Improving Accuracy and Reliability of Bluetooth Low-Energy-Based Localization Systems Using Proximity Sensors


Abstract
:1. Introduction
1.1. Indoor Localization Systems
1.2. Hybrid Localization Systems
2. Hybrid Localization Concept
- a tag, which is worn by the user
- an infrastructure comprising a set of BLE anchors and proximity sensors
- a system controller
3. Localization Algorithm
- the user is not in the area covered by any of the proximity sensors and is localized using only BLE RSS measurement results (Extended Kalman Filter based algorithm),
- the user’s tag is off or disabled and he is localized based solely on ranging data,
- the user wears the tag as normal and is present in at least one of the proximity sensors beams (hybrid algorithm in one of two versions: loosely or tightly coupled).
3.1. BLE Based Algorithm
- is the predicted state vector value,
- is the state vector value obtained in the previous EKF iteration,
- and are the state covariance matrices of the above vectors,
- F is the state transition matrix containing the movement model,
- Q is the process noise covariance matrix.
- is the measurement vector containing RSS () measurement results,
- is the sensor model used to calculate measurement values which would be obtained for the predicted tag localization,
- is a linearization of the sensor model,
- is the Kalman gain ,
- is the measurement covariance matrix.
- is the signal power received by the anchor n,
- d is the distance between the anchor and predicted tag localization,
- is the received power at the reference distance from the tag ,
- is the path-loss exponent.
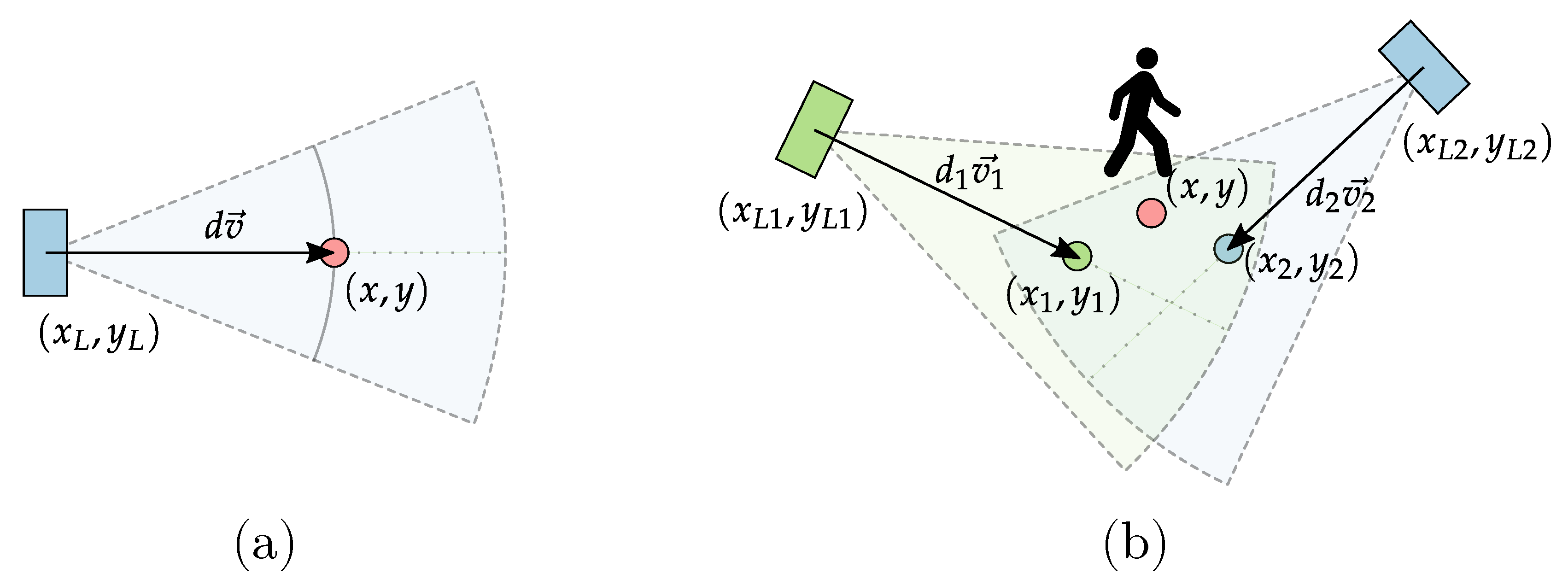
3.2. Proximity Sensors Based Localization
3.3. Loosely Coupled Hybrid Algorithm
3.4. Tightly Coupled Hybrid Algorithm
4. Simulations
4.1. Simulation Environment
- is the power received by the anchor from the tag
- is the power received at the reference distance (1 m) (assumed −52 dB)
- is the path loss exponent (assumed 2.4)
- d is the distance between the tag and the anchor
- I is the number of different wall types in the simulated area
- is the number of walls of type i
- is the attenuation due to traversed wall of type i
- is the log-normal random component present due to the shadowing effects and the receiver noise (3 dB standard deviation)
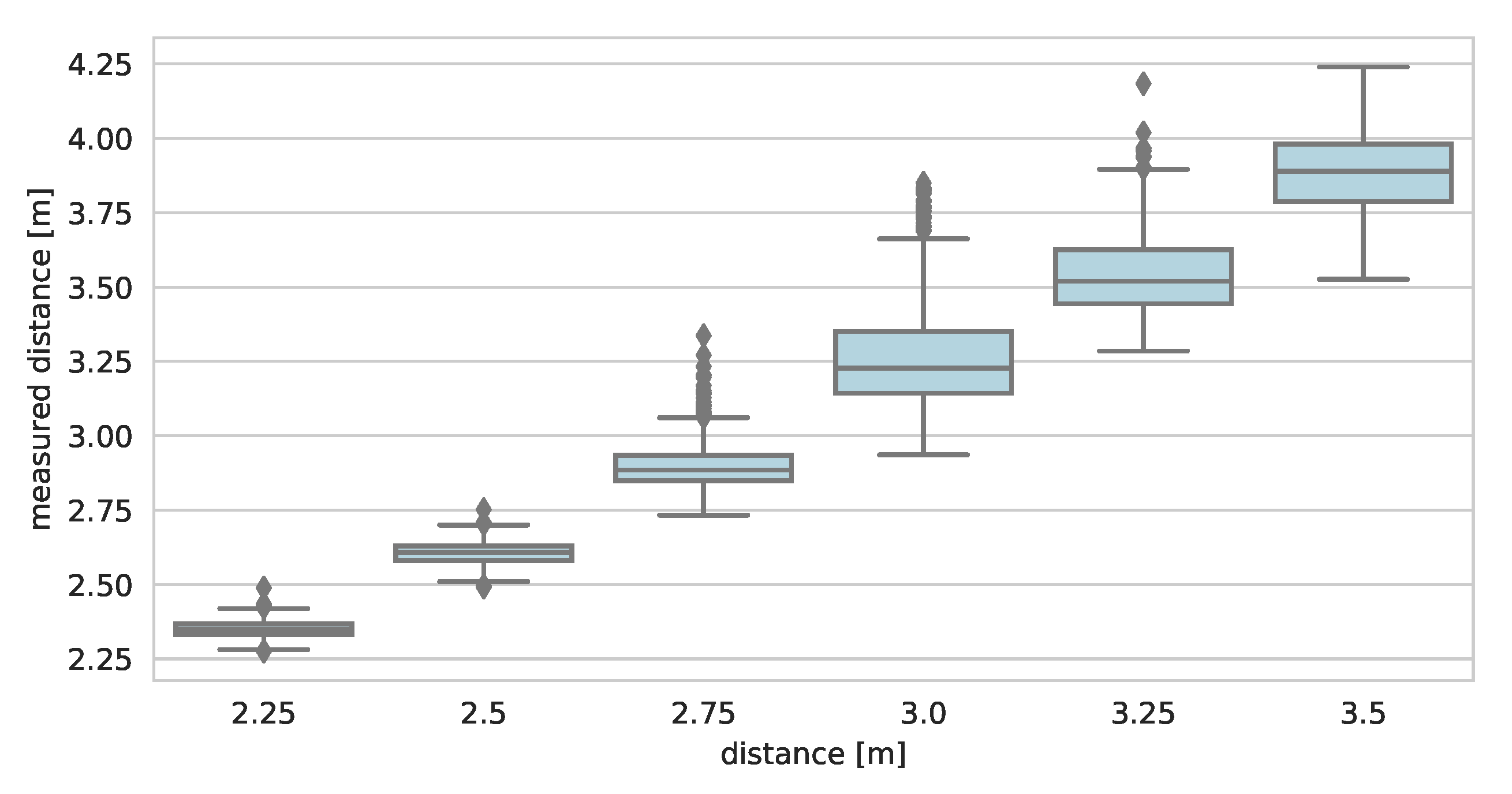
- d is the distance between the localized person and the sensor,
- is the measurement white noise of standard deviation calculated based on standard deviation model. The assumed deviation model was: . According to the model, standard deviation rises with distance, which reflects less accurate measurements due to a lower level of reflected signals.
