UAV-Based Air Pollutant Source Localization Using Combined Metaheuristic and Probabilistic Methods †




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The air pollutant plume localization and
- The tracing of the pollutant plume towards the source.
2. Pollutant Distribution Model
- Conservation of numbers of particles; and
- The relation between the flux and the density.
3. Solution Approach
- The targeted environment is limited to a rectangular area in the horizontal space;
- There is only one source releasing the pollutant;
- The UAV starts the mission in an arbitrary position on the targeted environment, without information of the plume of pollutant;
- The UAV has one sensor for the pollutant measurements;
- It is possible to estimate the vector of the winds in the horizontal plane;
- The variations of the winds do not affect considerably the control of positioning (navigation) of the UAV;
- The flying time of the vehicle and the capacity of memory and processing onboard of the vehicle are limited.
- The algorithm generates waypoints to guide the UAV towards the pollutant source location;
- Minimal distances among the waypoints generated by the algorithm are required, hereafter called waypoints resolution. This property will help the UAV to use some strategy of path planning and trajectory planning, to navigate among the waypoints, when the environment has obstacles. Also, as the conventional GPS devices present low resolution, the UAV outdoor navigation could be difficult if the waypoints generated by the algorithm are very close between them; and
- The precise localization of the source could turn unfeasible in many times, or even the mission can fail in reaching the pollutant plume. Despite this fact, given the captured pollutant and wind information, the system must be able to provide the most probable areas of location of the source.
