Intelligent Path Recognition against Image Noises for Vision Guidance of Automated Guided Vehicles in a Complex Workspace




Abstract
:Featured Application
Abstract
1. Introduction
2. Problem Formulation
2.1. Vision Guidance System
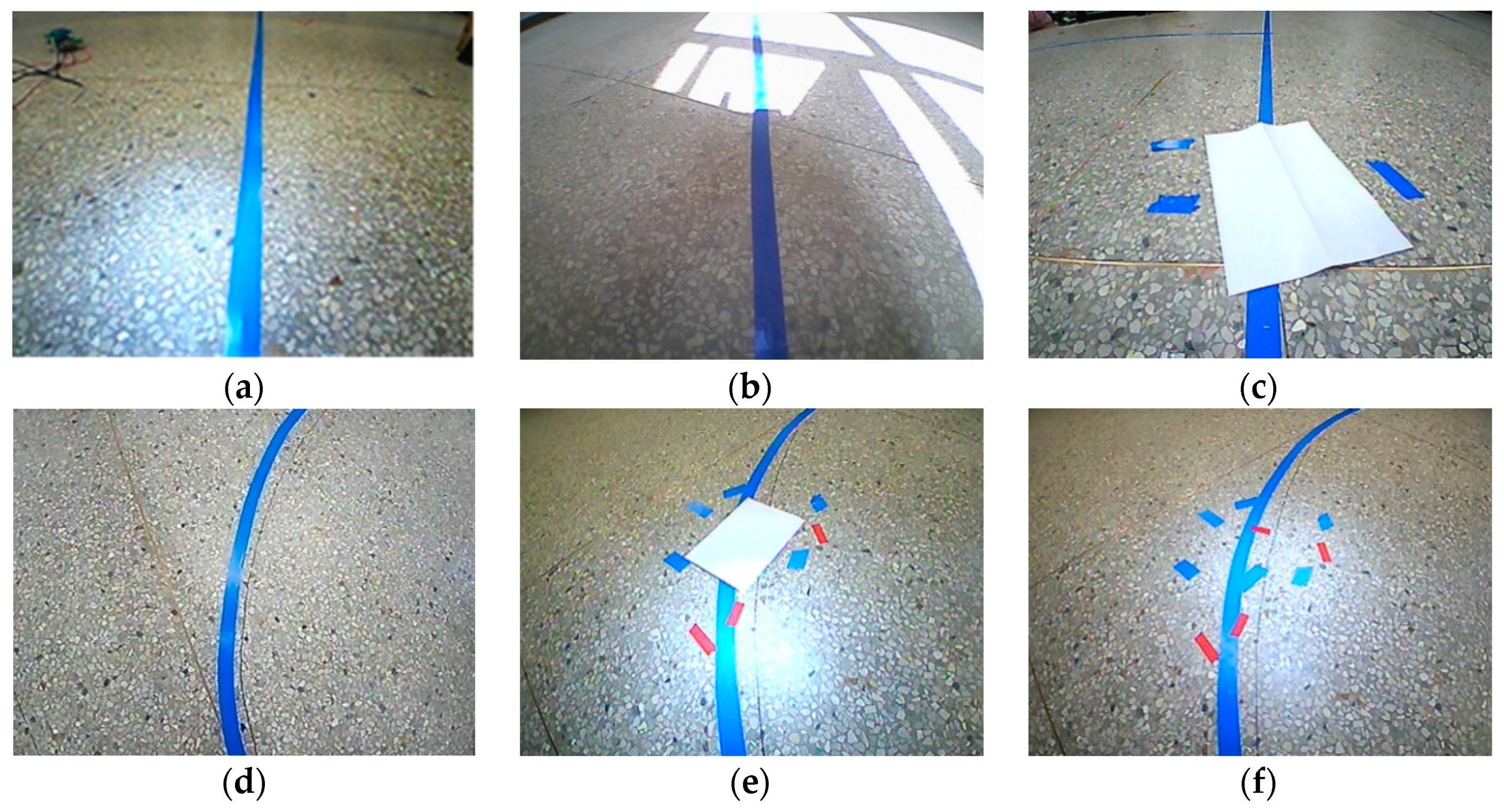
2.2. Path Recognition Problem
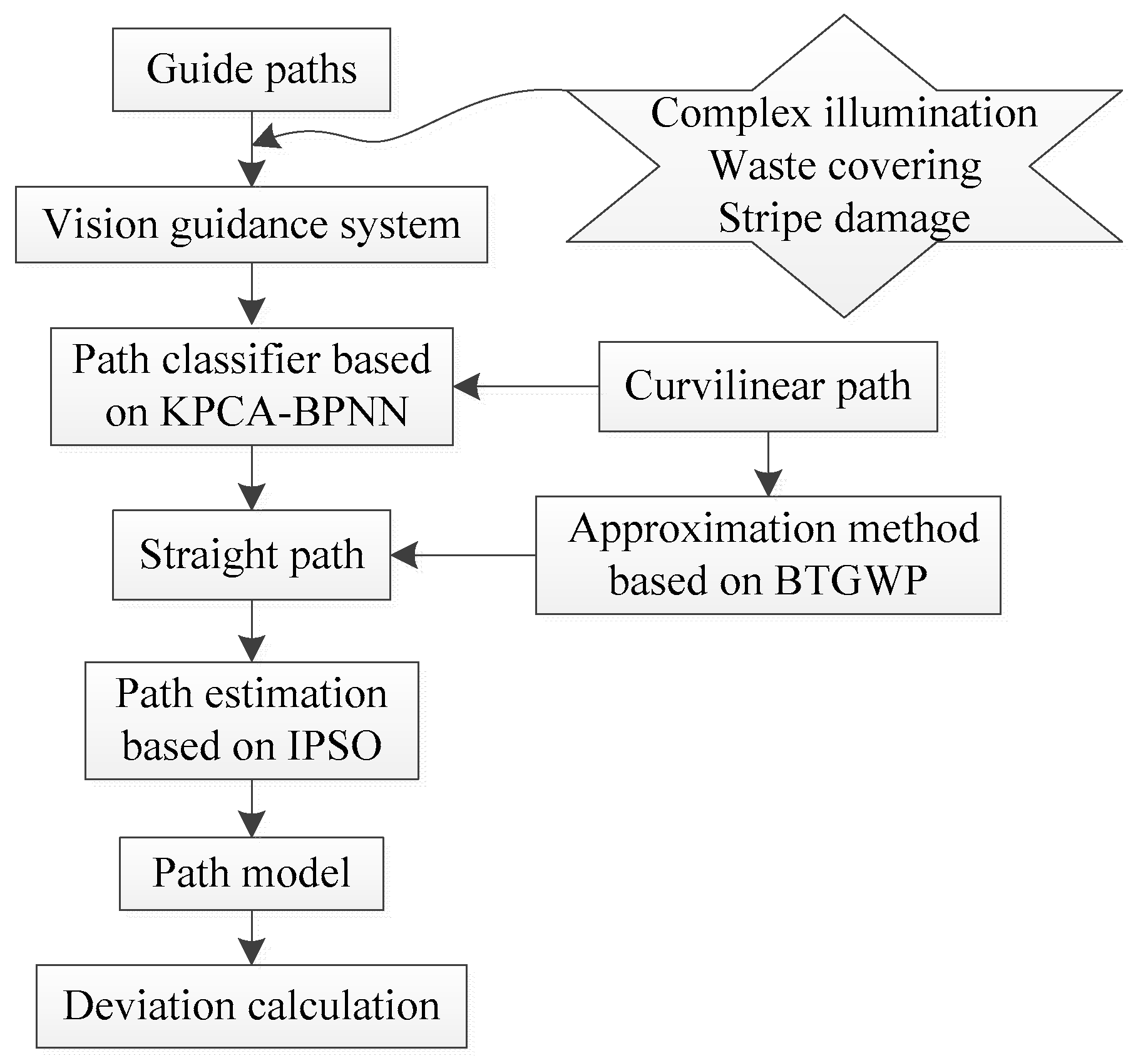
2.3. Methodology Overview
3. Path Feature Recognition
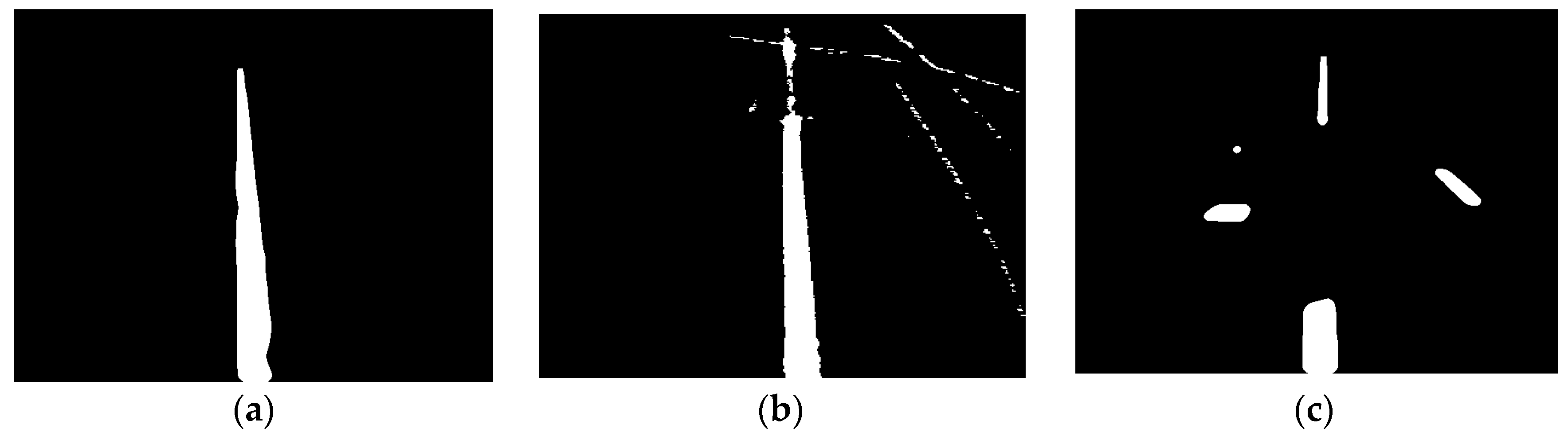
3.1. Threshold Segmentation
3.2. Feature Extraction
3.3. Path Classification
4. Path Model Estimation
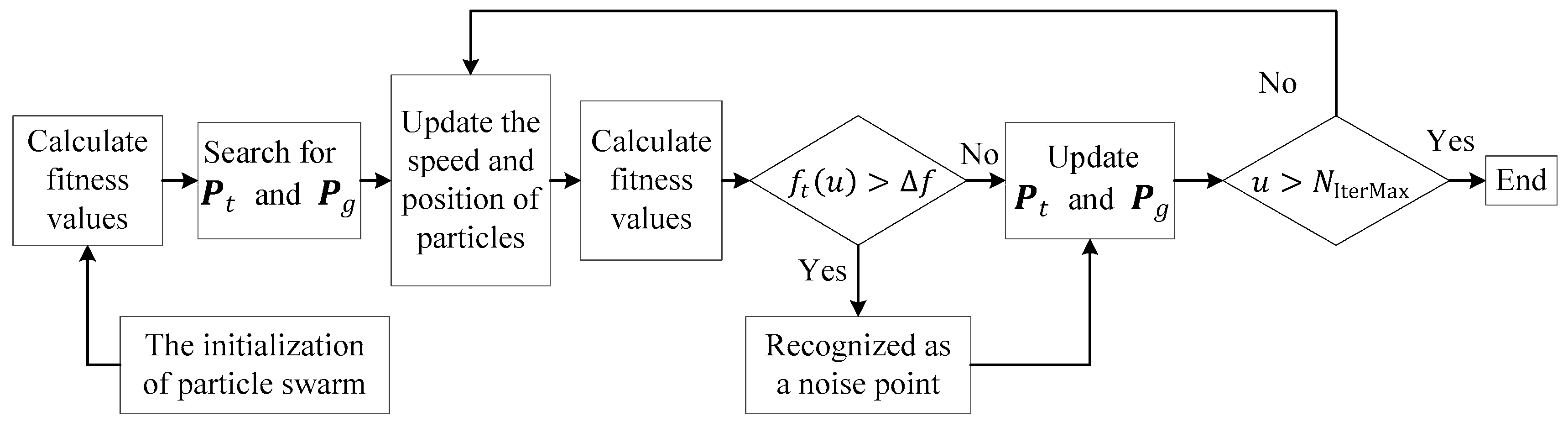
4.1. Improved Particle Swarm Optimization
4.2. Measurement Model
4.3. IPSO-Based Path Estimation
5. Curvilinear Path Approximation
6. Experiments
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kelly, A.; Nagy, B.; Stager, D.; Unnikrishnan, R. An infrastructure-free automated guided vehicle based on computer vision. IEEE Robot. Autom. Mag. 2007, 14, 24–34. [Google Scholar] [CrossRef]
- Li, Q.; Pogromsky, A.; Adriaansen, T.; Udding, J.T. A control of collision and deadlock avoidance for automated guided vehicles with a fault-tolerance capability. Int. J. Adv. Robot. Syst. 2016, 13, 1–24. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, Y.; Zou, T.; Zhao, L.; Lou, P.; Yin, Z. Coordinated path tracking of two vision-guided tractors for heavy-duty robotic vehicles. Robot. Comput.Integr.Manuf. 2018, 53, 93–107. [Google Scholar] [CrossRef]
- Baumgartner, E.T.; Skaar, S.B. An autonomous vision-based mobile robot. IEEE Trans. Autom. Control 1994, 39, 493–502. [Google Scholar] [CrossRef]
