A Route Planner Using a Delegate Multi-Agent System for a Modular Manufacturing Line: Proof of Concept


 and
and
Abstract
:Featured Application
Abstract
1. Introduction
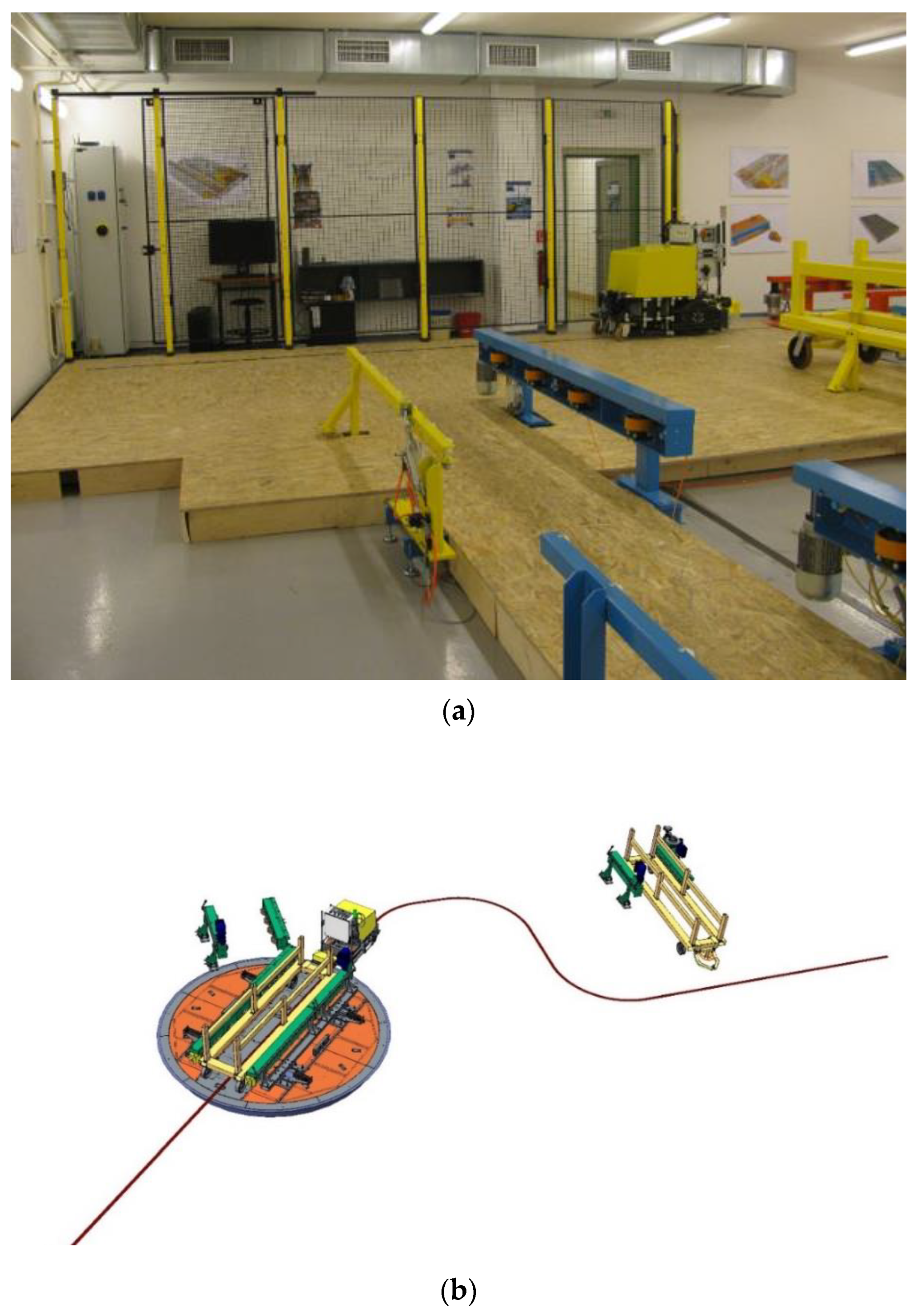
- MRS (mobile robotic system): A bi-directional, real-world hardware prototype capable of transporting parts of an MML. It is bounded by the limited processing capacity and memory and it uses infrared optical sensors that allow it to be guided by a black tape [10].
