Validation of Acoustic Emission Waveform Entropy as a Damage Identification Feature

Abstract
:1. Introduction
2. Background
3. Materials and Methods
3.1. Disorderness as an AE Feature
3.2. Experimental Evaluation Procedure
3.2.1. Performance Against Threshold
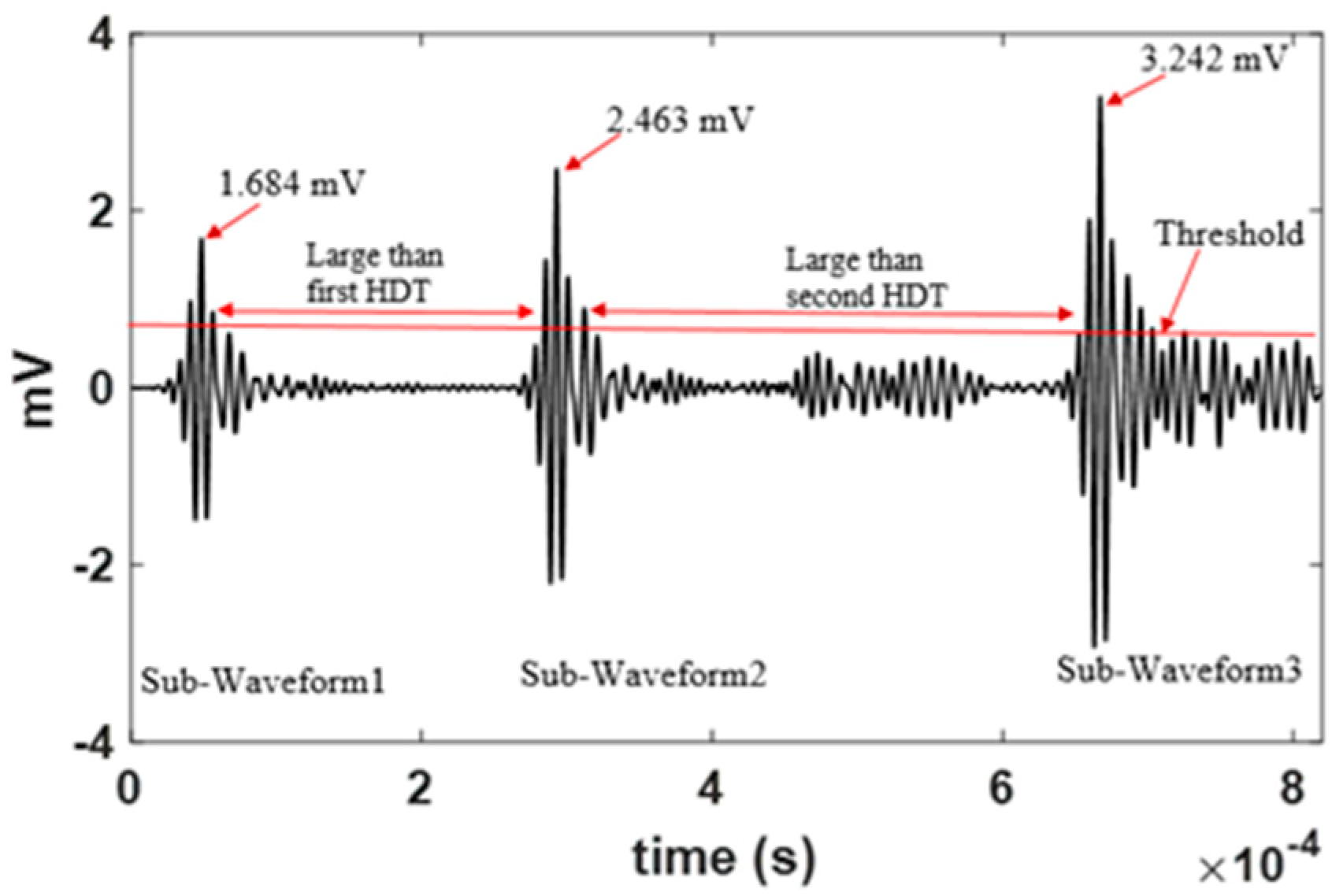
3.2.2. Performance Against Hit Definition Time
3.2.3. Experimental Validation Procedure
4. Experimental Results
4.1. Influence of Threshold on AE Entropy
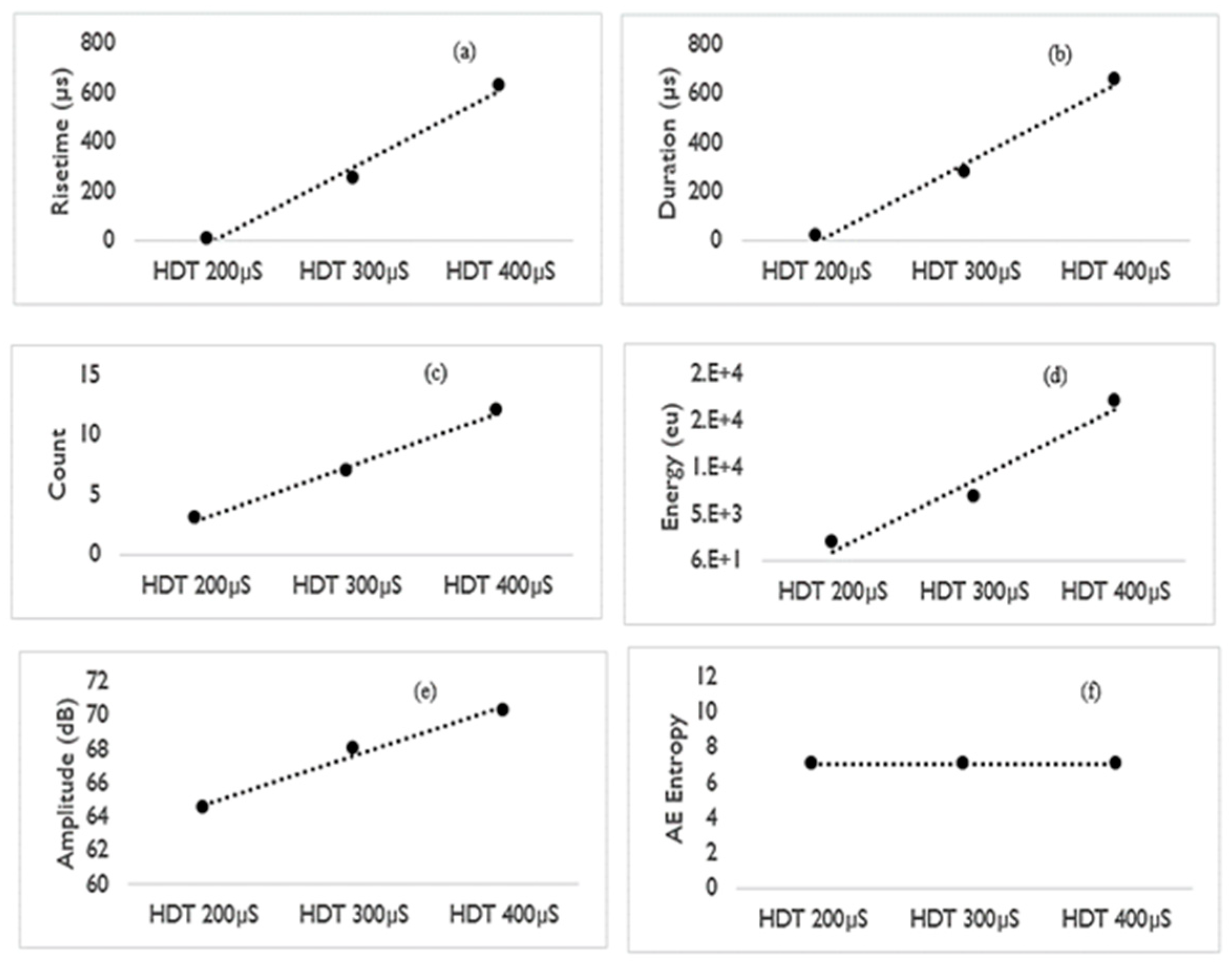
4.2. Influence of HDT on AE Entropy
5. Validation and Discussion
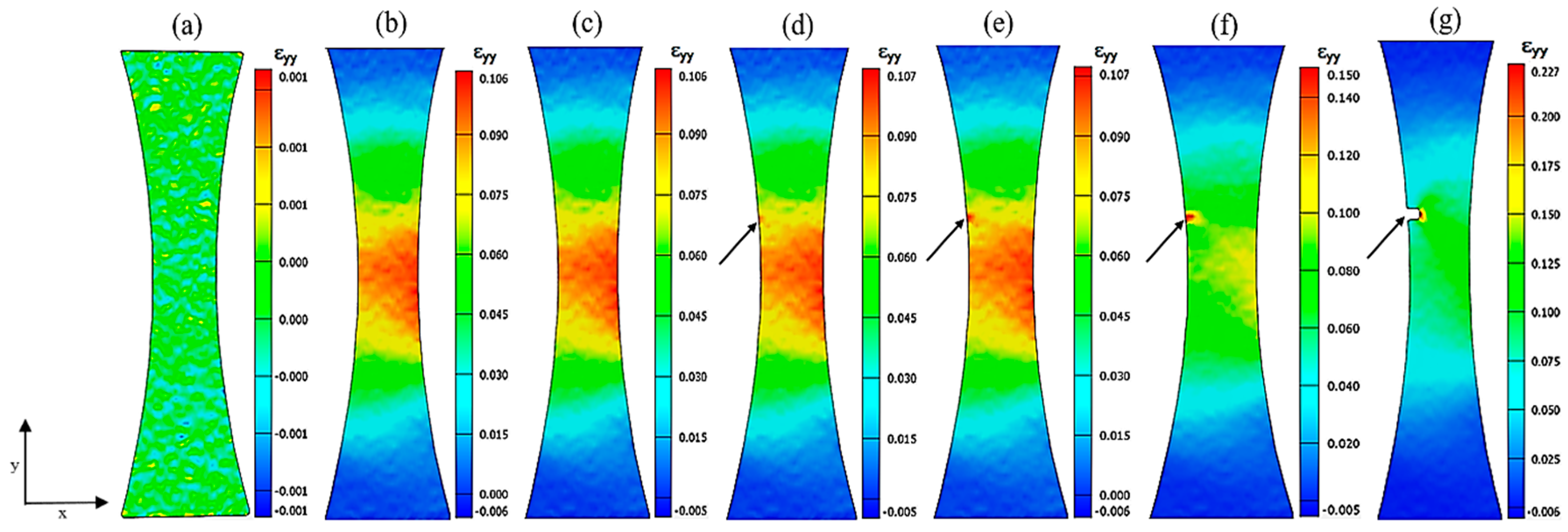
5.1. Tensile Test
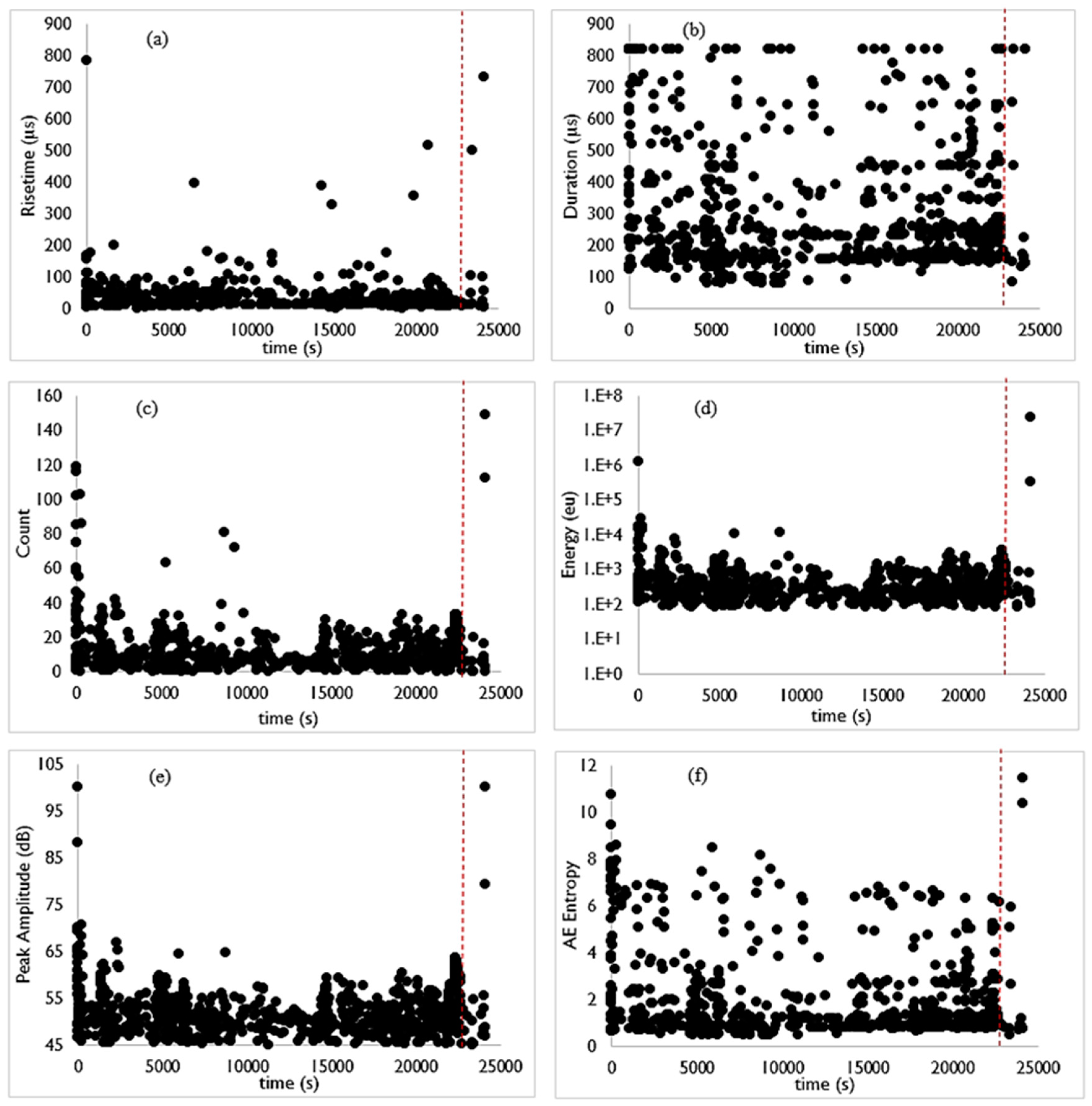
5.2. Fatigue Test
5.3. Correlation Between the Coupon Specimen and Real Structures under Operation
5.4. Effect of Noise on AE Eentropy
6. Conclusions
- The evaluation process adopted in this study suggests that AE entropy is independent of user-defined acquisition threshold and extracts the collective information from a waveform. This independency of AE entropy arises as it is directly calculated from the discrete voltage values, which are both in and outside the threshold.
