Statistical Edge Detection and Circular Hough Transform for Optic Disk Localization


Abstract
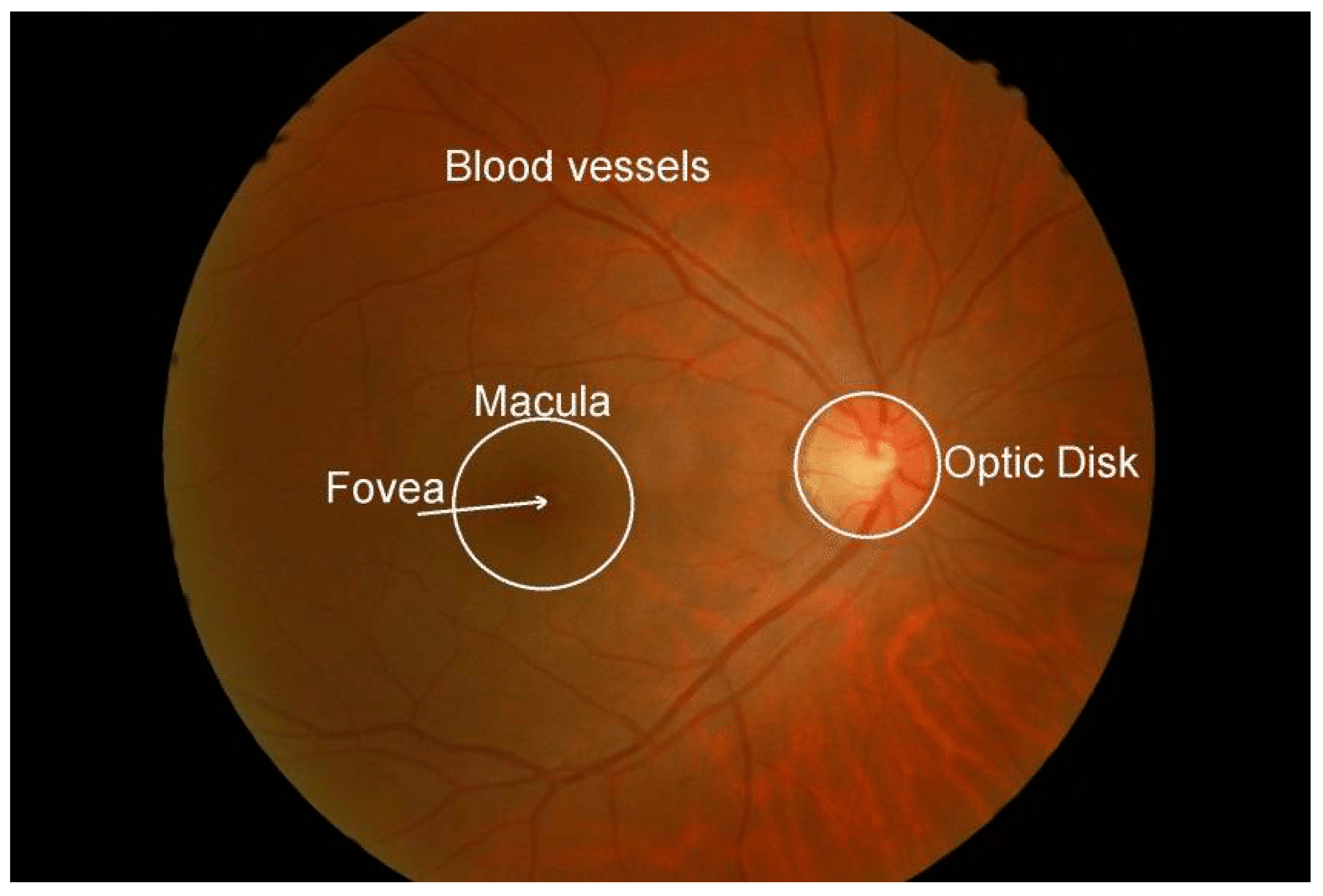
:1. Introduction
1.1. Optic Disk Detection Literature
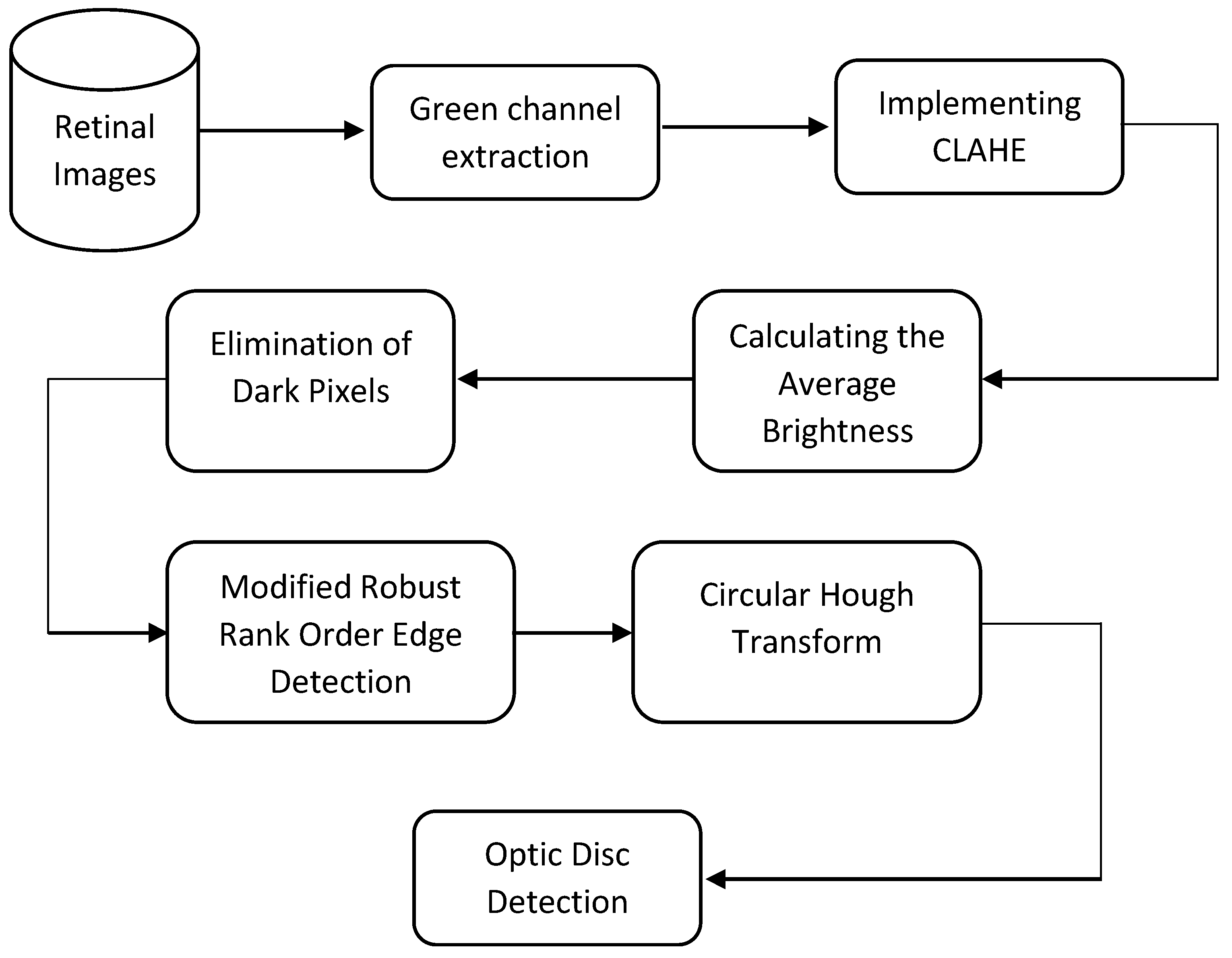
1.2. Proposed Method
2. Materials and Methods
2.1. Retinal Datasets
2.2. Preprocessing for Image Contrast Enhancement
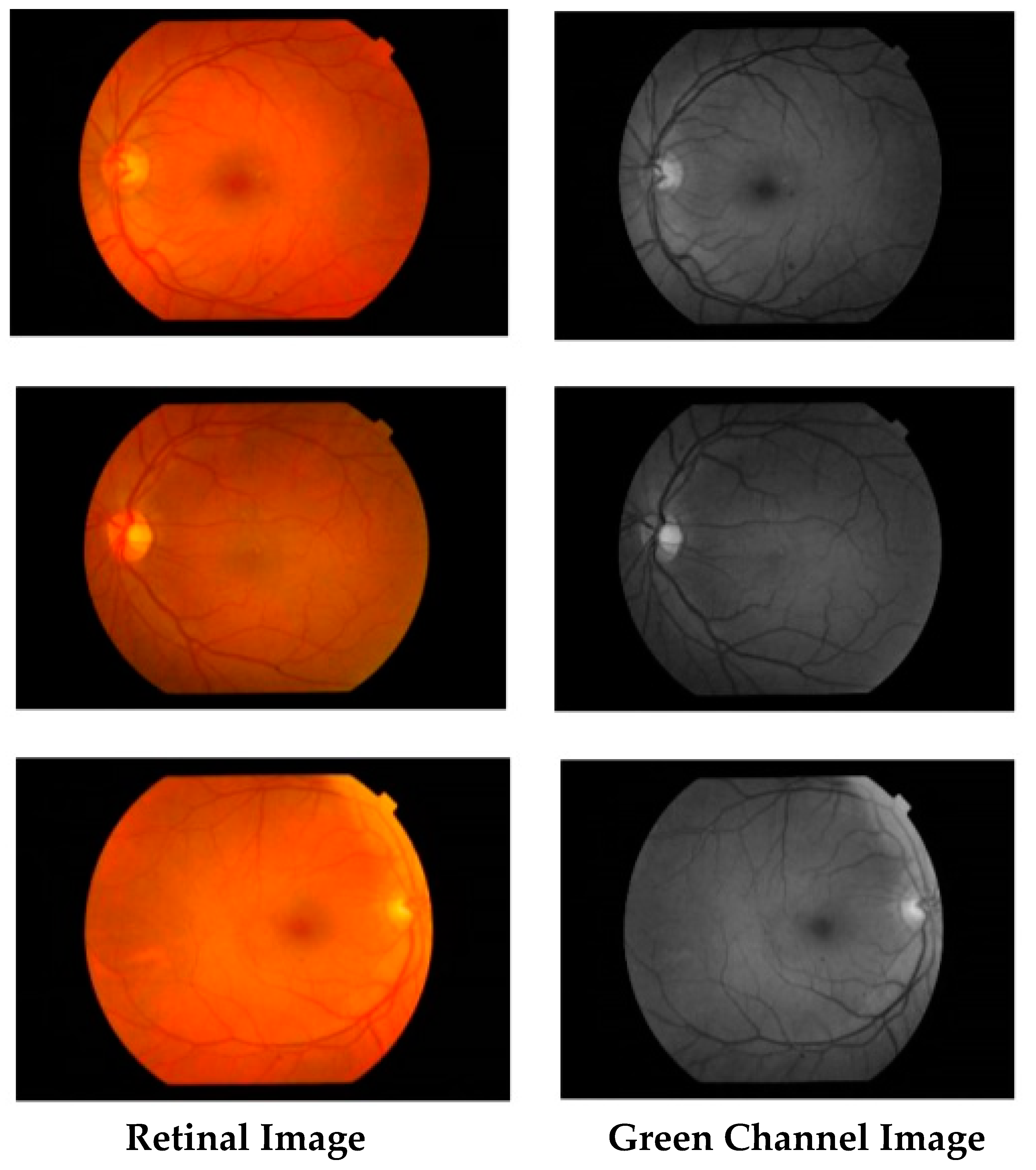
2.2.1. Green Channel Extraction
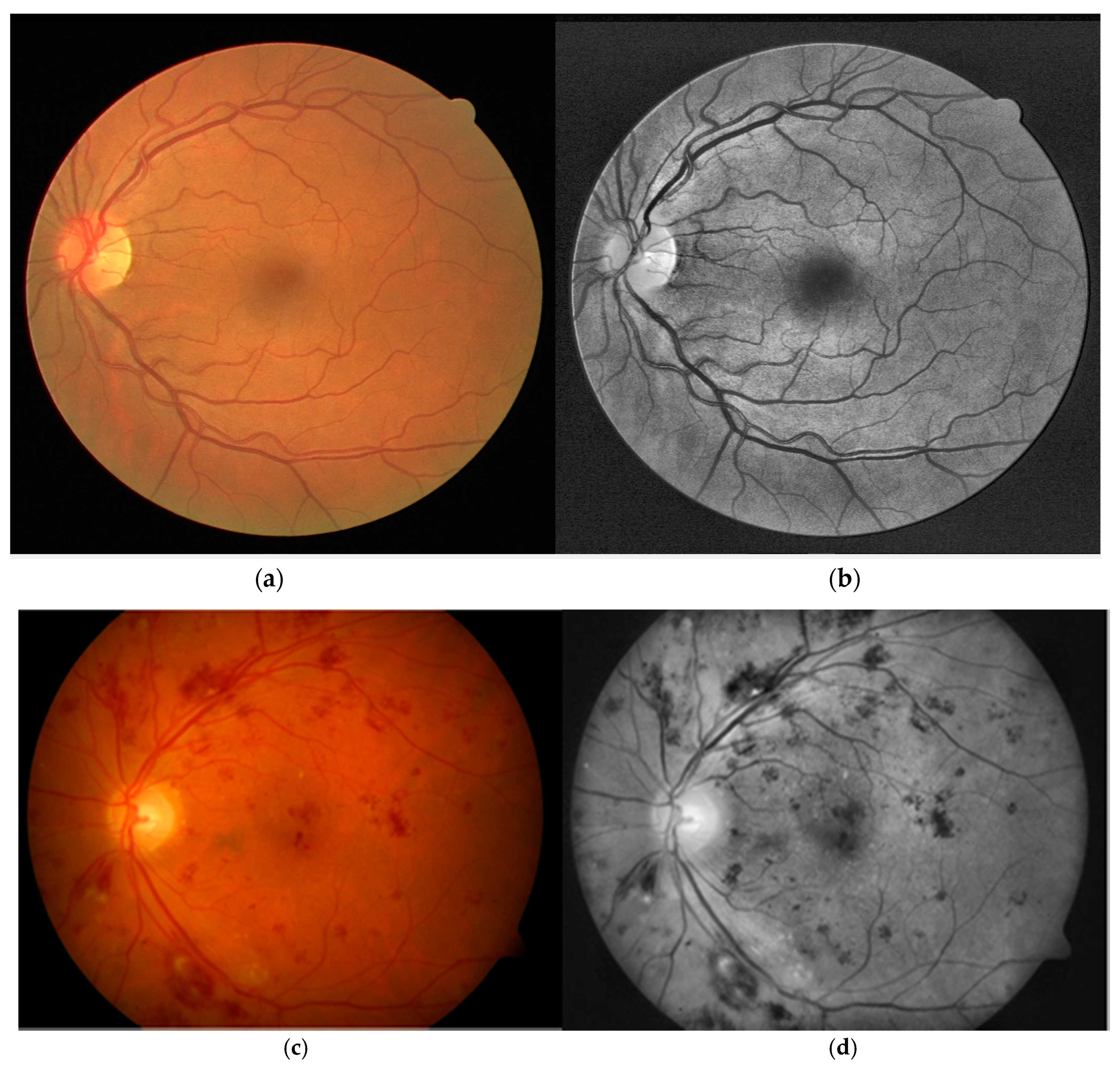
2.2.2. Contrast-Limited Adaptive Histogram Equalization (CLAHE)
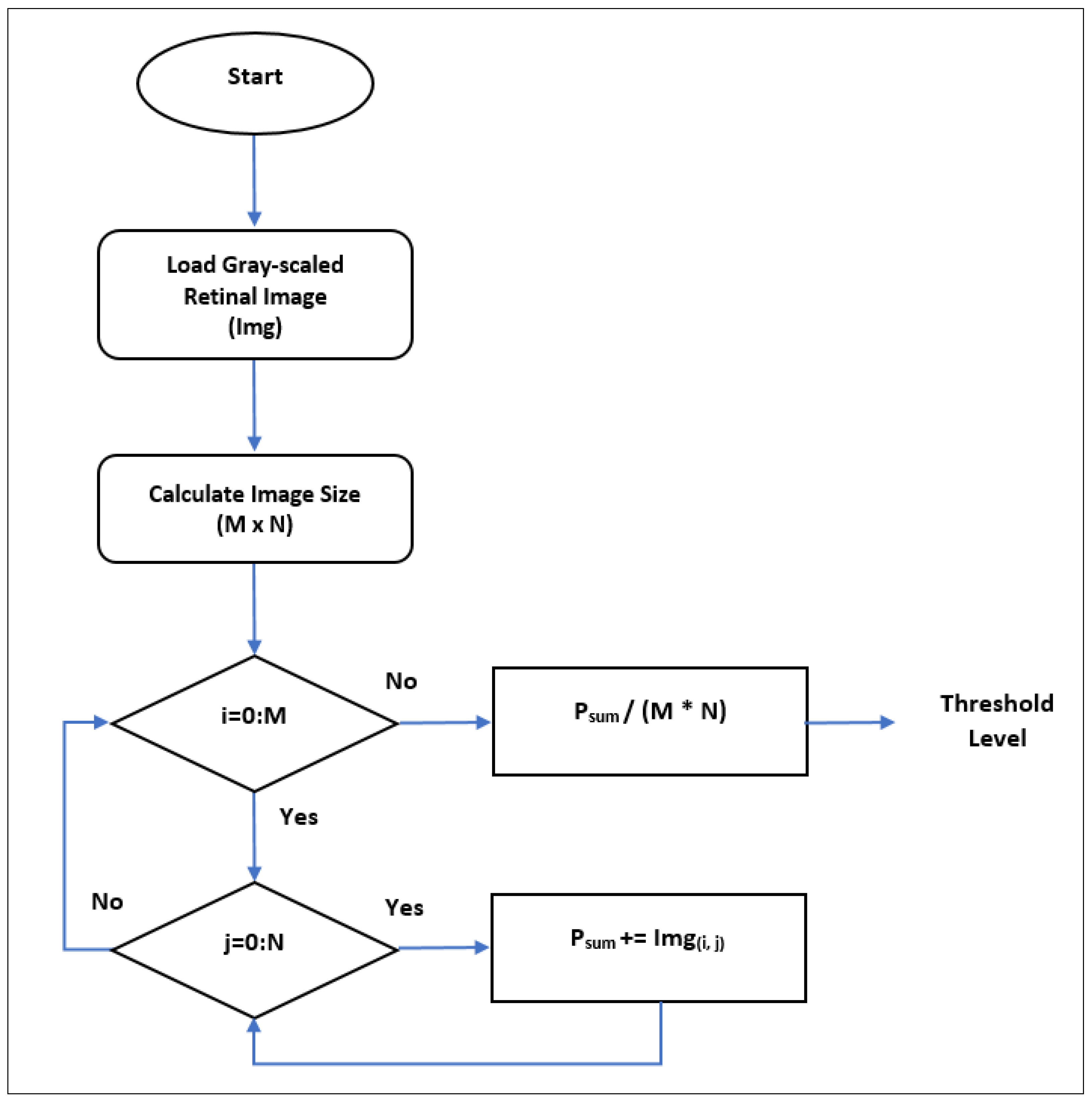
2.3. Calculation of the Average Brightness Level of Images
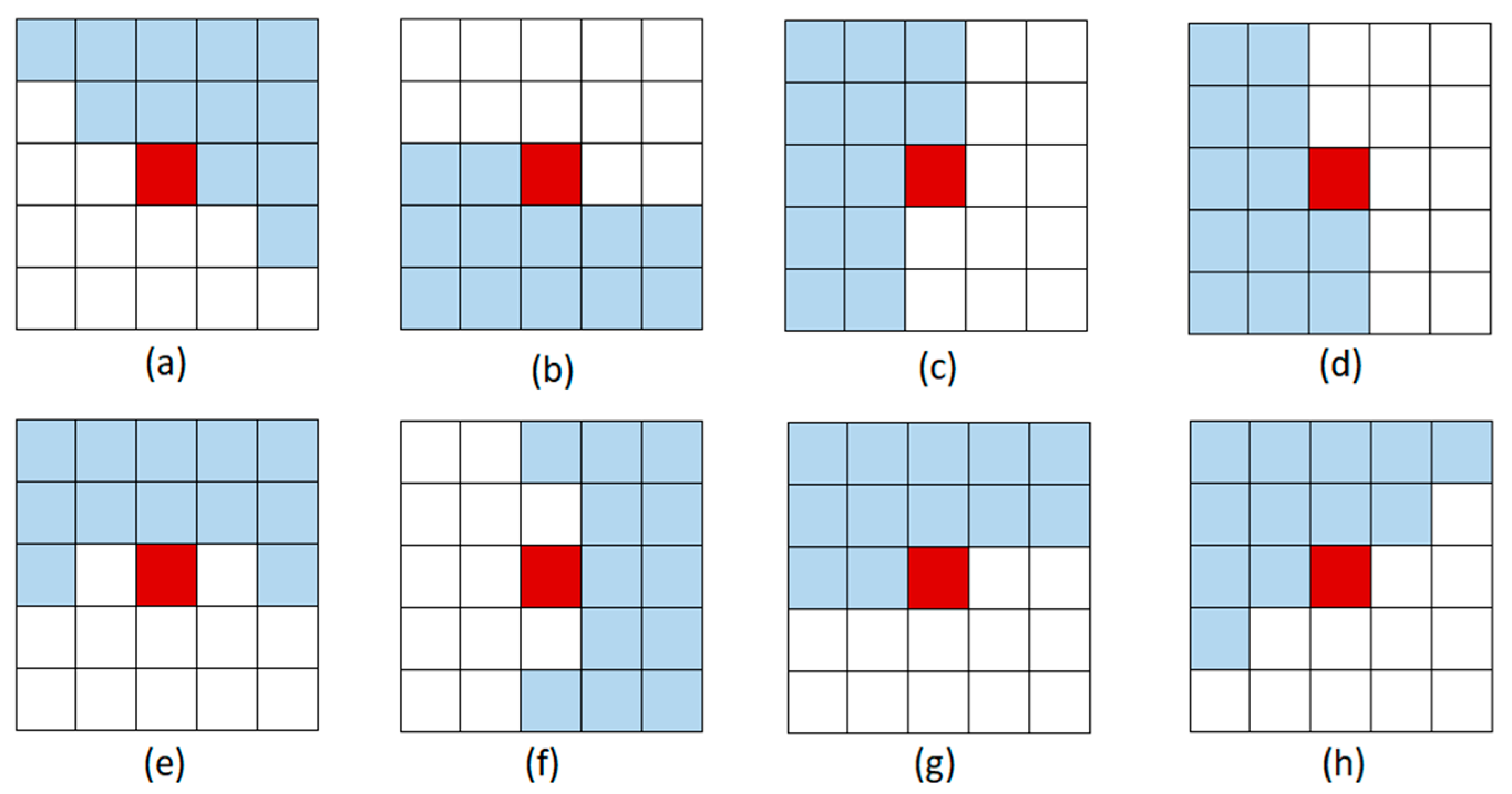
2.4. Implementing the Modified Robust Rank Order Test-Based Edge-Detection Algorithm
2.5. Circular Hough Transform
3. Experimental Results and Discussion
- Operating system: Windows 10, 64-bit
- Processor: Intel(R) Core(TM) i5-2430 CPU @2.40 GHz
- Memory: 8.00 GB RAM
- Computing environment: MATLAB R2016a
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kaur, J.; Sinha, D.H. Automated localisation of optic disc and macula from fundus images. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2012, 2, 242–249. [Google Scholar]
- Niemeijer, M.; Abràmoff, M.D.; Van Ginneken, B. Fast detection of the optic disc and fovea in color fundus photographs. Med. Image Anal. 2009, 13, 859–870. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, S.; Chen, J.; Pan, L.; Guo, J.; Yu, L. A novel method of macula fovea and optic disk automatic detection for retinal images. J. Electron. Inf. Technol. 2014, 36, 2586–2592. [Google Scholar]