- MRSA (mobile robotic system agent): A virtual entity mirroring its MRS. It provides transport services for modular platform agents. All decisions and interactions with other agents are made by the MRSA. The final decisions are encoded and sent to its MRS.
- MP (modular platform): A physical part of an MML that is able to connect to (or disconnect from) other modular platforms. It hosts a superstructure that can be a manufacturing or a logistic resource (robotic arm, conveyor, etc.). Superstructures and their agents are beyond the scope of this paper.
- MPA (modular platform agent): Reflects an MP in the virtual environment. It uses the transport services of the MRSA (Figure 1).
- CA (crossroad agent): Provides reservation services for an MRS’s passage through its real-world counterpart.
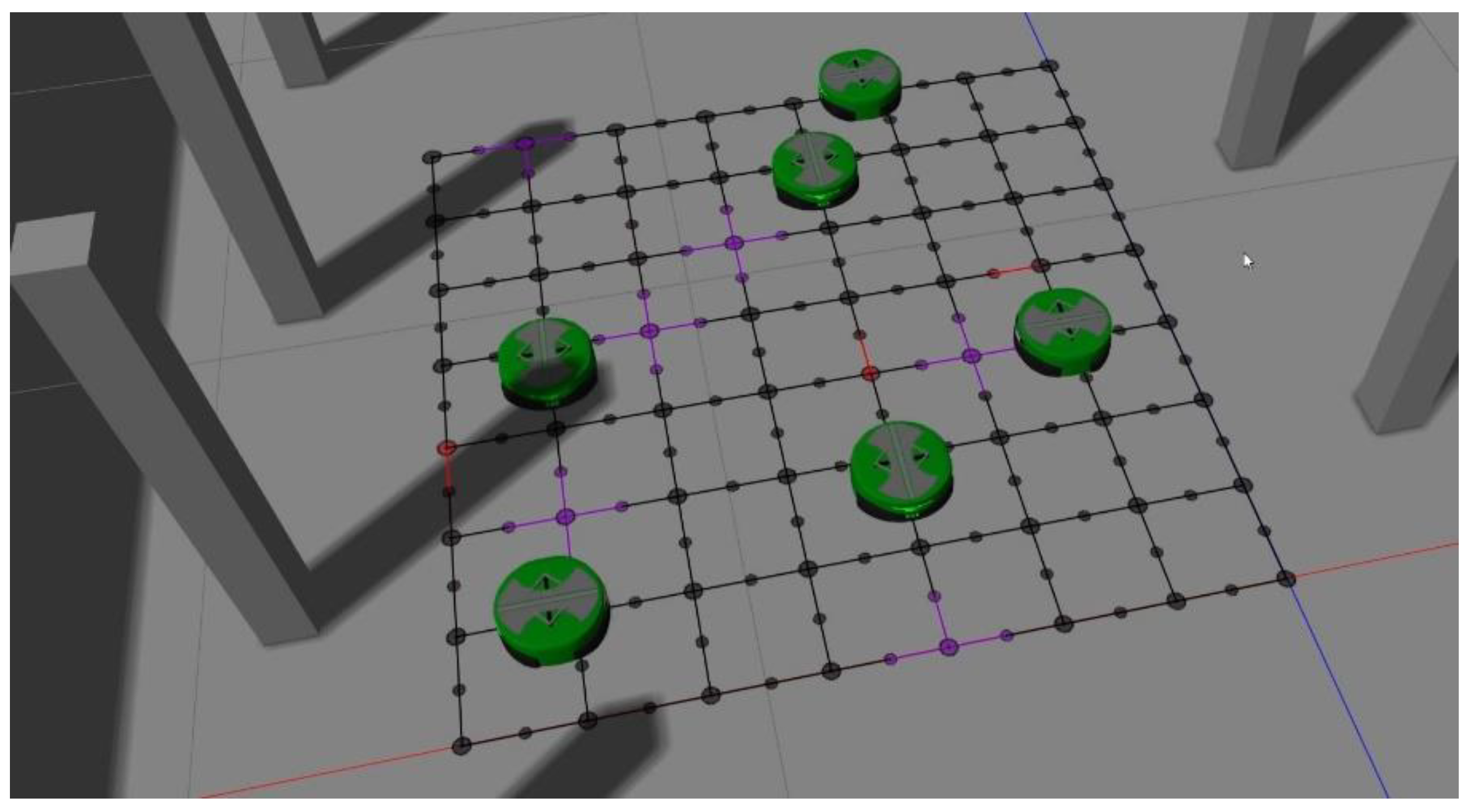
- GG (guidance grid): Composed of all crossroads (Figure 2). Note that the size of the crossroad is about the size of an MPA. This allows an MPA to connect to other MPAs when it is located at the center of a crossroad.
