Imaging Correlography Using Ptychography

 , ,
, ,
Abstract
:Featured Application
Abstract
1. Introduction
2. Method
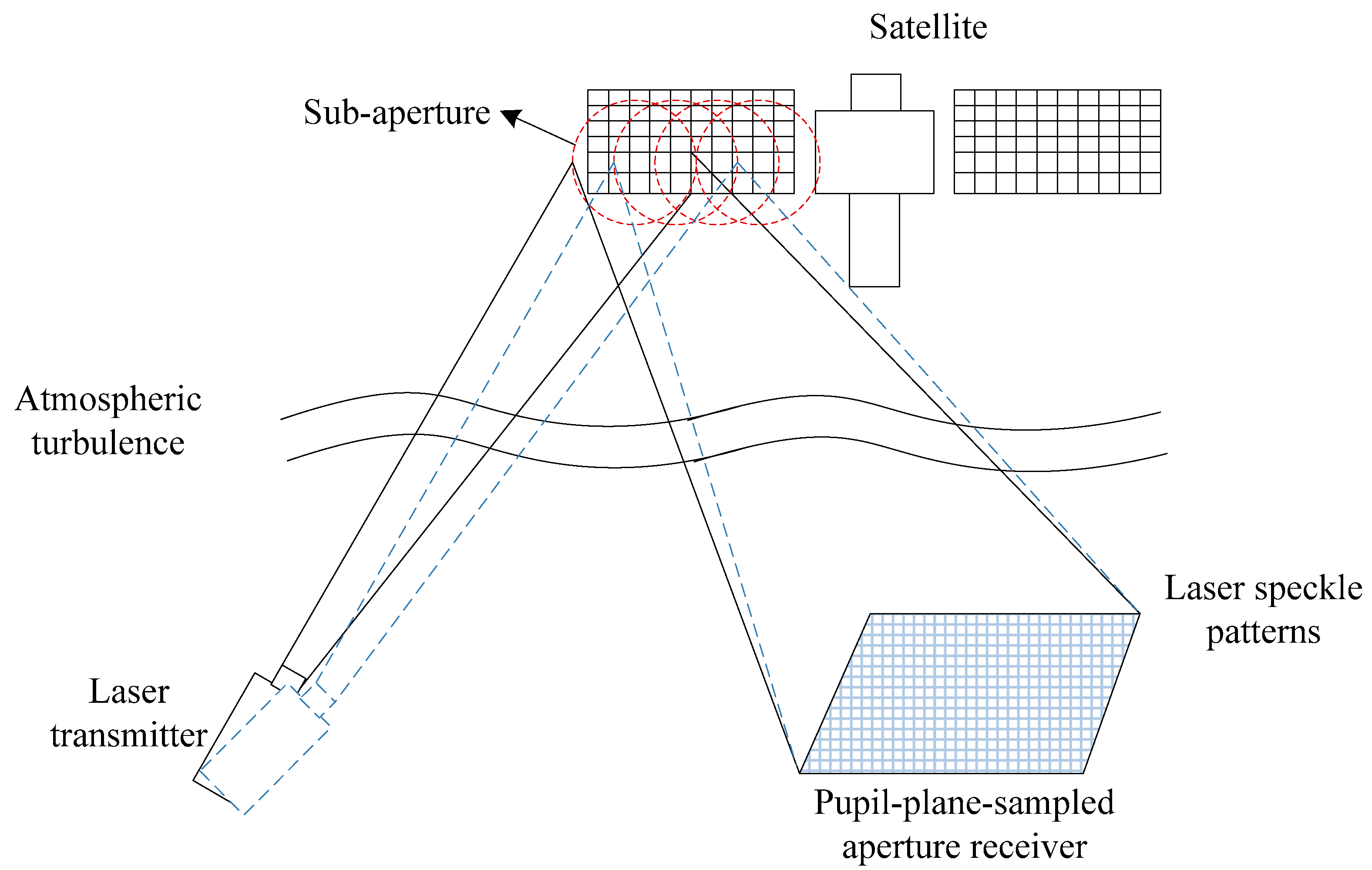
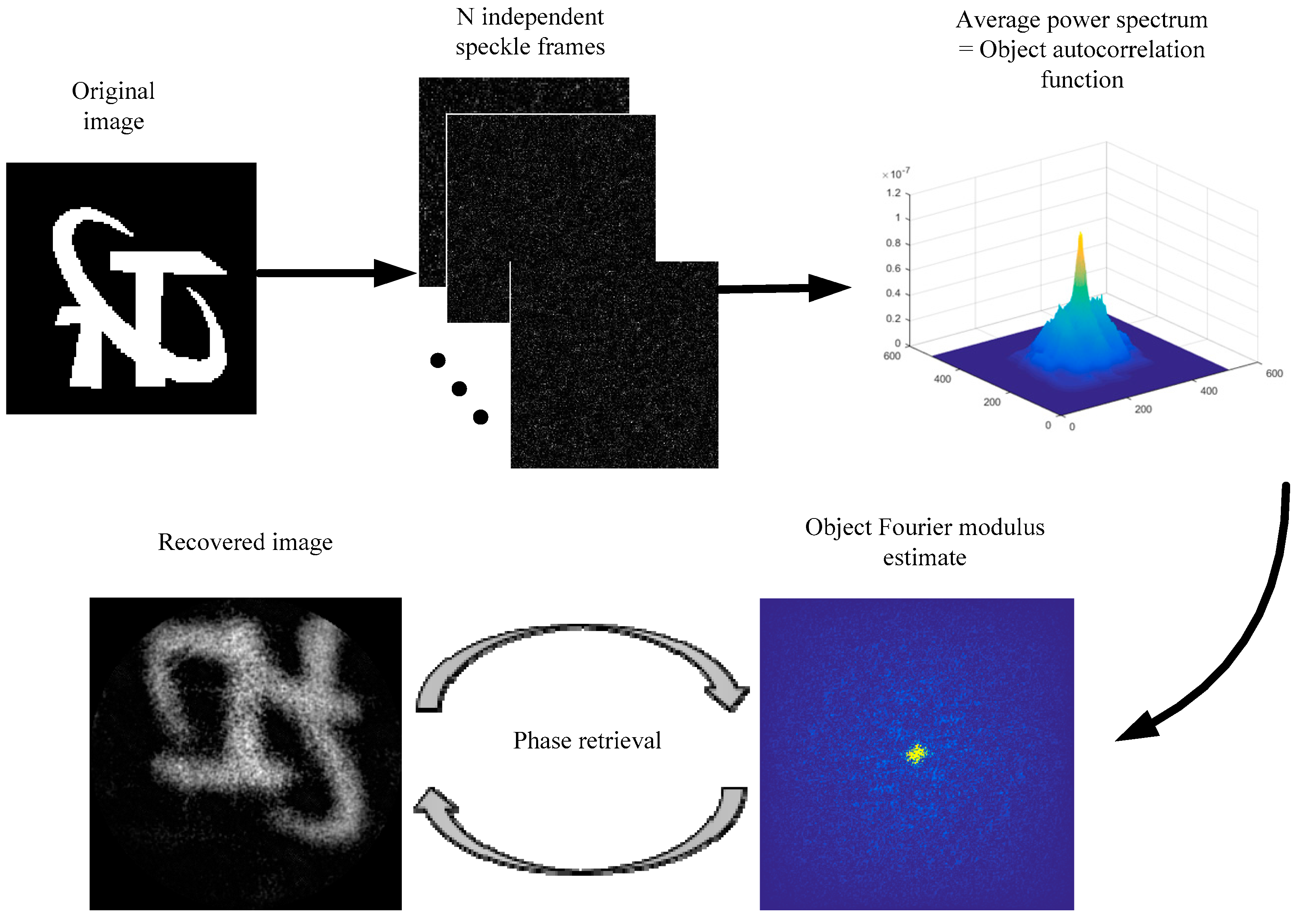
2.1. Image Formation Model for Imaging Correlography
2.2. Imaging Correlography with Ptychography