- Gagnon, L.; Lalonde, M.; Beaulieu, M.; Boucher, M.-C. Procedure to detect anatomical structures in optical fundus images. In Proceedings of the Medical Imaging 2001: Image Processing, San Diego, CA, USA, 17–22 February 2001; pp. 1218–1226. [Google Scholar]
- Sinthanayothin, C.; Boyce, J.F.; Cook, H.L.; Williamson, T.H. Automated localisation of the optic disc, fovea, and retinal blood vessels from digital colour fundus images. Br. J. Ophthalmol. 1999, 83, 902–910. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, J.; Liu, J.; Xu, Y.; Yin, F.; Wong, D.W.K.; Tan, N.-M.; Tao, D.; Cheng, C.-Y.; Aung, T.; Wong, T.Y. Superpixel classification based optic disc and optic cup segmentation for glaucoma screening. IEEE Trans. Med. Imaging 2013, 32, 1019–1032. [Google Scholar] [CrossRef] [PubMed]
- Basit, A.; Egerton, S. Bio-medical imaging: Localization of main structures in retinal fundus images. In IOP Conference Series: Materials Science and Engineering; IOP Publishing Ltd.: Bristol, UK, 2013; p. 012009. [Google Scholar]
- Walter, T.; Klein, J.-C.; Massin, P.; Erginay, A.A. Contribution of image processing to the diagnosis of diabetic retinopathy-detection of exudates in color fundus images of the human retina. IEEE Trans. Med. Imaging 2002, 21, 1236–1243. [Google Scholar] [CrossRef] [PubMed]
- Welfer, D.; Scharcanski, J.; Marinho, D.R. A morphologic two-stage approach for automated optic disk detection in color eye fundus images. Pattern Recognit. Lett. 2013, 34, 476–485. [Google Scholar] [CrossRef]
- Dai, B.; Wu, X.; Bu, W. Optic disc segmentation based on variational model with multiple energies. Pattern Recognit. 2017, 64, 226–235. [Google Scholar] [CrossRef]