4. Plume Tracing Algorithm
- the UAV starts to navigate inside the pollutant plume;
- unlike a general operation of a metaheuristic, its implementation to trace the plume of pollutant using a UAV is limited to explore new positions near to the current position of the vehicle, given its constrains;
- the UAV cannot reach instantaneously the positions calculated by the algorithm, although it can capture useful information while navigates towards those positions;
- continuous rotations of the UAV are undesirable, since it consumes energy, needed to explore alternative spaces; and
- the number of the iterations for the search is limited by the UAV battery.
4.1. Metaheuristic Algorithms
| = current and calculated positions of the vehicle; | |
| = current vehicle velocity vector; | |
| = new arbitrary velocity vector; | |
| = waypoints resolution, which can be any real number, and its value will depend of the resolution of the GPS used; | |
| = waypoints resolution of alternative movements of the UAV; | |
| = current and arbitrary velocities to avoid the directions of the Tabu list; and | |
| = current and arbitrary velocities to include the velocity component towards the position of higher concentration of the contaminant. |
4.2. Model of the UAV
- the UAV has a limited battery charge; and
- the vehicle is restricted to move with a constant velocity v. This velocity is not affected by the wind, but the UAV spends more energy to maintain v as constant.
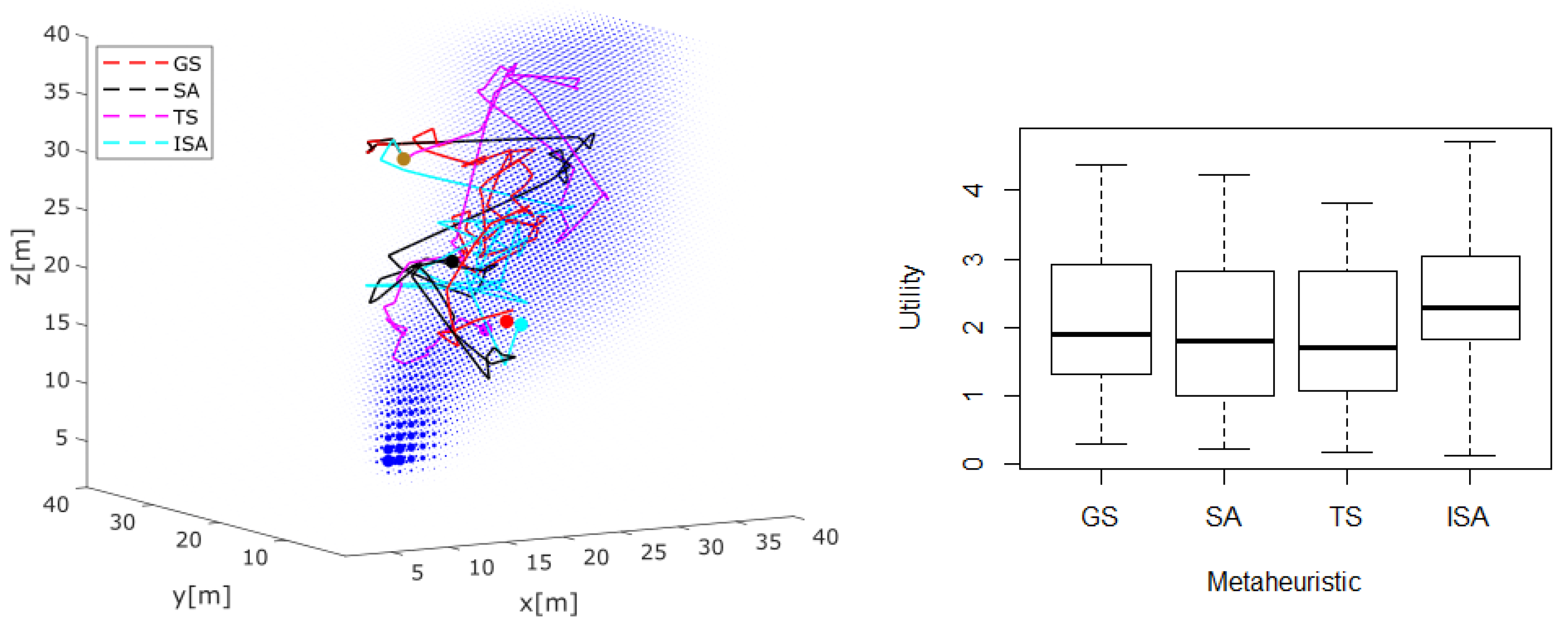
4.3. Performance Evaluation
- The energy consumption, which determines the efficiency of the algorithm to trace the pollutant plume, following the shortest and smoothest path;
