Lateral Stability of a Mobile Robot Utilizing an Active Adjustable Suspension


Abstract
:Featured Application
Abstract
1. Introduction
2. Mobile Robot with Active Suspension
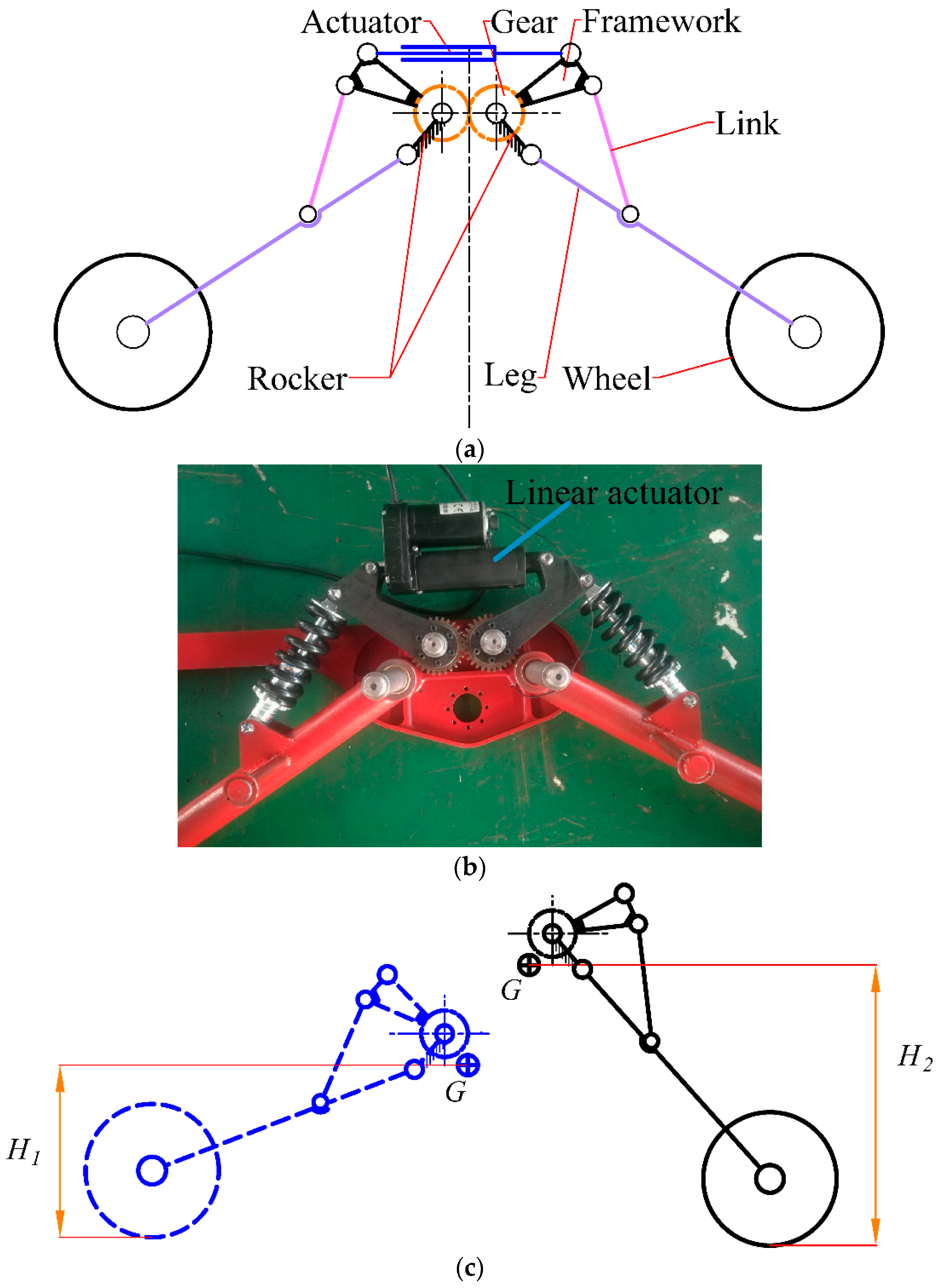
2.1. Concept of the Active Suspension
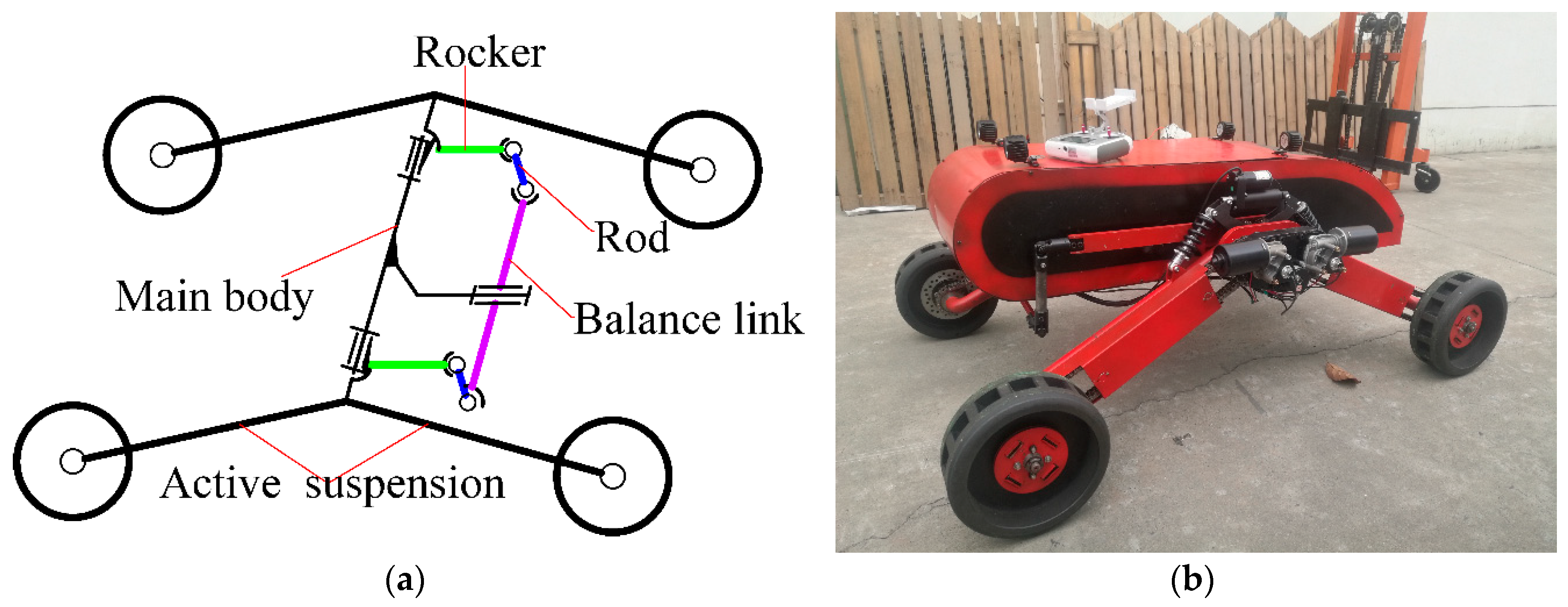
2.2. Mobile Robot with Active Suspension
3. Active Suspension’s Model
3.1. Parameters Design
3.2. Relationship between Input and Output
4. Lateral Stability
- The robot is equipped with four rigid wheels, driven independently.
- The steering angle of each wheel is fixed at 0.
- The robot travels along a flat side slope.
- The traversing speed is low, and the motion of the robot remains in a steady state.
4.1. Corridinate Systems
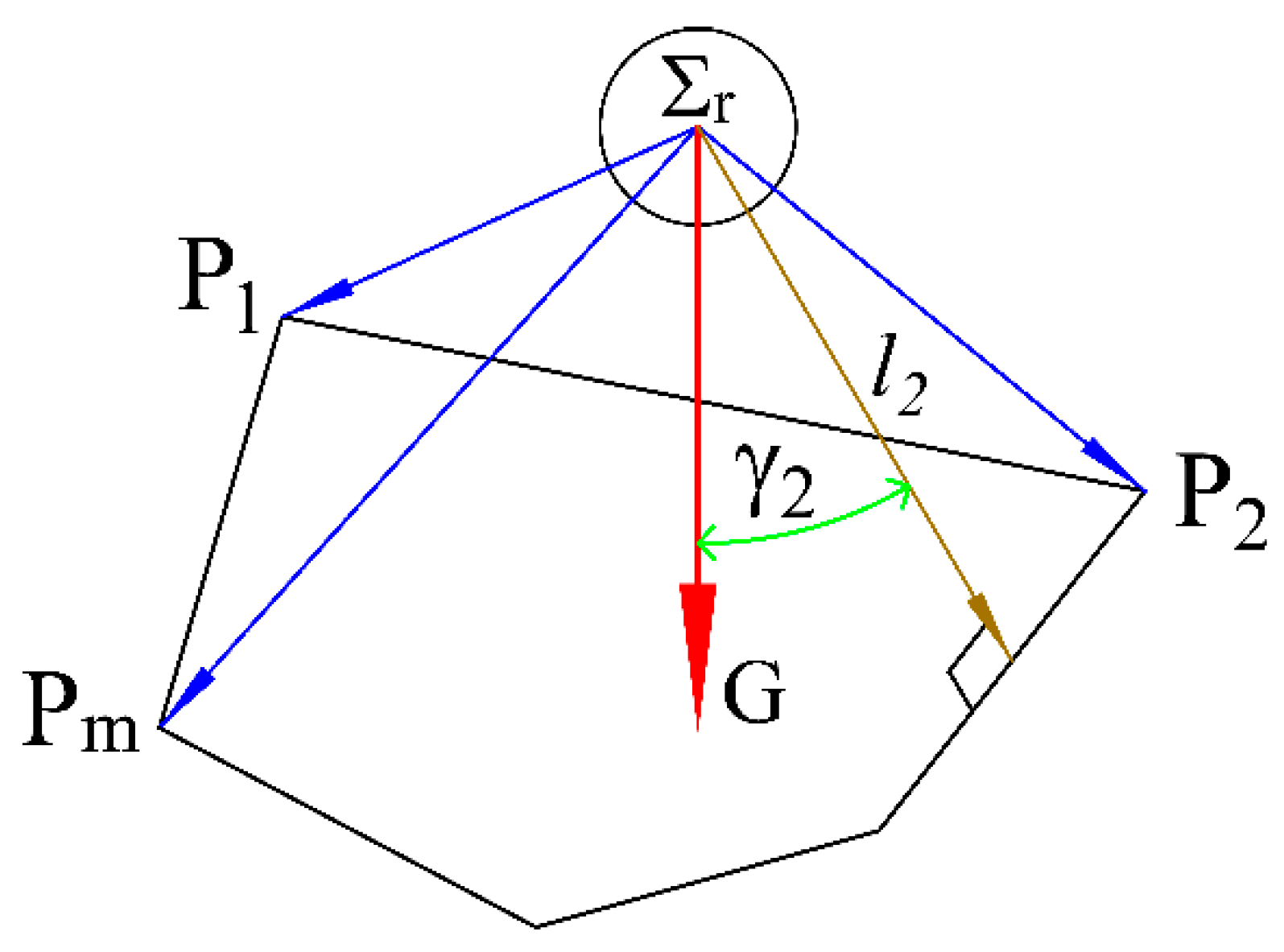
4.2. Define of Lateral Stability Parameters
4.3. Mechanical Model of a Reconfigurable Mobile Robot
5. Case Studies
5.1. Case Study of the Active Suspension