- Production capacities can easily be expanded (by adding more modules);
- The system can respond to fluctuating demand (by removing some modules);
- Re-routing of the material flow is simple;
- Modules that are out of order can easily be replaced;
- Start-up times and costs are reduced;
- The system can be dismantled and relocated to another factory.
Objective, Targets, and Goals
- The planning must be highly urgent, in order to meet the requirements of an MML’s reconfiguration.
- The environment must be highly dynamic due to the possible delays or breakdowns of the hardware prototypes, and adding or removing agents.
- The application requires a continuous planner because new transport orders can be requested at any time.
- An MRS is bounded by the limited processing capacity and memory and it does not possess a sensor for detecting obstacles or other MRSs.
- Movement restrictions resulting from the fact that hardware prototypes physically occupy space.
- The presence of deadlock and live-lock situations.
- R1: deal with the highly urgent, space-constrained application and minimize the processing resources.
- R2: deal with the movement restrictions of MRS and at the same time to be live-lock and deadlock-free.
- R3: cope with the dynamism of the real-world environment (variable velocity of the agents; disturbances, changes, delays, and breakdowns of the agents; and communication failures)
- R4: minimize unnecessarily traveled distances and the travel times of the MRSs, and to maximize the throughput of the GG.
- R5: be scalable and leave room for further improvements and changes.
2. Materials and Methods
2.1. Delegate-MASs
- Feasibility ants;
- Exploration ants;
- Intention ants.
2.2. Design Method
2.3. Graph Structured Network (GSN)
- Virtual;
- Physical;
- Logical.
2.4. MRSAs and CAs as the Primary Agents
- A: Starting activation. At the beginning of the simulation or after the addition of an MRSA to the virtual reality, an MRSA activates the reservation of the crossroads it resides on.
- B: “Hit the road” activation. Just before an MRSA leaves its first crossroad, it tries to activate the reservation at the second crossroad of its route.
- C: Forward activation. If moving, an MRSA will continue straight ahead after the next crossroad (i.e., it is not stopping or turning); it tries to activate the reservation of the crossroad that is the second one in the order. This activation is performed on a virtual node.
- D: Turning activation. If the moving MRSA will turn (left or right) at the next crossroad, it tries to activate the reservation of a crossroad that is the second in the order. In that case, the activation is performed after the turning.
2.5. Ants
2.5.1. Feasibility D-MAS
2.5.2. Exploration D-MAS
- Start and stop;
- Continue and continue;
- Start and continue;
- Continue and stop.
- Turn right;
- Turn left;
- Switch direction;
- Emergency stop.