- Lowell, J.; Hunter, A.; Steel, D.; Basu, A.; Ryder, R.; Fletcher, E.; Kennedy, L. Optic nerve head segmentation. IEEE Trans. Med. Imaging 2004, 23, 256–264. [Google Scholar] [CrossRef]
- Li, H.; Chutatape, O. Automated feature extraction in color retinal images by a model based approach. IEEE Trans. Biomed. Eng. 2004, 51, 246–254. [Google Scholar] [CrossRef]
- Zhu, X.; Rangayyan, R.M.; Ells, A.L. Detection of the optic nerve head in fundus images of the retina using the hough transform for circles. J. Digit. Imaging 2010, 23, 332–341. [Google Scholar] [CrossRef] [PubMed]
- Zou, B.; Chen, C.; Zhu, C.; Duan, X.; Chen, Z. Classified optic disc localization algorithm based on verification model. Comput. Graph. 2018, 70, 281–287. [Google Scholar] [CrossRef]
- Ravishankar, S.; Jain, A.; Mittal, A. Automated feature extraction for early detection of diabetic retinopathy in fundus images. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2009), Miami, FL, USA, 20–25 June 2009; pp. 210–217. [Google Scholar]
- Pereira, C.; Gonçalves, L.; Ferreira, M. Optic disc detection in color fundus images using ant colony optimization. Med. Biol. Eng. Comput. 2013, 51, 295–303. [Google Scholar] [CrossRef] [PubMed]
- Kamble, R.; Kokare, M.; Deshmukh, G.; Hussin, F.A.; Mériaudeau, F. Localization of optic disc and fovea in retinal images using intensity based line scanning analysis. Comput. Biol. Med. 2017, 87, 382–396. [Google Scholar] [CrossRef] [PubMed]
- Sarathi, M.P.; Dutta, M.K.; Singh, A.; Travieso, C.M. Blood vessel inpainting based technique for efficient localization and segmentation of optic disc in digital fundus images. Biomed. Signal Process. Control 2016, 25, 108–117. [Google Scholar] [CrossRef]
