Control Strategy of a Hybrid Renewable Energy System Based on Reinforcement Learning Approach for an Isolated Microgrid



Abstract
:Featured Application
Abstract
1. Introduction
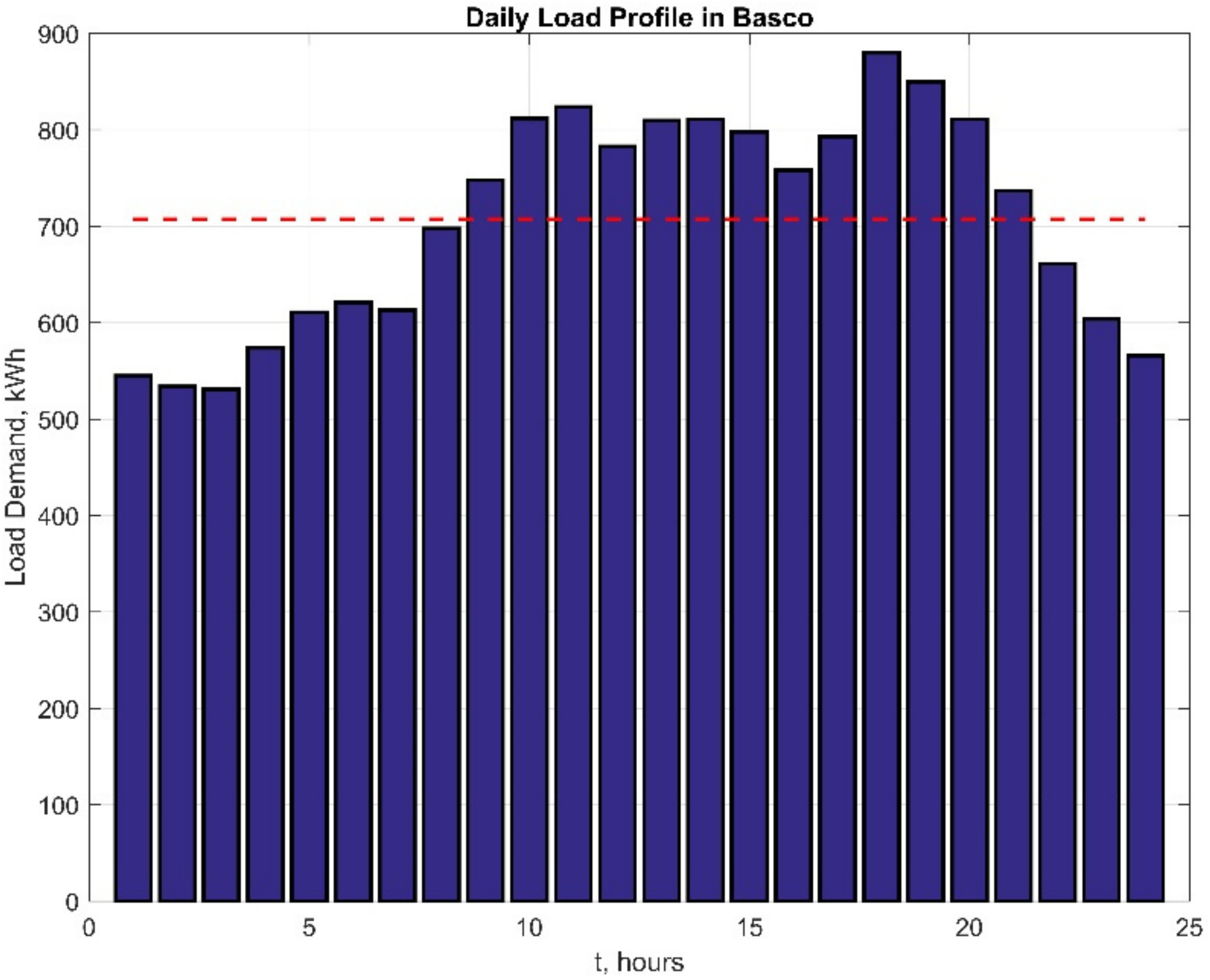
- The optimal sizing of hybrid renewable hydrogen energy system by HOMER was presented for the case study based in Basco island, The Philippines.
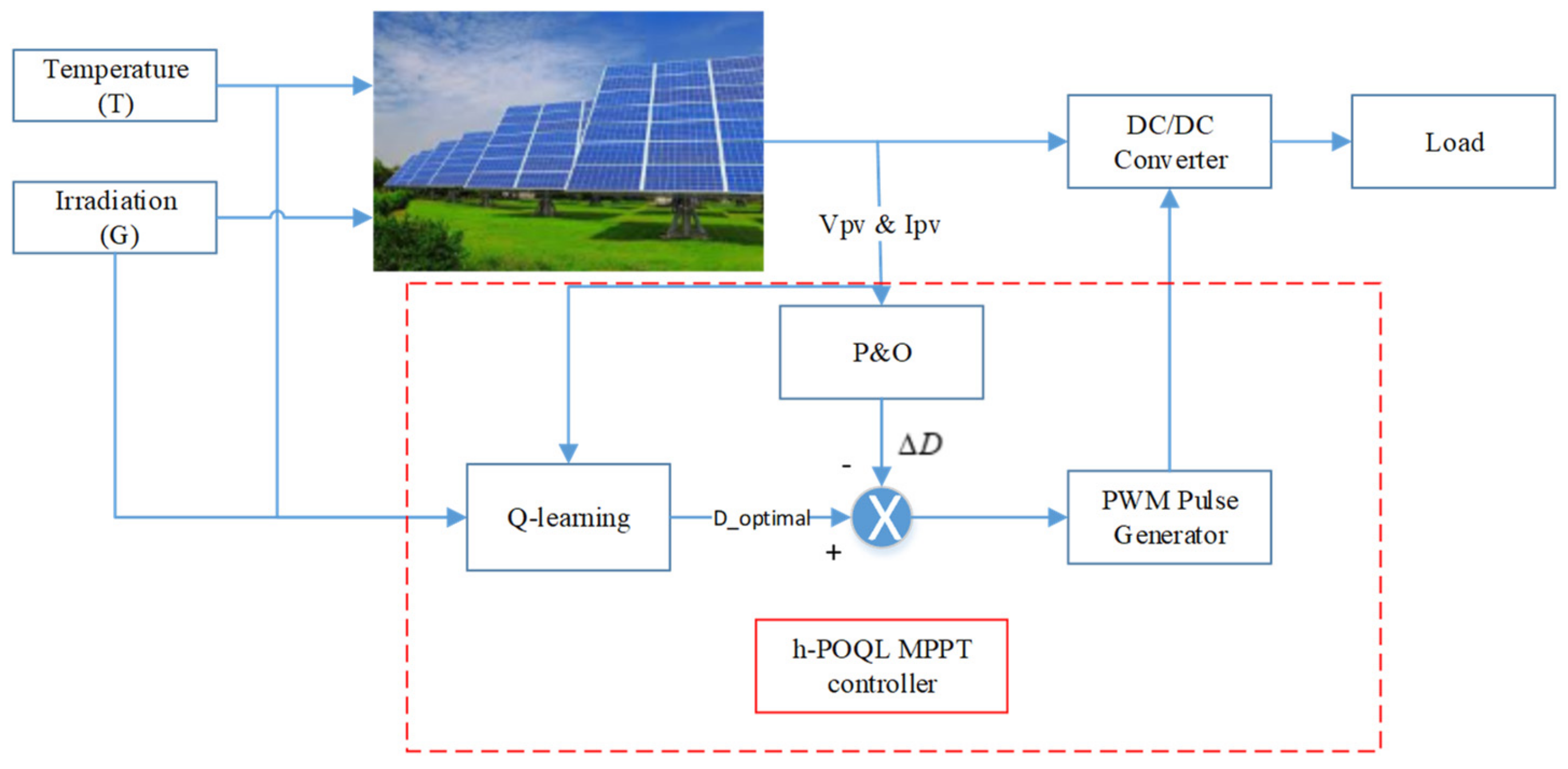
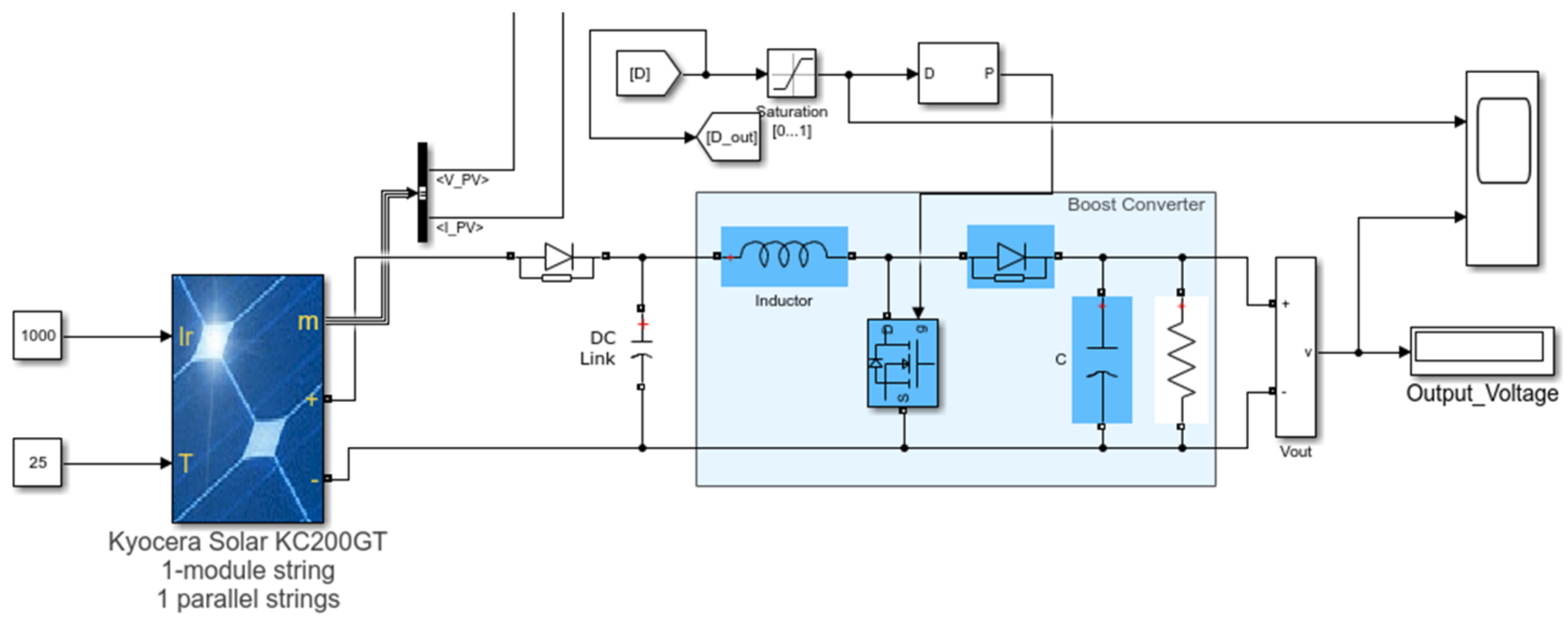
