Multi-Objective Optimization for Plug-In 4WD Hybrid Electric Vehicle Powertrain


Abstract
:1. Introduction
2. The Structure and Dynamic Model of the Powertrain
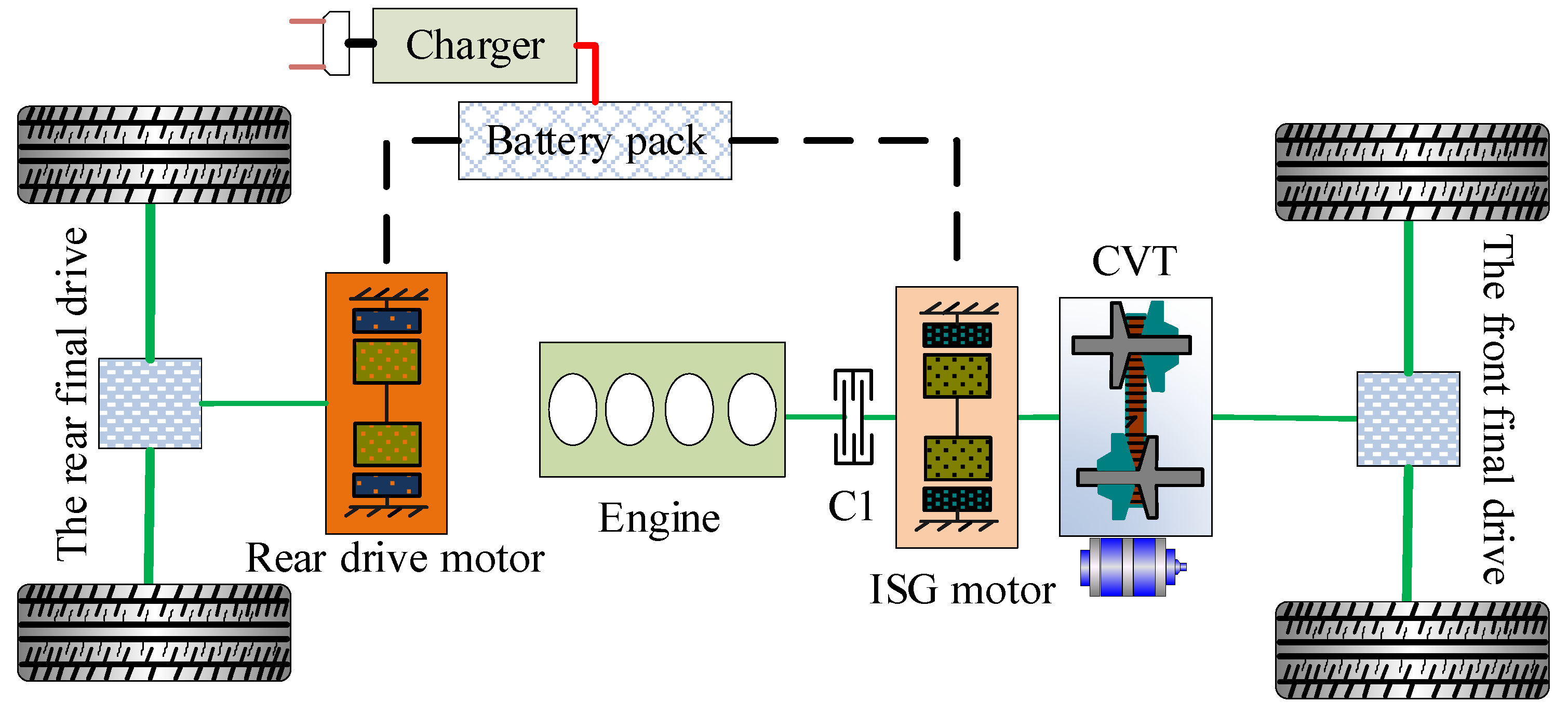
2.1. Structure of the Plug-In 4WD Hybrid Electric Vehicle
2.2. The Dynamic Model of the Powertrain
3. The Energy Management Strategy Based on the CD–CS Mode
3.1. CD Mode
3.2. CS Mode
3.3. The Braking Strategy
3.4. Strategy Validation
4. Mathematical Model of the Multi-Objective Optimization
5. Optimization Algorithm
6. Optimization Results and Analysis
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| CD | charge depleting |
| CS | charge sustain |
| CVT | a continuously variable transmission |
| 4WD | 4-wheel drive |
| PHEVs | plug-in hybrid electric vehicles |
| NSGA-II | Non-dominated Sorting Genetic Algorithms-II |
| A | the windward area, its unit is m2 |
| the acceleration at velocity step k, its unit is m/s2 | |
| road gradient | |
| the coefficient of air resistance | |
| the rolling resistance coefficient | |
| the 100 km electric energy consumption under CD stage, its unit is kwh/100 km | |
| the 100 km fuel consumption under CS stage, its unit is L/100 km | |
| the acceleration time from 0 to 120 km/h, its unit is s | |
| gear ratio | |
| control strategy parameter | |
| control strategy parameter | |
| the instantaneous fuel consumption, its unit is g/s | |
| the total steps for electric energy consumption simulation | |
| the total steps for fuel consumption simulation | |
| the total velocity steps | |
| the battery terminal power, its unit is kw | |
| the maximum power of engine, its unit is kw | |
| the maximum power of rear-drive motor, its unit is kw | |
| the maximum power of ISG motor, its unit is kw | |
| the nominal battery capacity, its unit is Ah | |
| the wheel’s radius, its unit is m | |
| the battery’s internal resistance, its unit is Ω | |
| the driving mileage in CD stage, its unit is km | |
| the driving mileage in CS stage, its unit is km | |
| the output torque of the engine, its unit is Nm | |
| the output torque of ISG motor, its unit is Nm | |
| the output torque of the rear-drive motor, its unit is Nm | |
| the vehicle speed, its unit is km/h | |
| the battery’s terminal voltage, its unit is V | |
| the angular speed, its unit is rad/s | |
| the efficiency of ISG motor | |
| the efficiency of the rear-drive motor |
References
- Hu, X.; Martinez, C.M.; Yang, Y. Charging, power management, and battery degradation mitigation in plug-in hybrid electric vehicles: A unified cost-optimal approach. Mech. Syst. Signal Process. 2017, 87, 4–16. [Google Scholar] [CrossRef]
- Yao, M.; Qin, D.; Zhou, X.; Zhan, S.; Zeng, Y. Integrated optimal control of transmission ratio and power split ratio for a CVT-based plug-in hybrid electric vehicle. Mech. Mach. Theory 2019, 136, 52–71. [Google Scholar] [CrossRef]