5.2. Case Study for Lateral Stability
- When , both the height of COG (center of gravity) and the ground clearance are lower than the initial condition.
- When , both the height of COG (center of gravity) and the ground clearance are higher than the initial condition.
- When , the roll angle of the mobile robot is actively adjusted to enhance the stability of the mobile robot.
5.2.1. Inputs of Uphill and Downhill Sides are Equal
5.2.2. Inputs of Uphill and Downhill Sides are Unequal
5.2.3. Leveled Configuration
5.2.4. Discussion
6. Manufacture and Test of a Prototype
7. Conclusions
- (1)
- The ground clearance can be changed by the active suspension, and the robot is most stable at its lowest ground clearance. The height of the COG increases with the input of the active suspension (linear actuator length). When the linear actuator length varies from 170 to 220 mm, the height of the COG changes from 453 to 650 mm.
- (2)
- With an active suspension, the robot’s configuration can enhance lateral stability by changing the linear actuator lengths on both sides. When the robot is at its lowest ground clearance, the lateral stability criteria increases by expending the linear actuator on the downhill side. Thus, the robot can increase its lateral stability under different ground clearances. In addition, the robot can level itself when the angle of the side slope is less than 12.33°, and leveled posture can be considered as an appropriate configuration to enable the robot and its tools to work smoothly. Thus, the robot can be applied to agriculture, especially in hilly and mountainous terrains.
- (3)
- The mathematical model represents the relationship between the input (linear actuator lengths on both sides) and the output (stability), providing a theoretical basis for the design and control for mobile robots.