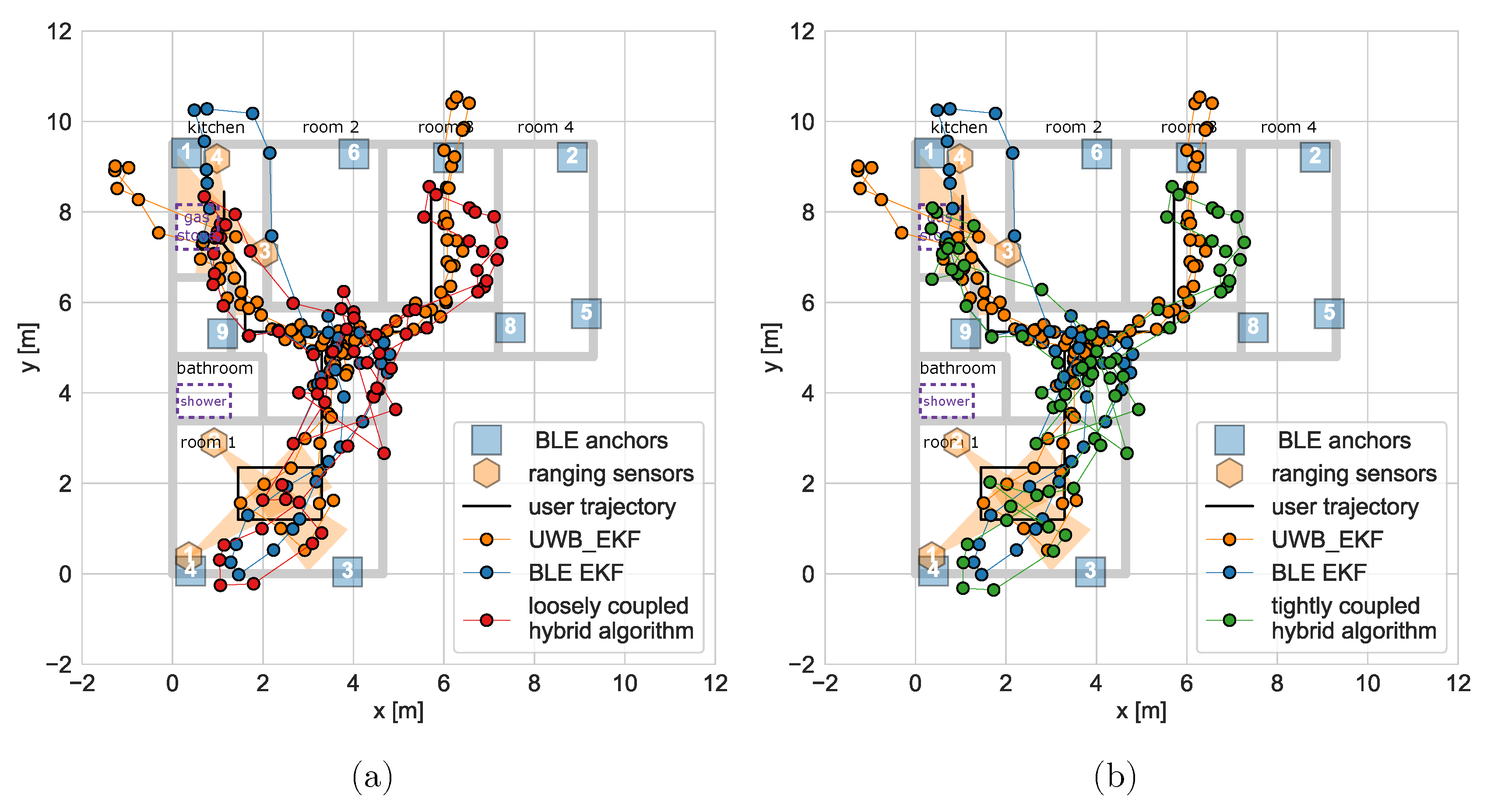
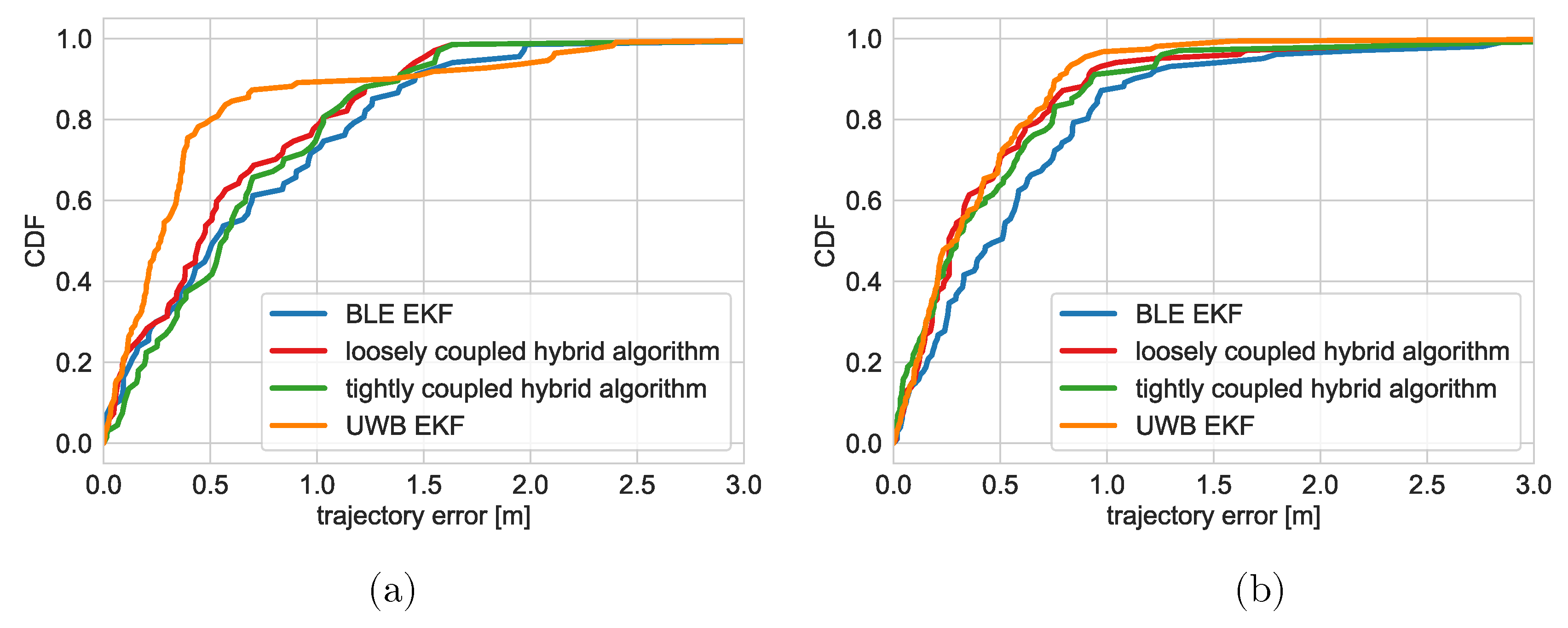
4.2. Performed Simulations
5. Experiments
5.1. Properties of VL53L1X Proximity Sensor
- person in a black shirt (blinds closed)
- bare-chested person (blinds closed)
- person in a white shirt (blinds closed)
- person in a black shirt (blinds opened)
5.2. Hybrid Localization Concept Verification
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AAL | Ambient and Assisted Living |
| UWB | ultra-wideband |
| ToA | Time of Arrival |
| TDoA | Time Difference of Arrival |
| BLE | Bluetooth Low Energy |
| EKF | Extended Kalman Filter |
| ToF | Time of Flight |
| FoV | field of view |
| SPAD | Single-photon avalanche diode |
| LOS | Line of Sight |
| OLOS | Obstructed Line of Sight |
| NLOS | Non Line of Sight |
| RSS | Received Signal Strength |
References
- European Commission; Directorate-General for Economic and Financial Affairs; Economic Policy Committee of the European Communities. The 2018 Ageing Report: Underlying Assumptions and Projection Methodologies; OCLC: 1013458008; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- Dawson, A.; Bowes, A.; Kelly, F.; Velzke, K.; Ward, R. Evidence of What Works to Support and Sustain Care at Home for People with Dementia: A Literature Review with a Systematic Approach. BMC Geriatr. 2015, 15, 59. [Google Scholar] [CrossRef] [PubMed]
- Barsocchi, P.; Potortì, F.; Furfari, F.; Gil, A.M.M. Comparing AAL Indoor Localization Systems. In Evaluating AAL Systems Through Competitive Benchmarking. Indoor Localization and Tracking; Springer: Berlin/Heidelberg, Germany, 2011; pp. 1–13. [Google Scholar] [CrossRef]
- Lin, Q.; Zhang, D.; Chen, L.; Ni, H.; Zhou, X. Managing Elders’ Wandering Behavior Using Sensors-Based Solutions: A Survey. Int. J. Gerontol. 2014, 8, 49–55. [Google Scholar] [CrossRef]
- Yang, C.; Shao, H.R. WiFi-Based Indoor Positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Cantón Paterna, V.; Calveras Augé, A.; Paradells Aspas, J.; Pérez Bullones, M.A. A Bluetooth Low Energy Indoor Positioning System with Channel Diversity, Weighted Trilateration and Kalman Filtering. Sensors 2017, 17, 2927. [Google Scholar] [CrossRef] [PubMed]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- DecaWave Ltd. DW1000 User Manual; Decawave Ltd.: Dublin, Ireland, 2015. [Google Scholar]