- The evaluation process also suggests that AE entropy is independent of the user defined HDT. This is mainly because the computation of AE entropy takes into account the discrete voltage values in a waveform even after the expiration of HDT. This independency of AE entropy is an important property, as the loss of information from sub-waveforms occurring at different time intervals within a waveform can be avoided.
- In the tensile test, correlation AE entropy possessed the same trend as most of the widely used traditional AE features. From the onset of loading to just after yielding, there was plenty of AE activity due to dislocation movement; however, it did not have dominant AE entropy, whereas the fracture of the specimen was accompanied by a small number of AE activities, but it had dominant AE entropy.
- In the fatigue test, the yielding was accompanied by a dominant increase in correlation AE entropy. This suggests that AE entropy has the potential to provide indication regarding the yielding, which is considered to be a dominant damage mechanism in the primary wall. Since AE entropy is sensitive to yielding, it can be successfully implemented to monitor the primary wall against this damage mechanism. At the formation of plastic zone (identified by DIC), there is no noticeable increase in the AE entropy. This suggests that it may not be a suitable technique for the identification of plastic zones formed due to repeated cyclic loading.
- Compared to the yielding of the tensile specimen, the yielding of fatigue specimen was accompanied by dominant correlation AE entropy. This was due to an enhanced average velocity of the moving dislocation (vav), as a result of the higher strain rate (e) of fatigue specimens. Duration of the cyclic loading adopted in this study was comparable to the duration of the sloshing impact. Therefore, a strong sloshing impact has the potential to cause deformation in the primary wall with a high strain rate (than that of the strain rate of tensile test), which can produce dominant AE entropy.
- Both the cumulative count and AE entropy increased noticeably before the damage manifests into plastic zone formation. At the formation of a plastic zone (identified by DIC), there was a sharp increase in both of these cumulative features. A similar trend in these cumulative features suggest that the traditional analysis of cumulative count can be replaced with cumulative AE entropy in the experimental investigation of fatigue damage evaluation. Despite the potential of cumulative AE entropy to identify the fatigue damage evolution, it cannot be used to monitor the primary wall primarily because the sloshing impact on the primary wall is separated by zero pressure intervals. As a result, there might not be a noticeable change in the cumulative feature if the duration of zero pressure values increase during plastic zone formation.
- The majority of the disorderness in a waveform arises from micro-structural damage. As a result, there is no need to perform the de-noising of the waveform prior to the calculation of AE entropy.
Author Contributions
Funding
Conflicts of Interest
Appendix A
- represent the weight of the variable, such that ;
- is a strictly continuous monotonic function and is its inverse function. For arithmetic mean and .
- represents the discrete probability distribution of the voltage values with the kth number of bin;
- m represents the total number of bins;
- represents the number of bits need to represent the variable .