- Harangi, B.; Hajdu, A. Detection of the optic disc in fundus images by combining probability models. Comput. Biol. Med. 2015, 65, 10–24. [Google Scholar] [CrossRef] [PubMed]
- Al-Bander, B.; Al-Nuaimy, W.; Williams, B.M.; Zheng, Y. Multiscale sequential convolutional neural networks for simultaneous detection of fovea and optic disc. Biomed. Signal Process. Control 2018, 40, 91–101. [Google Scholar] [CrossRef]
- Abed, S.E.; Al-Roomi, S.A.; Al-Shayeji, M. Effective optic disc detection method based on swarm intelligence techniques and novel pre-processing steps. Appl. Soft Comput. 2016, 49, 146–163. [Google Scholar] [CrossRef]
- Li, A.; Niu, Z.; Cheng, J.; Yin, F.; Wong, D.W.K.; Yan, S.; Liu, J. Learning supervised descent directions for optic disc segmentation. Neurocomputing 2018, 275, 350–357. [Google Scholar] [CrossRef]
- Hsiao, H.-K.; Liu, C.-C.; Yu, C.-Y.; Kuo, S.-W.; Yu, S.-S. A novel optic disc detection scheme on retinal images. Expert Syst. Appl. 2012, 39, 10600–10606. [Google Scholar] [CrossRef]
- Şevik, U. Retinal Image Quality Assessment and Detection of Diabetic Retinopathy Disease. Ph.D. Thesis, Karadeniz Technical University, Trabzon, Turkey, 2014. [Google Scholar]
- Duman, E.; Erdem, O.A. A statistical edge detection framework for noisy images. In Proceedings of the 2018 26th Signal Processing and Communications Applications Conference (SIU), Izmir, Turkey, 2–5 May 2018. [Google Scholar]
- Lim, D.H. Robust edge detection in noisy images. Comput. Stat. Data Anal. 2006, 50, 803–812. [Google Scholar] [CrossRef]