- Xie, S.; Li, H.; Xin, Z.; Liu, T.; Wei, L. A pontryagin minimum principle-based adaptive equivalent consumption minimum strategy for a plug-in hybrid electric bus on a fixed route. Energies 2017, 10, 1379. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Ye, M.; Qin, D.; Zhang, Y.; Lei, Z. Optimal energy management strategy for a plug-in hybrid electric vehicle based on road grade information. Energies 2017, 10, 412. [Google Scholar] [CrossRef]
- Roy, H.K.; McGordon, A.; Jennings, P.A. A generalized powertrain design optimization methodology to reduce fuel economy variability in hybrid electric vehicles. IEEE Trans. Veh. Technol. 2013, 63, 1055–1070. [Google Scholar] [CrossRef]
- Wang, Q.; Duan, B.; Wang, P.; Gong, Y.; Zhu, Q. Optimization of powertrain transmission parameters of plug-in hybrid electric vehicle. J. Jilin Univ. Technol. Ed. 2017, 47, 1–7. [Google Scholar]
- Zan, S.; Qin, D.; Zeng, Y. A study on the parameter optimization of hybrid electric vehicle based on multiple driving cycles. Automot. Eng. 2016, 38, 922–928. [Google Scholar]
- Lei, Z.; Cheng, D.; Liu, Y.; Qin, D.; Zhang, Y.; Xie, Q. A dynamic control strategy for hybrid electric vehicles based on parameter optimization for multiple driving cycles and driving pattern recognition. Energies 2017, 10, 54. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Qin, D.; Lei, Z.; Xie, Q.Y. Parameter optimization of hybrid electric vehicle based on multi-cycle optimization algorithm. J. Mech. Eng. 2017, 53, 61–69. [Google Scholar] [CrossRef]
- Shahverdi, M.; Mazzola, M.S.; Grice, Q.; Doude, M. Pareto front of energy storage size and series HEV fuel economy using bandwidth-based control strategy. IEEE Trans. Transp. Electrif. 2016, 2, 36–51. [Google Scholar] [CrossRef]
- Dimitrova, Z.; Marechal, F. Techno-economic design of hybrid electric vehicles and possibilities of the multi-objective optimization structure. Appl. Energy 2016, 161, 746–759. [Google Scholar] [CrossRef]
- Ribau, J.P.; Silva, C.M.; Sousa, J.M.C. Efficiency, cost and life cycle CO2 optimization of fuel cell hybrid and plug-in hybrid urban buses. Appl. Energy 2014, 129, 320–335. [Google Scholar] [CrossRef]
- Zeng, Y.; Qin, D.; Su, L.; Yao, M. Cost, fuel consumption and emission multi-objective parameter optimization for the powertrain of a Plug-in HEV. Automot. Eng. 2016, 38, 397–402. [Google Scholar]
- Huang, K.; Wang, Q.; Qiu, M.; Zhang, Y.; Liu, Z.; Geng, L. Parameter optimization of multi-mode hybrid vehicle considering mode-switching frequency. J. Xi’an Jiaotong Univ. 2019, 53, 1–8. [Google Scholar]