2.5.3. Intention D-MAS
3. Results
A Proof-of-Concept Implementation
4. Discussion
5. Conclusions
- To deal with a highly urgent, space-constrained application, and minimize processing resources;
- To deal with the movement restrictions of MRS, and at the same time, to be live-lock and deadlock-free;
- To cope with the dynamism of real-world environments (variable velocity of the agents; disturbances, changes, delays, and breakdowns of the agents; and communication failure);
- To minimize unnecessarily traveled distances and the travel times of the MRSs, and to maximize the throughput of the GG;
- To be scalable and leave room for further improvements and changes.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BST | Binary Search Tree |
| CA | Crossroad Agent |
| D-MAS | Delegate MAS |
| EA | Exploration Ant |
| ESP | Ella Software Platform |
| FA | Feasibility Ant |
| FI | Feasibility information |
| FIIP | Forced Infinity Intention Pheromone |
| GG | Guidance Grid |
| GSN | Graph Structure Network |
| IA | Intention Ant |
| IIP | Infinity Intention Pheromone |
| IP | Intention Pheromone |
| MAS | Multi-Agent System |
| MML | Modular Manufacturing Line |
| MP | Modular Platform |
| MPA | Modular Platform Agent |
| MRS | Mobile Robotic System |
| MRSA | Mobile Robotic System Agent |
| NRA | Approach Without Reservations |
| PhC | Pheromone Container |
| PsRC | Pairs of Road signs and Costs |
| RA | Resource Agent |
| TA | Task Agent |
| WRA | Approach With Reservations |
References
- Haluska, M.; Gregor, M. Concept of the system for design and optimization of configurations in new generation of manufacturing systems. Int. J. Manag. Soc. Sci. Res. Rev. 2016, 1, 181–184. [Google Scholar]
- Micieta, B.; Markovic, J.; Binasova, V. Advances in sustainable energy efficient manufacturing systém. MM Sci. 2016, 2016, 918–926. [Google Scholar] [CrossRef]
- Wooldridge, M.J. An Introduction to Multiagent Systems, 2nd ed.; John Wiley Sons: Chichester, UK, 2009. [Google Scholar]
- Leitao, P.; Karnouskos, S.; Ribeiro, L.; Lee, J.; Strasser, T.; Colombo, A.W. Smart Agents in Industrial Cyber–Physical Systems. Proc. IEEE 2016, 104, 1086–1101. [Google Scholar] [CrossRef]
- Suzuki, J.; Suda, T. Design and Implementation of a Scalable Infrastructure for Autonomous Adaptive Agents. In Proceedings of the 15th 1asted Internacional Conference Parallel and Distributed Computing and Systems, Marina Del Rey, CA, USA, 3–5 November 2003. [Google Scholar]
- Karnouskos, S.; Leitao, P. Key Contributing Factors to the Acceptance of Agents in Industrial Environments. IEEE Trans. Ind. Inf. 2017, 13, 696–703. [Google Scholar] [CrossRef]
- Dinh, H.T.; van Lon, R.; Holvoet, T. Multi-agent route planning using delegate mas. In Workshop on Distributed and Multi-Agent Planning; London, UK, 2016; pp. 24–32. [Google Scholar]
- Huard, E.; Gorissen, D.; Holvoet, T. Applying Delegate Multi-Agent Systems in a Traffic Control System CW ReportsCW Reports; Katholieke Universiteit Leuven: Leuven, Belgium, 2006. [Google Scholar]
- Holvoet, T.; Valckenaers, P. Exploiting the Environment for Coordinating Agent Intentions. In Environments for Multi-Agent Systems III; Weyns, D., Parunak, H.V.D., Michel, F., Eds.; Springer: Berlin/Heidelberg, Berlin, 2007; Volume 4389, pp. 51–66. [Google Scholar] [CrossRef]
- Patka, J.; Gregor, T.; Gregor, M. The architecture of smart connected mobile robotic systems. In Invent 2016: Industrial Engineering-toward the Smart Industry; University of Zilina: Žilina, Slovakia; EDIS: London, UK, 2016; Volume 11, pp. 132–135. [Google Scholar]