2.3. Optimization Framework
2.3.1. Image Recovery and Regularization
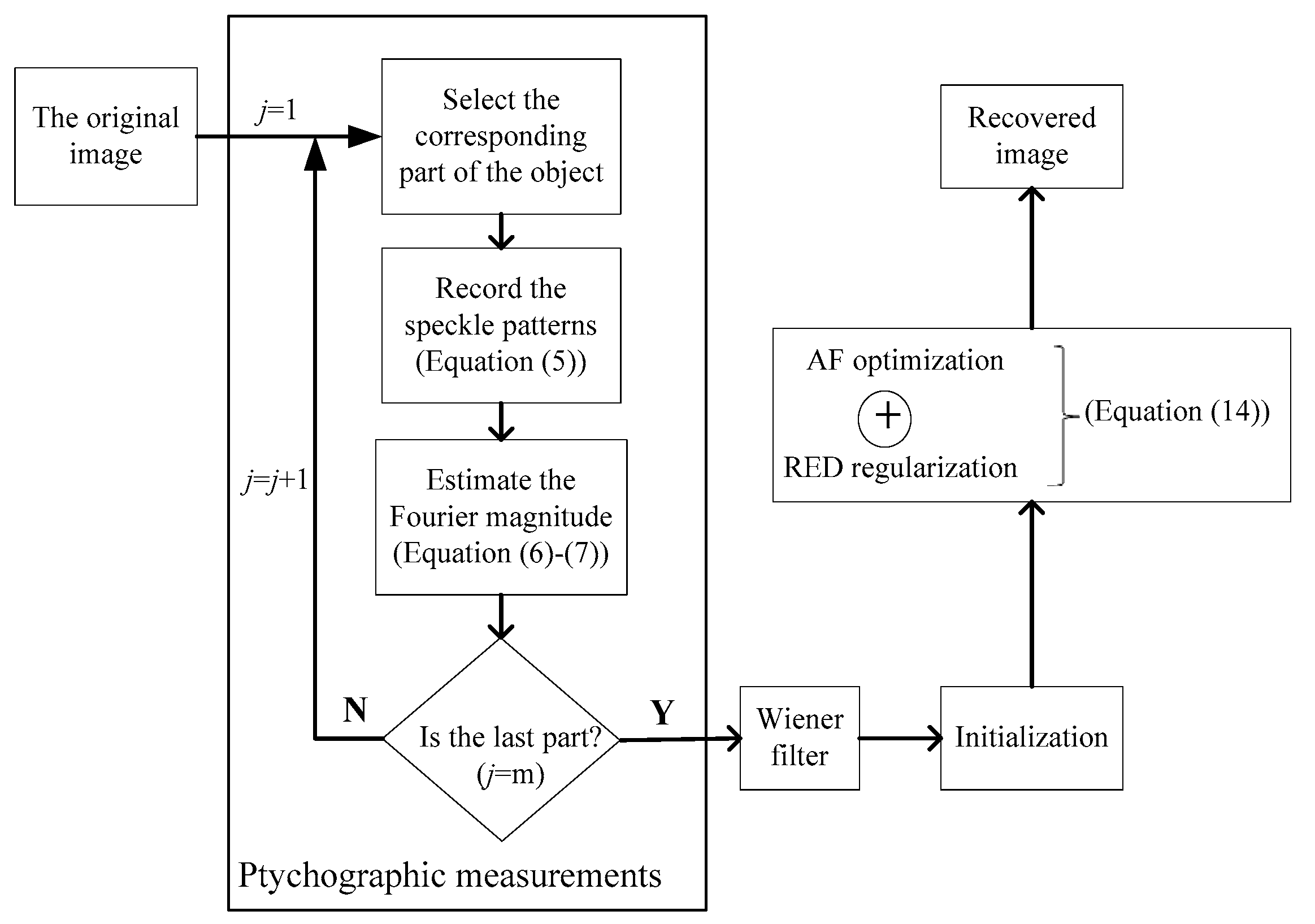
| Algorithm 1: The reconstruction framework for ptychographic imaging correlography. |
| Input: Estimated Fourier magnitudes ; sampling matrix . Output: Recovered image .
