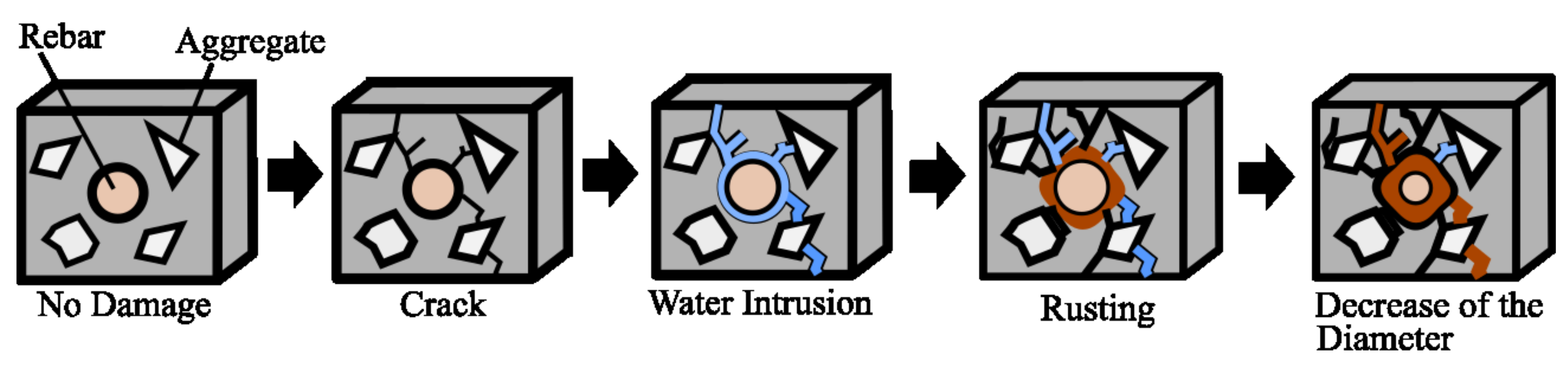
1.1. Background and Motivation
1.2. Methodology for Testing Reinforced Concrete Structures
2. Experimental and Analysis Method
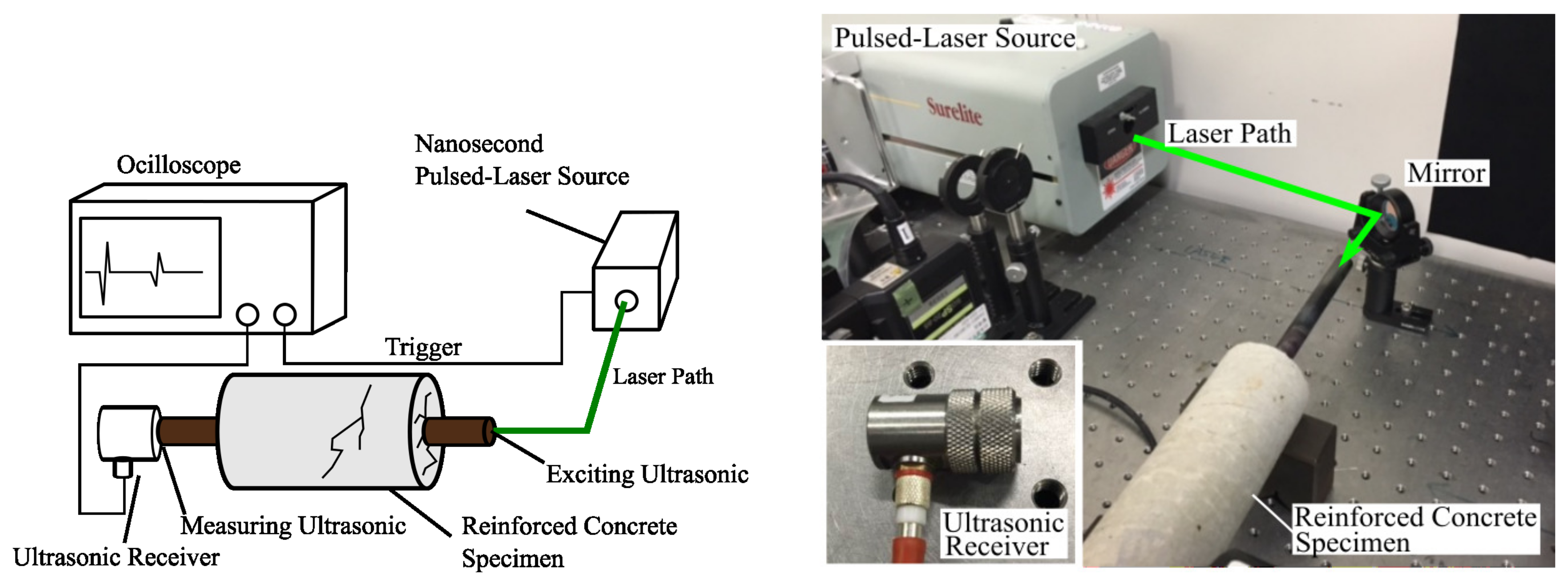
2.1. Setup and Procedure
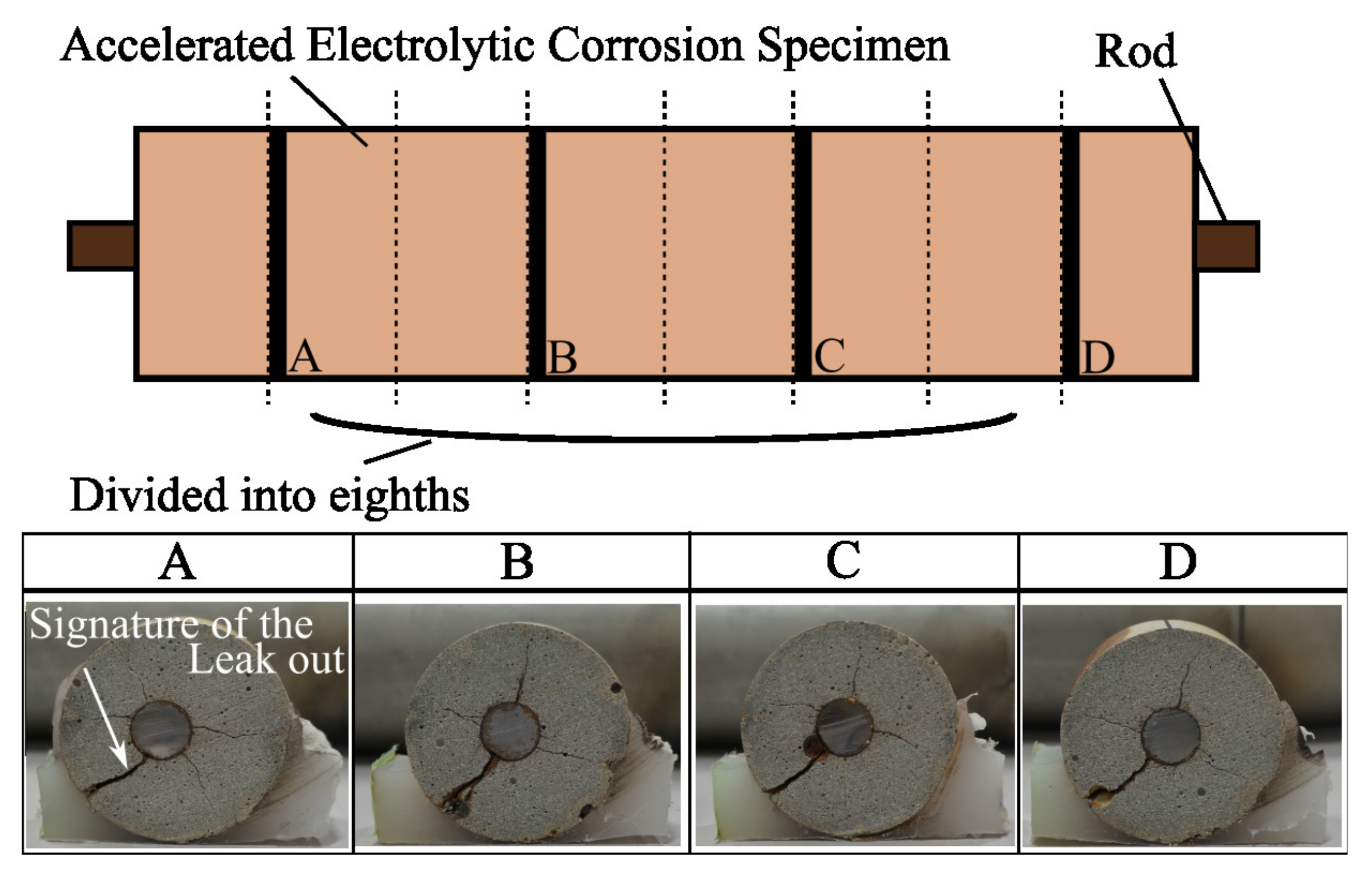
2.2. Reinforced Concrete Specimens
2.3. Signal Analysis Method
3. Results
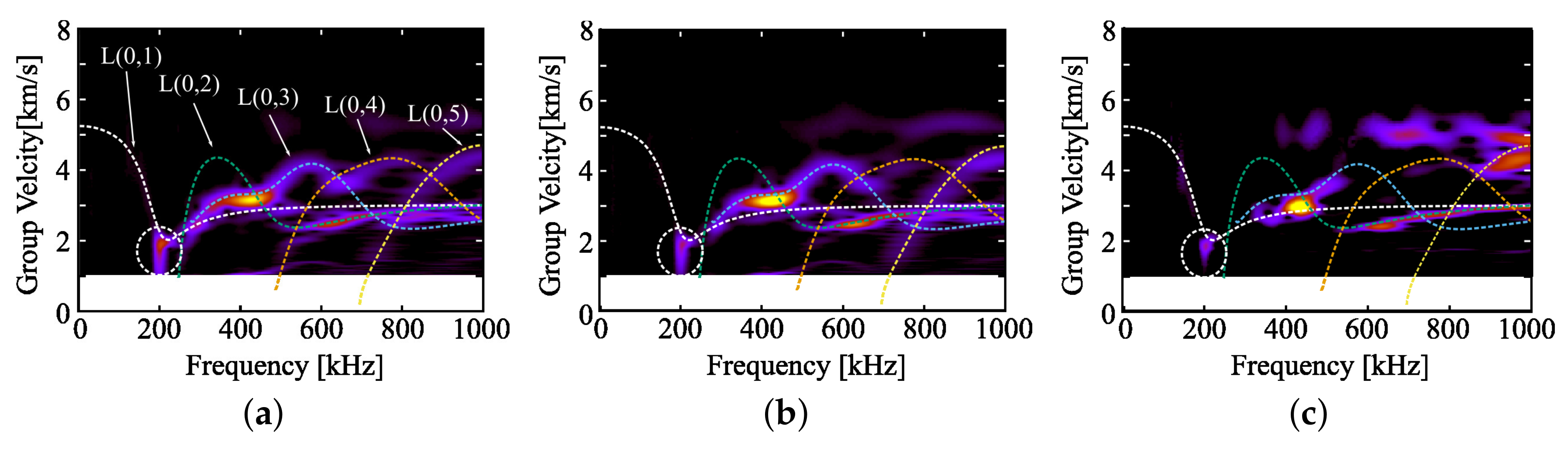
3.1. Result of Naked Steel Rod, Heated, and Intact Specimens
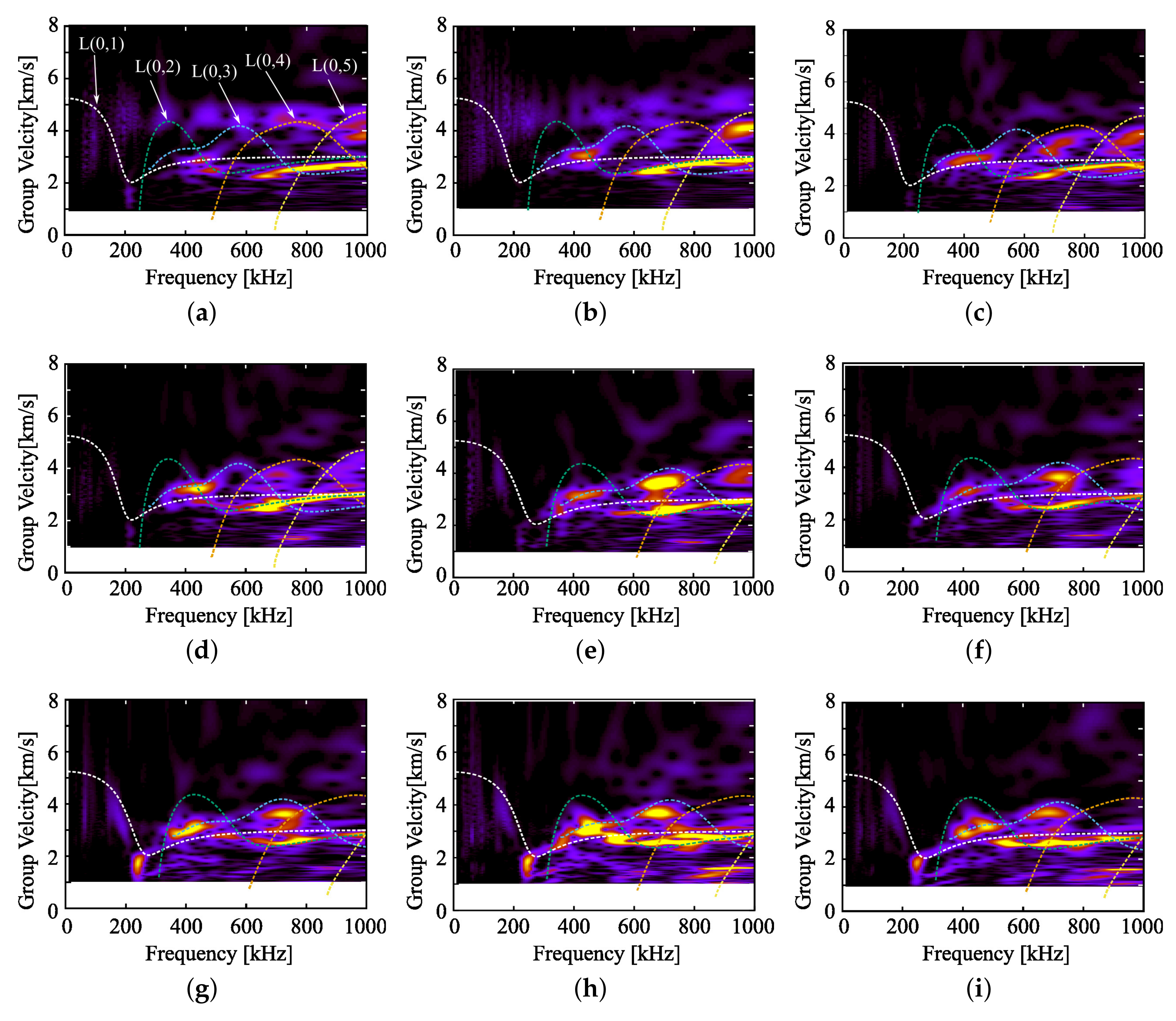
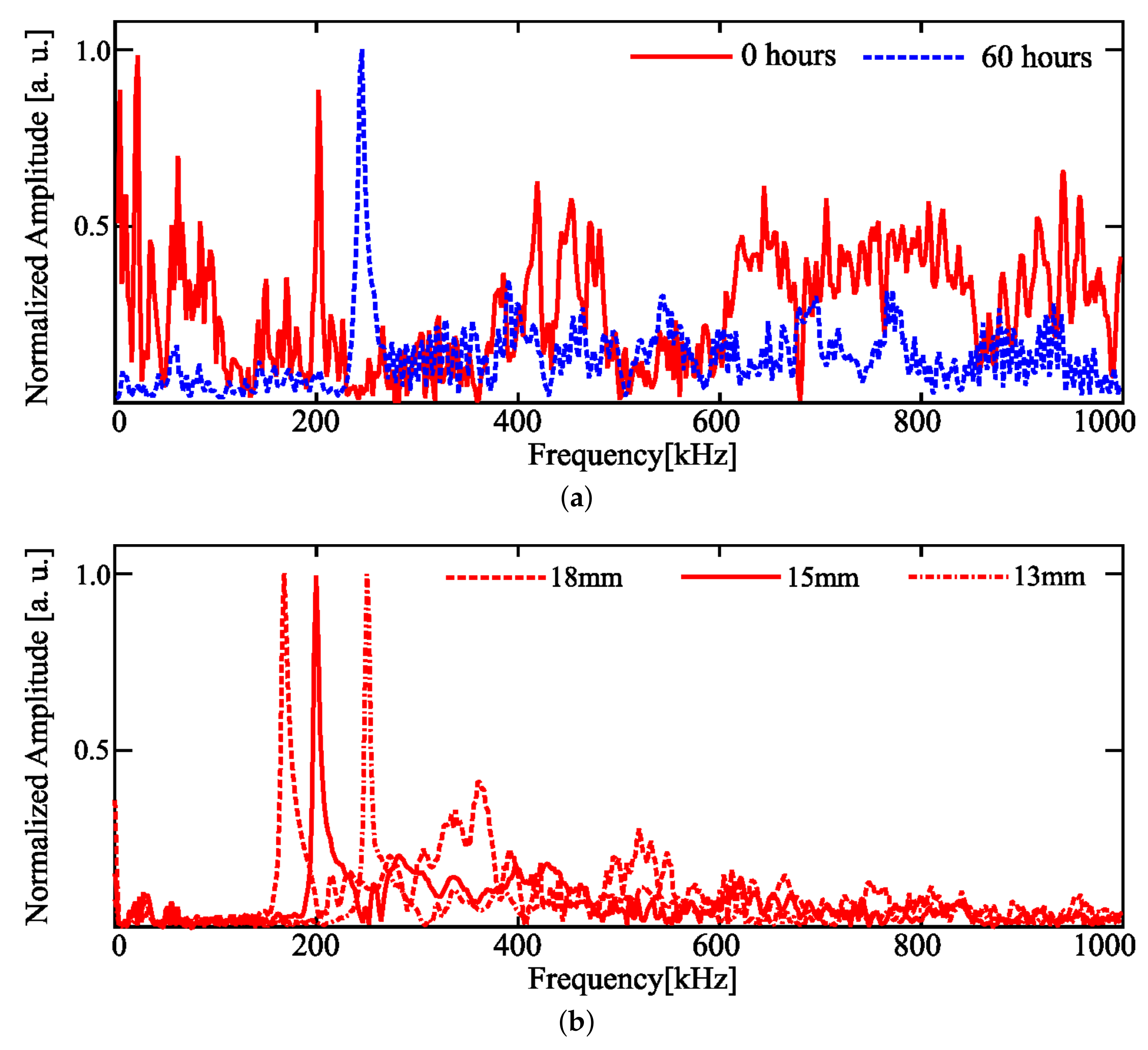
3.2. Waveform Change with Progress of the Accelerated Electrolytic Corrosion
4. Discussion
4.1. Changes in Waveform Due to the Presence of Bonding
4.2. Detectability of Corrosion in the Rebar
4.3. Peak Shift with Corrosion Progress
4.4. Summary of the Discussion and Future Works
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Tokyo Electric Power Company. INSIDE Fukushima Daiichi. Available online: http://www.tepco.co.jp/insidefukushimadaiichi/ (accessed on 1 June 2019).
