Sparse Representation and SVM Diagnosis Method for Inter-Turn Short-Circuit Fault in PMSM


Abstract
:1. Introduction
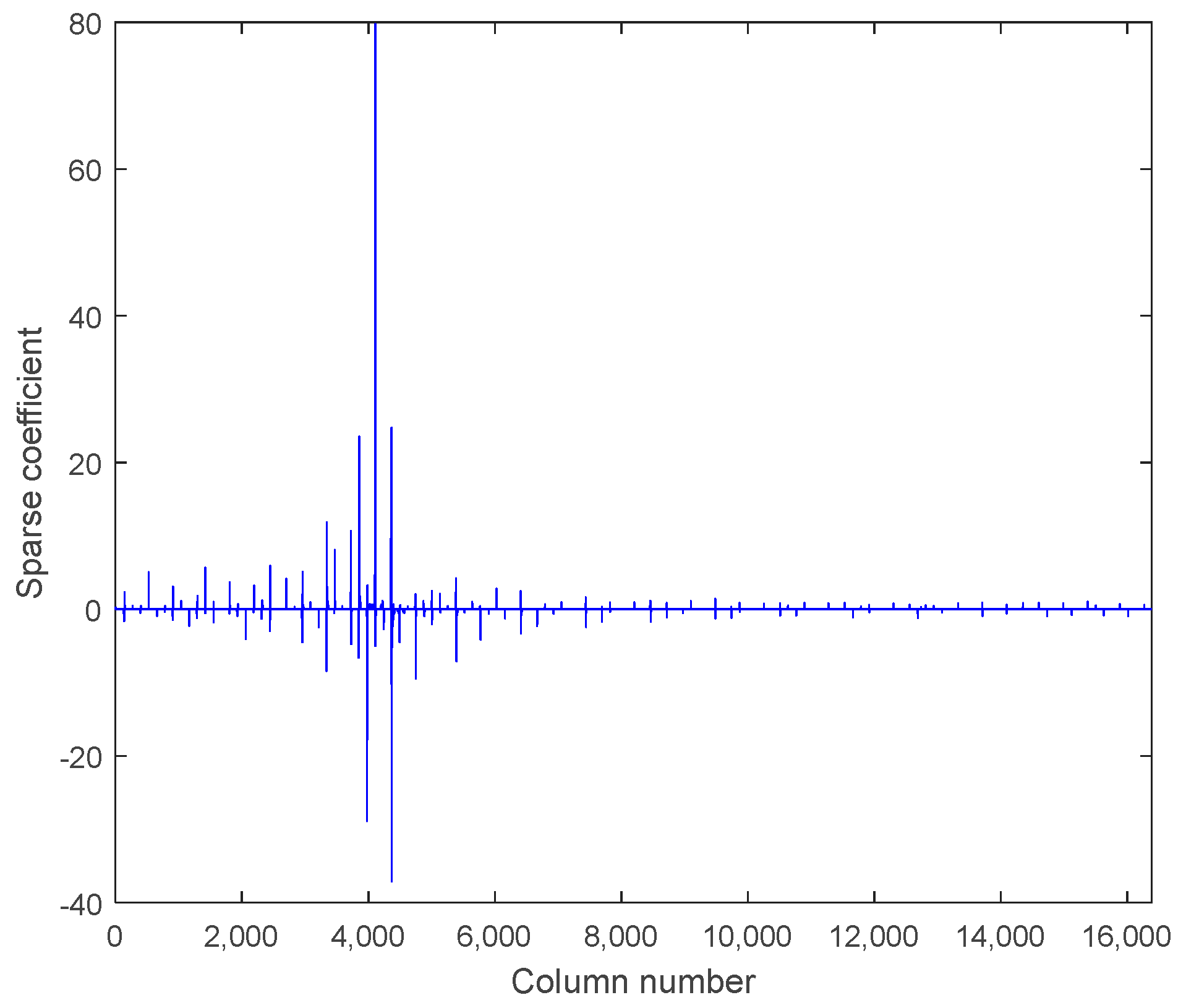
2. Sparse Representation
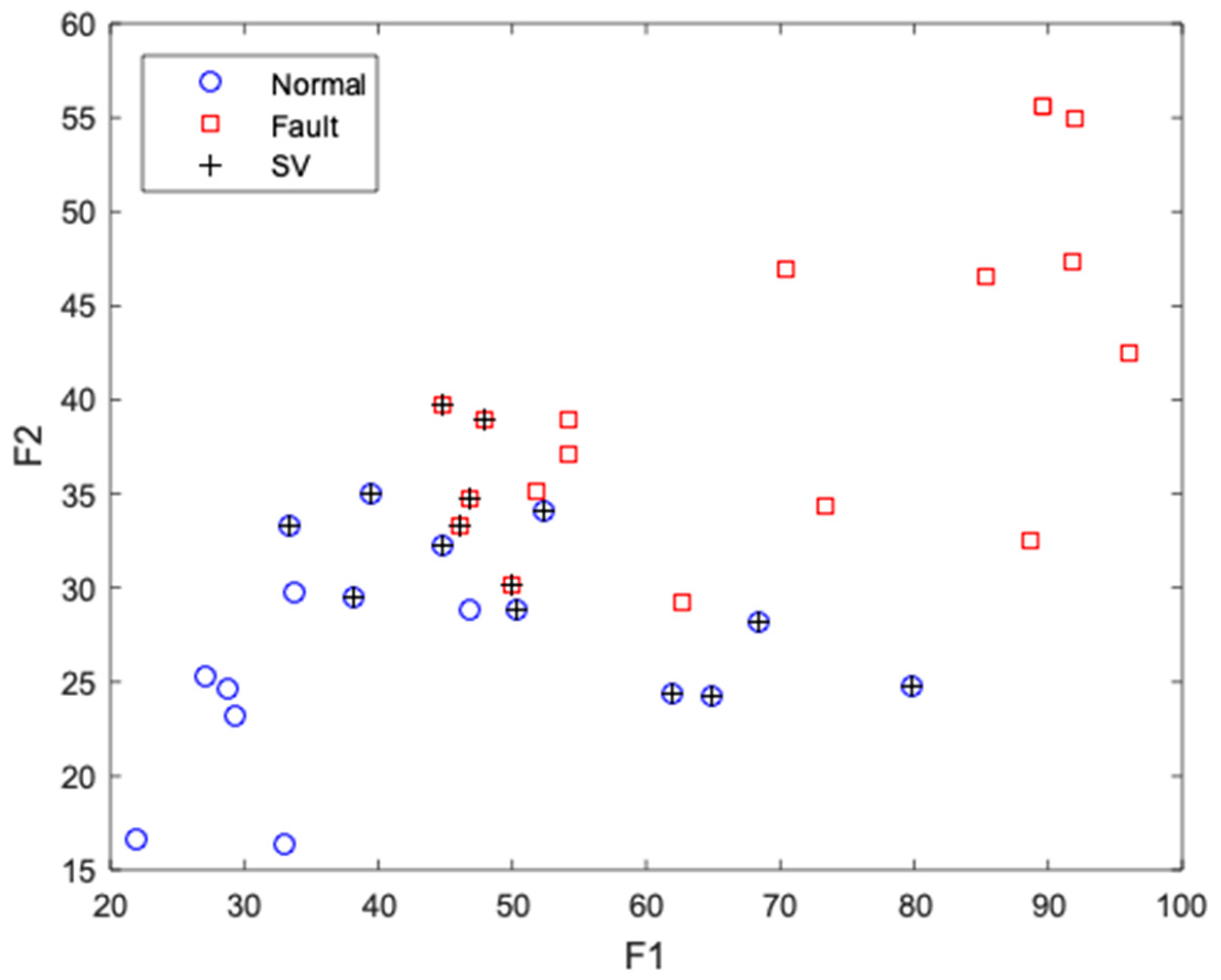
3. SVM
4. Experimental Results and Analysis
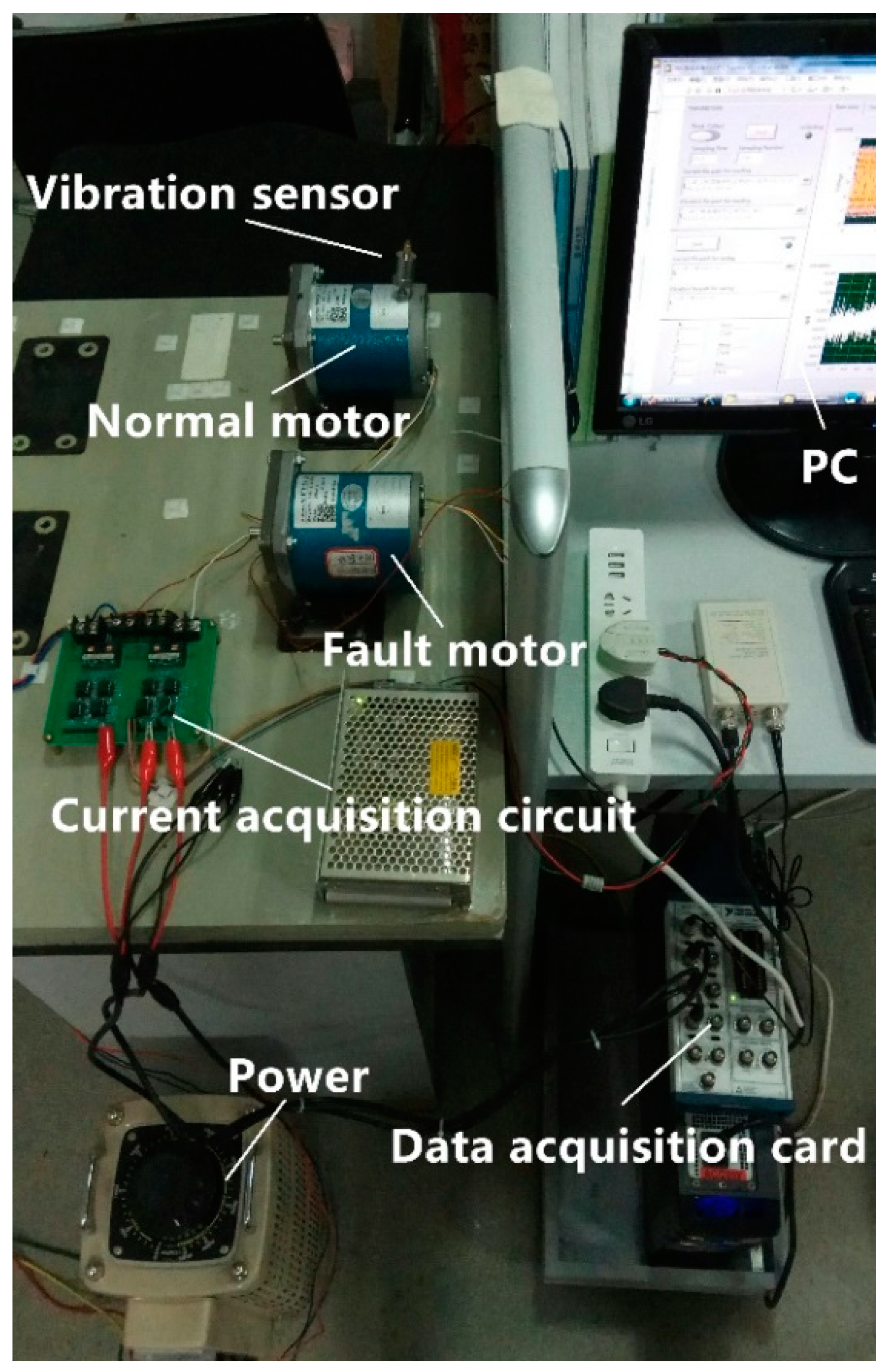
4.1. Experiment Setup
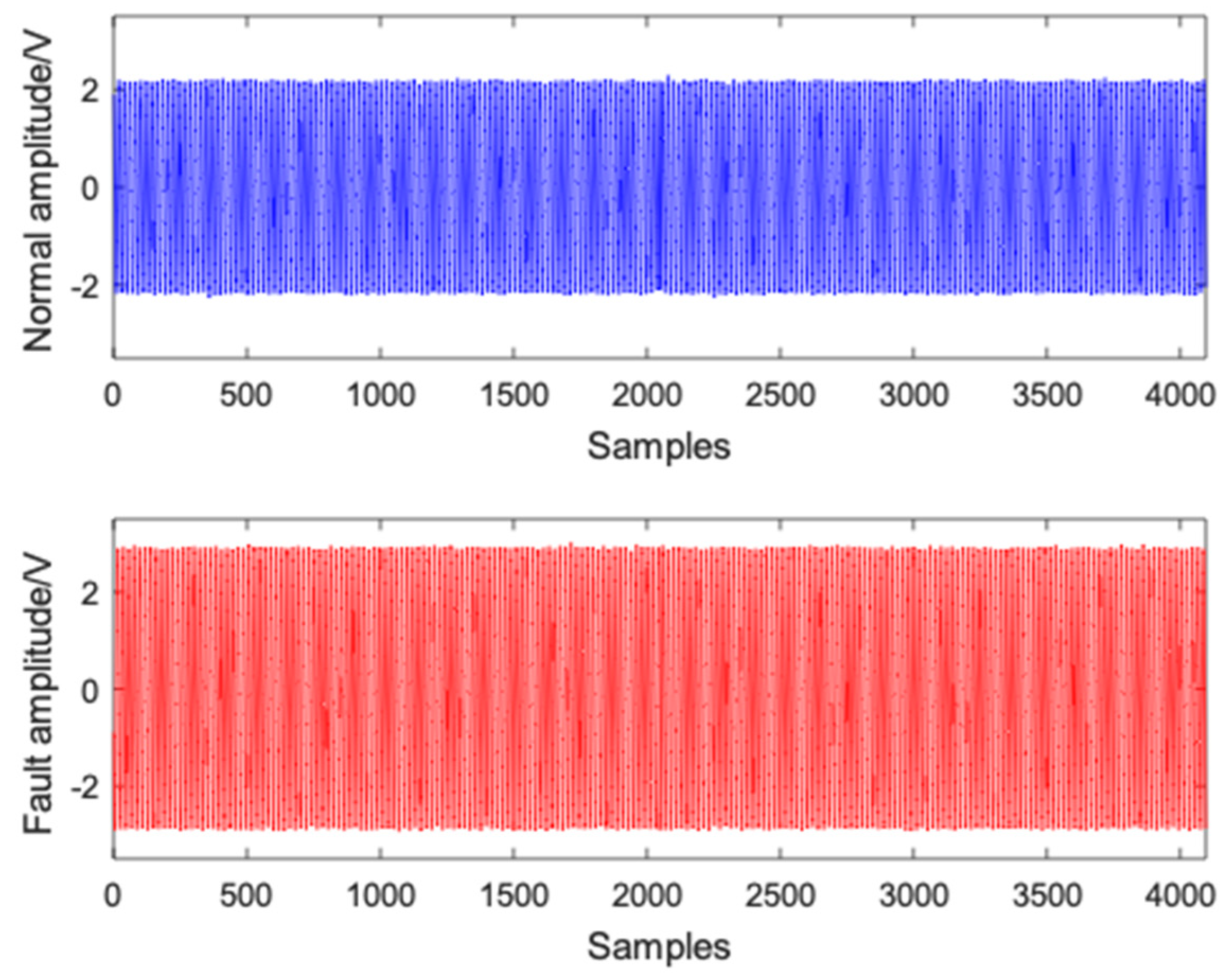
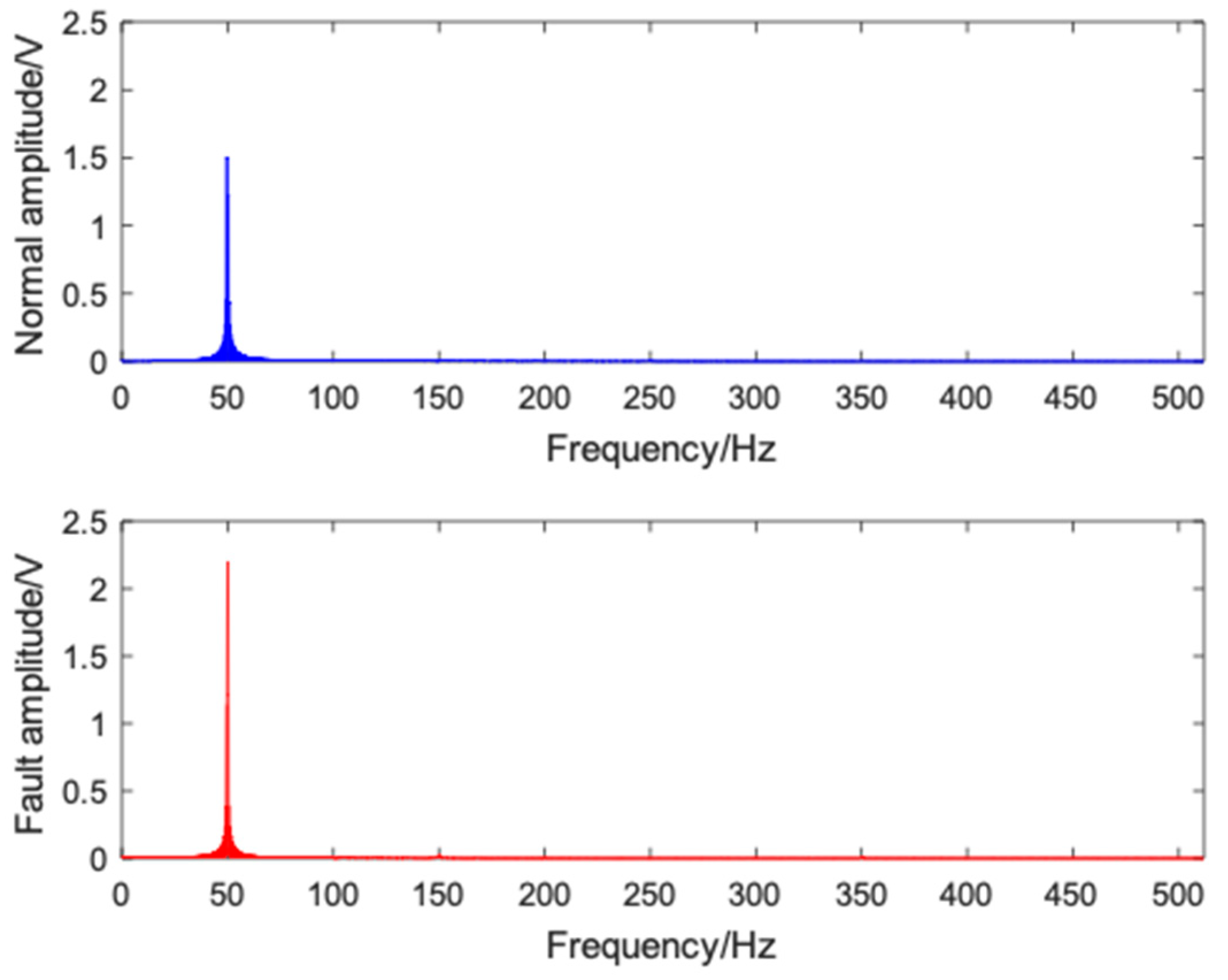
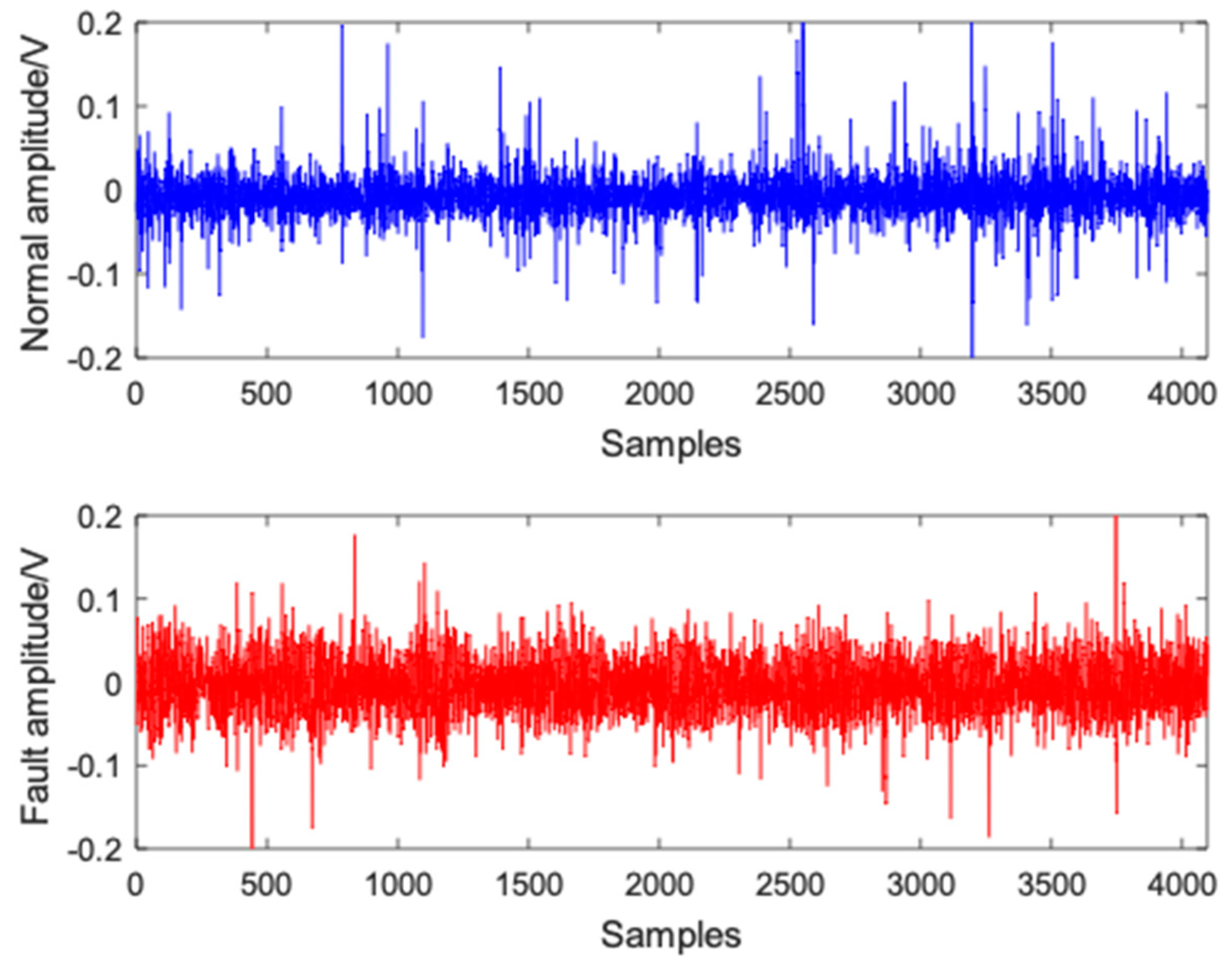
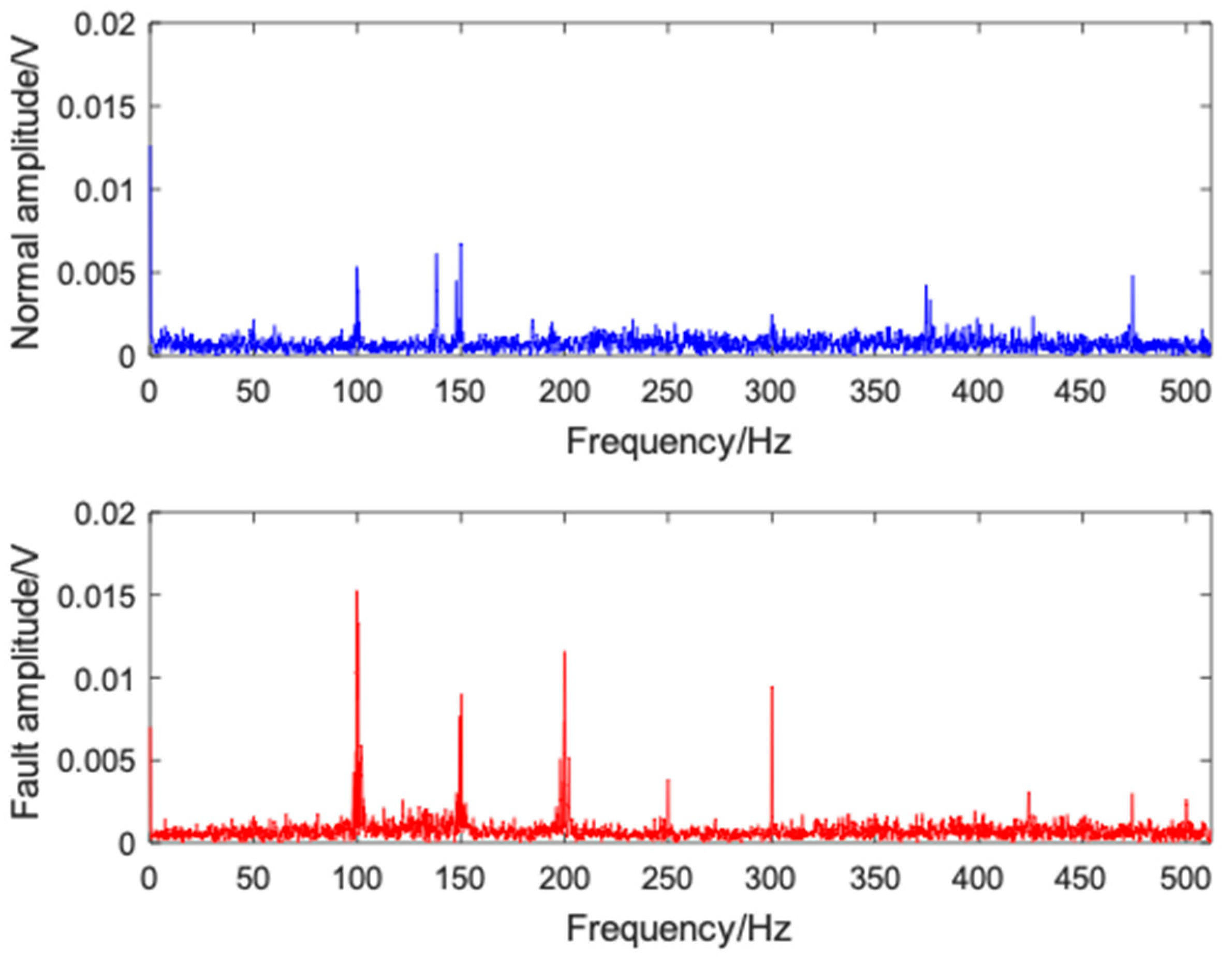
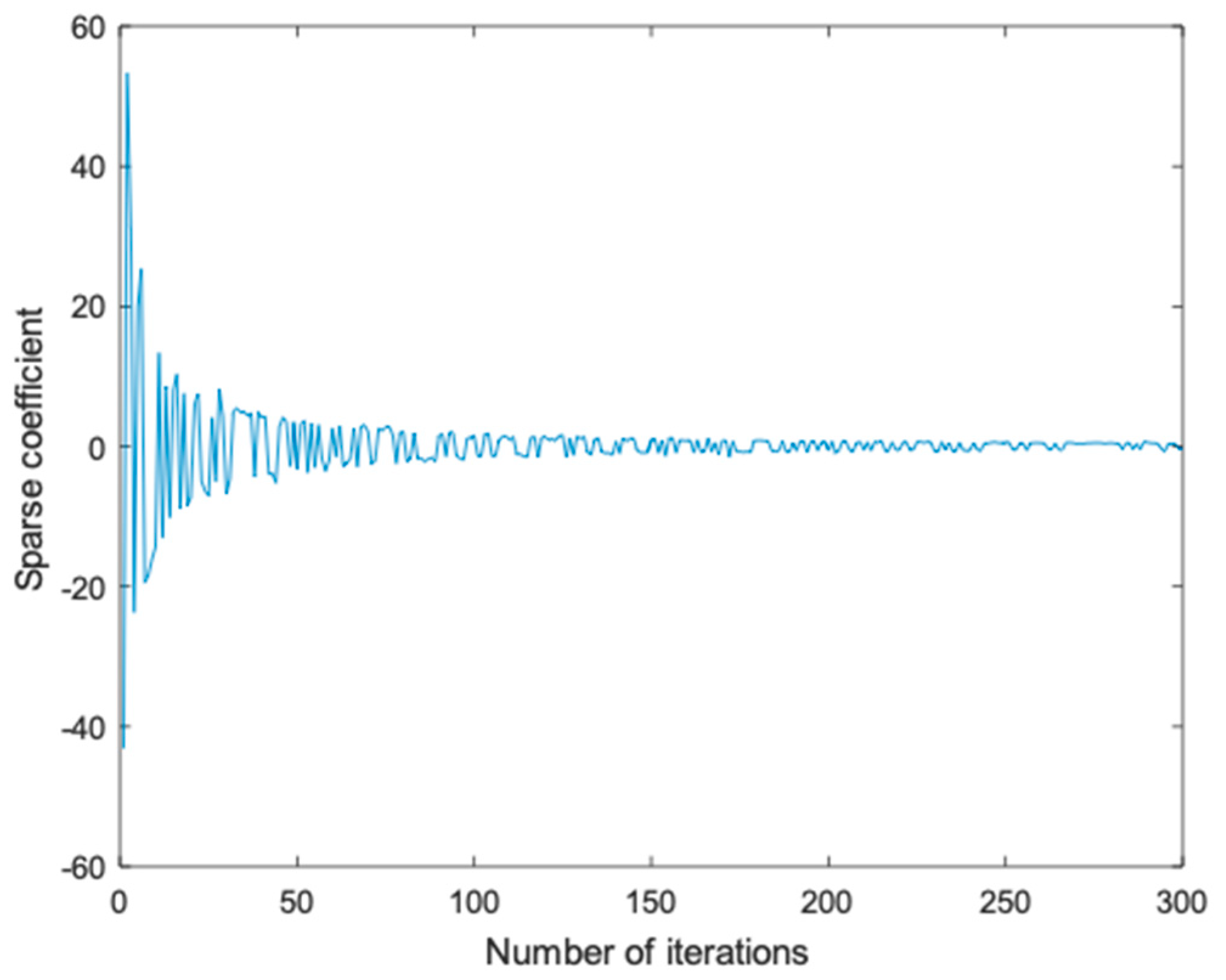
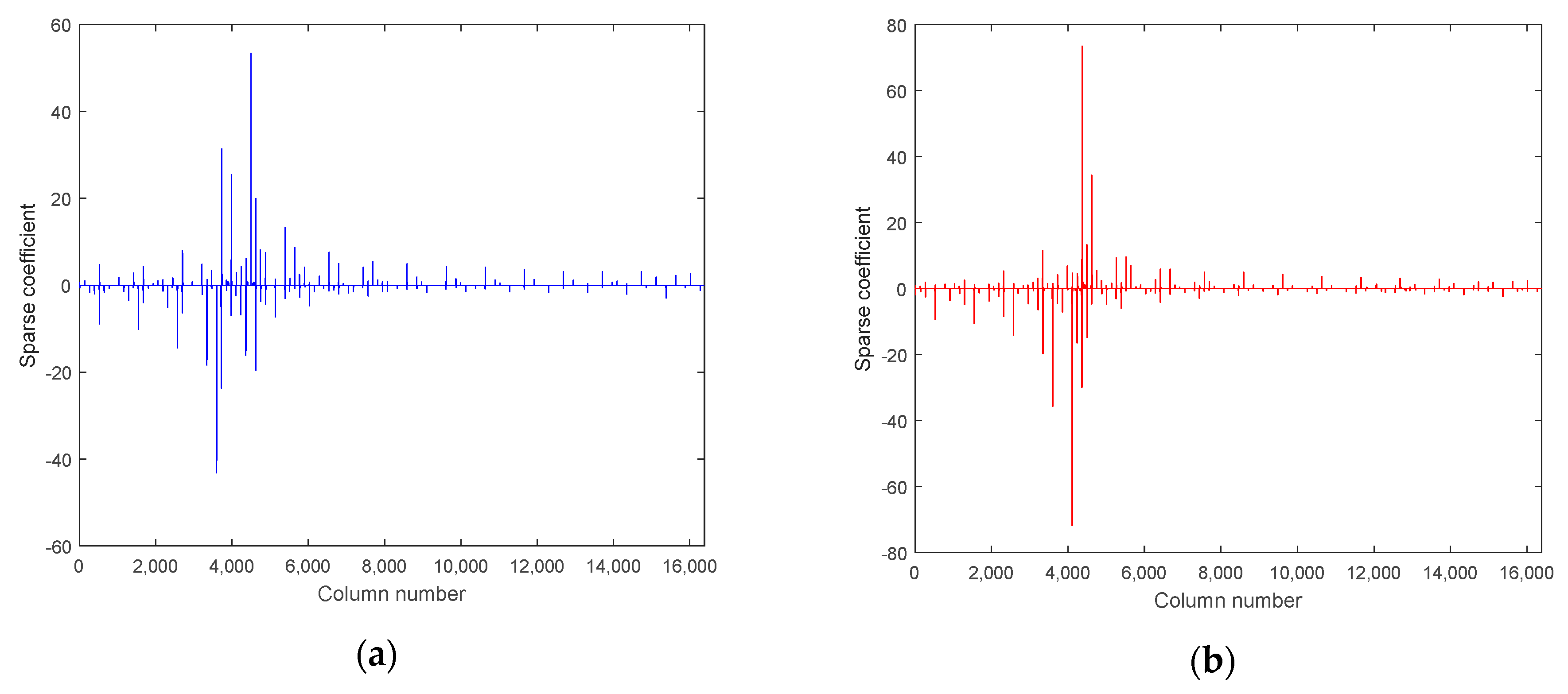
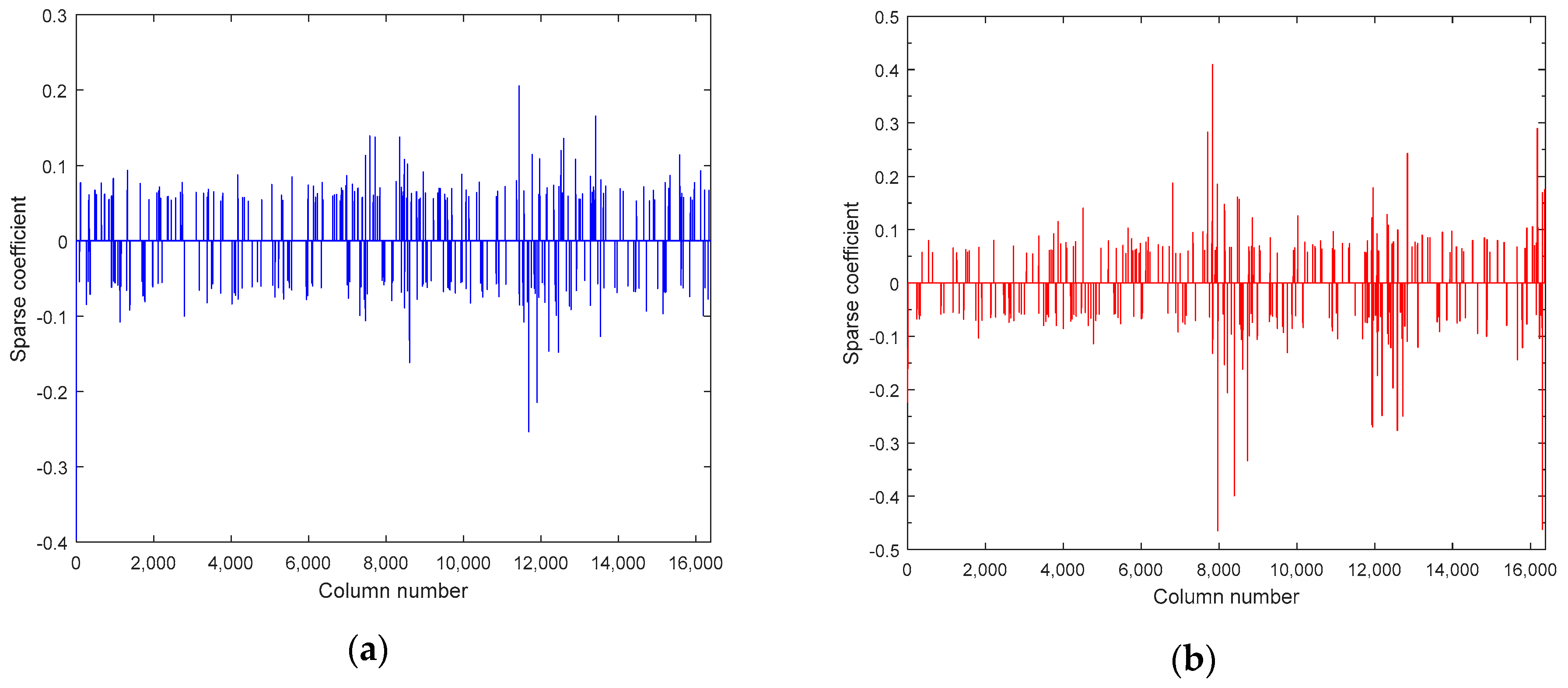
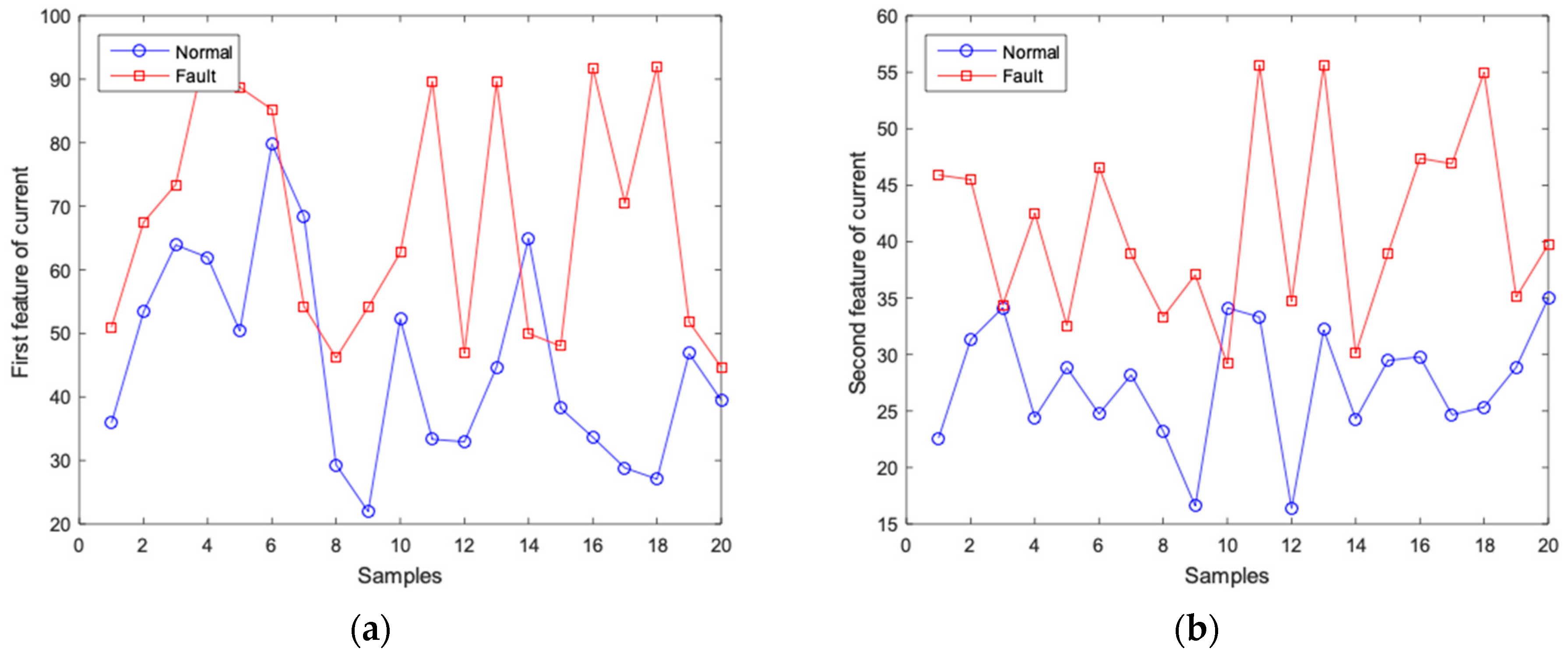
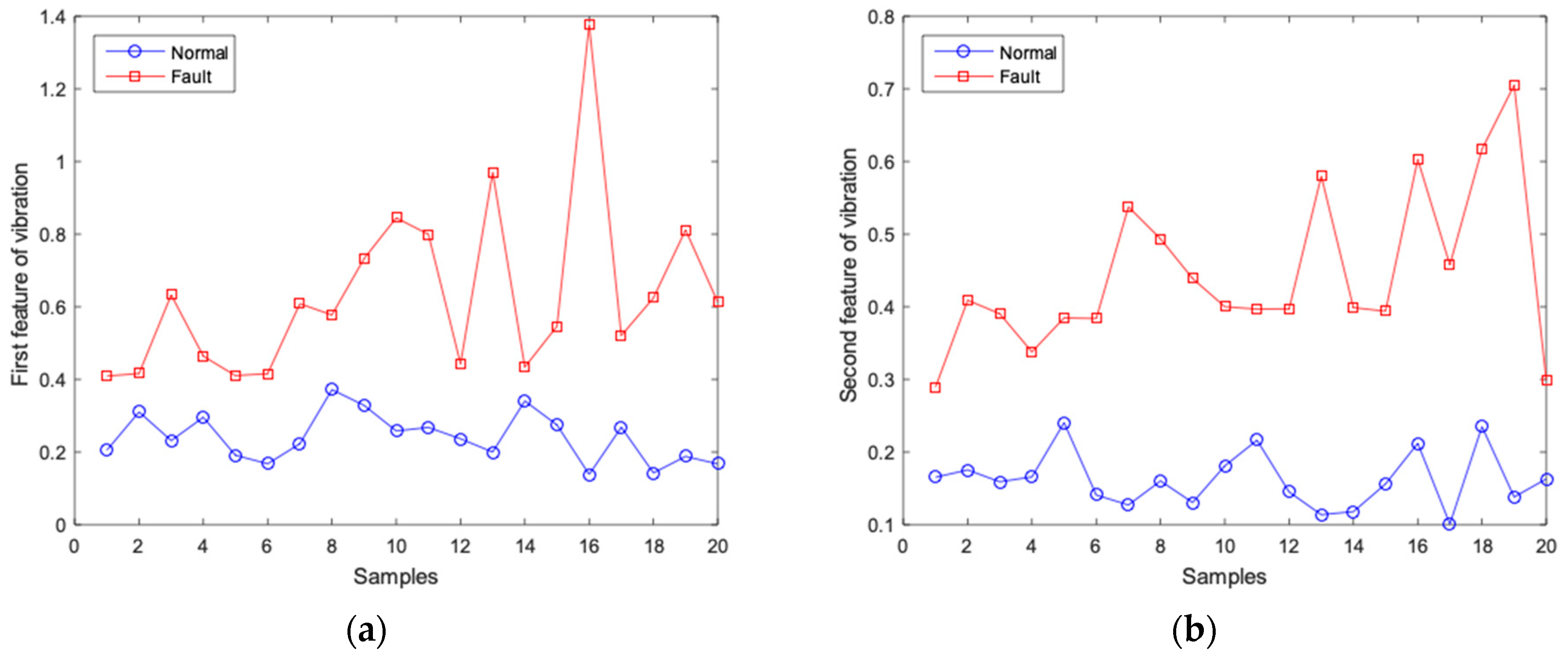
4.2. Feature Extraction Based on Sparse Representation
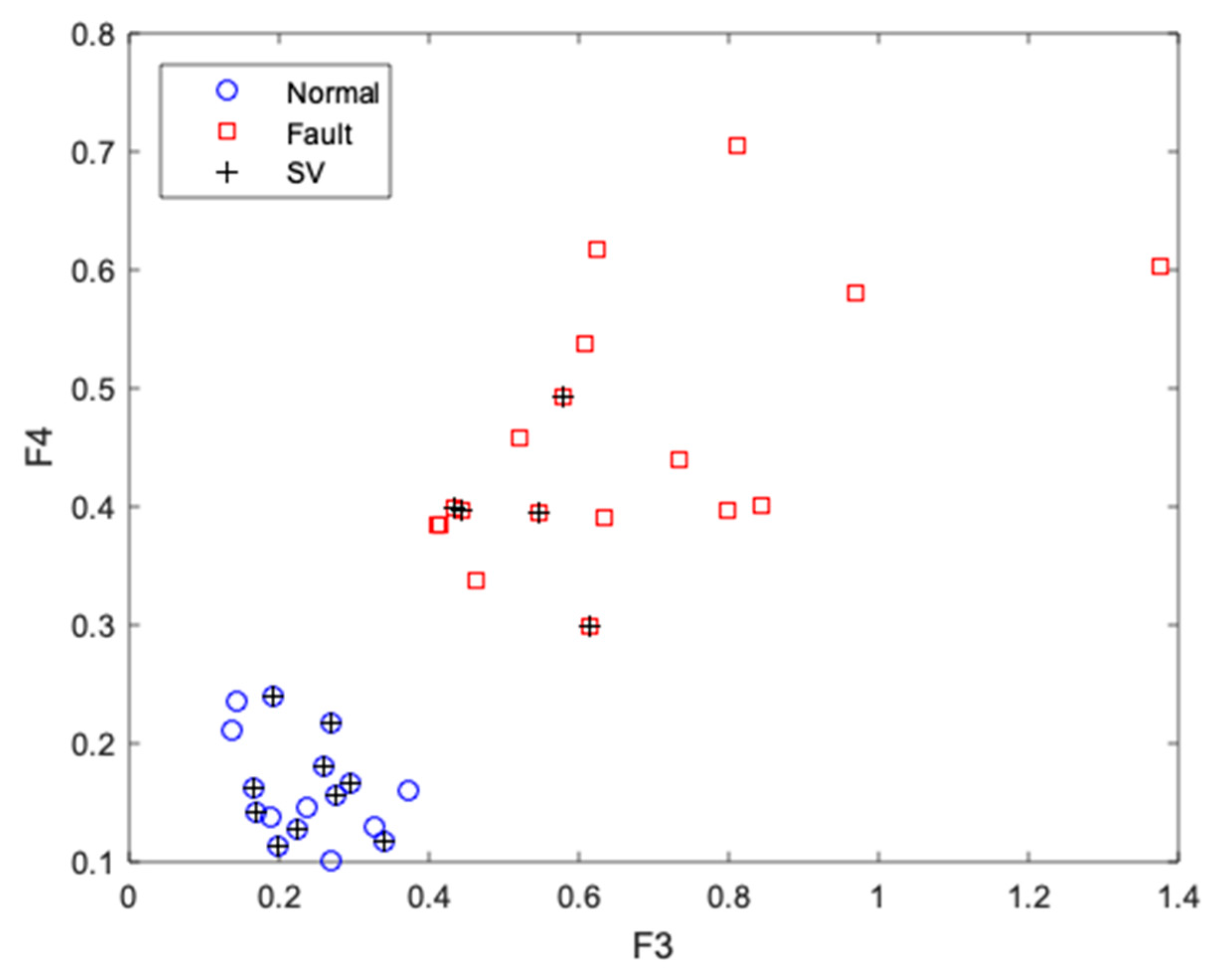