- A proposed robust MPPT control based on the Q-learning and P&O methods, named as h-POQL, was simulated and validated in MATLAB/Simulink.
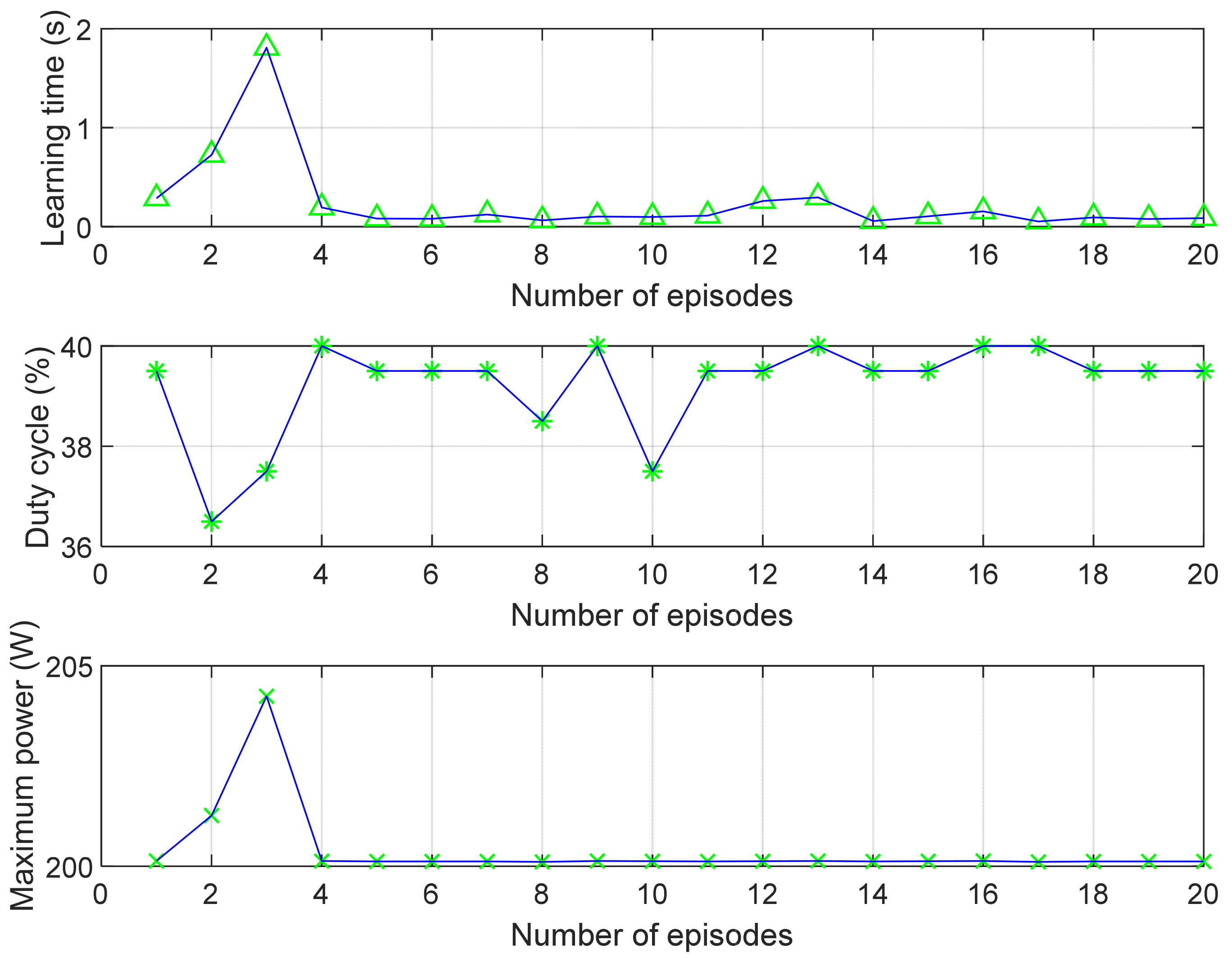
- The simulation of the proposed h-POQL shows that the P&O controller can tune the reference input values of the duty cycle and track the maximum power point with faster speed and high accuracy based on the optimal results learned by the Q-learning algorithm.
- A comparison between the h-POQL and the P&O method was carried out.