- The average level of the pollutant measurements during the search, which defines the quality of the algorithm for following always the direction towards the increasing pollutant concentration; and
- The distance to the real location of the source at the end of the simulation, which indeed is the goal of the algorithms.
4.4. Results of the Comparative Analysis
5. Pollutant Source Localization
5.1. Likelihood Map for Source Localization
5.2. Integrated Algorithm
5.3. Inclusion of the Heuristic
| = current and calculated positions of the vehicle; | |
| = a real number that means the waypoints resolution, defined according to the UAV capacity and the environment dimension. High values of remains at large distances among the calculated waypoints . Conditions of a large targeted environment and low GPS resolution of the UAV will require high values; | |
| = a real random vector that means the deviation parameter, which allows small deviations, from the calculated waypoint , to compensate the stochastic behavior of the system. Low values of are recommended; | |
| = a real vector that means the direction of the current position of the UAV to the most probable region of the source location, obtained from the LMLS; and | |
| = a real number that represents the average of historical pollutant information captured from to . This parameter helps to establish smaller steps of movements of the UAV in regions with high concentrations of the pollutant. |
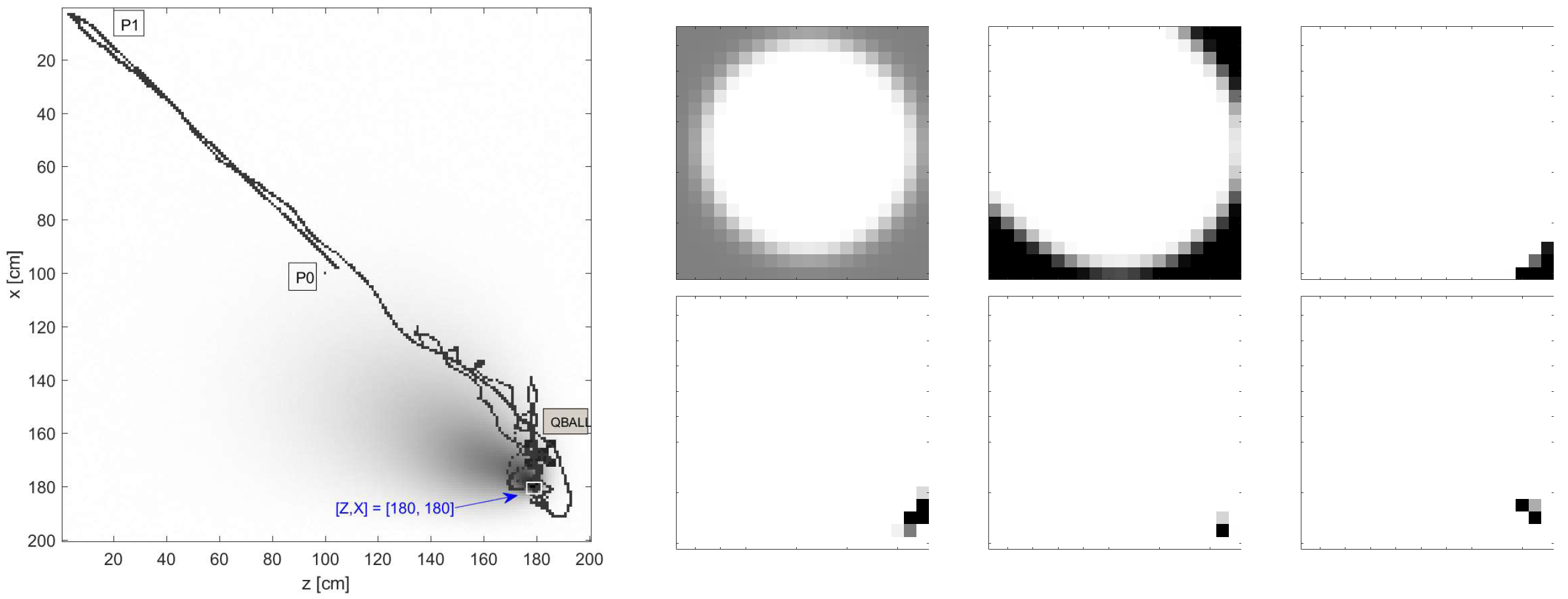
6. Experiments and Results
6.1. Experiment Design
6.2. Experiments
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Ambient Air Pollution: A Global Assessment of Exposure and Burden of Disease; Technical report; WHO: Geneva, Switzerland, 2016; Available online: http://www.who.int/phe/publications/air-pollution-global-assessment/en/ (accessed on 30 August 2019).