- Staal, J.; Abràmoff, M.D.; Niemeijer, M.; Viergever, M.A.; Van Ginneken, B. Ridge-based vessel segmentation in color images of the retina. IEEE Trans. Med. Imaging 2004, 23, 501–509. [Google Scholar] [CrossRef] [PubMed]
- Kauppi, T.; Kalesnykiene, V.; Kamarainen, J.-K.; Lensu, L.; Sorri, I.; Uusitalo, H.; Kälviäinen, H.; Pietilä, J. DIARETDB0: Evaluation Database and Methodology for Diabetic Retinopathy Algorithms; Machine Vision and Pattern Recognition Research Group, Lappeenranta University of Technology: Lappeenranta, Finland, 2006; Volume 73. [Google Scholar]
- Kälviäinen, R.; Uusitalo, H. DIARETDB1 diabetic retinopathy database and evaluation protocol. Med. Image Understand. Anal. 2007, 2007, 61. [Google Scholar]
- Miri, M.S.; Mahloojifar, A. Retinal image analysis using curvelet transform and multistructure elements morphology by reconstruction. IEEE Trans. Biomed. Eng. 2011, 58, 1183–1192. [Google Scholar] [CrossRef] [PubMed]
- Perfetti, R.; Ricci, E.; Casali, D.; Costantini, G. Cellular neural networks with virtual template expansion for retinal vessel segmentation. IEEE Trans. Circuits Syst. II 2007, 54, 141–145. [Google Scholar] [CrossRef]
- Patwari, M.B.; Manza, R.R.; Rajput, Y.M.; Saswade, M.; Deshpande, N. Automatic detection of retinal venous beading and tortuosity by using image processing techniques. Int. J. Comput. Appl. 2014, 0975–8887, 27–32. [Google Scholar]
- Burçin, K.; Nabiyev, V.V. Dijital Mamografi Görüntülerinin Kontrast Sınırlı Adaptif Histogram Eşitleme ile Iyileştirilmesi. In Proceedings of the VII. Ulusal Tıp Bilişimi Kongresi, Gazimağusa, KKTC, 14–17 October 2010. [Google Scholar]