- Beccari, G.; Caselli, S.; Zanichelli, F.; Calafiore, A. Vision-based line tracking and navigation in structured environments. In Proceedings of the 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation CIRA’97. ‘Towards New Computational Principles for Robotics and Automation’, Monterey, CA, USA, 10–11 July 1997; pp. 406–411. [Google Scholar]
- Garibotto, G.; Mascisngelo, S.; Bassino, P.; Coelho, C.; Pavan, A.; Marson, M. Industrial exploitation of computer vision in logistic automation: Autonomous control of an intelligent forklift truck. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), Leuven, Belgium, 20–20 May 1998; pp. 1459–1464. [Google Scholar]
- D’Andrea, R. A revolution in the warehouse: A retrospective on kiva systems and the grand challenges ahead. IEEE Trans.Autom.Sci. Eng. 2012, 9, 638–639. [Google Scholar] [CrossRef]
- Miljković, Z.; Vuković, N.; Mitić, M.; Babić, B. New hybrid vision-based control approach for automated guided vehicles. Int. J. Adv.Manuf.Technol. 2013, 66, 231–249. [Google Scholar] [CrossRef]
- Xing, W.; Peihuang, L.; Jun, Y.; Xiaoming, Q.; Dunbing, T. Intersection recognition and guide-path selection for a vision-based AGV in a bidirectional flow network. Int. J. Adv. Robot. Syst. 2014, 11, 1–17. [Google Scholar] [CrossRef]
- Vasiljević, G.; Miklić, D.; Draganjac, I.; Kovačić, Z.; Lista, P. High-accuracy vehicle localization for autonomous warehousing. Robot. Comput. Integr. Manuf. 2016, 42, 1–16. [Google Scholar] [CrossRef]
- Tian, J.D.; Sun, J.; Tang, Y.D. Short-baseline binocular vision system for a humanoid ping-pong robot. J. Intell. Robot. Syst. 2011, 64, 543–560. [Google Scholar] [CrossRef]
- Coombes, M.; Eaton, W.; Chen, W.H. Machine vision for UAS ground operations. J. Intell. Robot. Syst. 2017, 88, 527–546. [Google Scholar] [CrossRef]