- Stieb, D.M.; Chen, L.; Hystad, P.; Beckerman, B.S.; Jerrett, M.; Tjepkema, M.; Crouse, D.L.; Omariba, D.W.; Peters, P.A.; van Donkelaar, A.; et al. A national study of the association between traffic-related air pollution and adverse pregnancy outcomes in Canada, 1999–2008. Environ. Res. 2016, 148, 513–526. [Google Scholar] [CrossRef] [PubMed]
- Carugno, M.; Consonni, D.; Randi, G.; Catelan, D.; Grisotto, L.; Bertazzi, P.A.; Biggeri, A.; Baccini, M. Air pollution exposure, cause-specific deaths and hospitalizations in a highly polluted Italian region. Environ. Res. 2016, 147, 415–424. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sepúlveda, F. Air Pollution And Sick Leaves: The Child Health Link. Hitotsubashi J. Econ. 2014, 2014, 109–120. [Google Scholar]
- Van der Zee, S.C.; Fischer, P.H.; Hoek, G. Air pollution in perspective: Health risks of air pollution expressed in equivalent numbers of passively smoked cigarettes. Environ. Res. 2016, 148, 475–483. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Villa, T.F.; Salimi, F.; Morton, K.; Morawska, L.; Gonzalez, F. Development and Validation of a UAV Based System for Air Pollution Measurements. Sensors 2016, 16, 2202. [Google Scholar] [CrossRef]
- Zhou, X.; Aurell, J.; Mitchell, W.; Tabor, D.; Gullett, B. A small, lightweight multipollutant sensor system for ground-mobile and aerial emission sampling from open area sources. Atmos. Environ. 2017, 154, 31–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roldán, J.J.; Joossen, G.; Sanz, D.; del Cerro, J.; Barrientos, A. Mini-UAV based sensory system for measuring environmental variables in greenhouses. Sensors 2015, 15, 3334–3350. [Google Scholar] [CrossRef]
- Kersnovski, T.; Gonzalez, F.; Morton, K. A UAV system for autonomous target detection and gas sensing. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–12. [Google Scholar] [CrossRef]
- Malaver, A.; Motta, N.; Corke, P.; Gonzalez, F. Development and integration of a solar powered unmanned aerial vehicle and a wireless sensor network to monitor greenhouse gases. Sensors 2015, 15, 4072–4096. [Google Scholar] [CrossRef]
- Peng, C.C.; Hsu, C.Y. Integration of an unmanned vehicle and its application to real-time gas detection and monitoring. In Proceedings of the 2015 IEEE International Conference on Consumer Electronics, Taipei, Taiwan, 6–8 June 2015; pp. 320–321. [Google Scholar] [CrossRef]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef]
- Alvear, O.; Zema, N.R.; Natalizio, E.; Calafate, C.T. Using UAV-Based Systems to Monitor Air Pollution in Areas with Poor Accessibility. J. Adv. Transp. 2017, 2017, 14. [Google Scholar] [CrossRef]
- Kristiansen, R.; Oland, E.; Narayanachar, D. Operational concepts in UAV formation monitoring of industrial emissions. In Proceedings of the 2012 IEEE 3rd International Conference on Cognitive Infocommunications (CogInfoCom), Kosice, Slovakia, 2–5 December 2012; pp. 339–344. [Google Scholar] [CrossRef]
- Han, J.; Xu, Y.; Di, L.; Chen, Y. Low-cost multi-UAV technologies for contour mapping of nuclear radiation field. J. Intell. Robot. Syst. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- Shen, Z.; He, Z.; Li, S.; Wang, Q.; Shao, Z. A multi-quadcopter cooperative cyber-physical system for timely air pollution localization. ACM Trans. Embed. Comput. Syst. (TECS) 2017, 16, 70. [Google Scholar] [CrossRef]
- Hu, S.C.; Wang, Y.C.; Huang, C.Y.; Tseng, Y.C. Measuring air quality in city areas by vehicular wireless sensor networks. J. Syst. Softw. 2011, 84, 2005–2012. [Google Scholar] [CrossRef]
- Alvear, O.; Calafate, C.T.; Zema, N.R.; Natalizio, E.; Hernández-Orallo, E.; Cano, J.C.; Manzoni, P. A Discretized Approach to Air Pollution Monitoring Using UAV-based Sensing. Mob. Netw. Appl. 2018, 23, 1693–1702. [Google Scholar] [CrossRef] [Green Version]
- Yungaicela-Naula, N.M.; Zhang, Y.; Garza-Castañon, L.E.; Minchala, L.I. UAV-based Air Pollutant Source Localization Using Gradient and Probabilistic Methods. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 702–707. [Google Scholar]
- Cabrita, G.; de Sousa, P.A.M.; Marques, L. Odor Guided Exploration and Plume Tracking-Particle Plume Explorer. 2011, pp. 183–188. Available online: https://pdfs.semanticscholar.org/bf01/5fc709514c0dc3658c3d3b804feb20c44b62.pdf (accessed on 30 August 2019).