- van Lon, R.R.S.; Holvoet, T. When Do Agents Outperform Centralized Algorithms? A Systematic Empirical Evaluation in Logistics. Auton. Agent. Multi-Agent Syst. 2017, 31, 1578–1609. [Google Scholar] [CrossRef]
- Philips, J.; Valckenaers, P.; Bruyninckx, H.; Van Brussel, H. Scalable and Robust Coordination of Multiple Mobile Robots Using PROSA and Delegate MAS. In Proceedings of the International Symposium on Robotics (ISR), Taipei, Taiwan, 29–31 August 2012; pp. 527–532. [Google Scholar]
- Rutten, L.; Valckenaers, P. Self-Organizing Prediction in Smart Grids through Delegate Multi-Agent Systems. In Trends in Practical Applications of Agents and Multiagent Systems; Pérez, J.B., Rodríguez, J.M.C., Fähndrich, J., Mathieu, P., Campbell, A., Suarez-Figueroa, M.C., Ortega, A., Adam, E., Navarro, E., Hermoso, R., et al., Eds.; Springer International Publishing: Cham, Swtherland, 2013; Volume 221, pp. 95–102. [Google Scholar]
- Silver, D. Cooperative Pathfinding. In Proceedings of the AIIDE’05 First AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment, Marina Del Rey, CA, USA, 1–3 June 2005; pp. 117–122. [Google Scholar]
- Vavrík, V.; Gregor, M.; Grznár, P. Optimalizačné metódy vyvažovania. In Proceedings of the InvEnt 2018: Industrial Engineering-Invention for Enterprise 2nd Edition-Žilina CEIT Stredoeurópsky technologický inštitút, Banka Žilina, Žilina, Slovakia, 14–15 June 2018; pp. 132–135, ISBN 978-80-89865-07-9. [Google Scholar]
- Holvoet, T.; Weyns, D.; Valckenaers, P. Patterns of Delegate MAS. In Proceedings of the 2009 Third IEEE International Conference on Self-Adaptive and Self-Organizing Systems, San Francisco, CA, USA, 14–18 September 2009; IEEE: San Francisco, CA, USA, 2009; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Belle, J.V.; Germain, B.S.; Philips, J.; Valckenaers, P.; Cattrysse, D. Cooperation between a Holonic Logistics Execution System and a Vehicle Routing Scheduling System. IFAC Proc. Vol. 2013, 46, 41–46. [Google Scholar] [CrossRef]
- Van Belle, J. A Holonic Logistics Execution System for Cross-docking (een holonisch logistiek uitvoeringssysteem voor cross-docking); KU Leuven: Leuven, Belgium, 2013; ISBN 978-94-6018-749-0. [Google Scholar]
- Verstraete, P.; Valckenaers, P.; Van Brussel, H.; Saint Germain, B.; Hadeli, K.; Van Belle, J. Towards Robust and Efficient Planning Execution. Eng. Appl. Artif. Intell. 2008, 21, 304–314. [Google Scholar] [CrossRef]
- Holvoet, T.; Weyns, D.; Valckenaers, P. Delegate MAS Patterns for Large-Scale Distributed Coordination and Control Applications. In Proceedings of the 15th European Conference on Pattern Languages of Programs-EuroPLoP ’10; ACM Press: Irsee, Germany, 2010; p. 1. [Google Scholar] [CrossRef]
- Weyns, D.; Holvoet, T.; Helleboogh, A. Anticipatory Vehicle Routing Using Delegate Multi-Agent Systems. In 2007 IEEE Intelligent Transportation Systems Conference; IEEE: Bellevue, WA, USA, 2007; pp. 87–93. [Google Scholar] [CrossRef]
- Philips, J.; Germain, B.S.; Van Belle, J.; Valckenaers, P. Computational Complexity and Scalability Analysis of PROSA and Delegate MAS. IFAC Proc. Vol. 2013, 46, 29–34. [Google Scholar] [CrossRef]
- Holvoet, T.; Valckenaers, P. Beliefs, Desires and Intentions through the Environment. In Proceedings of the fifth International Joint Conference on Autonomous Agents and Multiagent Systems -AAMAS ’06, Hakodate, Japan, 8–12 May 2006; ACM Press: Hakodate, Japan, 2006; p. 1052. [Google Scholar] [CrossRef]