- Göreke, V.; Uzunhisarcıklı, E.; Güven, A. Gri Seviyeli Eşoluşum Matrisleri Kullanılarak Sayısal Mamogram Görüntüsünden Doku Özniteliklerinin Çıkarılması ve Yapay Sinir Ağı ile Kitle Tespiti. In Proceedings of the Tıp Teknolojileri Ulusal Kongresi-TıpTekno’14, Nevşehir, Turkey, 25–27 September 2014. [Google Scholar]
- Reza, A.M. Realization of the contrast limited adaptive histogram equalization (CLAHE) for real-time image enhancement. J. VLSI Signal Process. Syst. Signal Image Video Technol. 2004, 38, 35–44. [Google Scholar] [CrossRef]
- Fisher, R.A. The Design of Experiments; Oliver and Boyd: Edinburgh, UK, 1937. [Google Scholar]
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef] [Green Version]
- Duman, E.; Kökver, Y.; Ünver, H.M.; Erdem, O.A. Automatic landmark detection through circular hough transform in cephalometric X-rays. In Proceedings of the 2017 10th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 30 November–2 December 2017; pp. 583–587. [Google Scholar]
- Alioua, N.; Amine, A.; Rziza, M.; Aboutajdine, D. Eye state analysis using iris detection based on Circular Hough Transform. In Proceedings of the 2011 International Conference on Multimedia Computing and Systems (ICMCS), Ouarzazate, Morocco, 7–9 April 2011; pp. 1–5. [Google Scholar]
- Hoover, A.; Goldbaum, M. Locating the optic nerve in a retinal image using the fuzzy convergence of the blood vessels. IEEE Trans. Med. Imaging 2003, 22, 951–958. [Google Scholar] [CrossRef] [Green Version]
- Bharkad, S. Automatic segmentation of optic disk in retinal images. Biomed. Signal Process. Control 2017, 31, 483–498. [Google Scholar] [CrossRef]