Appendix B
| Bins = −100:0.00305:100; |
| [h,bins] = hist(vecTR,bins); |
| H = h’; |
| A = bins’; |
| P = H./sum(H); |
| A = sum(p.^2); |
| H2(X) = −log2(A) |
References
- International Gas Union. World LNG Report; International Gas Union: Barcelona, Spain, 2018. [Google Scholar]
- Ryu, M.C.; Jung, H.; Kim, Y.S.; Kim, Y. Sloshing design load prediction of a membrane type LNG cargo containment system with two-row tank arrangement in offshore applications. Int. J. Nav. Archit. Ocean Eng. 2016, 8, 537–553. [Google Scholar] [CrossRef] [Green Version]
- Oh, M.-C.; Seo, J.-K.; Kim, K.-J.; Lee, S.-M.; Kim, M.-H. In Situ Measurement of Sloshing Impact on LNG Insulation Panel by using High Speed Fiber Optics. J. Intell. Mater. Syst. Struct. 2010, 21, 787–796. [Google Scholar] [CrossRef]
- Graczyk, M.; Moan, T.; Wu, M. Extreme sloshing and whipping-induced pressures and structural response in membrane LNG tanks Extreme sloshing and whipping-induced pressures and structural response in membrane LNG tanks. Ships Offshore Struct. 2007, 2, 201–216. [Google Scholar] [CrossRef]
- Park, J.-J.; Kim, S.-Y.; Kim, Y.; Seo, J.-H.; Jin, C.-H.; Joh, K.-H.; Kim, B.-W.; Suh, Y.-S. Study on tank shape for sloshing assessment of LNG vessels under unrestricted filling operation. J. Mar. Sci. Technol. 2015, 20, 640–651. [Google Scholar] [CrossRef]
- Lee, H.B.; Park, B.J.; Rhee, S.H.; Bae, J.H.; Lee, K.W.; Jeong, W.J. Liquefied natural gas flow in the insulation wall of a cargo containment system and its evaporation. Appl. Therm. Eng. J. 2011, 31, 2605–2615. [Google Scholar] [CrossRef]
- Sohn, J.; Bae, D.; Bae, S.; Paik, J. Nonlinear structural behaviour of membrane-type LNG carrier cargo containment systems under impact pressure loads at −163 °C. Ships Offshore Struct. 2016, 12, 722–733. [Google Scholar] [CrossRef]
- Choi, S.W.; Kim, H.S.; Lee, W.I. Analysis of leaked LNG flow and consequent thermal effect for safety in LNG cargo containment system. Ocean Eng. 2016, 113, 276–294. [Google Scholar] [CrossRef]
- Han, S. Assessing Structural Safety of Inner Hull Structure Under Cryogenic Temperature. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 1–7. [Google Scholar]
- International Maritime Organization. Resolution MSC.370(93) (Adopted on 22 May 2014); International Maritime Organization: London, UK, 2015.
- Gavory, T.; De Seze, P.E. Sloshing in membrane LNG carriers and its consequences from a designer’s perspective. In Proceedings of the Nineteenth International Offshore and Polar Engineering Conference, Osaka, Japan, 21–26 June 2009. [Google Scholar]
- Gowid, S.; Dixon, R.; Ghani, S. Profitability, reliability and condition based monitoring of LNG floating platforms: A review. J. Nat. Gas Sci. Eng. 2015, 27, 1495–1511. [Google Scholar] [CrossRef] [Green Version]
- Hellier, C. Handbook of Nondestructive Evaluation; McGraw-Hill: New York, NY, USA, 2013. [Google Scholar]
- Moorthy, V.; Jayakumar, T.; Raj, B. Acoustic emission technique for detecting micro- and macroyielding in solution-annealed AISI Type 316 austenitic stainless steel. Int. J. Press. Vessel. Pip. 1995, 64, 161–168. [Google Scholar] [CrossRef]
- Mukhopadhyay, C.K.; Ray, K.K.; Jayakumar, T.; Raj, B. Acoustic emission from tensile deformation of unnotched and notched specimens of AISI type 304 stainless steels. Mater. Sci. Eng. A 1998, 255, 98–106. [Google Scholar] [CrossRef]
- Mukhopadhyay, C.K.; Jayakumar, T.; Raj, B.; Ray, K.K. The influence of notch on the acoustic emission generated during tensile testing of nuclear grade AISI type 304 stainless steel. Mater. Sci. Eng. A 2000, 276, 83–90. [Google Scholar] [CrossRef]
- Mukhopadhyay, C.K.; Jayakumar, T.; Raj, B.; Ray, K.K. Acoustic emission-stress intensity factor relations for tensile deformation of notched specimens of AISI type 304 stainless steel. Mater. Sci. Eng. A 2000, 293, 137–145. [Google Scholar] [CrossRef]