- Song, C.; Zhou, F.; Xiao, F.; Chang, C.; Shao, Y. Parameter matching of on-board hybrid energy storage system based on convex optimization method. J. Mech. Eng. 2017, 53, 44–51. [Google Scholar] [CrossRef]
- Reddy, S.S.; Bijwe, P.R. Multi-objective optimal power flow using efficient evolutionary algorithm. Int. J. Emerg. Electr. Power Syst. 2017, 18, 1–21. [Google Scholar] [CrossRef]
- Roghanian, E.; Sadjadi, S.J.; Aryanezhad, M.B. A probabilistic bi-level linear multi-objective programming problem to supply chain planning. Appl. Math. Comput. 2007, 188, 786–800. [Google Scholar] [CrossRef]
- Hsu, G.J.; Leung, P.S.; Ching, C.T. Energy planning in taiwan: An alternative approach using a multiobjective programming and input-output model. Energy J. 1988, 9, 53–72. [Google Scholar] [CrossRef]
- Osyczka, A. An approach to multicriterion optimization problems for engineering design. Comput. Methods Appl. Mech. Eng. 1978, 15, 309–333. [Google Scholar] [CrossRef]
- Steuer, R.E. Multiple criteria optimization: Theory, computation and application. J. Oper. Res. Soc. 1988, 39, 879. [Google Scholar]
- He, Y.; Mei, J.; Zang, J.; Xie, S.; Zhang, F. Multicriteria optimization design for end effector mounting bracket of a high speed and heavy load palletizing robot. Math. Probl. Eng. 2018, 2018, 6049635. [Google Scholar] [CrossRef]
- Zhang, X.; Song, X.; Qiu, W.; You, Y.; Deng, N. Multi-objective optimization of tension leg platform using evolutionary algorithm based on surrogate model. Ocean Eng. 2018, 148, 612–631. [Google Scholar] [CrossRef]
- Reddy, S.S.; Abhyankar, A.R.; Bijwe, P.R. Reactive power price clearing using multi-objective optimization. Energy 2011, 36, 3579–3589. [Google Scholar] [CrossRef]
- Reddy, S.S.; Bijwe, P.R. Differential evolution-based efficient multi-objective optimal power flow. Neural Comput. Appl. 2019, 31, 509–522. [Google Scholar] [CrossRef]
- Reddy, S.S. Multi-objective based congestion management using generation rescheduling and load shedding. IEEE Trans. Power Syst. 2017, 32, 852–863. [Google Scholar]
- Zeng, Y.; Cai, Y.; Kou, G.; Gao, W.; Qin, D. Energy management for plug-in hybrid electric vehicle based on adaptive Simplified-ECMS. Sustainability 2018, 10, 2060. [Google Scholar] [CrossRef]
- Zeng, Y.; Sheng, J.; Li, M. Adaptive real-time energy management strategy for plug-in hybrid electric vehicle based on Simplified-ECMS and a novel driving pattern recognition method. Math. Probl. Eng. 2018, 2018, 5816861. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Lang, K.; Qi, S.; Liu, T. Powering mode-integrated energy management strategy for a plug-in hybrid electric truck with an automatic mechanical transmission based on pontryagin’s minimum principle. Sustainability 2018, 10, 3758. [Google Scholar] [CrossRef]