- Tokyo Electric Power Company. Photo Collection January 2018. Available online: https://photo.tepco.co.jp/en/date/2018-e/201801-e.html/ (accessed on 1 June 2019).
- Furusawa, A.; Nishimura, A.; Takenaka, Y.; Nakamura, K. An Approach for Remote Non-destructive Testing Method for Concrete Structure using Laser Generated Ultrasonic. In Proceedings of the 54th Annual meeting on Hot Laboratories and Remote Handling (HOTLAB 2017), Mito, Japan, 17–22 September 2017. [Google Scholar]
- Furusawa, A.; Nishimura, A.; Takenaka, Y.; Muramatsu, T. Potential for Remote Controllable Systematization of the Method of Testing Reinforced Concrete using Guided-wave on Rebar. In Proceedings of the International Topical Workshop on Fukushima Decommissioning Research (FDR2019), Fukushima, Japan, 24–26 May 2019. [Google Scholar]
- Na, W.B.; Kundu, T.; Ehsani, M. Ultrasonic Guided Waves for Steel Bar-Concrete Interface Testing. Mater. Eval. 2002, 60, 437–444. [Google Scholar]
- Na, W.B.; Kundu, T. A Combination of PZT and EMAT Transducers for Interface Inspection. J. Acoust. Soc. Am. 2002, 111, 2128–2139. [Google Scholar] [CrossRef] [PubMed]