2. The Assessment of the Energy Management System for HRES
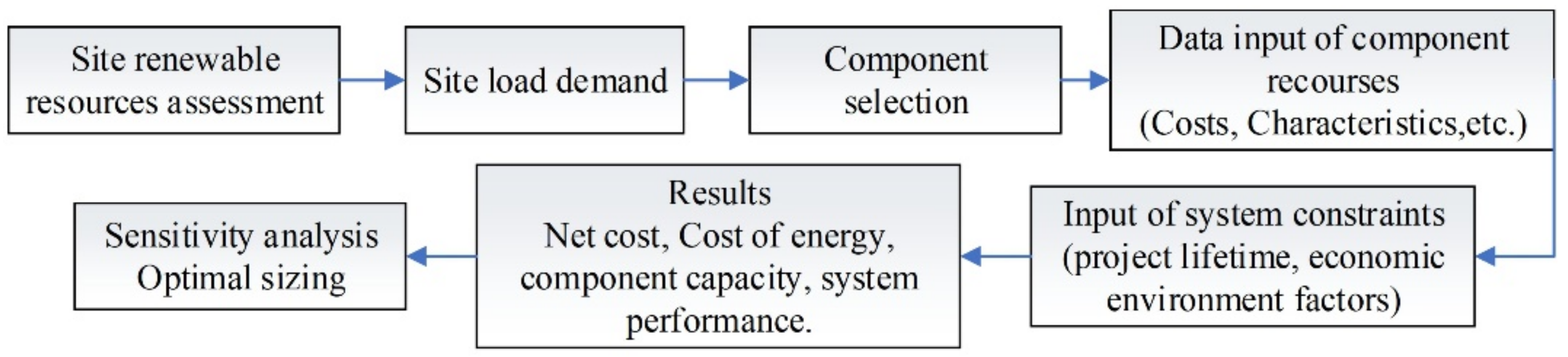
3. Optimal Sizing of HRES Based on HOMER
3.1. Site Description
3.2. System Components
3.3. Optimization Criteria
3.3.1. The Net Present Cost
3.3.2. Cost of Energy
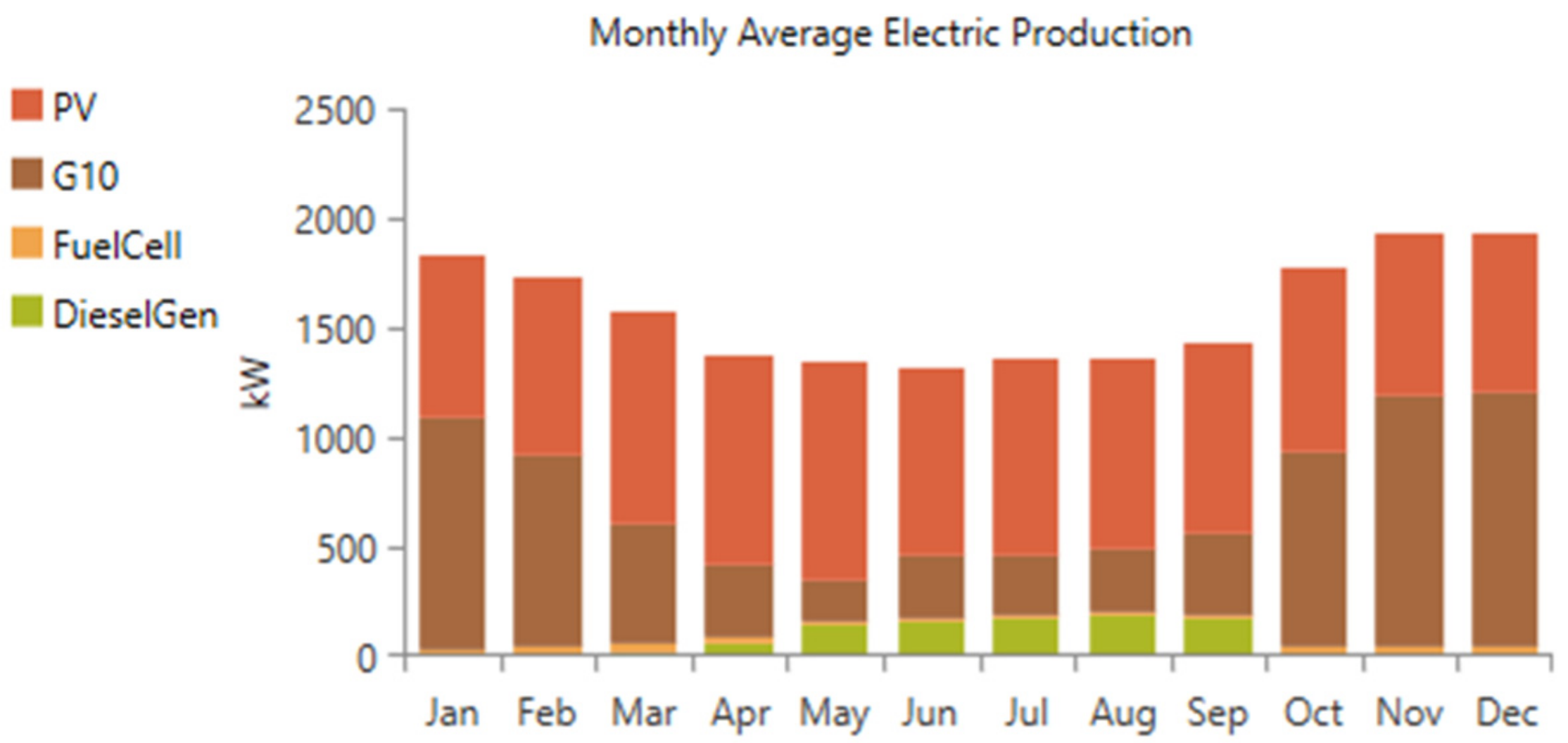
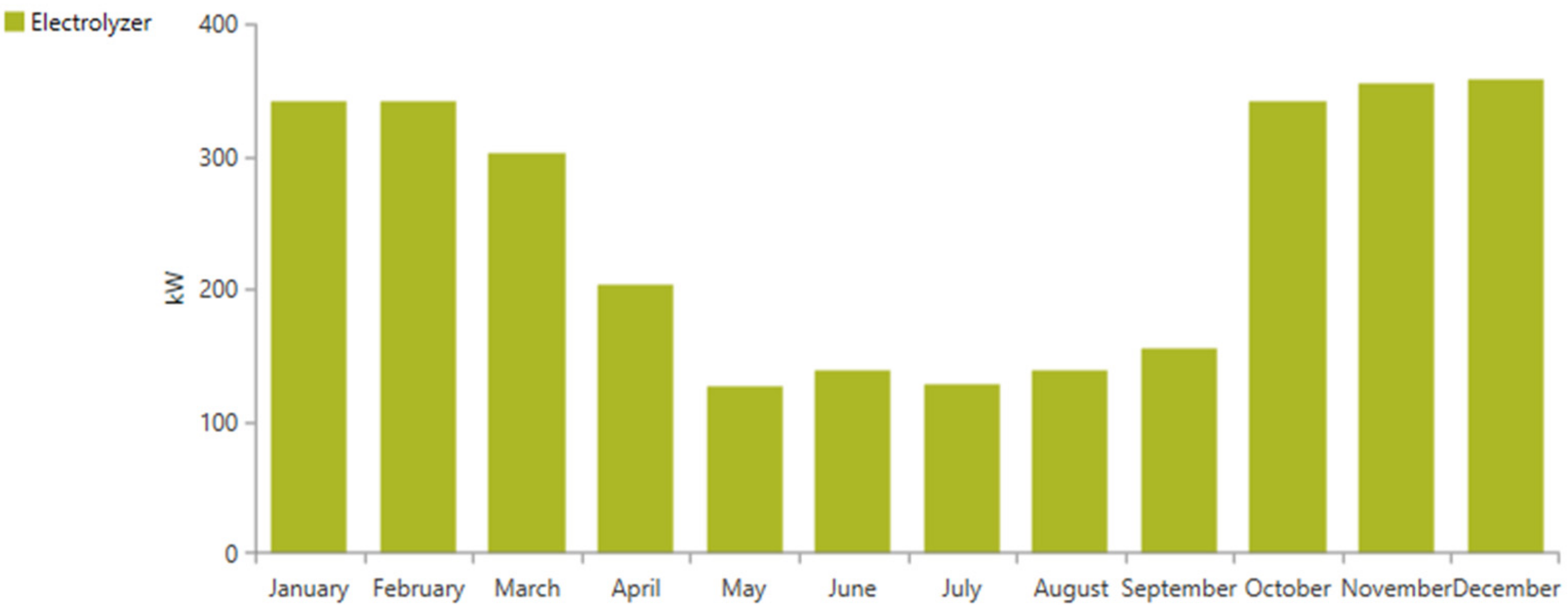
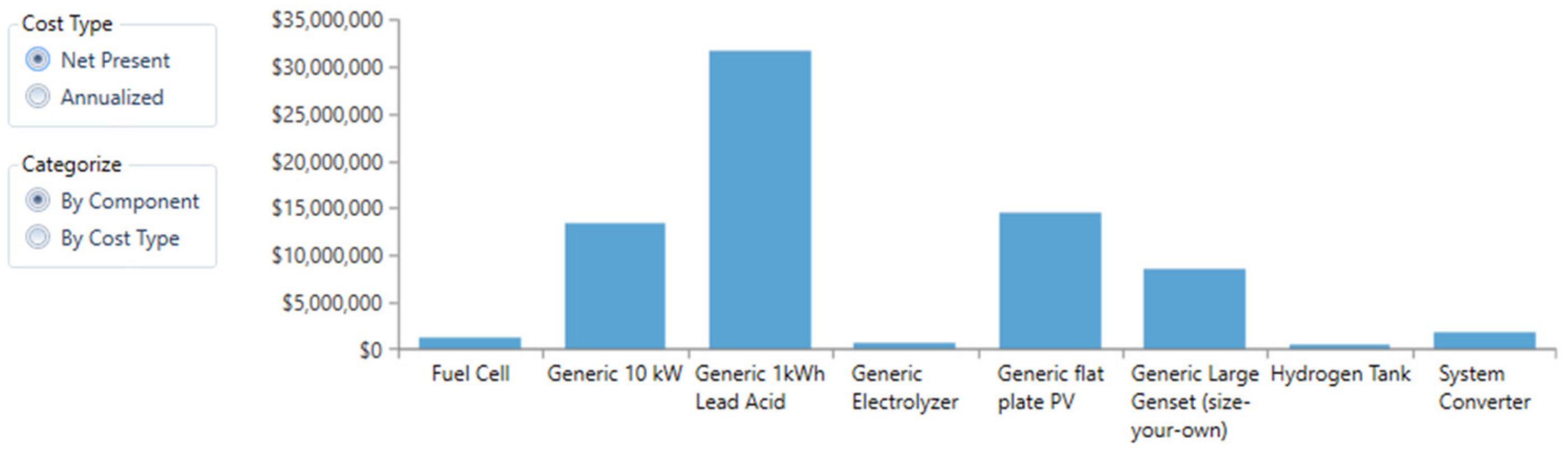
3.4. Optimal Sizing Results
4. The Proposed h-POQL MPPT Control
4.1. The Assessment of the MPPT Control Methods
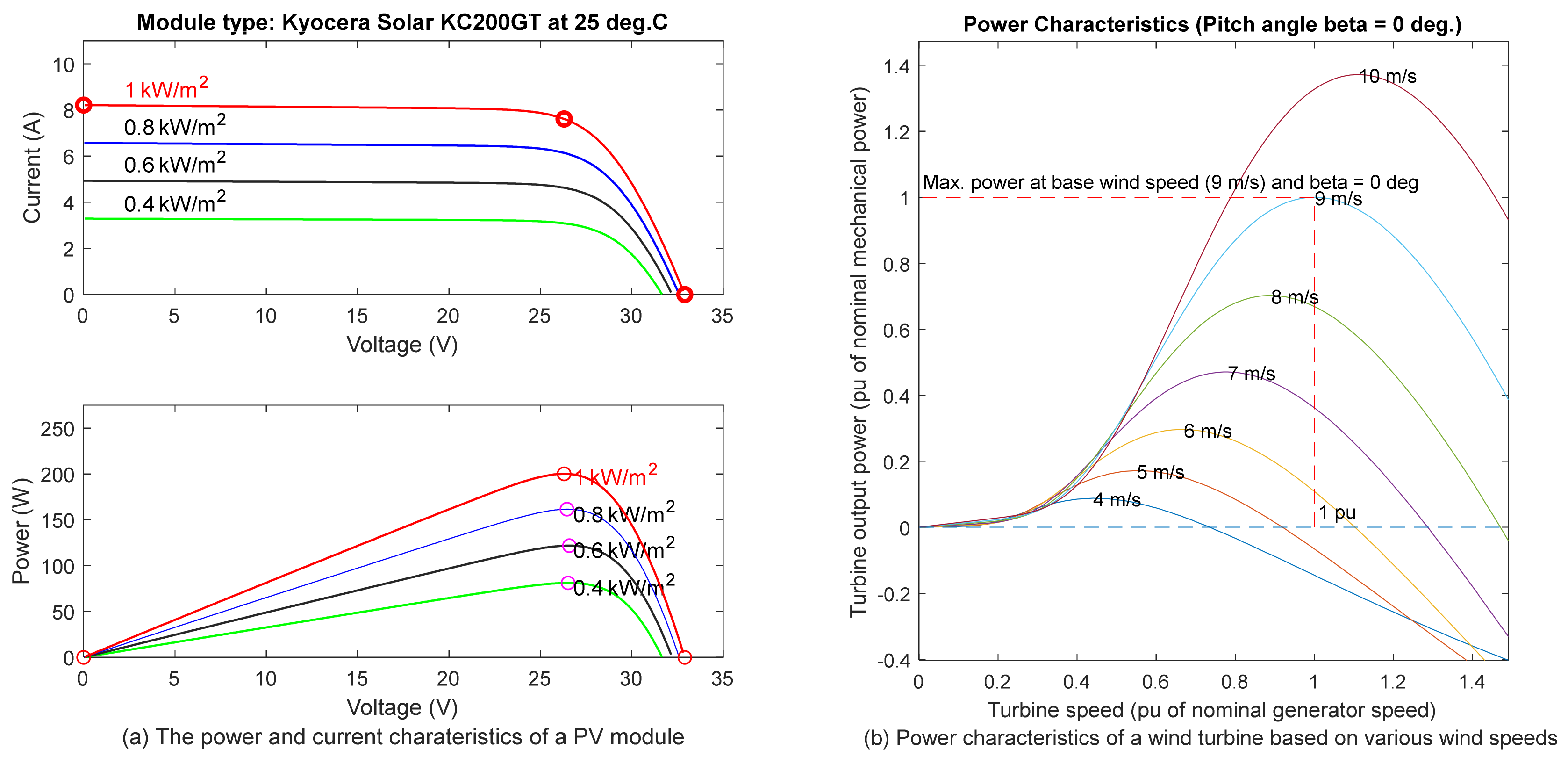
- In Figure 12a, based on a typical solar radiation and temperature, there is a unique maximum power point (MPP) on the power-voltage (P-V) curve where the system can operate at the maximum efficiency and produce maximum power. Similar to PV system, the wind turbine produces maximum output power at a specific point of P- curve as shown on the right hand side of Figure 12b. Thus, it is necessary to continuously track the MPP in order to maximize the output power. In generally, the major tasks of MPPT controller include:
- How to quickly find the MPP.
- How to stably stay at the MPP.
- How to smoothly move from one MPP to another for rapid weather condition change.