- Irie, K.; Yoshida, T.; Tomono, M. Outdoor localization using stereo vision under various illumination conditions. Adv. Robot. 2012, 26, 327–348. [Google Scholar] [CrossRef]
- Cras, J.L.; Paxman, J.; Saracik, B. Vision based localization under dynamic illumination. In Proceedings of the 5th International Conference on Automation, Robotics and Applications, Wellington, New Zealand, 6–8 December 2011; pp. 453–458. [Google Scholar]
- Li, J.; Chen, J.P.; Xu, C.S.; Wang, M.L.; Wang, J.E. Path tracking of intelligent vehicle based on dynamic image threshold. Trans. Chin. Soc.Agric. Mach. 2013, 44, 39–44. [Google Scholar]
- Oh, C.; Kim, B.; Sohn, K. Automatic illumination invariant road detection with stereo vision. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 889–893. [Google Scholar]
- Li, X.; Fang, X.; Wang, C.; Zhang, W. Lane detection and tracking using a parallel-snake approach. J. Intell. Robot. Syst. 2015, 77, 597–609. [Google Scholar] [CrossRef]
- Choi, H.C.; Oh, S.Y. Illumination invariant lane color recognition by using road color reference & neural networks. In Proceedings of the 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; pp. 1–5. [Google Scholar]
- Wu, X.; Zhang, Y.; Li, L.; Lou, P.; He, Z. Path extraction method of vision-guided AGV under complex illumination conditions. Trans. Chin. Soc. Agric. Mach. 2017, 48, 15–24. [Google Scholar]
- Zheng, F.; Luo, S.; Song, K.; Yan, C.W.; Wang, M.C. Improved lane line detection algorithm based on Hough transform. Pattern Recogn. Image Anal. 2018, 28, 254–260. [Google Scholar] [CrossRef]