4.3. Training and Testing Results of SVM
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Z.F.; Yang, J.; Ye, H.; Zhou, W. A review of Permanent Magnet Synchronous Motor fault diagnosis. In Proceedings of the IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Mazzoletti, M.A.; Bossio, G.R.; Angelo, C.H.D.; Espinoza-Trejo, D.R. A Model-Based Strategy for Interturn Short-Circuit Fault Diagnosis in PMSM. IEEE Trans. Ind. Electron. 2017, 64, 7218–7228. [Google Scholar] [CrossRef]
- Elbouchikhi, E.; Choqueuse, V.; Auge, R.F.; Benbouzid, M.E.H. Motor Current Signal Analysis Based on a Matched Subspace Detector. IEEE Trans. Instrum. Meas. 2017, 66, 3260–3270. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Pen, H.; Wan, Z.; Chang, C.S. Feature Knowledge Based Fault Detection of Induction Motors through the Analysis of Stator Current Data. IEEE Trans. Instrum. Meas. 2016, 65, 549–558. [Google Scholar] [CrossRef]
- Strangas, E.G.; Aviyente, S.; Zaidi, S.S.H. Time–Frequency Analysis for Efficient Fault Diagnosis and Failure Prognosis for Interior Permanent-Magnet AC Motors. IEEE Trans. Ind. Electron. 2008, 55, 4191–4199. [Google Scholar] [CrossRef]
- Obeid, N.H.; Battiston, A.; Boileau, T.; Nahid-Mobarakeh, B. Early Intermittent Interturn Fault Detection and Localization for a Permanent Magnet Synchronous Motor of Electrical Vehicles Using Wavelet Transform. IEEE Trans. Transport. Electrif. 2017, 3, 694–702. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part II: Fault Diagnosis with Knowledge-Based and