- Na, W.B.; Kundu, T.; Ehsani, M. A Comparison of Steel/Concrete and Glass Fiber Reinforced Polymers/Concrete Interface Testing by Guided Waves. Mater. Eval. 2003, 61, 155–161. [Google Scholar]
- Na, W.B.; Kundu, T.; Ehsani, M. Lamb Waves for Detecting Delamination between Steel Bars and Concrete. Comput.-Aided Civ. Infrastruct. Eng. 2003, 18, 58–63. [Google Scholar] [CrossRef]
- Miller, T.H.; Kundu, T.; Huang, J.; Grill, J.Y. A new guided wave-based technique for corrosion monitoring in reinforced concrete. Struct. Health Monit. 2013, 12, 35–47. [Google Scholar] [CrossRef]
- Zima, B. Guided Wave Propagation in Detection of Partial Circumferential Debonding in Concrete Structures. Sensors 2019, 19, 2199. [Google Scholar] [CrossRef] [PubMed]
- Kurahashi, S.; Mikami, K.; Kitamura, T.; Hasegawa, N.; Okada, H.; Kondo, S.; Nishikino, M.; Kawauchi, T.; Shimada, Y. Demonstration of 25-Hz-inspection speed laser remote sensing for internal concrete defects. J. Appl. Remote Sens. 2018, 12, 015009. [Google Scholar] [CrossRef]