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proof of the Relationship between and in the Active Suspension
References
- Bruzzone, L.; Quaglia, G. Locomotion systems for ground mobile robots in unstructured environments. Mech. Sci. 2012, 3, 49–62. [Google Scholar] [CrossRef]
- Tarokh, M.; Ho, H.D.; Bouloubasis, A. Systematic kinematics analysis and balance control of high mobility rovers over rough terrain. Robot. Auton. Syst. 2013, 61, 13–24. [Google Scholar] [CrossRef]
- Luo, Z.; Shang, J.; Wei, G.; Ren, L. A reconfigurable hybrid wheel-track mobile robot based on Watt II six-bar linkage. Mech. Mach. Theory 2018, 128, 16–32. [Google Scholar] [CrossRef] [Green Version]
- Iagnemma, K.; Rzepniewski, A.; Dubowsky, S.; Schenker, P. Control of robotic vehicles with actively articulated suspensions in rough terrain. Auton. Robot 2003, 14, 5–16. [Google Scholar] [CrossRef]
- Li, Z.; Ma, S.; Li, B.; Wang, M.; Wang, Y. Analysis of the constraint relation between ground and self-adaptive mobile mechanism of a transformable wheel-track robot. Sci. China Technol. Sci. 2011, 54, 610–624. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Fei, Y.; Xu, H. Stability Analysis of a Wheel-Track-Leg Hybrid Mobile Robot. J. Intell. Robot Syst. 2018, 91, 1–14. [Google Scholar] [CrossRef]
- Kim, D.; Hong, H.; Kim, H.S.; Kim, J. Optimal design and kinetic analysis of a stair-climbing mobile robot with rocker-bogie mechanism. Mech. Mach. Theory 2012, 50, 90–108. [Google Scholar] [CrossRef]
- Iagnemma, K.D.; Rzepniewski, A.; Dubowsky, S.; Pirjanian, P.; Huntsberger, T.L.; Schenker, P.S. Mobile robot kinematic reconfigurability for rough terrain. In Sensor Fusion and Decentralized Control in Robotic Systems III. International Society for Optics and Photonics; Boston, M.A., Ed.; SPIE: Bellingham, WA, USA, 2000; Volume 4196, pp. 413–421. [Google Scholar] [CrossRef]
- Wettergreen, D.; Moreland, S.; Skonieczny, K.; Jonak, D.; Kohanbash, D.; Teza, J. Design and field experimentation of a prototype lunar prospector. Int. J. Robot Res. 2010, 29, 1550–1564. [Google Scholar] [CrossRef]
- Wilcox, B.H.; Litwin, T.; Biesiadecki, J.; Matthews, J.; Heverly, M.; Morrison, J.; Townsend, J.; Ahmad, N.; Sirota, A.; Cooper, B. ATHLETE: A cargo handling and manipulation robot for the moon. J. Field. Robot 2007, 24, 421–434. [Google Scholar] [CrossRef]
- Aoki, T.; Murayama, Y.; Hirose, S. Development of a Transformable Three-wheeled Lunar Rover: Tri-Star IV. J. Field Robot 2014, 31, 206–223. [Google Scholar] [CrossRef]
- Cordes, F.; Dettmann, A.; Kirchner, F. Locomotion modes for a hybrid wheeled-leg planetary rover. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO), Karon Beach, Phuket, Thailand, 7–11 December 2011; pp. 2586–2592. [Google Scholar] [CrossRef]
- Halme, A.; Leppänen, I.; Salmi, S.; Ylönen, S. Hybrid locomotion of a wheel-legged machine. In Proceedings of the 3rd International Conference on Climbing and Walking Robots (CLAWAR’00), Madrid, Spain, 2–4 October 2000. [Google Scholar]
- Michaud, F.; Létourneau, D.; Arsenault, M.; Bergeron, Y.; Cadrin, R.; Gagnon, F.; Legault, M.-A.; Millette, M.; Pare, J.-F.; Tremblay, M.-C.; et al. AZIMUT, a leg-track-wheel robot. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas, NV, USA, 27–31 October 2003; pp. 2553–2558. [Google Scholar] [CrossRef]
- Edwin, L.E.; Denhart, J.D.; Gemmer, T.R.; Ferguson, S.M.; Mazzoleni, A.P. Performance Analysis and Technical Feasibility Assessment of a Transforming Roving-Rolling Explorer Rover for Mars Exploration. J. Mech. Des. 2014, 136, 071010. [Google Scholar] [CrossRef]
- Edwin, L.; Mazzoleni, A.; Gemmer, T.; Ferguson, S. Modeling, construction and experimental validation of actuated rolling dynamics of the cylindrical Transforming Roving-Rolling Explorer (TRREx). Acta Astronaut. 2017, 132, 43–53. [Google Scholar] [CrossRef]
- Grand, C.; Benamar, F.; Plumet, F.; Bidaud, P. Stability and traction optimization of a reconfigurable wheel-legged robot. Int. J. Robot Res 2004, 23, 1041–1058. [Google Scholar] [CrossRef]