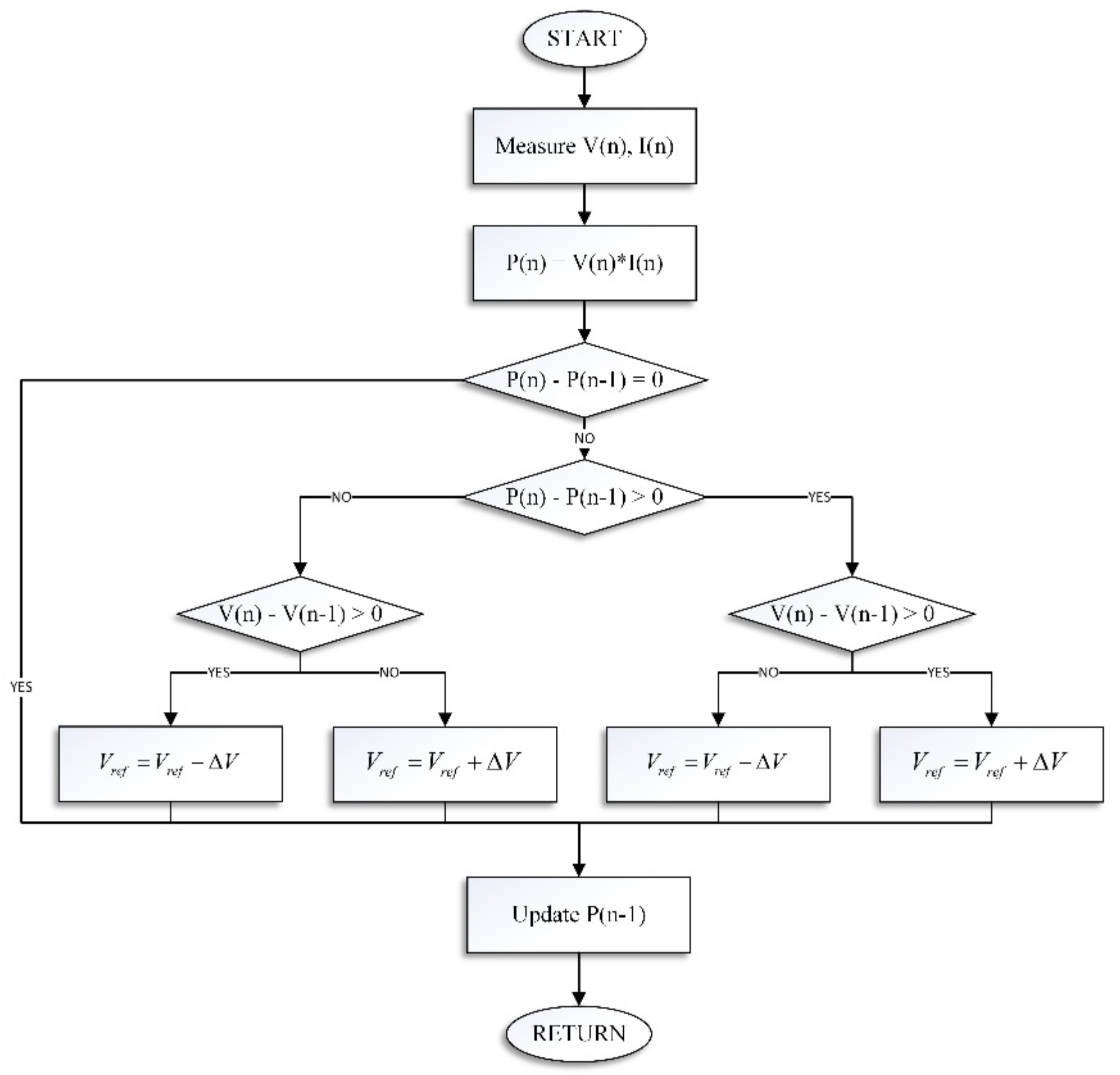
- Conventional methods, such as Perturbation & Observation (P&O), Incremental Conductance (IC), Open Circuit Voltage (OV), and Short Circuit Current (SC), are famous for their easy implementation, but their disadvantages are that they are poor convergence, slow tracking speed, and high steady-state oscillations. In contracts, AI methods are complicated in design and require high computing power. However, due to the technological development of computer science, the AI method-based MPPT methods are a new trend with fast tracking speed and convergence, and low oscillation [15].
- A lot of MPPT methods have been developed following soft computing techniques, including FLC, ANN, and ANFIS [47]. The drawbacks of these methods are that they need a large computer memory for training and the rule implementation.
- The next era of MPPT control is based on the evolution algorithms such as Genetic Algorithm, Cuckoo Search, Ant Colony Optimization, Bee Colony, Firefly Algorithms, and Random Search since these methods can efficiently solve the non-linear problems. Among these methods, PSO has become more commonly used in this field due to its easy implementation, simplicity, and robustness. Besides, it can combine with other methods to create new approaches [15,47].
- Hybrid methods which integrate two or more MPPT algorithms together have a better performance and utilize the advantages of each method such as PSO-P&O, and PSO-GA [15]. The advantage of these methods is that they can help to track the global maximum power point quickly under the partial shading conditions.
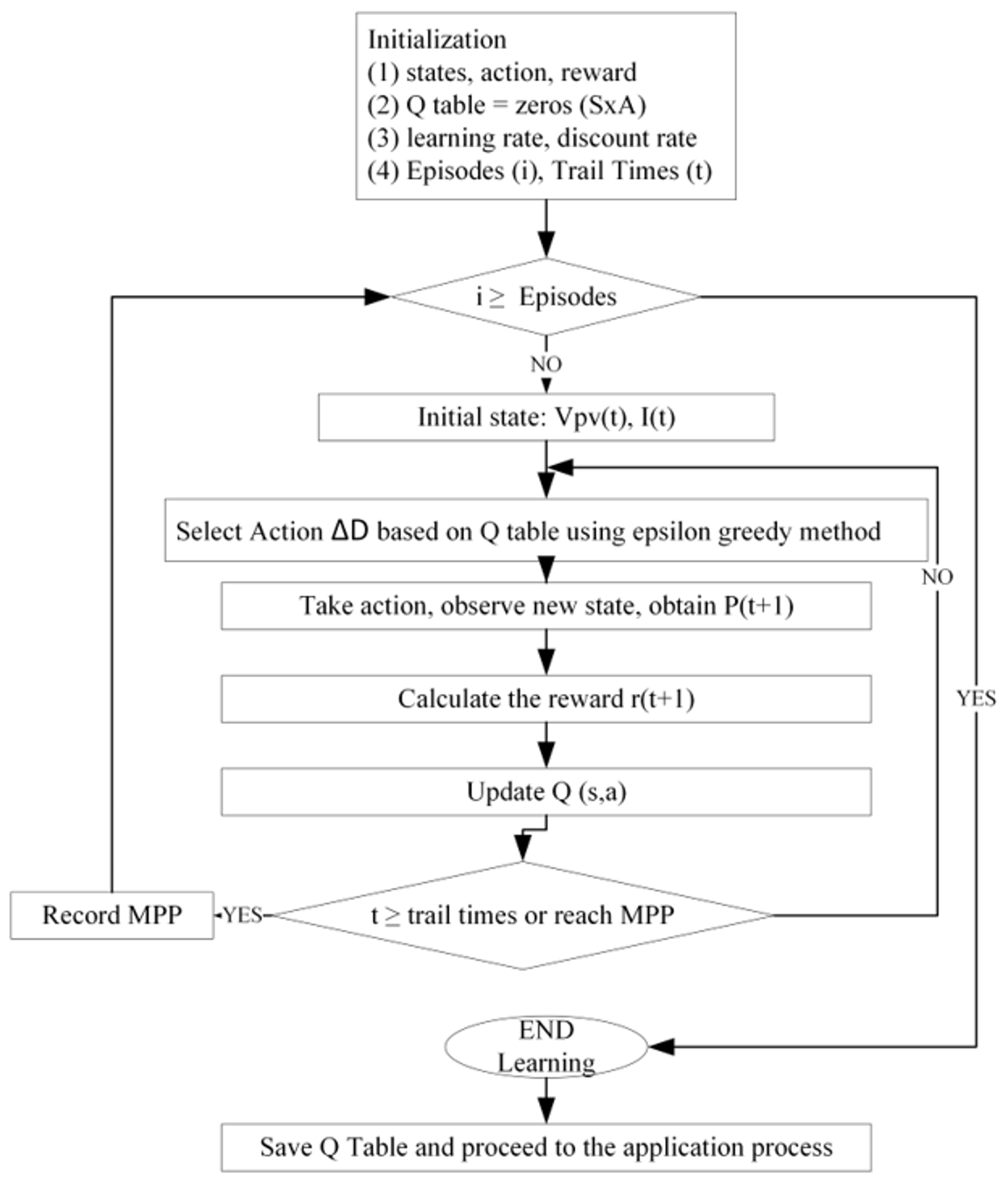
- State-spaces are represented by the voltage-power pair:
- Action-spaces are the perturbations of duty cycle to the PV voltage:
- Rewards:
4.2. Methodology of the h-POQL MPPT Control
4.3. Simulation Results
4.3.1. Simulation of MPPT Control Based on Q-Learning
4.3.2. Simulation and Validation of h-POQL MPPT Controller
5. Discussions
6. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- ASEAN Center for Energy Team. ASEAN Renewable Energy Policies; ASEAN Centre for Energy: Jakarta, Indonesia, 2016. [Google Scholar]
- Lin, C.E.; Phan, B.C. Optimal Hybrid Energy Solution for Island Micro-Grid. In Proceedings of the 2016 IEEE International Conferences on Big Data and Cloud Computing (BDCloud), Social Computing and Networking (SocialCom), Sustainable Computing and Communications (SustainCom) (BDCloud-SocialCom-SustainCom), Atlanta, GA, USA, 8–10 October 2016. [Google Scholar]
- Chauhan, A.; Saini, R.P. A review on Integrated Renewable Energy System based power generation for stand-alone applications: Configurations, storage options, sizing methodologies and control. Renew. Sustain. Energy Rev. 2014, 38, 99–120. [Google Scholar] [CrossRef]
- Vivas, F.J.; de las Heras, A.; Segura, F.; Andújar, J.M. A review of energy management strategies for renewable hybrid energy systems with hydrogen backup. Renew. Sustain. Energy Rev. 2018, 82, 126–155. [Google Scholar] [CrossRef]
- Ahangari Hassas, M.; Pourhossein, K. Control and Management of Hybrid Renewable Energy Systems: Review and Comparison of Methods. J. Oper. Autom. Power Eng. 2017, 5, 131–138. [Google Scholar]
- Fadaee, M.; Radzi, M.A.M. Multi-objective optimization of a stand-alone hybrid renewable energy system by using evolutionary algorithms: A review. Renew. Sustain. Energy Rev. 2012, 16, 3364–3369. [Google Scholar] [CrossRef]
- Mellit, A.; Kalogirou, S.A.; Hontoria, L.; Shaari, S. Artificial intelligence techniques for sizing photovoltaic systems: A review. Renew. Sustain. Energy Rev. 2009, 13, 406–419. [Google Scholar] [CrossRef]
- Siddaiah, R.; Saini, R.P. A review on planning, configurations, modeling and optimization techniques of hybrid renewable energy systems for off grid applications. Renew. Sustain. Energy Rev. 2016, 58, 376–396. [Google Scholar] [CrossRef]
- Dawoud, S.M.; Lin, X.; Okba, M.I. Hybrid renewable microgrid optimization techniques: A review. Renew. Sustain. Energy Rev. 2018, 82, 2039–2052. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Olatomiwa, L.; Mekhilef, S.; Ismail, M.S.; Moghavvemi, M. Energy management strategies in hybrid renewable energy systems: A review. Renew. Sustain. Energy Rev. 2016, 62, 821–835. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Alpaydin, E. Introduction to Machine Learning; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Bendib, B.; Belmili, H.; Krim, F. A survey of the most used MPPT methods: Conventional and advanced algorithms applied for photovoltaic systems. Renew. Sustain. Energy Rev. 2015, 45, 637–648. [Google Scholar] [CrossRef]