- Akamatsu, R.; Sugimoto, T.; Utagawa, N.; Katakura, K. Proposal of Non Contact Inspection Method for Concrete Structures Using High-Power Directional Sound Source and Scanning Laser Doppler Vibrometer. Jpn. J. Appl. Phys. 2013, 52, 07HC12. [Google Scholar] [CrossRef]
- Scruby, C.B.; Drain, L.E. Laser Ultrasonics Techniques and Applications; Taylor & Francis: New York, NY, USA, 1990; ISBN 978-18-4569-735-8. [Google Scholar]
- Ngugen, P.L.; Daido, H.; Yamada, T.; Nishimura, A.; Hasegawa, N.; Kawachi, T. Experimental characterization of concrete removal by high-power quasicontinuous wave fiber laser irradiation. J. Laser Appl. 2017, 29, 041501. [Google Scholar]
- Rose, J.L. Ultrasonic Waves in Solid Media; Cambridge University Press: Cambridge, UK, 1999; ISBN 978-05-2154-889-2. [Google Scholar]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014; ISBN 978-11-0704-895-9. [Google Scholar]
- Rose, J.L. A baseline and vision of ultrasonic guided wave inspection potential. J. Press. Vessel Technol. 2002, 124, 273–282. [Google Scholar] [CrossRef]