|
2.3.2. Initialization
3. Experiments and Results
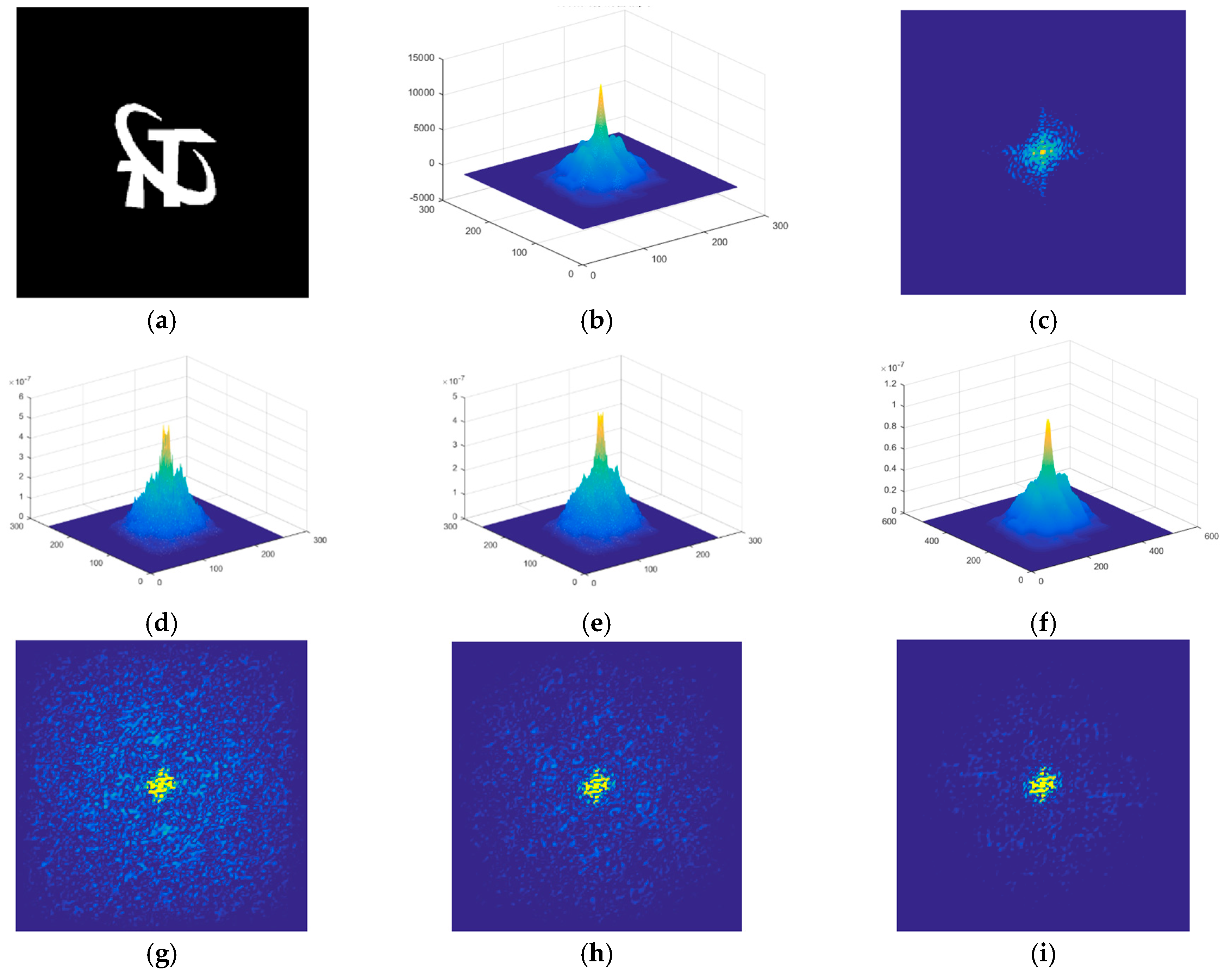
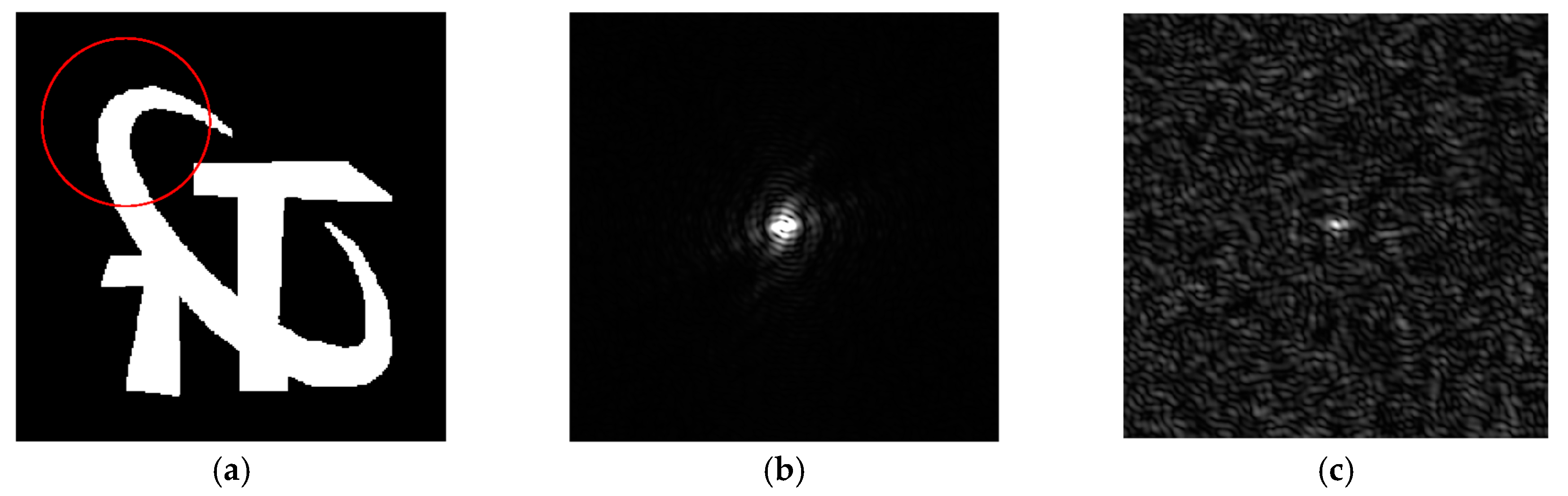
3.1. Numerical Simulation and Criterion
3.2. Results
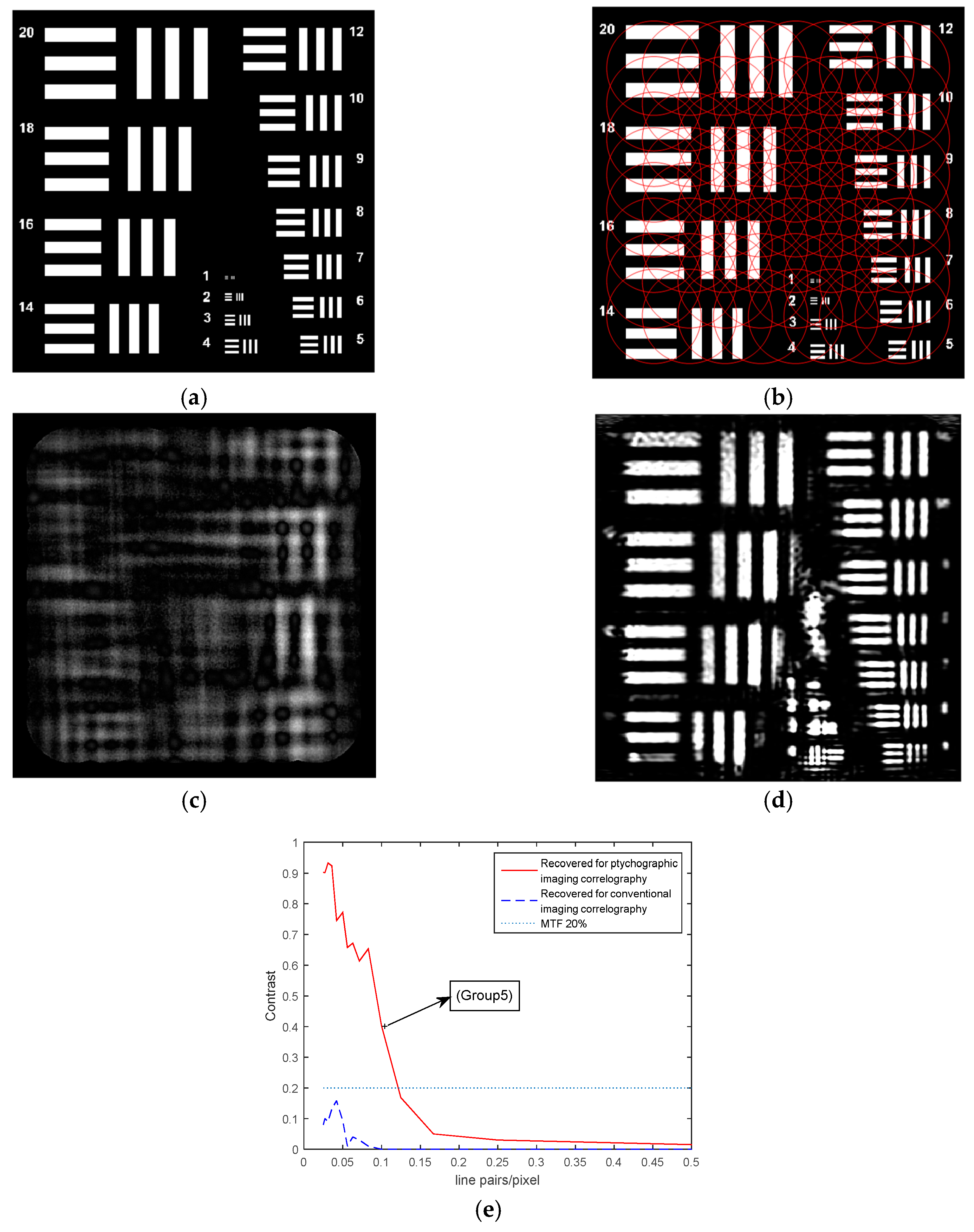
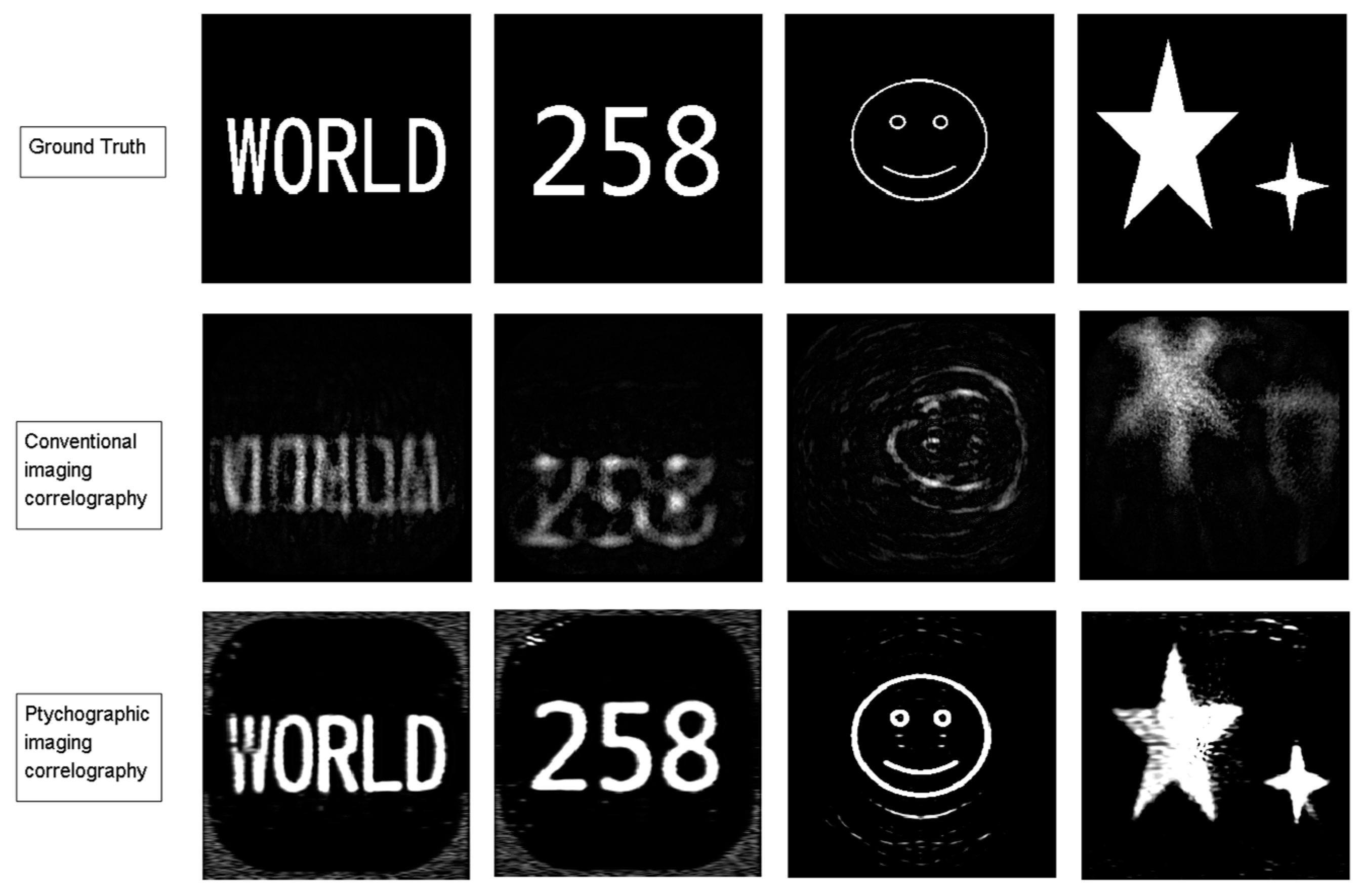
3.2.1. Recovery Performance Analysis
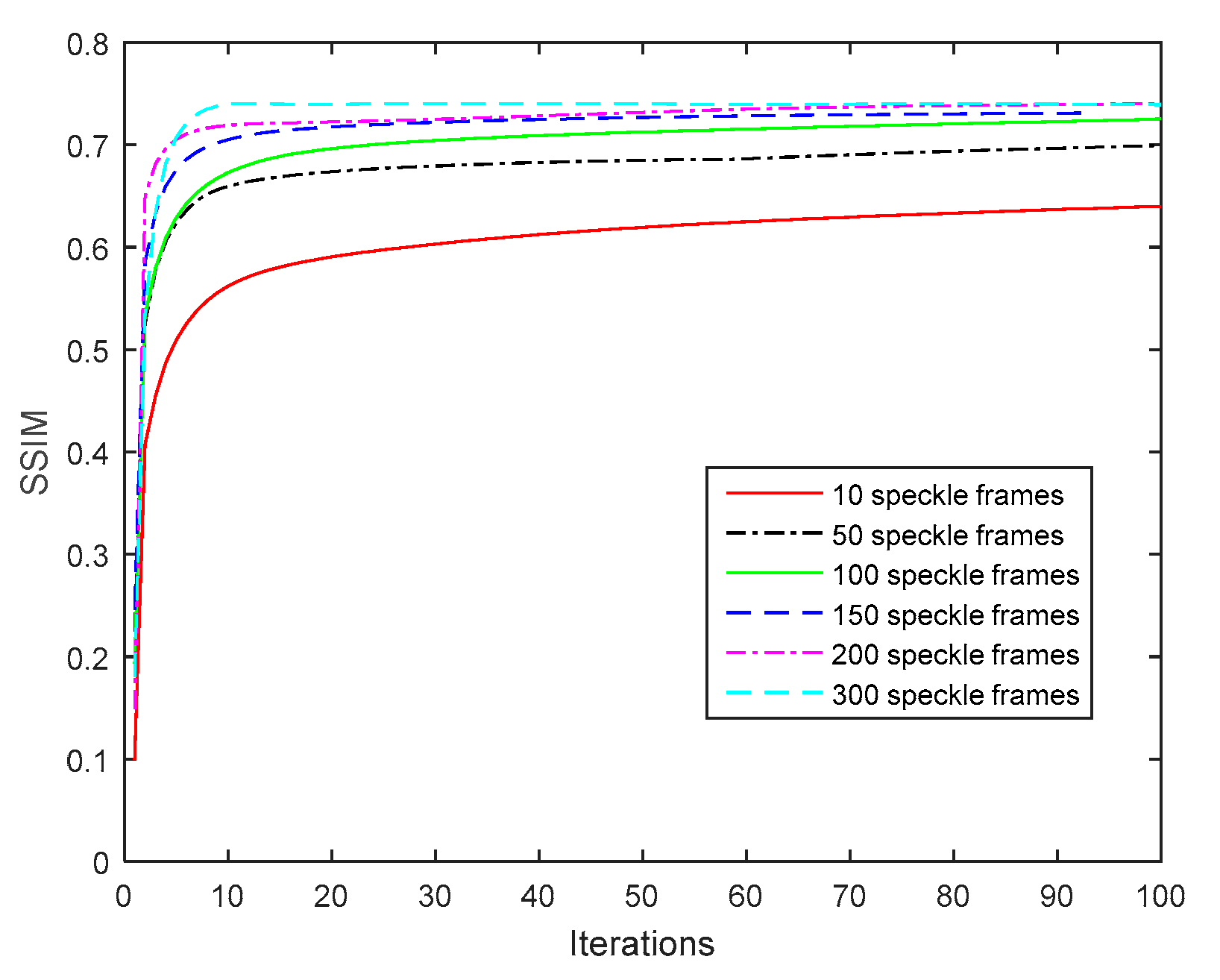
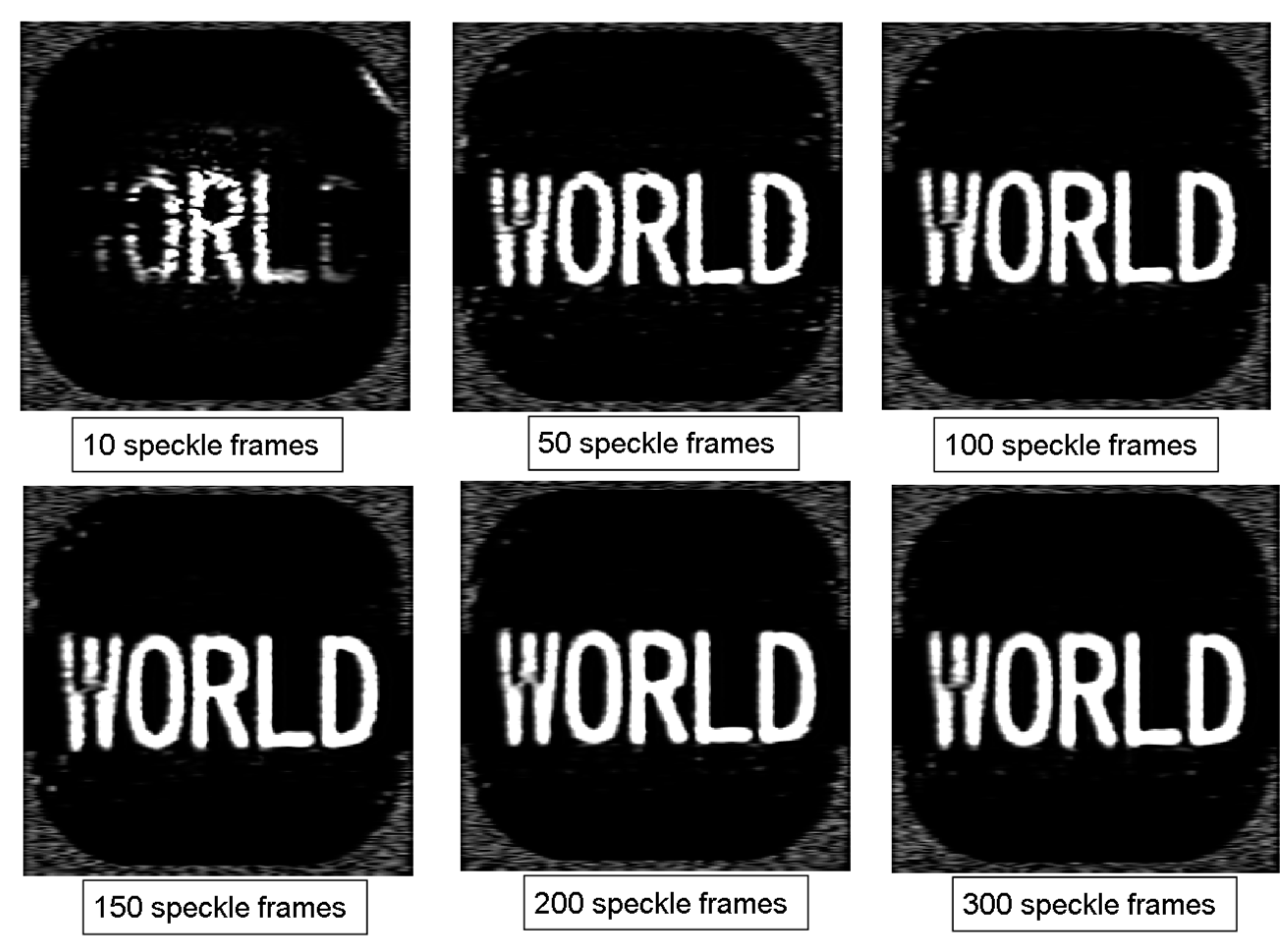
3.2.2. Effect of the Number of Speckle Patterns
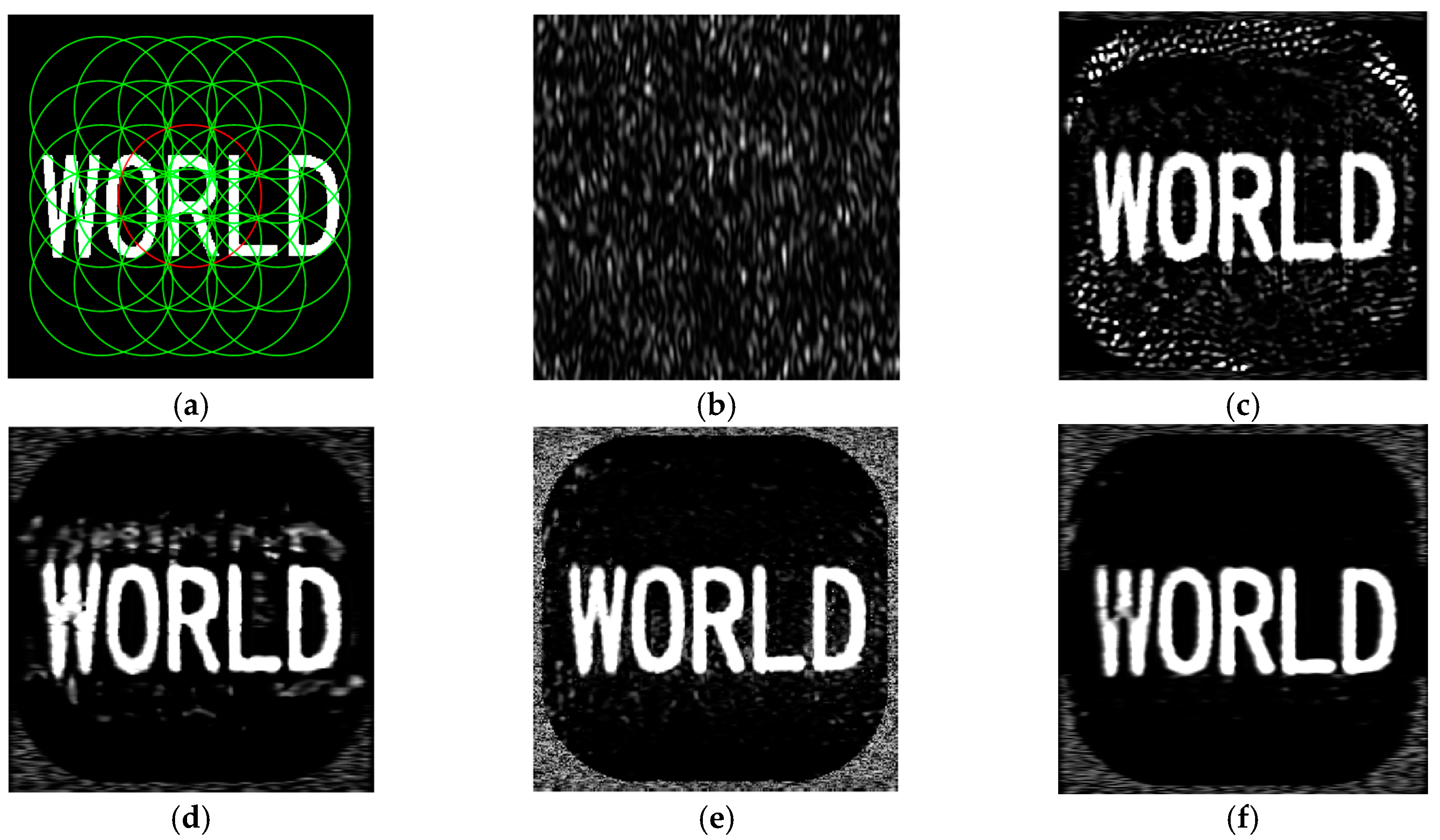
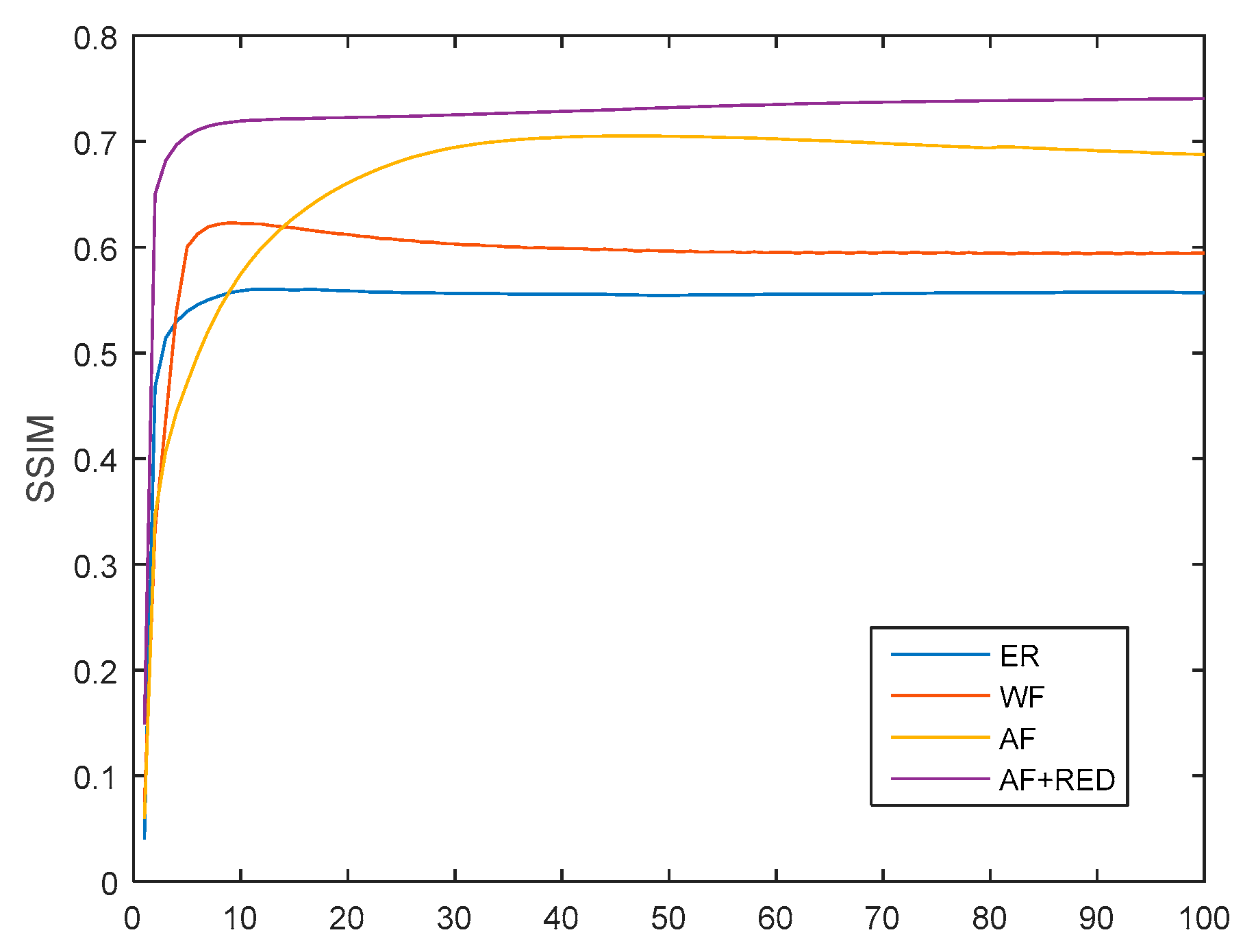
3.2.3. Effect of the Reconstruction Algorithm
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Idell, P.S.; Fienup, J.R. Imaging correlography: A new approach to active imaging. In Proceedings of the Twelfth DARPA Strategic Systems Symposium Riverside Research Institute, Naval Postgraduate School, Monterey, CA, USA, 28–30 October 1986; pp. 141–151. [Google Scholar]
- Fienup, J.R. Imaging Correlography with Sparse Arrays of Detectors. Opt. Eng. 1988, 27, 279778. [Google Scholar] [CrossRef]
- Idell, P.S.; Goodman, R.S. Image synthesis from nonimaged laser speckle patterns. Opt. Lett. 1987, 12, 858–860. [Google Scholar] [CrossRef] [PubMed]
- Bracewell, R.N. The Fourier Transform and Its Applications; McGraw–Hill: New York, NY, USA, 1978; p. 115. [Google Scholar]
- Elbaum, M.; King, M.; Greenebaum, M. Laser Correlography: Transmission of High-Resolution Object Signatures through the Turbulent Atmosphere; Tech. Rep. T-1/306-3-11; Riverside Research Intstitute: New York, NY, USA, 1974. [Google Scholar]
- Fienup, J.R. Space object imaging through the turbulent atmosphere. Opt. Eng. 1979, 18, 185529. [Google Scholar] [CrossRef]