- Chen, G.H.; Zhou, W.; Wang, F.J.; Xiao, B.J.; Dai, S.F. Lane detection based on improved canny detector and least square fitting. Adv. Mater. Res. 2013, 765–767, 2383–2387. [Google Scholar] [CrossRef]
- Tan, H.; Zhou, Y.; Zhu, Y.; Yao, D.; Wang, J. Improved river flow and random sample consensus for curve lane detection. Adv. Mech. Eng. 2015, 7, 1–12. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, D.; Tan, M. A fast and robust method for line detection based on image pyramid and Hough transform. Trans. Inst. Meas. Control 2011, 33, 971–984. [Google Scholar] [CrossRef]
- Stateczny, A. Methods of comparative plotting of the ship’s position. WIT Trans. Built Environ. 2002, 62, 61–68. [Google Scholar]
- Stateczny, A. Artificial neural networks for comparative navigation. In Proceedings of the International Conference on Artificial Intelligence and Soft Computing, Zakopane, Poland, 7–11 June 2004; pp. 1187–1192. [Google Scholar]
- Oliveira, P. MMAE terrain reference navigation for underwater vehicles using PCA. Int. J. Control 2007, 80, 1008–1017. [Google Scholar] [CrossRef]
- Ahmad, R.J. Particle swarm optimisation for dynamic optimisation problems: A review. Neural Comput. Appl. 2014, 25, 1507–1516. [Google Scholar]
- Yin, P.Y. Genetic particle swarm optimization for polygonal approximation of digital curves. Pattern Recogn. Image Anal. 2006, 16, 223–233. [Google Scholar] [CrossRef]
- Gálvez, A.; Iglesias, A. Efficient particle swarm optimization approach for data fitting with freeknot B-splines. Comput. Aided. Design. 2011, 43, 1683–1692. [Google Scholar] [CrossRef]
- Tenenbaum, J.B.; Silva, V.D.; Langford, J.C. A global geometric framework for nonlinear dimensionality reduction. Science 2000, 290, 2319–2323. [Google Scholar] [CrossRef] [PubMed]