- Zeng, Y.; Cai, Y.; Chu, C.; Kou, G.; Gao, W. Integrated Energy and Catalyst Thermal Management for Plug-In Hybrid Electric Vehicles. Energies 2018, 11, 1761. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Y.; Zhan, J.; Shang, F. Heuristic Dynamic Programming Based Online Energy Management Strategy for Plug-In Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 4479–4493. [Google Scholar] [CrossRef]
- Xiao, R.; Liu, B.; Shen, J.; Guo, N.; Yan, W.; Chen, Z. Comparisons of energy management methods for a parallel plug-in hybrid electric vehicle between the convex optimization and dynamic programming. Appl. Sci. 2018, 8, 218. [Google Scholar] [CrossRef]
- Moura, S.J.; Fathy, H.K.; Callaway, D.S.; Stein, J.L. A stochastic optimal control approach for power management in plug-In hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2011, 19, 545–555. [Google Scholar] [CrossRef]
- Fletcher, T.; Thring, R.; Watkinson, M. An Energy Management Strategy to concurrently optimise fuel consumption & PEM fuel cell lifetime in a hybrid vehicle. Int. J. Hydrogen Energy 2016, 41, 21503–21515. [Google Scholar] [Green Version]
- Wu, X.; Hu, X.; Yin, X.; Li, L.; Zeng, X.; Volker, P. Convex programming energy management and components sizing of a plug-in fuel cell urban logistics vehicle. J. Power Sources 2019, 423, 358–366. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Chen, Z.; Qin, D.; Zhang, Y. Research on a multi-objective hierarchical prediction energy management strategy for range extended fuel cell vehicles. J. Power Sources 2019, 429, 55–66. [Google Scholar] [CrossRef]
- Wang, H.; Huang, Y.; Khajepour, A.; Song, Q. Model predictive control-based energy management strategy for a series hybrid electric tracked vehicle. Appl. Energy 2016, 182, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Li, X.; Wang, W.; Han, L.; Xiang, X. Markov velocity predictor and radial basis function neural network-based real-time energy management strategy for plug-in hybrid electric vehicles. Energy 2018, 152, 427–444. [Google Scholar] [CrossRef]
- Zeng, X.; Wang, J. A parallel hybrid electric vehicle energy management strategy using stochastic model predictive control with road grade preview. IEEE Trans. Control Syst. Technol. 2015, 23, 1–15. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, X.; Pei, H.; Peng, Y. Comparison of power-split and parallel hybrid powertrain architectures with a single electric machine: Dynamic programming approach. Appl. Energy 2016, 168, 683–690. [Google Scholar] [CrossRef]
- Cipek, M.; Pavkovi, D.; Petri, J. A control-oriented simulation model of a power-split hybrid electric vehicle. Appl. Energy 2013, 101, 121–133. [Google Scholar] [CrossRef]