- Voelz, D.G.; Gonglewski, J.D.; Idell, P.S. Image synthesis from nonimaged laser-speckle patterns: Comparison of theory, computer simulation, and laboratory results. Appl. Opt. 1991, 30, 3333–3344. [Google Scholar] [CrossRef]
- Idell, P.S.; Gonglewski, J.D.; Voelz, D.G.; Knopp, J. Image synthesis from nonimaged laser-speckle patterns: Experimental verification. Opt. Lett. 1989, 14, 154–156. [Google Scholar] [CrossRef]
- Thurin, B.; Diaz-Santana, L. Imaging correlography applied to high resolution retinal imaging. In Proceedings of the European Conference on Biomedical Optics (ECBO), Munich, Germany, 17–21 June 2007; pp. 6631–6656. [Google Scholar]
- Edrei, E.; Scarcelli, G. Optical imaging through dynamic turbid media using the Fourier-domain shower-curtain effect. Optica 2016, 3, 71–74. [Google Scholar] [CrossRef] [Green Version]
- Hegerl, R.; Hoppe, W. Dynamische theorie der kristallstrukturanalyse durch elektronenbeugung im inhomogenen primarstrahlwellenfeld. Ber. Bunsenges. Physik. Chem. 1970, 74, 1148–1154. [Google Scholar] [CrossRef]
- Bates, R.H.T.; Rodenburg, J.M. Sub-Ångström transmission microscopy: A Fourier transform algorithm for microdiffraction plane intensity information. Ultramicroscopy 1989, 31, 303–307. [Google Scholar] [CrossRef]
- Rodenburg, J.M.; John, M.; Faulkner, H.M. A phase retrieval algorithm for shifting illumination. Appl. Phys. Lett. 2004, 85, 4795–4797. [Google Scholar] [CrossRef] [Green Version]
- Humphry, M.J.; Kraus, B.; Hurst, A.C.; Maiden, A.M.; Rodenburg, J.M. Ptychographic electron microscopy using high-angle dark-field scattering for sub-nanometre resolution imaging. Nat. Commun. 2012, 3, 730. [Google Scholar] [CrossRef]