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. 2002, 22, 52–67. [Google Scholar]
- Marques, L.; Nunes, U.; de Almeida, A.T. Olfaction-based mobile robot navigation. Thin Solid Film. 2002, 418, 51–58. [Google Scholar] [CrossRef] [Green Version]
- Nurzaman, S.G.; Matsumoto, Y.; Nakamura, Y.; Koizumi, S.; Ishiguro, H. Biologically inspired adaptive mobile robot search with and without gradient sensing. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 142–147. [Google Scholar] [CrossRef]
- Neumann, P.P.; Hernandez Bennetts, V.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Gas source localization with a micro-drone using bio-inspired and particle filter-based algorithms. Adv. Robot. 2013, 27, 725–738. [Google Scholar] [CrossRef]
- Pang, S.; Farrell, J.A. Chemical plume source localization. IEEE Trans. Syst. Man Cybern. Part B (Cybernetics) 2006, 36, 1068–1080. [Google Scholar] [CrossRef]
- Van Milligen, B.P.; Bons, P.D.; Carreras, B.A.; Sánchez, R. On the applicability of Fick’s law to diffusion in inhomogeneous systems. Eur. J. Phys. 2005, 26, 913. [Google Scholar] [CrossRef]
- Hosseinin, B. Dispersion of Pollutants in the Atmosphere: A Numerical Study. Master’s Thesis, Simon Fraser University, Burnaby, BC, Canada, 2013. [Google Scholar]
- Šmídl, V.; Hofman, R. Tracking of atmospheric release of pollution using unmanned aerial vehicles. Atmos. Environ. 2013, 67, 425–436. [Google Scholar] [CrossRef]
- Gendreau, M.; Potvin, J.Y. Handbook of Metaheuristics; Springer: Berlin, Germany, 2010; Volume 2. [Google Scholar]
- Aarts, E.; Korst, J.; Michiels, W. Simulated annealing. In Search Methodologies; Springer: Berlin, Germany, 2014; pp. 265–285. [Google Scholar]
- Daly, A.; Zannetti, P. Air Pollution Modeling—An Overview. Available online: http://envirocomp.org/books/chapters/2aap.pdf (accessed on 12 April 2018).
- Liu, Z.; Yuan, C.; Yu, X.; Zhang, Y. Retrofit fault-tolerant tracking control design of an unmanned quadrotor helicopter considering actuator dynamics. Int. J. Robust Nonlinear Control 2017. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y. An Adaptive Fault-Tolerant Sliding Mode Control Allocation Scheme for Multirotor Helicopter Subject to Simultaneous Actuator Faults. IEEE Trans. Ind. Electr. 2017, 65, 4227–4236. [Google Scholar] [CrossRef]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yungaicela-Naula, N.; Garza-Castañon, L.E.; Zhang, Y.; Minchala-Avila, L.I. UAV-Based Air Pollutant Source Localization Using Combined Metaheuristic and Probabilistic Methods. Appl. Sci. 2019, 9, 3712. https://doi.org/10.3390/app9183712
Yungaicela-Naula N, Garza-Castañon LE, Zhang Y, Minchala-Avila LI. UAV-Based Air Pollutant Source Localization Using Combined Metaheuristic and Probabilistic Methods. Applied Sciences. 2019; 9(18):3712. https://doi.org/10.3390/app9183712
Chicago/Turabian StyleYungaicela-Naula, Noe, Luis E. Garza-Castañon, Youmin Zhang, and Luis I. Minchala-Avila. 2019. "UAV-Based Air Pollutant Source Localization Using Combined Metaheuristic and Probabilistic Methods" Applied Sciences 9, no. 18: 3712. https://doi.org/10.3390/app9183712
APA StyleYungaicela-Naula, N., Garza-Castañon, L. E., Zhang, Y., & Minchala-Avila, L. I. (2019). UAV-Based Air Pollutant Source Localization Using Combined Metaheuristic and Probabilistic Methods. Applied Sciences, 9(18), 3712. https://doi.org/10.3390/app9183712