A Study on a Mechanism of Lateral Pedestrian-Footbridge Interaction


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
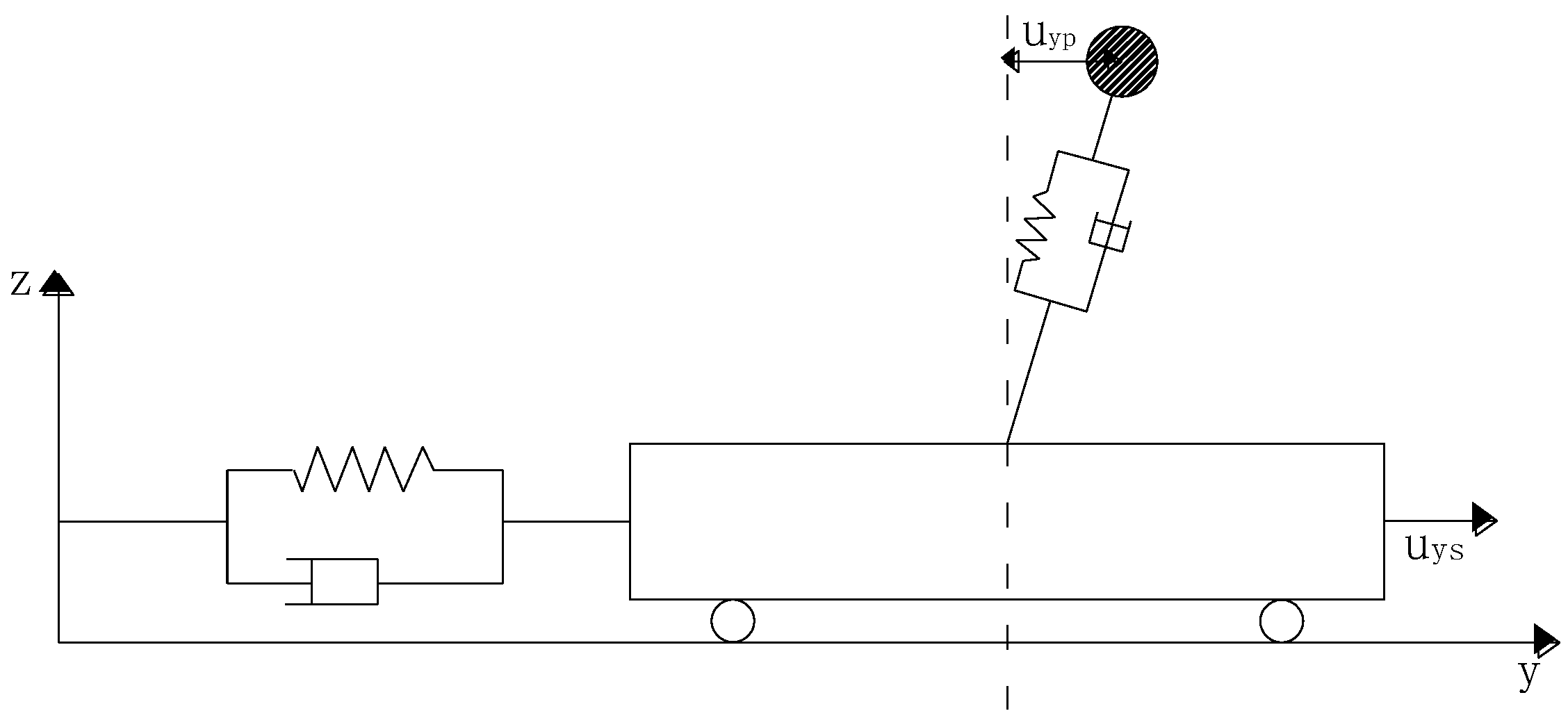
2. A Dynamic Model of Lateral Pedestrian-Footbridge Interaction