- Rodenburg, J.M.; Hurst, A.C.; Cullis, A.G.; Dobson, B.R.; Pfeiffer, F.; Bunk, O.; David, C.; Jefimovs, K.; Johnson, I. Hard-X-ray lensless imaging of extended objects. Phys. Rev. Lett. 2007, 98, 034801. [Google Scholar] [CrossRef] [PubMed]
- Rodenburg, J.M.; Hurst, A.C.; Cullis, A.G. Transmission microscopy without lenses for objects of unlimited size. Ultramicroscopy 2007, 107, 227–231. [Google Scholar] [CrossRef] [PubMed]
- Roddier, F. Interferometric imaging in optical astronomy. Phys. Rep. 1988, 170, 97–166. [Google Scholar] [CrossRef]
- Tippie, A.E.; Kumar, A.; Fienup, J.R. High-resolution synthetic-aperture digital holography with digital phase and pupil correlation. Opt. Express 2011, 19, 12027–12038. [Google Scholar] [CrossRef]
- Dong, S.; Horstmeyer, R.; Shiradkar, R.; Guo, K.; Ou, X.; Bian, Z.; Xin, H.; Zheng, G. Aperture-scanning Fourier ptychography for 3D refocusing and super-resolution macroscopic imaging. Opt. Express 2014, 22, 13586–13599. [Google Scholar] [CrossRef]
- Holloway, J.; Asif, M.S.; Sharma, M.K.; Matsuda, N.; Horstmeyer, R.; Cossairt, O.; Veeraraghavan, A. Toward long-distance subdiffraction imaging using coherent camera arrays. IEEE Trans. Comput. Imaging 2016, 2, 251–265. [Google Scholar] [CrossRef]
- Holloway, J.; Wu, Y.; Sharma, M.K.; Cossairt, O.; Veeraraghavan, A. SAVI: Synthetic apertures for long-range, subdiffraction-limited visible imaging using Fourier ptychography. Sci. Adv. 2017, 3, e1602564. [Google Scholar] [CrossRef]
- Dainty, J.C. Laser Speckle and Related Phenomena; Springer Science & Business Media: Berlin, Germany, 2013; pp. 9–74. [Google Scholar]
- Wang, W.; Chen, H.; Yuan, Y.; Han, Q.; Wang, G.; Zheng, H.; Liu, J.; Xu, Z. Ptychographical intensity interferometry imaging with incoherent light. Opt. Express 2018, 26, 20396–20408. [Google Scholar] [CrossRef]