- Ahmed, M.I.; Amin, M.A. High speed detection of optical disc in retinal fundus image. Signal Image Video Process. 2015, 9, 77–85. [Google Scholar] [CrossRef]
- Youssif, A.A.; Ghalwash, A.Z.; Ghoneim, A.A. Optic disc detection from normalized digital fundus images by means of a vessels’ direction matched filter. IEEE Trans. Med. Imaging 2008, 27, 11–18. [Google Scholar] [CrossRef] [PubMed]
- Rangayyan, R.M.; Zhu, X.; Ayres, F.J.; Ells, A.L. Detection of the optic nerve head in fundus images of the retina with Gabor filters and phase portrait analysis. J. Digit. Imaging 2010, 23, 438–453. [Google Scholar] [CrossRef]
- Dehghani, A.; Moghaddam, H.A.; Moin, M.-S. Optic disc localization in retinal images using histogram matching. EURASIP J. Image Video Process. 2012, 2012, 19. [Google Scholar] [CrossRef] [Green Version]
- Mahfouz, A.E.; Fahmy, A.S. Fast localization of the optic disc using projection of image features. IEEE Trans. Image Process. 2010, 19, 3285–3289. [Google Scholar] [CrossRef] [PubMed]
- Sinha, N.; Babu, R.V. Optic disk localization using L 1 minimization. In Proceedings of the 2012 19th IEEE International Conference on Image Processing (ICIP), Orlando, FL, USA, 30 September–3 October 2012; pp. 2829–2832. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Database | Normal Images | Diseased Images | Total |
|---|---|---|---|
| DRIVE | 33 | 7 | 40 |
| DIARETDB0 | 20 | 110 | 130 |
| DIARETDB1 | 5 | 84 | 89 |
| Method | Dataset | Number of Images | Correct Classification | Accuracy (%) | Distance |
|---|---|---|---|---|---|
| Pereira et al. [16] | DRIVE | 40 | 40 | 100 | - |
| DIARETDB1 | 89 | 83 | 93.25 | - | |
| Ahmad and Amin [42] | DRIVE | 40 | 39 | 97.5 | - |
| DIARETDB1 | 89 | 86 | 96.5 | - | |