- Zhou, X.; Qin, D.; Hu, J. Multi-objective optimization design and performance evaluation for plug-in hybrid electric vehicle powertrains. Appl. Energy 2017, 208, 1608–1625. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Vehicle mass | 1590 kg |
| Windward area | 2.265 m2 |
| Tire radius | 0.307 m |
| Coefficient of air resistance | 0.0135 |
| Max power of the engine | 93 kW |
| Max power of the rear-drive motor | 55 kW |
| Max power of the ISG motor | 30 kW |
| Rated capacity of the battery | 30 Ah |
| Parameters | Descriptions | Range |
|---|---|---|
| Pe max/kw | Engine’s maximum power | [63, 120] |
| Pm max/kw | Rear-drive motor’s maximum power | [65, 110] |
| Pisg max/kw | ISG motor’s maximum power | [20, 60] |
| ifo | Speed ratio of the front final drive | [3.81, 6.92] |
| iro | Speed ratio of the rear final drive | [4.4, 8.68] |
| kup | Control strategy parameter | [0.1, 1] |
| klow | Control strategy parameter | [0.1, 1] |
| The Rear-Drive Motor | ISG Motor | |||
|---|---|---|---|---|
| 0.7 ≤ ηmot < 0.8 | ηmot ≥ 0.8 | 0.7 ≤ ηisg < 0.8 | ηisg ≥ 0.8 | |
| NDS-1 | 0.74 | 0.26 | 0.54 | 0.46 |
| NDS-3 | 0.63 | 0.37 | 0.37 | 0.63 |
| Pemax | Pmmax | Pisg max | ifo | iro | kup | klow | fele | ffuel | facc | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| NDS-1 | 118 | 102 | 49 | 6.32 | 7.52 | 0.69 | 0.33 | 13.98 | 6.94 | 6.5 | |
| NDS-3 | 66 | 66 | 22 | 6.9 | 7.24 | 0.7 | 0.97 | 11.63 | 5.43 | 9.1 | |
| NDS-4 | 65 | 67 | 21 | 3.87 | 5.95 | 0.12 | 0.79 | 12.17 | 4.33 | 10.2 | |
| Contrast | OS | 93 | 55 | 35 | 5.18 | 6.68 | 0.54 | 0.73 | 12.39 | 5.34 | 9.1 |
| NDS-2 | 72 | 73 | 30 | 5.26 | 7.42 | 0.71 | 0.78 | 12.24 | 5.01 | 8.6 | |
| Reduce by | -- | -- | -- | -- | -- | -- | -- | −1.21% | −6.18% | −5.49% | |
| Pemax | Pmmax | Pisg max | ifo | iro | kup | klow | fele | ffuel | facc | |
|---|---|---|---|---|---|---|---|---|---|---|
| NSGA-II approach | 72 | 73 | 30 | 5.26 | 7.42 | 0.71 | 0.78 | 12.24 | 5.01 | 8.6 |
| Weight approach | 87 | 60 | 25 | 5.89 | 7.06 | 0.51 | 0.53 | 11.82 | 5.27 | 8.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Cai, Y.; Zeng, Y.; Yu, J. Multi-Objective Optimization for Plug-In 4WD Hybrid Electric Vehicle Powertrain. Appl. Sci. 2019, 9, 4068. https://doi.org/10.3390/app9194068
Wang Z, Cai Y, Zeng Y, Yu J. Multi-Objective Optimization for Plug-In 4WD Hybrid Electric Vehicle Powertrain. Applied Sciences. 2019; 9(19):4068. https://doi.org/10.3390/app9194068
Chicago/Turabian StyleWang, Zhengwu, Yang Cai, Yuping Zeng, and Jie Yu. 2019. "Multi-Objective Optimization for Plug-In 4WD Hybrid Electric Vehicle Powertrain" Applied Sciences 9, no. 19: 4068. https://doi.org/10.3390/app9194068
APA StyleWang, Z., Cai, Y., Zeng, Y., & Yu, J. (2019). Multi-Objective Optimization for Plug-In 4WD Hybrid Electric Vehicle Powertrain. Applied Sciences, 9(19), 4068. https://doi.org/10.3390/app9194068