- Mallat, S. A Wavelet Tour of Signal Processing, Third Edition: The Sparse Way; Academic Press: Orlando, FL, USA, 2008; ISBN 978-012-3743-70-1. [Google Scholar]
- Francesco, L.S.; McNamara, J. Wavelet Transform for Characterizing Longitudinal and Lateral Transient Vibrations of Railroad Tracks. Res. Nondestruct. Eval. 2004, 15, 87–98. [Google Scholar]
- Kishimoto, K.; Inoue, M.; Shibuya, T. Time Frequency Analysis of Dispersive Waves by Means of Wavelet Transform. J. Appl. Mech. 1995, 62, 841–846. [Google Scholar] [CrossRef]
- Waltisberg, D.; Raišutis, R. Group velocity estimation of Lamb waves based on the wavelet transform. Ultragarsas 2008, 63, 35–40. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser Spot Diameter | Pulse Width | Wave Length | Laser Power | Beam Profile |
|---|---|---|---|---|
| 5 mm | 10 nsec | 1064 nm | 14 mJ/pulse | Gaussian |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Furusawa, A.; Takenaka, Y.; Nishimura, A. Proposal of Laser-Induced Ultrasonic Guided Wave for Corrosion Detection of Reinforced Concrete Structures in Fukushima Daiichi Nuclear Power Plant Decommissioning Site. Appl. Sci. 2019, 9, 3544. https://doi.org/10.3390/app9173544
Furusawa A, Takenaka Y, Nishimura A. Proposal of Laser-Induced Ultrasonic Guided Wave for Corrosion Detection of Reinforced Concrete Structures in Fukushima Daiichi Nuclear Power Plant Decommissioning Site. Applied Sciences. 2019; 9(17):3544. https://doi.org/10.3390/app9173544
Chicago/Turabian StyleFurusawa, Akinori, Yusuke Takenaka, and Akihiko Nishimura. 2019. "Proposal of Laser-Induced Ultrasonic Guided Wave for Corrosion Detection of Reinforced Concrete Structures in Fukushima Daiichi Nuclear Power Plant Decommissioning Site" Applied Sciences 9, no. 17: 3544. https://doi.org/10.3390/app9173544
APA StyleFurusawa, A., Takenaka, Y., & Nishimura, A. (2019). Proposal of Laser-Induced Ultrasonic Guided Wave for Corrosion Detection of Reinforced Concrete Structures in Fukushima Daiichi Nuclear Power Plant Decommissioning Site. Applied Sciences, 9(17), 3544. https://doi.org/10.3390/app9173544