- Mukhopadhyay, C.K.; Jayakumar, T.; Raj, B.; Ray, K.K. Acoustic emission during tensile deformation of pre-strained nuclear grade AISI type 304 stainless steel in the unnotched and notched conditions. J. Mater. Sci. 2007, 42, 5647–5656. [Google Scholar] [CrossRef]
- Mukhopadhyay, C.K.; Kasiviswanathan, K.V.; Jayakumar, T.; Raj, B. Acoustic emission during tensile deformation of annealed and cold-worked AISI type 304 austenitic stainless steel. J. Mater. Sci. 1993, 28, 145–154. [Google Scholar] [CrossRef]
- Venkataraman, B.; Mukhopadhyay, C.K.; Raj, B. Effect of variation of strain rate on thermal and acoustic emission during tensile deformation of nuclear grade AISI type 316 stainless steel. Mater. Sci. Technol. 2004, 20, 1310–1316. [Google Scholar] [CrossRef]
- Barat, K.; Bar, H.N.; Mandal, D.; Roy, H.; Sivaprasad, S.; Tarafder, S. Low temperature tensile deformation and acoustic emission signal characteristics of AISI 304LN stainless steel. Mater. Sci. Eng. A 2014, 597, 37–45. [Google Scholar] [CrossRef]
- Haneef, T.; Lahiri, B.B.; Bagavathiappan, S.; Mukhopadhyay, C.K.; Philip, J.; Rao, B.P.C.; Jayakumar, T. Study of the tensile behavior of AISI type 316 stainless steel using acoustic emission and infrared thermography techniques. Integr. Med. Res. 2015, 4, 241–253. [Google Scholar] [CrossRef] [Green Version]
- Máthis, K.; Prchal, D.; Novotny´b, R.; Novotny´b, N.; Hähner, P. Acoustic emission monitoring of slow strain rate tensile tests of 304L stainless steel in supercritical water environment. Corros. Sci. 2011, 53, 59–63. [Google Scholar] [CrossRef]
- Raj, B. Acoustic Emission Technique for Characterizing Deformation and Fatigue Crack Growth in Austenitic Stainless Steels. AIP Conf. Proc. 2003, 22, 1439–1446. [Google Scholar]
- Carpinteri, A.; Lacidogna, G.; Pugno, N. Structural damage diagnosis and life-time assessment by acoustic emission monitoring. Eng. Fract. Mech. 2007, 74, 273–289. [Google Scholar] [CrossRef]
- Carpinteri, A.; Xu, J.; Lacidogna, G.; Manuello, A. Reliable onset time determination and source location of acoustic emissions in concrete structures. Cem. Concr. Compos. 2012, 34, 529–537. [Google Scholar] [CrossRef]
- Anzani, A.; Binda, L.; Carpinteri, A.; Lacidogna, G.; Manuello, A. Evaluation of the repair on multiple leaf stone masonry by acoustic emission. Mater. Struct. Constr. 2008, 41, 1169–1189. [Google Scholar] [CrossRef]
- Kiesewetter, N.; Schiller, P. The acoustic emission from moving dislocations in aluminium. Phys. Status Solidi 1976, 38, 569–576. [Google Scholar] [CrossRef]
- Lee, S.E.; Kim, B.J.; Seo, J.K.; Ha, Y.C.; Matsumoto, T.; Byeon, S.H.; Paik, J.K. Toshiyuki Matsumoto. Nonlinear impact response analysis of LNG FPSO cargo tank structures under sloshing loads. Ships Offshore Struct. 2015, 10, 510–532. [Google Scholar]
- Hartley, R.V.L. Transmission Information. Bell Syst. Tech. J. 1928, 7, 535–563. [Google Scholar] [CrossRef]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 623–656. [Google Scholar] [CrossRef]
- Renyi, A. On measures of entropy and information. In Proceedings of the Fourth Berkeley Symposium on Mathematical Statistics and Probability, Berkeley, CA, USA, 20 June–30 July 1960; Volume 1, pp. 457–561. [Google Scholar]
- Cornforth, D.J.; Tarvainen, M.P.; Jelinek, H.F. How to Calculate Renyi Entropy from Heart Rate Variability, and Why it Matters for Detecting Cardiac Autonomic Neuropathy. Front. Bioeng. Biotechnol. 2014, 2, 34. [Google Scholar] [CrossRef]
- Coles, P.J.; Berta, M.; Tomamichel, M.; Wehner, S. Entropic uncertainty relations and their applications. Rev. Mod. Phys. 2017, 89, 015002. [Google Scholar] [CrossRef] [Green Version]
- Vinga, S.; Almeida, J.S. Rényi continuous entropy of DNA sequences. J. Theor. Biol. 2004, 231, 377–388. [Google Scholar] [CrossRef]
- ASTM. ASTM E976-15 Standard Guide for Determining the Reproducibility of Acoustic Emission Sensor Response; ASTM: West Conshohocken, PA, USA, 2015. [Google Scholar]
- AE-Sensor Data Sheet VS900-RIC. Available online: http://www.vallen.de/quote-ref (accessed on 11 July 2019).