- Gardner, D.F.; Divitt, S.; Watnik, A.T. Ptychographic imaging of incoherently illuminated extended objects using speckle correlations. Appl. Opt. 2019, 58, 3564–3569. [Google Scholar] [CrossRef]
- Li, G.; Yang, W.; Wang, H.; Situ, G. Image transmission through scattering media using ptychographic iterative engine. Appl. Sci. 2019, 9, 849. [Google Scholar] [CrossRef]
- Freundk, I.; Rosenbluh, M.; Feng, S. Memory effects in propagation of optical waves through disordered media. Phys. Rev. Lett. 1988, 61, 2328. [Google Scholar] [CrossRef] [PubMed]
- Feng, S.; Kane, C.; Lee, P.A.; Stone, A.D. Correlations and fluctuations of coherent wave transmission through disordered media. Phys. Rev. Lett. 1988, 61, 834. [Google Scholar] [CrossRef] [PubMed]
- Katz, O.; Heidmann, P.; Fink, M.; Gigan, S. Non-invasive single-shot imaging through scattering layers and around corners via speckle correlations. Nat. Photonics 2014, 8, 784–790. [Google Scholar] [CrossRef]
- Fienup, J.R. Lensless coherent imaging by phase retrieval with an illumination pattern constraint. Opt. Express 2006, 14, 498–508. [Google Scholar] [CrossRef] [Green Version]
- Rabadi, W.A.; Myler, H.R.; Weeks, A.R. Iterative multiresolution algorithm for image reconstruction from the magnitude of its Fourier transform. Opt. Eng. 1996, 35, 1015–1025. [Google Scholar] [CrossRef]
- Gerchberg, R.W. A practical algorithm for the determination of phase from image and diffraction plane pictures. Optik 1972, 35, 237–246. [Google Scholar]
- Fienup, J.R. Iterative method applied to image reconstruction and to computer-generated holograms. Opt. Eng. 1980, 19, 193297. [Google Scholar] [CrossRef]