| Youssif et al. [43] | DRIVE | 40 | 40 | 100 | 17 |
| Rangayyan et al. [44] | DRIVE | 40 | 40 | 100 | 23.2 |
| Dehghani et al. [45] | DRIVE | 40 | 40 | 100 | 15.9 |
| Zhu et al. [13] | DRIVE | 40 | 36 | 90 | 18 |
| Bharkad [41] | DRIVE | 40 | 40 | 100 | 9.12 |
| DIARETDB0 | 130 | 126 | 96.92 | 11.83 | |
| DIARETDB1 | 89 | 88 | 98.88 | 13.00 | |
| Mahfouz and Fahmy [46] | DRIVE | 40 | 40 | 100 | - |
| DIARETDB0 | 130 | 128 | 98.5 | - | |
| DIARETDB1 | 89 | 87 | 97.8 | - | |
| Sinha and Babu [47] | DRIVE | 40 | 38 | 95 | - |
| DIARETDB0 | 130 | 126 | 96.9 | - | |
| DIARETDB1 | 89 | 89 | 100 | - | |
| Proposed Method | DRIVE | 40 | 40 | 100 | 10.07 |
| DIARETDB0 | 130 | 126 | 96.92 | 10.54 | |
| DIARETDB1 | 89 | 88 | 98.88 | 12.36 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ünver, H.M.; Kökver, Y.; Duman, E.; Erdem, O.A. Statistical Edge Detection and Circular Hough Transform for Optic Disk Localization. Appl. Sci. 2019, 9, 350. https://doi.org/10.3390/app9020350
Ünver HM, Kökver Y, Duman E, Erdem OA. Statistical Edge Detection and Circular Hough Transform for Optic Disk Localization. Applied Sciences. 2019; 9(2):350. https://doi.org/10.3390/app9020350
Chicago/Turabian StyleÜnver, Halil Murat, Yunus Kökver, Elvan Duman, and Osman Ayhan Erdem. 2019. "Statistical Edge Detection and Circular Hough Transform for Optic Disk Localization" Applied Sciences 9, no. 2: 350. https://doi.org/10.3390/app9020350
APA StyleÜnver, H. M., Kökver, Y., Duman, E., & Erdem, O. A. (2019). Statistical Edge Detection and Circular Hough Transform for Optic Disk Localization. Applied Sciences, 9(2), 350. https://doi.org/10.3390/app9020350