- Minne, K.; Macoir, N.; Rossey, J.; Van den Brande, Q.; Lemey, S.; Hoebeke, J.; De Poorter, E. Experimental Evaluation of UWB Indoor Positioning for Indoor Track Cycling. Sensors 2019, 19, 2041. [Google Scholar] [CrossRef] [PubMed]
- Kolakowski, J.; Djaja-Josko, V.; Kolakowski, M. UWB Monitoring System for AAL Applications. Sensors 2017, 17, 2092. [Google Scholar] [CrossRef] [PubMed]
- Dimension4 | Ubisense. Available online: https://www.ubisense.net/product/dimension4 (accessed on 30 September 2019).
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutorials 2016, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Mussina, A.; Aubakirov, S. RSSI Based Bluetooth Low Energy Indoor Positioning. In Proceedings of the 2018 IEEE 12th International Conference on Application of Information and Communication Technologies (AICT), Almaty, Kazakhstan, 17–19 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Yiu, S.; Dashti, M.; Claussen, H.; Perez-Cruz, F. Wireless RSSI Fingerprinting Localization. Signal Process. 2017, 131, 235–244. [Google Scholar] [CrossRef]
- Wang, B.; Chen, Q.; Yang, L.T.; Chao, H.C. Indoor Smartphone Localization via Fingerprint Crowdsourcing: Challenges and Approaches. IEEE Wirel. Commun. 2016, 23, 82–89. [Google Scholar] [CrossRef]
- Lott, M.; Forkel, I. A Multi-Wall-and-Floor Model for Indoor Radio Propagation. In Proceedings of the IEEE VTS 53rd Vehicular Technology Conference, Spring 2001. Proceedings (Cat. No.01CH37202), Rhodes, Greece, 6–9 May 2001; Volume 1, pp. 464–468. [Google Scholar] [CrossRef]
- Kim, M.; Chong, N.Y. Direction Sensing RFID Reader for Mobile Robot Navigation. IEEE Trans. Autom. Sci. Eng. 2009, 6, 44–54. [Google Scholar] [CrossRef]
- Chen, H.X.; Hu, B.J.; Zheng, L.L.; Wei, Z.H. An Accurate AoA Estimation Approach for Indoor Localization Using Commodity Wi-Fi Devices. In Proceedings of the 2018 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Qingdao, China, 14–16 September 2018; IEEE: Qingdao, China, 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, R.; Liu, J.; Du, X.; Li, B.; Guizani, M. AOA-Based Three-Dimensional Multi-Target Localization in Industrial WSNs for LOS Conditions. Sensors 2018, 18, 2727. [Google Scholar] [CrossRef] [PubMed]