- AMSY-6 System Description. 2015. Available online: http://www.vallen.de (accessed on 11 July 2019).
- Moradian, Z.; Li, B.Q. Hit-based acoustic emission monitoring of rock fractures: Challenges and solutions. Springer Proc. Phys. 2017, 179, 357–370. [Google Scholar]
- ASTM. ASTM E8M-13a-Standard Test Methods for Tension Testing of Metallic Materials; ASTM: West Conshohocken, PA, USA, 2009. [Google Scholar]
- ASTM. ASTM E466-15, Practice for Conducting Force Controlled Constant Amplitude Axial Fatigue Tests of Metallic Materials; ASTM: West Conshohocken, PA, USA, 2015. [Google Scholar]
- AE-Sensor Data Sheet VS160-NS. Available online: http://www.vallen.de/quote-ref (accessed on 11 July 2019).
- Acoustic Emission Preamplifiers Specification. 2017. Available online: http://www.vallen (accessed on 11 July 2019).
- Barsoum, F.F.; Suleman, J.; Korcak, A.; Hill, E.V.K. Acoustic emission monitoring and fatigue life prediction in axially loaded notched steel specimen. J. Acoust. Emiss. 2009, 27, 40–63. [Google Scholar]
- ARAMIS 3D Camera | GOM. Available online: https://www.gom.com/metrology-systems/aramis/aramis-3d-camera.html (accessed on 11 July 2019).
- Chai, M.; Zhang, J.; Zhang, Z.; Duan, Q.; Cheng, G. Acoustic emission studies for characterization of fatigue crack growth in 316LN stainless steel and welds. Appl. Acoust. 2017, 126, 101–113. [Google Scholar] [CrossRef]
- Sangid, M.D. The physics of fatigue crack initiation. Int. J. Fatigue 2013, 57, 58–72. [Google Scholar] [CrossRef]
- Fang, D.; Berkovits, A. Fatigue design model dased on damage mechanism revealed by acoustic emission measurement. ASME J. Eng. Mater. Technol. 1995, 117, 200–208. [Google Scholar] [CrossRef]
- Ono, K.; Cho, H.; Takuma, M. The origin of continuous emissions. J. Acoust. Emiss. 2005, 23, 206–214. [Google Scholar]
- Han, Z.; Luo, H.; Cao, J.; Wang, H. Acoustic emission during fatigue crack propagation in a micro-alloyed steel and welds. Mater. Sci. Eng. A 2011, 528, 7751–7756. [Google Scholar] [CrossRef]
- Amer, A.O.; Gloanec, A.L.; Courtin, S.; Touze, C. Characterization of fatigue damage in 304L steel by an acoustic emission method. Procedia Eng. 2013, 66, 651–660. [Google Scholar] [CrossRef]
- Graczyk, M.; Moan, T. A probabilistic assessment of design sloshing pressure time histories in LNG tanks. Ocean Eng. 2008, 35, 834–855. [Google Scholar] [CrossRef]
- Sinclair, A.C.E.; Connors, D.C. Acoustic Emission Analysis during Fatigue Crack Growth in Steel. Mater. Sci. Eng. 1977, 28, 263. [Google Scholar] [CrossRef]
- DNV GL. Class Guideline: Sloshing Analysis of LNG Membrane Tanks; DNV GL: Oslo, Norway, 2016. [Google Scholar]
- Paik, J.K.; Lee, J.M.; Shin, Y.S.; Wang, G. Design Principles and Criteria for Ship Structures under Impact Pressure Loads Arising from Sloshing, Slamming and Green Seas. Trans. SNAME 2004, 112, 292–313. [Google Scholar]
- Pattnaik, A.B.; Jha, B.B.; Sahoo, R. Effect of strain rate on acoustic emission during tensile deformation of α -brass. Mater. Sci. Technol. 2013, 29, 294–299. [Google Scholar] [CrossRef]
- Hamstad, M.A.; Mukherjee, A.K. The dependence of acoustic emission on strain rate in 7075-T6 aluminum. Exp. Mech. 1974, 14, 33–41. [Google Scholar] [CrossRef]
- Han, Z.; Luo, H.; Wang, H. Effects of strain rate and notch on acoustic emission during the tensile deformation of a discontinuous yielding material. Mater. Sci. Eng. A 2011, 528, 4372–4380. [Google Scholar] [CrossRef]
- Raj, B.; Jayakumar, T. Acoustic Emission During Tensile Deformation and Fracture in Austenitic Alloys. In Acoustic Emission: Current Practice and Future Directions; Sachse, W., Yamaguchi, K., Roget, J., Eds.; ASTM International: West Conshohocken, PA, USA, 1991; pp. 218–241. [Google Scholar]