- Chandra, S.; Gaur, P.; Srishti. Maximum Power Point Tracking Approaches for Wind–Solar Hybrid Renewable Energy System—A Review. In Advances in Energy and Power Systems; Lecture Notes in Electrical Engineering; Springer: Singapore, 2018; Volume 508, pp. 3–12. [Google Scholar]
- Hsu, R.C.; Liu, C.T.; Chen, W.Y.; Hsieh, H.I.; Wang, H.L. A Reinforcement Learning-Based Maximum Power Point Tracking Method for Photovoltaic Array. Int. J. Photoenergy 2015, 2015, 496401. [Google Scholar] [CrossRef]
- Yousef, A.; El-Telbany, M.; Zekry, A. Reinforcement Learning for Online Maximum Power Point Tracking Control. J. Clean Energy Technol. 2015, 4, 245–248. [Google Scholar] [CrossRef] [Green Version]
- Kofinas, P.; Doltsinis, S.; Dounis, A.I.; Vouros, G.A. A Reinforcement Learning Approach for MPPT Control Method of Photovoltaic Sources. Renew. Energy 2017, 108, 461–473. [Google Scholar] [CrossRef]
- Indragandhi, V.; Subramaniyaswamy, V.; Logesh, R. Resources, configurations, and soft computing techniques for power management and control of PV/wind hybrid system. Renew. Sustain. Energy Rev. 2017, 69, 129–143. [Google Scholar]
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Microgrids energy management systems: A critical review on methods, solutions, and prospects. Appl. Energy 2018, 222, 1033–1055. [Google Scholar] [CrossRef]
- Jayalakshmi, N.S.; Gaonkar, D.N.; Nempu, P.B. Power Control of PV/Fuel Cell/Supercapacitor Hybrid System for Stand-Alone Applications. Int. J. Renew. Energy Res. 2016, 6, 672–679. [Google Scholar]
- Roumila, Z.; Rekioua, D.; Rekioua, T. Energy management based fuzzy logic controller of hybrid system wind/photovoltaic/diesel with storage battery. Int. J. Hydrogen Energy 2017, 42, 19525–19535. [Google Scholar] [CrossRef]
- Varghese, N.; Reji, P. Battery charge controller for hybrid stand alone system using adaptive neuro fuzzy inference system. In Proceedings of the 2016 International Conference on Energy Efficient Technologies for Sustainability (ICEETS), Nagercoil, India, 7–8 April 2016. [Google Scholar]
- Chong, L.W.; Wong, Y.W.; Rajkumar, R.; Rajkumar, R.K.; Isa, D. Hybrid energy storage systems and control strategies for stand-alone renewable energy power systems. Renew. Sustain. Energy Rev. 2016, 66, 174–189. [Google Scholar] [CrossRef]
- Buşoniu, L.; Babuška, R.; de Schutter, B. Multi-agent Reinforcement Learning: An Overview. In Innovations in Multi-Agent Systems and Applications-1; Srinivasan, D., Jain, L.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 183–221. [Google Scholar]
- Nguyen, T.; Nguyen, N.D.; Nahavandi, S. Deep Reinforcement Learning for Multi-Agent Systems: A Review of Challenges, Solutions and Applications. arXiv 2018, arXiv:1812.11794. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing Atari with Deep Reinforcement Learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Mocanu, E.; Mocanu, D.C.; Nguyen, P.H.; Liotta, A.; Webber, M.E.; Gibescu, M.; Slootweg, J.G. On-line Building Energy Optimization using Deep Reinforcement Learning. IEEE Trans. Smart Grid 2019, 10, 3698–3708. [Google Scholar] [CrossRef]
- Hu, Y.; Li, W.; Xu, K.; Zahid, T.; Qin, F.; Li, C. Energy Management Strategy for a Hybrid Electric Vehicle Based on Deep Reinforcement Learning. Appl. Sci. 2018, 8, 187. [Google Scholar] [CrossRef]
- Fang, Y.; Song, C.; Xia, B.; Song, Q. An energy management strategy for hybrid electric bus based on reinforcement learning. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015. [Google Scholar]
- Kim, S.; Lim, H. Reinforcement Learning Based Energy Management Algorithm for Smart Energy Buildings. Energies 2018, 11, 2010. [Google Scholar] [CrossRef]
- Leo, R.; Milton, R.S.; Sibi, S. Reinforcement learning for optimal energy management of a solar microgrid. In Proceedings of the 2014 IEEE Global Humanitarian Technology Conference-South Asia Satellite (GHTC-SAS), Trivandrum, India, 26–27 September 2014. [Google Scholar]
- Tan, Y.; Liu, W.; Qiu, Q. Adaptive power management using reinforcement learning. In Proceedings of the 2009 IEEE/ACM International Conference on Computer-Aided Design-Digest of Technical Papers, San Jose, CA, USA, 2–5 November 2009. [Google Scholar]
- Kofinas, P.; Vouros, G.; Dounis, A.I. Energy Management in Solar Microgrid via Reinforcement Learning. In Proceedings of the 9th Hellenic Conference on Artificial Intelligence, Thessaloniki, Greece, 18–20 May 2016; pp. 1–7. [Google Scholar]
- Kofinas, P.; Vouros, G.; Dounis, A. Energy management in solar microgrid via reinforcement learning using fuzzy reward. Adv. Build. Energy Res. 2017, 12, 1–19. [Google Scholar] [CrossRef]