- Hou, Y.; Yang, X.; Abbasi, Q.H. Efficient AoA-Based Wireless Indoor Localization for Hospital Outpatients Using Mobile Devices. Sensors 2018, 18, 3698. [Google Scholar] [CrossRef] [PubMed]
- Baik, K.J.; Lee, S.; Jang, B.J. Hybrid RSSI-AoA Positioning System with Single Time-Modulated Array Receiver for LoRa IoT. In Proceedings of the 2018 48th European Microwave Conference (EuMC), Madrid, Spain, 23–27 September 2018; IEEE: Madrid, Spain, 2018; pp. 1133–1136. [Google Scholar] [CrossRef]
- Wann, C.-D.; Yeh, Y.-J.; Hsueh, C.-S. Hybrid TDOA/AOA Indoor Positioning and Tracking Using Extended Kalman Filters. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, VIC, Australia, 7–10 May 2006; IEEE: Melbourne, Australia, 2006; Volume 3, pp. 1058–1062. [Google Scholar] [CrossRef]
- Kumarasiri, R.; Alshamaileh, K.; Tran, N.H.; Devabhaktuni, V. An Improved Hybrid RSS/TDOA Wireless Sensors Localization Technique Utilizing Wi-Fi Networks. Mob. Netw. Appl. 2016, 21, 286–295. [Google Scholar] [CrossRef]
- Jadidi, M.G.; Patel, M.; Miro, J.V.; Dissanayake, G.; Biehl, J.; Girgensohn, A. A Radio-Inertial Localization and Tracking System with BLE Beacons Prior Maps. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; IEEE: Nantes, France, 2018; pp. 206–212. [Google Scholar] [CrossRef] [Green Version]
- Huang, K.; He, K.; Du, X. A Hybrid Method to Improve the BLE-Based Indoor Positioning in a Dense Bluetooth Environment. Sensors 2019, 19, 424. [Google Scholar] [CrossRef] [PubMed]
- Kolakowski, M. Utilizing Acceleration Measurements to Improve TDOA Based Localization. In Proceedings of the 2017 Signal Processing Symposium (SPSympo), Jachranka, Poland, 12–14 September 2017; IEEE: Jachranka Village, Poland, 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Kao, C.H.; Hsiao, R.S.; Chen, T.X.; Chen, P.S.; Pan, M.J. A Hybrid Indoor Positioning for Asset Tracking Using Bluetooth Low Energy and Wi-Fi. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics— Taiwan (ICCE-TW), Taipei, Taiwan, 12–14 June 2017; IEEE: Taipei, Taiwan, 2017; pp. 63–64. [Google Scholar] [CrossRef]
- Antevski, K.; Redondi, A.E.C.; Pitic, R. A Hybrid BLE and Wi-Fi Localization System for the Creation of Study Groups in Smart Libraries. In Proceedings of the 2016 9th IFIP Wireless and Mobile Networking Conference (WMNC), Colmar, France, 11–13 July 2016; IEEE: Colmar, France, 2016; pp. 41–48. [Google Scholar] [CrossRef]