- Zhang, H.; Liang, Y. Reshaped wirtinger flow for solving quadratic system of equations. arXiv 2016, arXiv:1605.07719. [Google Scholar]
- Romano, Y.; Elad, M.; Milanfar, P. The little engine that could: Regularization by denoising (RED). SIAM J. Imaging Sci. 2017, 10, 1804–1844. [Google Scholar] [CrossRef]
- Metzler, C.A.; Schniter, P.; Veeraraghavan, A.; Baraniuk, R.G. PrDeep: Robust Phase Retrieval with Flexible Deep Neural Networks. arXiv 2018, arXiv:1803.00212. [Google Scholar]
- Yeh, L.; Dong, J.; Zhong, J.; Tian, L.; Chen, M.; Tang, G.; Soltanolkotabi, M.; Waller, L. Experimental robustness of fourier ptychography phase retrieval algorithms. Opt. Express 2015, 23, 33214–33240. [Google Scholar] [CrossRef] [PubMed]
- Osherovich, E.; Michael, Z.; Irad, Y. Signal Reconstruction from the Modulus of its Fourier Transform; No. CS Technion Report CS-2009-09; Computer Science Department: Technion, Haifa, Israel, 2009. [Google Scholar]
- Jagatap, G.; Chen, Z.; Hegde, C.; Vaswani, N. Sub-diffraction Imaging using Fourier Ptychography and Structured Sparsity. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018. [Google Scholar]
- Candes, E.J.; Li, X.; Soltanolkotabi, M. Phase retrieval from coded diffraction patterns. Appl. Comput. Harmon. A 2015, 39, 277–299. [Google Scholar] [CrossRef]
- Bian, L.; Suo, J.; Zheng, G.; Guo, K.; Chen, F.; Dai, Q. Fourier ptychographic reconstruction using Wirtinger flow optimization. Opt. Express 2015, 23, 4856–4866. [Google Scholar] [CrossRef] [PubMed]
- Bian, L.; Suo, J.; Chung, J.; Ou, X.; Yang, C.; Chen, F.; Dai, Q. Fourier ptychographic reconstruction using Poisson maximum likelihood and truncated Wirtinger gradient. Sci. Rep. 2017, 6, 27384. [Google Scholar] [CrossRef]