- Zheng, J.; Gao, H.; Yuan, B.; Liu, Z.; Yu, H.; Ding, L.; Deng, Z. Design and terramechanics analysis of a Mars rover utilising active suspension. Mech. Mach. Theory 2018, 128, 125–149. [Google Scholar] [CrossRef]
- Besseron, G.; Grand, C.; Amar, F.B.; Bidaud, P. Decoupled control of the high mobility robot hylos based on a dynamic stability margin. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2435–2440. [Google Scholar] [CrossRef]
- Kubota, T.; Naiki, T. Novel mobility system with active suspension for planetary surface exploration. In Proceedings of the 2011 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; pp. 1–9. [Google Scholar] [CrossRef]
- Chen, F.; Genta, G. Dynamic modeling of wheeled planetary rovers: A model based on the pseudo-coordiates approach. Acta Astronaut. 2012, 81, 288–305. [Google Scholar] [CrossRef]
- Inotsume, H.; Sutoh, M.; Nagaoka, K.; Nagatani, K.; Yoshida, K. Modeling, analysis, and control of an actively reconfigurable planetary rover for traversing slopes covered with loose soil. J. Field Robot 2013, 30, 875–896. [Google Scholar] [CrossRef]
- Inotsume, H.; Sutoh, M.; Nagaoka, K.; Nagatani, K.; Yoshida, K. Slope traversability analysis of reconfigurable planetary rovers. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 4470–4476. [Google Scholar] [CrossRef]
- Gao, Q.M.; Gao, F.; Zhou, W.H. Stability analysis of hilly power platform with balance rocker suspension. Trans. CSAM 2013, 44, 291–293. [Google Scholar]
- Gao, Q.; Gao, F.; Tian, L.; Li, L.; Ding, N.; Xu, G.; Jiang, D. Design and development of a variable ground clearance, variable wheel track self-leveling hillside vehicle power chassis (V2-HVPC). J. Terramech. 2014, 56, 77–90. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, F.; Pan, G.; Liu, H.; Liu, Z.; Zhang, J. Design and Testing of a Small Remote-Control Hillside Tractor. Trans. ASABE 2014, 57, 363–370. [Google Scholar] [CrossRef]
- Jiang, H.; Xu, G.; Zeng, W.; Gao, F. Design and kinematic modeling of a passively-actively transformable mobile robot. Mech. Mach. Theory 2019, 142, 103591. [Google Scholar] [CrossRef]
- Liu, B.; Gao, F.; Jiang, H.; Zhang, B. Attitude control algorithm of balancing-arm mobile robot. J. Beijing Univ. Aeronaut. Astronaut. 2018, 44, 391–398. [Google Scholar] [CrossRef]
- Papadopoulos, E.G.; Rey, D.A. A new measure of tipover stability margin for mobile manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 4, pp. 3111–3116. [Google Scholar] [CrossRef]
- Freitas, G.; Gleizer, G.; Lizarralde, F.; Hsu, L.; dos Reis, N.R.S. Kinematic reconfigurability control for an environmental mobile robot operating in the amazon rain forest. J. Field Robot 2009, 27, 1340–1345. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| 640 | mm | 116.8 | mm | ||
| 160 | mm | 161.1 | mm | ||
| 52.1 | mm | 140.3 | mm | ||
| 58 | mm | 103.1 | mm | ||
| 150 | mm | 20 | mm | ||
| −85.5 | mm | 23.6 | ° | ||
| 16.9 | ° |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 450 | 450 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, H.; Xu, G.; Zeng, W.; Gao, F.; Chong, K. Lateral Stability of a Mobile Robot Utilizing an Active Adjustable Suspension. Appl. Sci. 2019, 9, 4410. https://doi.org/10.3390/app9204410
Jiang H, Xu G, Zeng W, Gao F, Chong K. Lateral Stability of a Mobile Robot Utilizing an Active Adjustable Suspension. Applied Sciences. 2019; 9(20):4410. https://doi.org/10.3390/app9204410
Chicago/Turabian StyleJiang, Hui, Guoyan Xu, Wen Zeng, Feng Gao, and Kun Chong. 2019. "Lateral Stability of a Mobile Robot Utilizing an Active Adjustable Suspension" Applied Sciences 9, no. 20: 4410. https://doi.org/10.3390/app9204410
APA StyleJiang, H., Xu, G., Zeng, W., Gao, F., & Chong, K. (2019). Lateral Stability of a Mobile Robot Utilizing an Active Adjustable Suspension. Applied Sciences, 9(20), 4410. https://doi.org/10.3390/app9204410