- Anvari-Moghaddam, A.; Rahimi-Kian, A.; Mirian, M.S.; Guerrero, J.M. A multi-agent based energy management solution for integrated buildings and microgrid system. Appl. Energy 2017, 203, 41–56. [Google Scholar] [CrossRef] [Green Version]
- Ghorbani, S.; Rahmani, R.; Unland, R. Multi-agent Autonomous Decision Making in Smart Micro-Grids’ Energy Management: A Decentralized Approach. In Multiagent System Technologies; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Bogaraj, T.; Kanakaraj, J. Intelligent energy management control for independent microgrid. Sādhanā 2016, 41, 755–769. [Google Scholar] [Green Version]
- Kim, H.M.; Lim, Y.; Kinoshita, T. An Intelligent Multiagent System for Autonomous Microgrid Operation. Energies 2012, 5, 3347–3362. [Google Scholar] [CrossRef] [Green Version]
- Eddy, Y.S.F.; Gooi, H.B.; Chen, S.X. Multi-Agent System for Distributed Management of Microgrids. IEEE Trans. Power Syst. 2015, 30, 24–34. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Liang, X.; Huang, B. Event-Triggered-Based Distributed Cooperative Energy Management for Multienergy Systems. IEEE Trans. Ind. Inform. 2019, 15, 2008–2022. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Y.; Gao, D.W.; Zhou, J. Distributed Optimal Energy Management for Energy Internet. IEEE Trans. Ind. Inform. 2017, 13, 3081–3097. [Google Scholar] [CrossRef]
- Raju, L.; Sankar, S.; Milton, R.S. Distributed Optimization of Solar Micro-grid Using Multi Agent Reinforcement Learning. Procedia Comput. Sci. 2015, 46, 231–239. [Google Scholar] [CrossRef] [Green Version]
- Kofinas, P.; Dounis, A.I.; Vouros, G.A. Fuzzy Q-Learning for multi-agent decentralized energy management in microgrids. Appl. Energy 2018, 219, 53–67. [Google Scholar] [CrossRef]
- Bahramara, S.; Moghaddam, M.P.; Haghifam, M.R. Optimal planning of hybrid renewable energy systems using HOMER: A review. Renew. Sustain. Energy Rev. 2016, 62, 609–620. [Google Scholar] [CrossRef]
- Luta, D.N.; Raji, A.K. Optimal sizing of hybrid fuel cell-supercapacitor storage system for off-grid renewable applications. Energy 2019, 166, 530–540. [Google Scholar] [CrossRef]
- Ram, J.P.; Babu, T.S.; Rajasekar, N. A comprehensive review on solar PV maximum power point tracking techniques. Renew. Sustain. Energy Rev. 2017, 67, 826–847. [Google Scholar] [CrossRef]
- Wei, C.; Zhang, Z.; Qiao, W.; Qu, L. Reinforcement-Learning-Based Intelligent Maximum Power Point Tracking Control for Wind Energy Conversion Systems. IEEE Trans. Ind. Electron. 2015, 62, 6360–6370. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Advantages | Disadvantages |
|---|---|---|
| fuzzy logic control (FLC) | -Following the rule basis and membership functions (MF), easy to understand. -Insensitive to variation of the parameters. -Do not need a good model of the system and training process. | -Trial-and-error method for determining the MFs, time-consuming and not optimal performance. -Greater number of variables makes it more complex to optimize the MFs. |
| ANN | -Able to learn and to process parallel data. -Nonlinear and adaptive structure. -Generalization skills and design do not depend on system parameters. -Fast response capacities compared to the conventional method. | -Its “black box” nature and the network instruction problem lead to a lack of rules for determining the structure (cell and layers). -Historical data provides a need for the learning and tuning process. -The number of data set used to train the ANN defines the optimality. |
| adaptive neuro-fuzzy inference system (ANFIS) | -Has the inference ability of FLC and able to learn and process parallel data as ANN. -Applies neural learning rules to define and tune the MF of the fuzzy logic. | -More input variables lead to a more complex structure. |
| reinforcement learning (RL) | -Conducts learning without prior knowledge. -Can be combined with ANN for deep RL to solve the continuous state-space control problems. | -Long-time convergence for large real-world problem if not good initialization. |
| Month | Daily Solar Radiation (kWh/m2/day) | Ambient Temperature (°C) | Average Wind Speed (m/s) |
|---|---|---|---|
| January | 3.149 | 23.40 | 9.33 |
| February | 3.739 | 23.41 | 8.39 |
| March | 4.834 | 24.17 | 6.88 |
| April | 5.262 | 25.29 | 5.86 |
| May | 5.939 | 26.54 | 4.95 |
| June | 5.229 | 27.03 | 5.57 |
| July | 5.378 | 27.11 | 5.58 |
| August | 4.966 | 27.17 | 5.60 |
| September | 4.529 | 27.24 | 6.05 |
| October | 4.079 | 27.11 | 8.47 |
| November | 3.194 | 26.00 | 9.96 |
| December | 2.993 | 24.34 | 10.04 |
| PV | Generic Flat Plate PV |
|---|---|
| Factors | Value |
| Nominal power | 1 kW |