- Heide, F.; Diamond, S.; Niener, M.; Ragan-Kelley, J.; Heidrich, W.; Wetzstein, G. Proximal: Efficient image optimization using proximal algorithms. ACM Trans. Graph. 2016, 35, 84. [Google Scholar] [CrossRef]
- Bunk, O.; Dierolf, M.; Kynde, S.; Johnson, I.; Marti, O.; Pfeiffer, F. Influence of the overlap parameter on the convergence of the ptychographical iterative engine. Ultramicroscopy 2008, 108, 481–487. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Images | Random | Spectral | HIO 2 Results | |||
|---|---|---|---|---|---|---|
| SSIM | Iteration | SSIM | Iteration | SSIM | Iteration | |
| ‘WORLD’ | 0.730 | 180 | 0.404 | 200 | 0.742 | 60 |
| ‘258’ | 0.748 | 250 | 0.492 | 500 | 0.743 | 40 |
| ‘Smile’ | 0.670 | 450 | 0.749 | 250 | 0.792 | 50 |
| ‘Star’ | 0.672 | 230 | 0.624 | 150 | 0.694 | 35 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wen, D.; Song, Z.; Jiang, T.; Zhang, W.; Liu, G.; Wei, X. Imaging Correlography Using Ptychography. Appl. Sci. 2019, 9, 4377. https://doi.org/10.3390/app9204377
Li Z, Wen D, Song Z, Jiang T, Zhang W, Liu G, Wei X. Imaging Correlography Using Ptychography. Applied Sciences. 2019; 9(20):4377. https://doi.org/10.3390/app9204377
Chicago/Turabian StyleLi, Zhixin, Desheng Wen, Zongxi Song, Tuochi Jiang, Weikang Zhang, Gang Liu, and Xin Wei. 2019. "Imaging Correlography Using Ptychography" Applied Sciences 9, no. 20: 4377. https://doi.org/10.3390/app9204377
APA StyleLi, Z., Wen, D., Song, Z., Jiang, T., Zhang, W., Liu, G., & Wei, X. (2019). Imaging Correlography Using Ptychography. Applied Sciences, 9(20), 4377. https://doi.org/10.3390/app9204377