- Hadeli Valckenaers, P.; Van Brussel, H.; Verstraete, P.; Germain, B.S.; Van Belle, J. Production Planning and control in bio-inspired holonic manufacturing execution systems. IFAC Proc. Vol. 2007, 40, 42–49. [Google Scholar] [CrossRef]
- Van Dyke Parunak, H.; Brueckner, S.; Weyns, D.; Holvoet, T.; Verstraete, P.; Valckenaers, P.E. Pluribus Unum: Polyagent and Delegate MAS Architectures. In Multi-Agent-Based Simulation VIII; Antunes, L., Paolucci, M., Norling, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 5003, pp. 36–51. [Google Scholar] [CrossRef]
- Valckenaers, P.; Saint Germain, B.; Verstraete, P.; Van Brussel, H. MAS Coordination and Control Based on Stigmergy. Comput. Ind. 2007, 58, 621–629. [Google Scholar] [CrossRef]
- Claes, R.; Holvoet, T. Maintaining a distributed symbiotic relationship using delegate multiagent systems. In Proceedings of the 2010 winter, Simulation conference (wsc), Baltimore, MD, USA, 5–8 December 2010; pp. 2981–2990. [Google Scholar]
- Varga, L.Z. A Game Theory Model for Self-Adapting Traffic Flows with Autonomous Navigation. In Autonomic Road Transport Support Systems; McCluskey, T.L., Kotsialos, A., Müller, J.P., Klügl, F., Rana, O., Schumann, R., Eds.; Springer International Publishing: Cham, Swtherlands, 2016; pp. 13–28. [Google Scholar] [CrossRef]
- Vandael, S.; Holvoet, T.; Deconinck, G. A decentralized approach for public fast charging of electric vehicles using delegate multi-agent systems. In Proceedings of the third international workshop on agent technologies for energy systems (ates 2012), Valencia, spain, 4–8 July 2012. [Google Scholar]
- Durica, L.; Hoc, M.; Vavrik, V. Software platform for industrial applications: Ella. In Invent 2017: Industrial Engineering-Invention for Enterprise; Wydawnictwo Fundacji Centrum Nowych Technologii: Szek, Poland, 2017; Volume 12, pp. 32–35. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Action | Time [s] |
|---|---|
| start and stop | 2.0 |
| start and continue | 1.5 |
| continue and continue | 1.0 |
| continue and stop | 1.5 |
| turn right | 1.0 |
| turn left | 1.0 |
| switch direction | 0.0 |
| emergency stop | 2.0 |
| start and stop | 1.5 |
| start and continue | 1.0 |
| FA [s] | EA [s] | IA [s] | |
|---|---|---|---|
| Average time | 0.5553 | 0.2870 | 0.2109 |
| Highest time | 0.7823 | 0.5651 | 0.4998 |
| FA [s] | EA [s] | IA | |
|---|---|---|---|
| Average time | 0.5534 | 0.2652 | N/A |
| Highest time | 0.6998 | 0.4668 | N/A |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ďurica, L.; Gregor, M.; Vavrík, V.; Marschall, M.; Grznár, P.; Mozol, Š. A Route Planner Using a Delegate Multi-Agent System for a Modular Manufacturing Line: Proof of Concept. Appl. Sci. 2019, 9, 4515. https://doi.org/10.3390/app9214515
Ďurica L, Gregor M, Vavrík V, Marschall M, Grznár P, Mozol Š. A Route Planner Using a Delegate Multi-Agent System for a Modular Manufacturing Line: Proof of Concept. Applied Sciences. 2019; 9(21):4515. https://doi.org/10.3390/app9214515
Chicago/Turabian StyleĎurica, Lukáš, Michal Gregor, Vladimír Vavrík, Martin Marschall, Patrik Grznár, and Štefan Mozol. 2019. "A Route Planner Using a Delegate Multi-Agent System for a Modular Manufacturing Line: Proof of Concept" Applied Sciences 9, no. 21: 4515. https://doi.org/10.3390/app9214515
APA StyleĎurica, L., Gregor, M., Vavrík, V., Marschall, M., Grznár, P., & Mozol, Š. (2019). A Route Planner Using a Delegate Multi-Agent System for a Modular Manufacturing Line: Proof of Concept. Applied Sciences, 9(21), 4515. https://doi.org/10.3390/app9214515