- Raj, B.; Jha, B.B.; Rodriguez, P. Frequency spectrum analysis of acoustic emission signal obtained during tensile deformation and fracture of an AISI 316 type stainless steel. Acta Metall. 1989, 37, 2211–2215. [Google Scholar] [CrossRef]
- Heiple, C.R.; Carpenter, S.H. Acoustic emission produced by deformation of metals and alloys—A review. J. Acoust. Emiss. 1987, 6, 177–204. [Google Scholar]
- Roberts, T.M.; Talebzadeh, M. Fatigue life prediction based on crack propagation and acoustic emission count rates. J. Constr. Steel Res. 2003, 59, 679–694. [Google Scholar] [CrossRef]
- Roberts, T.M.; Talebzadeh, M. Acoustic emission monitoring of fatigue crack propagation. J. Constr. Steel Res. 2003, 59, 695–712. [Google Scholar] [CrossRef]
- Kohn, D.H.; Ducheyne, P.; Awerbuch, J. Acoustic emission during fatigue of Ti-6Al-4V: Incipient fatigue crack detection limits and generalized data analysis methodology. J. Mater. Sci. 1992, 27, 3133–3142. [Google Scholar] [CrossRef] [Green Version]
- Gagar, D.; Foote, P.; Irving, P.E. Effects of loading and sample geometry on acoustic emission generation during fatigue crack growth: Implications for structural health monitoring. Int. J. Fatigue 2015, 81, 117–127. [Google Scholar] [CrossRef]
- Chai, M.; Zhang, Z.; Duan, Q. A new qualitative acoustic emission parameter based on Shannon’s entropy for damage monitoring. Mech. Syst. Signal Process. 2018, 100, 617–629. [Google Scholar] [CrossRef]
- Kharrat, M.; Ramasso, E.; Placet, V.; Boubakar, M.L. A signal processing approach for enhanced Acoustic Emission data analysis in high activity systems: Application to organic matrix composites. Mech. Syst. Signal Process. 2016, 70–71, 1038–1055. [Google Scholar] [CrossRef]
- Grosse, C.U.; Reinhardt, H.W.; Motz, M.; Kroplin, B. Signal conditioning in acoustic emission analysis using wavelets. NDT.net 2002, 7, 1–9. [Google Scholar]
- Bruevich, E.A.; Bruevich, V.V.; Yakunina, G.V. The study of time series of monthly averaged values of F10.7 from 1950 to 2010. arXiv 2014, arXiv:1401.7033. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | Threshold (dB) |
|---|---|
| 1 | 45 |
| 2 | 50 |
| 3 | 55 |
| 4 | 60 |
| 5 | 65 |
| 6 | 70 |
| Hit Definition Time (HDT) | 80 μs |
|---|---|
| Re-Arm Time | 1 ms |
| Sampling Frequency | 5 MHz |
| Max duration TR window length | 820 μs |
| Frequency Filter | 95k Hz–850 kHz |
| Threshold | 60 dB |
| Acquisition | HDT |
|---|---|
| 1 | 200 µs |
| 2 | 300 µs |
| 3 | 400 µs |
| Properties | Values |
|---|---|
| Young’s Modulus | 193 GPa |
| Yield Strength (Longitudinal) Rp 1% | 347 MPa |
| Tensile Strength (Longitudinal) | 613 MPa |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santo, F.T.; Sattar, T.P.; Edwards, G. Validation of Acoustic Emission Waveform Entropy as a Damage Identification Feature. Appl. Sci. 2019, 9, 4070. https://doi.org/10.3390/app9194070
Santo FT, Sattar TP, Edwards G. Validation of Acoustic Emission Waveform Entropy as a Damage Identification Feature. Applied Sciences. 2019; 9(19):4070. https://doi.org/10.3390/app9194070
Chicago/Turabian StyleSanto, Farhan Tanvir, Tariq Pervez Sattar, and Graham Edwards. 2019. "Validation of Acoustic Emission Waveform Entropy as a Damage Identification Feature" Applied Sciences 9, no. 19: 4070. https://doi.org/10.3390/app9194070
APA StyleSanto, F. T., Sattar, T. P., & Edwards, G. (2019). Validation of Acoustic Emission Waveform Entropy as a Damage Identification Feature. Applied Sciences, 9(19), 4070. https://doi.org/10.3390/app9194070