- Palle, J. Unbounded Hermitian operators and relative reproducing kernel Hilbert space. Open Math. 2010, 8, 569–596. [Google Scholar]
- Scholkopf, B.; Mika, S.; Burges, C.; Knirsch, P.; Müller, K.R.; Rätsch, G.; Smola, A.J. Input space versus feature space in kernel-based methods. IEEE Trans. Neural Netw. 1999, 10, 1000–1017. [Google Scholar] [CrossRef]
- Luo, X.; Hu, W.; Xiong, L.; Li, F. Multilevel Jacobi and Gauss-Seidel type iteration methods for solving ill-posed integral equations. J. Inverse III-Posed Probl. 2015, 23, 477–490. [Google Scholar] [CrossRef]
- Hameed, A.A.; Karlik, B.; Salman, M.S. Back-propagation algorithm with variable adaptive momentum. Knowl.-Based Syst. 2016, 114, 79–87. [Google Scholar] [CrossRef]
- Jin, G.; Zhang, W.; Yang, Z.; Zhiyong, H.; Yuanjia, S.; Dongdong, W.; Gan, T. Image segmentation of thermal waving inspection based on particle swarm optimization fuzzy clustering algorithm. Meas. Sci. Rev. 2012, 12, 296–301. [Google Scholar]
- Antonakis, A.; Nikolaidis, T.; Pilidis, P. Multi-objective climb path optimization for aircraft/engine integration using particle swarm optimization. Appl. Sci. 2017, 7, 469. [Google Scholar] [CrossRef]
- Napis, N.; Khatib, T.; Hassan, E.; Sulaima, M. An improved method for reconfiguring and optimizing electrical active distribution network using evolutionary particle swarm optimization. Appl. Sci. 2018, 8, 804. [Google Scholar] [CrossRef]
- Chen, Y.K.; Huang, S.; Davis, L.; Du, H.; Shi, Q.; He, J.; Wang, Q.; Hu, W. Optimization of geometric parameters of longitudinal-connected air suspension based on a double-loop multi-objective particle swarm optimization algorithm. Appl. Sci. 2018, 8, 1454. [Google Scholar] [CrossRef]