| Materials | Polycrystalline silicon |
| Derating factor | 80% |
| Slope | 21 degree |
| Ground reflection | 20% |
| Lifetime | 25 years |
| Capital cost | 2500 US$/KW |
| Replacement cost | 2250 US$/KW |
| Operation and Maintenance (O&M) cost | 10 US$/kW/year |
| Search space | 0~15,000 kW |
| Battery | Generic 1 kWh Lead Acid |
| Factors | Value |
| Nominal capacity | 1 kWh |
| Maximum capacity | 83.4 Ah |
| Nominal voltage | 12 V |
| Maximum charge current | 16.7 A |
| Maximum discharge current | 24.3 A |
| Maximum charge rate | 1 A/Ah |
| Lifetime | 8 years |
| Capital cost | 700 US$/unit |
| Replacement cost | 500 US$/unit |
| O&M cost | 10 US$/year |
| Search space | 0~25,000 kW |
| Electrolyzer | Generic |
| Factors | Value |
| Lifetime | 25 years |
| Capital cost | 2250 US$/kW |
| Replacement cost | 2025 US$/kW |
| O&M cost | 0.1 US$/op. hr. |
| Search space | 0~5000 kW |
| Hydro tank | |
| Factors | Value |
| Lifetime | 25 years |
| Capital cost | 2250 US$/kW |
| Replacement cost | 2025 US$/kW |
| O&M cost | 0.1 US$/op. hr. |
| Search space | 0~5000 kW |
| Wind Turbines | Generic 10 kW |
| Factors | Value |
| Rotor diameter | 3 m |
| Rated power | 10 kW DC (at 12.5 m/s) |
| Voltage | 48V DC |
| Lifetime | 25 years |
| Starting wind speed | 3.31 m/s |
| Cut-off wind speed | 15 m/s |
| Capital cost | 50,000 US$/unit |
| Replacement cost | 45,000 US$/unit |
| O&M cost | 500 US$/year |
| Search space | 0~1000 units |
| Diesel Generator | Generic Large Genset |
| Factors | Value |
| Minimum load ratio | 30% |
| Lifetime | 15,000 h |
| Fuel | Diesel |
| Capital cost | 1000 US$/kW |
| Replacement cost | 750 US$/kW |
| O&M cost | 0.5 US$/op. hr. |
| Search space | 0~750 kW |
| Fuel Cell | Generic fuel cell |
| Factors | Value |
| Minimum load ratio | 25% |
| Lifetime | 40,000 h |
| Fuel | Hydrogen |
| Capital cost | 2,250 US$/kW |
| Replacement cost | 2,025 US$/kW |
| O&M cost | 0.1 US$/op. hr. |
| Search space | 0~5000 kW |
| Converter | Generic |
| Factors | Value |
| Lifetime | 25 years |
| Efficiency | 95% |
| Capital cost | 1000 US$/kW |
| Replacement cost | 9000 US$/kW |
| O&M cost | 0 US$/year |
| Search space | 0~5000 kW |
| Component | Production kWh/year | Percentage (%) |
|---|---|---|
| Generic flat plate PV | 7,510,627 | 54.4 |
| Generic 10 kW WT | 5,421,873 | 39.3 |
| Diesel generator | 660,222 | 4.7 |
| Fuel cell | 218,542 | 1.6 |
| Total | 13,811,263 | 100 |
| Emission Factors | Proposed HRES | 100% Diesel Generator | Units |
|---|---|---|---|
| Carbon dioxide | 448,527 | 5,098,748 | kg/yr. |
| Carbon monoxide | 2320 | 26,378 | kg/yr. |
| Unburned hydrocarbons | 123 | 1400 | kg/yr. |
| Particulate matter | 19.8 | 226 | kg/yr. |
| Sulfur dioxide | 1096 | 12,464 | kg/yr. |
| Nitrogen oxides | 445 | 5056 | kg/yr. |
| Component | Capital (US$) | Replacement (US$) | O&M (US$) | Fuel (US$) | Salvage (US$) | Total (US$) |
|---|---|---|---|---|---|---|
| PV | 13,707,782 | 0 | 782,321 | 0 | 0 | 14,490,104 |
| WT | 11,800,000 | 0 | 1,683,604 | 0 | 0 | 13,483,604 |
| DG | 750,000 | 317,698 | 5,072,215 | 2,440,485 | −86,186 | 8,494,213 |
| Battery | 14,663,600 | 16,041,754 | 2,988,826 | 0 | −2,122,299 | 31,571,880 |
| Fuel cell | 1,125,000 | 0 | 415,194 | 0 | −195,842 | 1,344,351 |
| Electrolyzer | 750,000 | 0 | 0 | 0 | 0 | 750,000 |
| H2 tank | 500,000 | 0 | 0 | 0 | 0 | 500,000 |
| Converter | 1,757,266 | 546,895 | 0 | 0 | −323,253 | 1,798,909 |
| System | 44,871,649 | 16,906,349 | 10,942,162 | 2,440,485 | −2,727,582 | 72,433,063 |
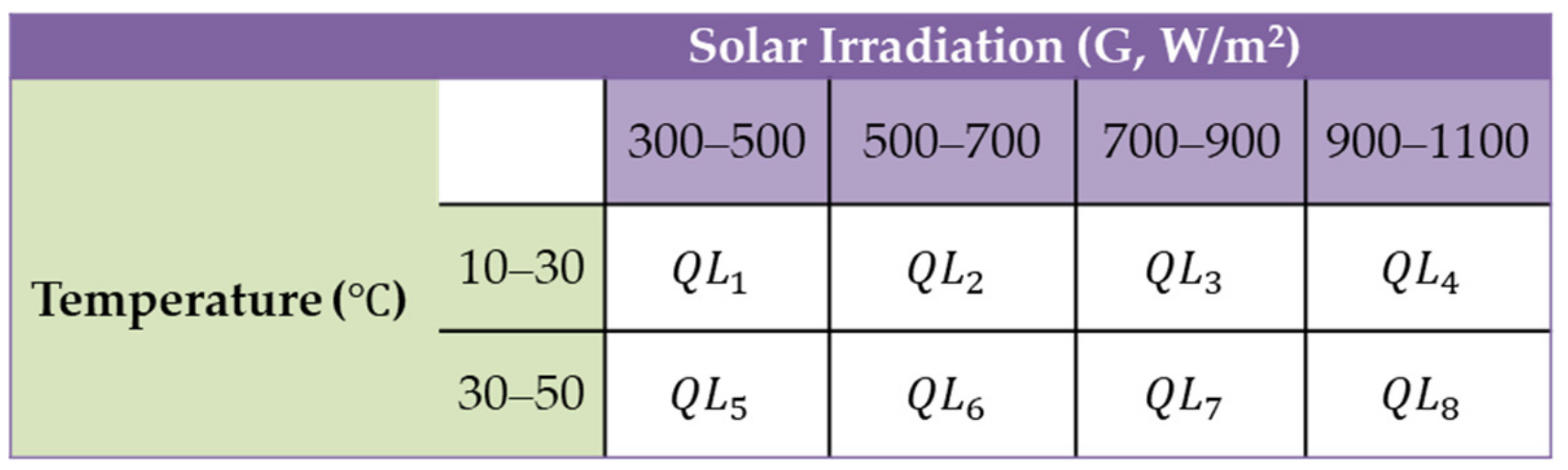
| QL1 | QL2 | QL3 | QL4 | QL5 | QL6 | QL7 | QL8 | |
|---|---|---|---|---|---|---|---|---|
| Duty cycle (%) | 17 | 21 | 32 | 39 | 19 | 24 | 35 | 41 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, B.C.; Lai, Y.-C. Control Strategy of a Hybrid Renewable Energy System Based on Reinforcement Learning Approach for an Isolated Microgrid. Appl. Sci. 2019, 9, 4001. https://doi.org/10.3390/app9194001
Phan BC, Lai Y-C. Control Strategy of a Hybrid Renewable Energy System Based on Reinforcement Learning Approach for an Isolated Microgrid. Applied Sciences. 2019; 9(19):4001. https://doi.org/10.3390/app9194001
Chicago/Turabian StylePhan, Bao Chau, and Ying-Chih Lai. 2019. "Control Strategy of a Hybrid Renewable Energy System Based on Reinforcement Learning Approach for an Isolated Microgrid" Applied Sciences 9, no. 19: 4001. https://doi.org/10.3390/app9194001
APA StylePhan, B. C., & Lai, Y. -C. (2019). Control Strategy of a Hybrid Renewable Energy System Based on Reinforcement Learning Approach for an Isolated Microgrid. Applied Sciences, 9(19), 4001. https://doi.org/10.3390/app9194001