- Kolakowski, M. Kalman Filter Based Localization in Hybrid BLE-UWB Positioning System. In Proceedings of the 2017 IEEE International Conference on RFID Technology & Application (RFID-TA), Warsaw, Poland, 20–22 September 2017; IEEE: Warsaw, Poland, 2017; pp. 290–293. [Google Scholar] [CrossRef]
- Kolakowski, M. A Hybrid BLE/UWB Localization Technique with Automatic Radio Map Creation. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–4. [Google Scholar]
- Kherani, A.A.; Bhogi, S.K.; Shin, B. Hybrid Location Tracking in BLE Beacon Systems with In-Network Coordination. In Proceedings of the 2016 13th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2016; IEEE: Las Vegas, NV, USA, 2016; pp. 814–815. [Google Scholar] [CrossRef]
- Sosa-Sesma, S.; Perez-Navarro, A. Fusion System Based on WiFi and Ultrasounds for In-Home Positioning Systems: The UTOPIA Experiment. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; IEEE: Alcala de Henares, Spain, 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Petryk, G.; Buehler, M. Dynamic Object Localization via a Proximity Sensor Network. In Proceedings of the 1996 IEEE/SICE/RSJ International Conference on Multisensor Fusion and Integration for Intelligent Systems (Cat. No.96TH8242), Washington, DC, USA, 8–11 December 1996; pp. 337–341. [Google Scholar] [CrossRef]
- Qiang, L.; Kaplan, L.M. Target Localization Using Proximity Binary Sensors. In Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010; IEEE: Big Sky, MT, USA, 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Kolakowski, M. Improving BLE Based Localization Accuracy Using Proximity Sensors. In Proceedings of the 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; pp. 1–4. [Google Scholar] [CrossRef]
- STMicroelectronics. VL53L1X Datasheet; Decawave Ltd.: Dublin, Ireland, 2018. [Google Scholar]
- IONIS | European Commission Programme. Available online: https://ionis.eclexys.com/ (accessed on 30 September 2019).