- Rita, M.; Fairbairn, E.; Ribeiro, F.; Andrade, H.; Barbosa, H. Optimization of mass concrete construction using a twofold parallel genetic algorithm. Appl. Sci. 2018, 8, 399. [Google Scholar] [CrossRef]
- Xin, B.; Chen, J.; Peng, Z.; Pan, F. An adaptive hybrid optimizer based on particle swarm and differential evolution for global optimization. Sci. China Inform. Sci. 2010, 53, 980–989. [Google Scholar] [CrossRef]
- Rezaee, J.A. Enhanced leader PSO (ELPSO): A new PSO variant for solving global optimization problems. Appl. Soft Comput. 2015, 26, 401–417. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Wu, J.C.; Zhou, H.C.; Tang, X.Q. Implementation of CL points preprocessing methodology with NURBS curve fitting technique for high-speed matching. Comput. Industr. Eng. 2015, 81, 58–64. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, J.; Xu, Q.; Li, B.; Hu, H.M. An improved RANSAC based on the scale variation homogeneity. J. Vis. Commun. Image Represent. 2016, 40, 751–764. [Google Scholar] [CrossRef] [Green Version]
- Parry, R.M.; Wang, M.D. A fast least-squares algorithm for population inference. BMC Bioinform. 2013, 14, 1–17. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Number of Background Pixels (Black) | Number of Path Pixels (White) | Number of Center Pixels (Blue) |
|---|---|---|---|
| Figure 7a | 294852 | 12268 | 80 |
| Figure 7b | 292697 | 14503 | 83 |
| Figure 7c | 299500 | 14420 | 50 |
| Figure 7d | 298011 | 9094 | 95 |
| Figure 7e | 295200 | 11896 | 104 |
| Figure 7f | 298149 | 8972 | 79 |
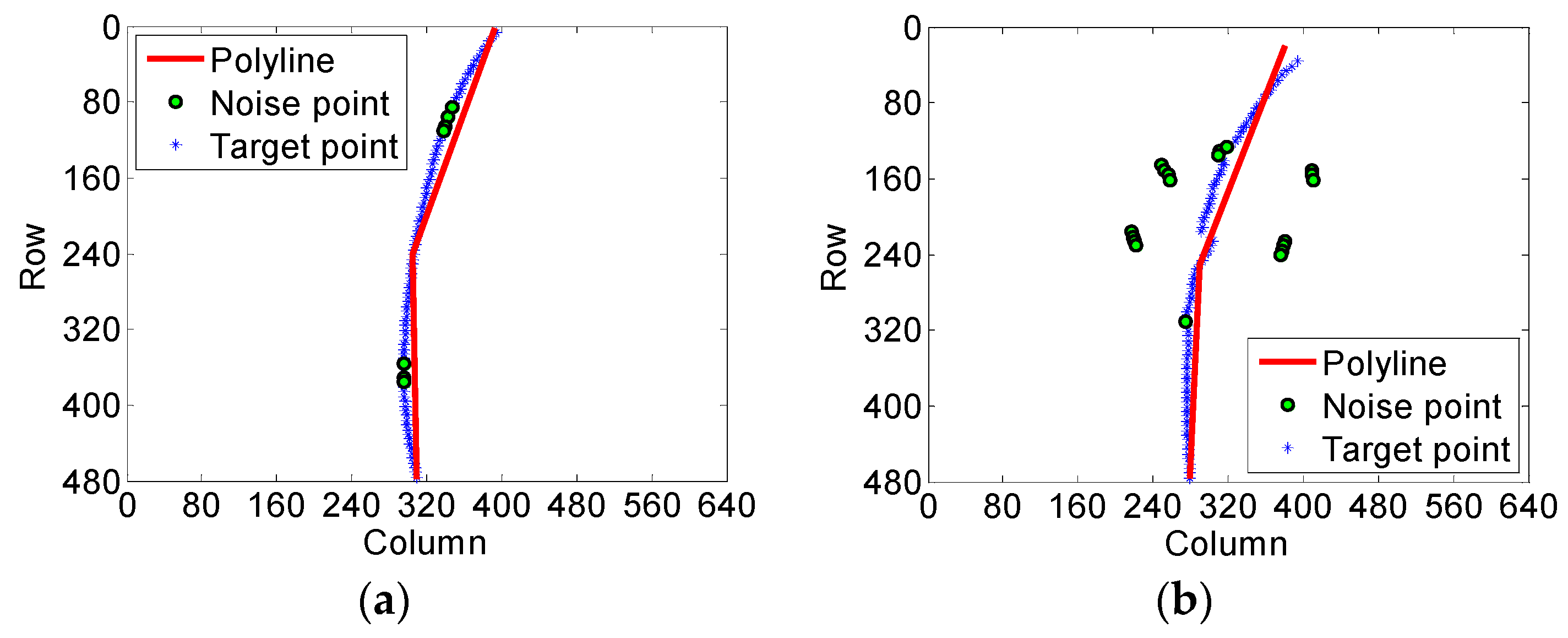