Hybrid/Active Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Das, S.; Koley, C.; Purkait, P.; Chakravorti, S. Wavelet aided SVM classifier for stator inter-turn fault monitoring in induction motors. In Proceedings of the IEEE PES General Meeting, Providence, RI, USA, 25–29 July 2010; pp. 1–6. [Google Scholar]
- Chen, F.; Tang, B.; Chen, R. A novel fault diagnosis model for gearbox based on wavelet support vector machine with immune genetic algorithm. Measurement 2013, 46, 220–232. [Google Scholar] [CrossRef]
- Hassani, H.; Zarei, J.; Arefi, M.M.; Razavi-Far, R. zSlices-Based General Type-2 Fuzzy Fusion of Support Vector Machines with Application to Bearing Fault Detection. IEEE Trans. Ind. Electron. 2017, 64, 7210–7217. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, Y.; Yang, J.; Li, X.; Zhang, D. A Survey of Sparse Representation: Algorithms and Applications. IEEE Access 2017, 3, 490–530. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, D.; Yang, J.; Yang, J.-Y. A two-phase test sample sparse representation method for use with face recognition. IEEE Trans. Circuits Syst. Video Technol. 2011, 21, 1255–1262. [Google Scholar]
- Chai, N.; Yang, M.; Ni, Q.; Xu, D. Gear Fault Diagnosis Based on Dual Parameter Optimized Resonance-Based Sparse Signal Decomposition of Motor Current. IEEE Trans. Ind. Appl. 2018, 54, 3782–3792. [Google Scholar] [CrossRef]
- Wright, J.; Yang, A.Y.; Ganesh, A.; Sastry, S.S.; Ma, Y. Robust Face Recognition via Sparse Representation. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 210–227. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, L.; Lv, W.; Jiang, S.; Xiao, Y. Fault Diagnosis Using a Joint Model Based on Sparse Representation and SVM. IEEE Trans. Instrum. Meas. 2016, 65, 2313–2320. [Google Scholar] [CrossRef]
- Hou, J.; Wang, Y.; Gao, T.; Yang, Y. Fault feature extraction of power electronic circuits based on sparse decomposition. In Proceedings of the 2016 International Conference on Condition Monitoring and Diagnosis (CMD), Xi’an, China, 25–28 September 2016; pp. 505–508. [Google Scholar]
- Yang, B.; Liu, R.; Chen, X. Fault Diagnosis for a Wind Turbine Generator Bearing via Sparse Representation and Shift-Invariant K-SVD. IEEE Trans. Ind. Inform. 2017, 13, 1321–1331. [Google Scholar] [CrossRef]
- Malla, T.S.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef] [Green Version]
- Liang, H.; Chen, Y.; Liang, S.; Wang, C. Fault Detection of Stator Inter-Turn Short-Circuit in PMSM on Stator Current and Vibration Signal. Appl. Sci. 2018, 8, 1677. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: signal x, dictionary matrix D, sparse degree K |
|---|
|
| Output: sparse representation coefficients α |
| Sample | F1 | F2 | F3 | F4 | Result |
|---|---|---|---|---|---|
| 1 | 35.9105 | 22.6089 | 0.2055 | 0.1654 | 1 |
| 2 | 50.9903 | 45.8897 | 0.4094 | 0.2895 | −1 |
| 3 | 53.3843 | 31.3187 | 0.3106 | 0.1755 | 1 |
| 4 | 67.5021 | 45.5020 | 0.4165 | 0.4091 | −1 |
| 5 | 52.2853 | 34.1310 | 0.2317 | 0.1591 | 1 |
| 6 | 73.4088 | 34.3846 | 0.6328 | 0.3905 | −1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, S.; Chen, Y.; Liang, H.; Li, X. Sparse Representation and SVM Diagnosis Method for Inter-Turn Short-Circuit Fault in PMSM. Appl. Sci. 2019, 9, 224. https://doi.org/10.3390/app9020224
Liang S, Chen Y, Liang H, Li X. Sparse Representation and SVM Diagnosis Method for Inter-Turn Short-Circuit Fault in PMSM. Applied Sciences. 2019; 9(2):224. https://doi.org/10.3390/app9020224
Chicago/Turabian StyleLiang, Siyuan, Yong Chen, Hong Liang, and Xu Li. 2019. "Sparse Representation and SVM Diagnosis Method for Inter-Turn Short-Circuit Fault in PMSM" Applied Sciences 9, no. 2: 224. https://doi.org/10.3390/app9020224
APA StyleLiang, S., Chen, Y., Liang, H., & Li, X. (2019). Sparse Representation and SVM Diagnosis Method for Inter-Turn Short-Circuit Fault in PMSM. Applied Sciences, 9(2), 224. https://doi.org/10.3390/app9020224