- Grewal, M.S. Kalman Filtering: Theory and Practice Using MATLAB, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Bar-Shalom, Y. Estimation with Applications to Tracking and Navigation; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- VL53L1X—Long Distance Ranging Time-of-Flight Sensor Based on ST FlightSense Technology—STMicroelectronics. Available online: https://www.st.com/en/imaging-and-photonics-solutions/vl53l1x.html (accessed on 30 September 2019).
- P-NUCLEO-53L1A1. Available online: https://www.st.com/en/ecosystems/p-nucleo-53l1a1.html (accessed on 30 September 2019).
- STM32F401RE—STM32 Dynamic Efficiency MCU, ARM Cortex-M4 Core with DSP and FPU, up to 512 Kbytes Flash, 84 MHz CPU, Art Accelerator—STMicroelectronics. Available online: https://www.st.com/en/microcontrollers-microprocessors/stm32f401re.html (accessed on 30 September 2019).
- X-NUCLEO-53L1A1—Long-Distance Ranging Sensor Expansion Board Based on VL53L1X for STM32 Nucleo—STMicroelectronics. Available online: https://www.st.com/en/ecosystems/x-nucleo-53l1a1.html (accessed on 30 September 2019).
- X-CUBE-53L1A1—Long Distance Ranging Sensor Software Expansion for STM32Cube—STMicroelectronics. Available online: https://www.st.com/en/ecosystems/x-cube-53l1a1.html (accessed on 30 September 2019).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| maximum range | 400 cm |
| ranging resolution | 1 mm |
| field of view | 15–27 |
| maximum measurement rate | 50 Hz |
| package size | 4.9 × 2.5 × 1.56 mm |
| Model | ||||
|---|---|---|---|---|
| bias | −0.0303 | 0.0385 | −0.0293 | 0.0151 |
| standard deviation | 0.0151 | −0.0229 | 0.0068 | 0.0031 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolakowski, M. Improving Accuracy and Reliability of Bluetooth Low-Energy-Based Localization Systems Using Proximity Sensors. Appl. Sci. 2019, 9, 4081. https://doi.org/10.3390/app9194081
Kolakowski M. Improving Accuracy and Reliability of Bluetooth Low-Energy-Based Localization Systems Using Proximity Sensors. Applied Sciences. 2019; 9(19):4081. https://doi.org/10.3390/app9194081
Chicago/Turabian StyleKolakowski, Marcin. 2019. "Improving Accuracy and Reliability of Bluetooth Low-Energy-Based Localization Systems Using Proximity Sensors" Applied Sciences 9, no. 19: 4081. https://doi.org/10.3390/app9194081
APA StyleKolakowski, M. (2019). Improving Accuracy and Reliability of Bluetooth Low-Energy-Based Localization Systems Using Proximity Sensors. Applied Sciences, 9(19), 4081. https://doi.org/10.3390/app9194081