| Image | Number of Noise Points | Number of Target Points | Accuracy Rate% |
|---|---|---|---|
| Figure 10a | 7 | 76 | 100 |
| Figure 10b | 14 | 36 | 100 |
| Image | Guidance Window | Number of Noise Points | Number of Target Points | Accuracy Rate % | |
|---|---|---|---|---|---|
| Figure 13a | 1 | 3 | 44 | 1.42 | 100 |
| 2 | 3 | 45 | 1.23 | ||
| Figure 13b | 1 | 18 | 37 | 1.56 | 100 |
| 2 | 1 | 48 | 1.19 |
| Detection Method | Number of Sample Images | Recognition Rate % | Average Time Consumption (ms) |
|---|---|---|---|
| IRANSAC | 100 | 50% | 131.5 |
| LS | 100 | 20% | 66.3 |
| IPSO | 100 | 100% | 61 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Sun, C.; Zou, T.; Xiao, H.; Wang, L.; Zhai, J. Intelligent Path Recognition against Image Noises for Vision Guidance of Automated Guided Vehicles in a Complex Workspace. Appl. Sci. 2019, 9, 4108. https://doi.org/10.3390/app9194108
Wu X, Sun C, Zou T, Xiao H, Wang L, Zhai J. Intelligent Path Recognition against Image Noises for Vision Guidance of Automated Guided Vehicles in a Complex Workspace. Applied Sciences. 2019; 9(19):4108. https://doi.org/10.3390/app9194108
Chicago/Turabian StyleWu, Xing, Chao Sun, Ting Zou, Haining Xiao, Longjun Wang, and Jingjing Zhai. 2019. "Intelligent Path Recognition against Image Noises for Vision Guidance of Automated Guided Vehicles in a Complex Workspace" Applied Sciences 9, no. 19: 4108. https://doi.org/10.3390/app9194108
APA StyleWu, X., Sun, C., Zou, T., Xiao, H., Wang, L., & Zhai, J. (2019). Intelligent Path Recognition against Image Noises for Vision Guidance of Automated Guided Vehicles in a Complex Workspace. Applied Sciences, 9(19), 4108. https://doi.org/10.3390/app9194108