3. Study on Dynamic Response of Pedestrian-Footbridge Interactions
3.1. Dynamic Coupling Equation Solution of the Lateral Interaction Pedestrian-Footbridge
3.2. Internal Resonance Analysis of Pedestrian-Footbridge Lateral Coupling System
4. Amplitude Frequency Curve
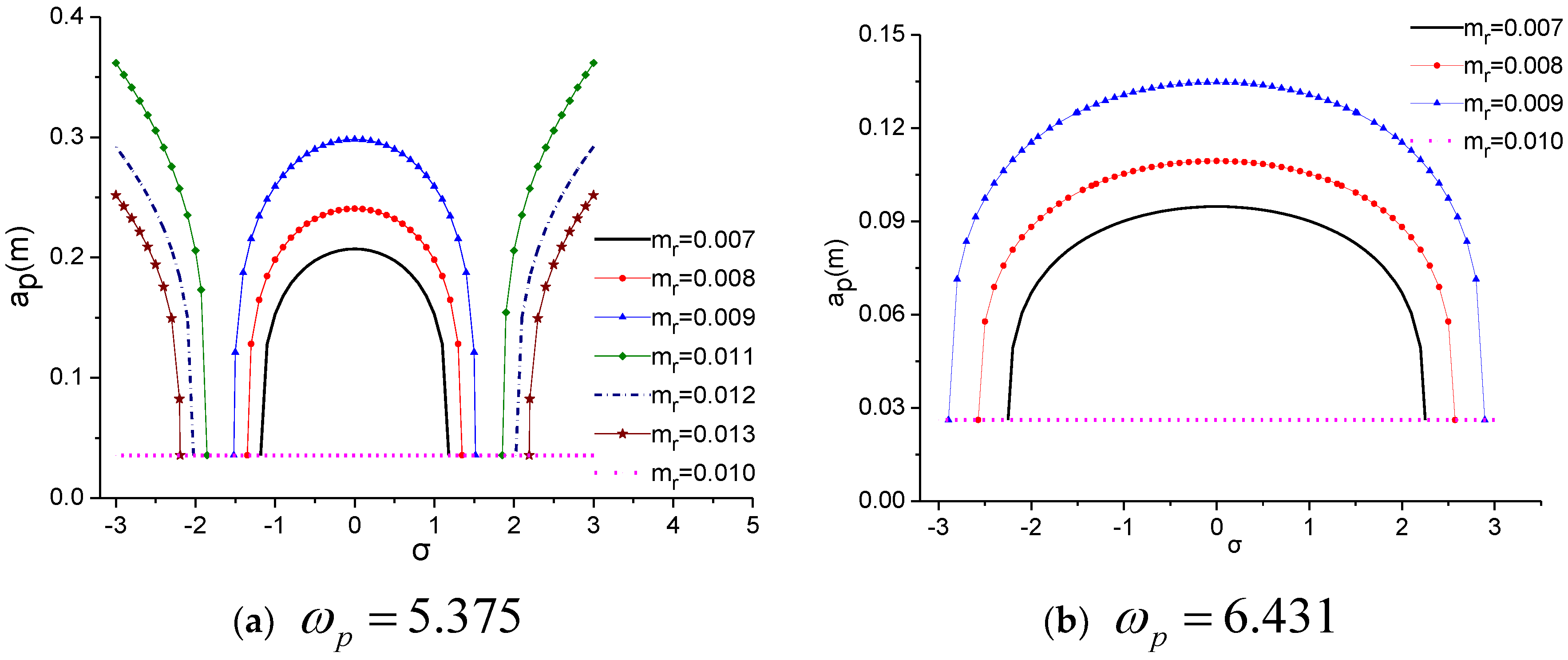
4.1. Amplitude Frequency Curve of Pedestrians
4.2. Amplitude Frequency Curve of Footbridge
5. Study on Pedestrian-Footbridge Lateral Displacement and Lateral Interaction
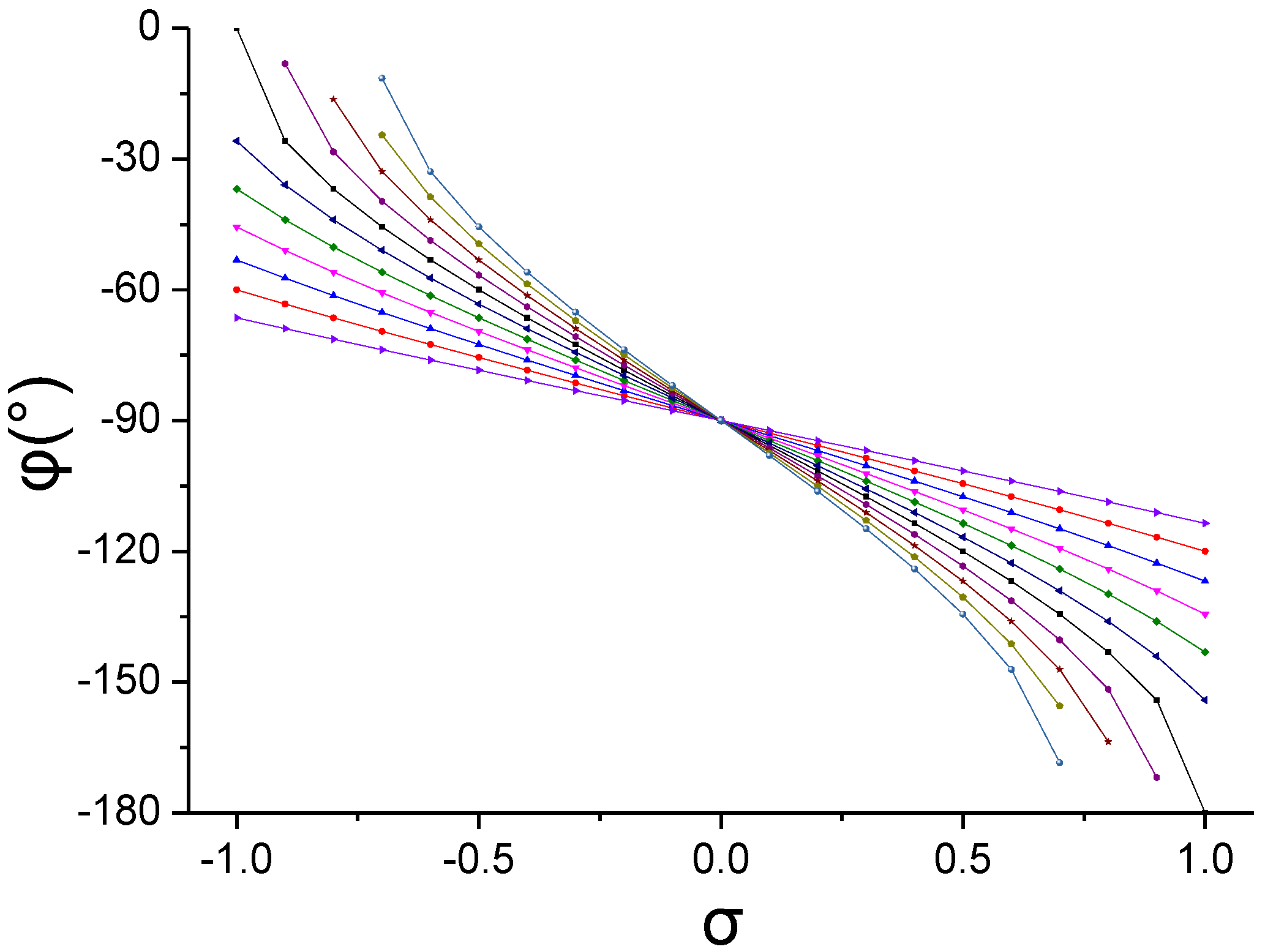
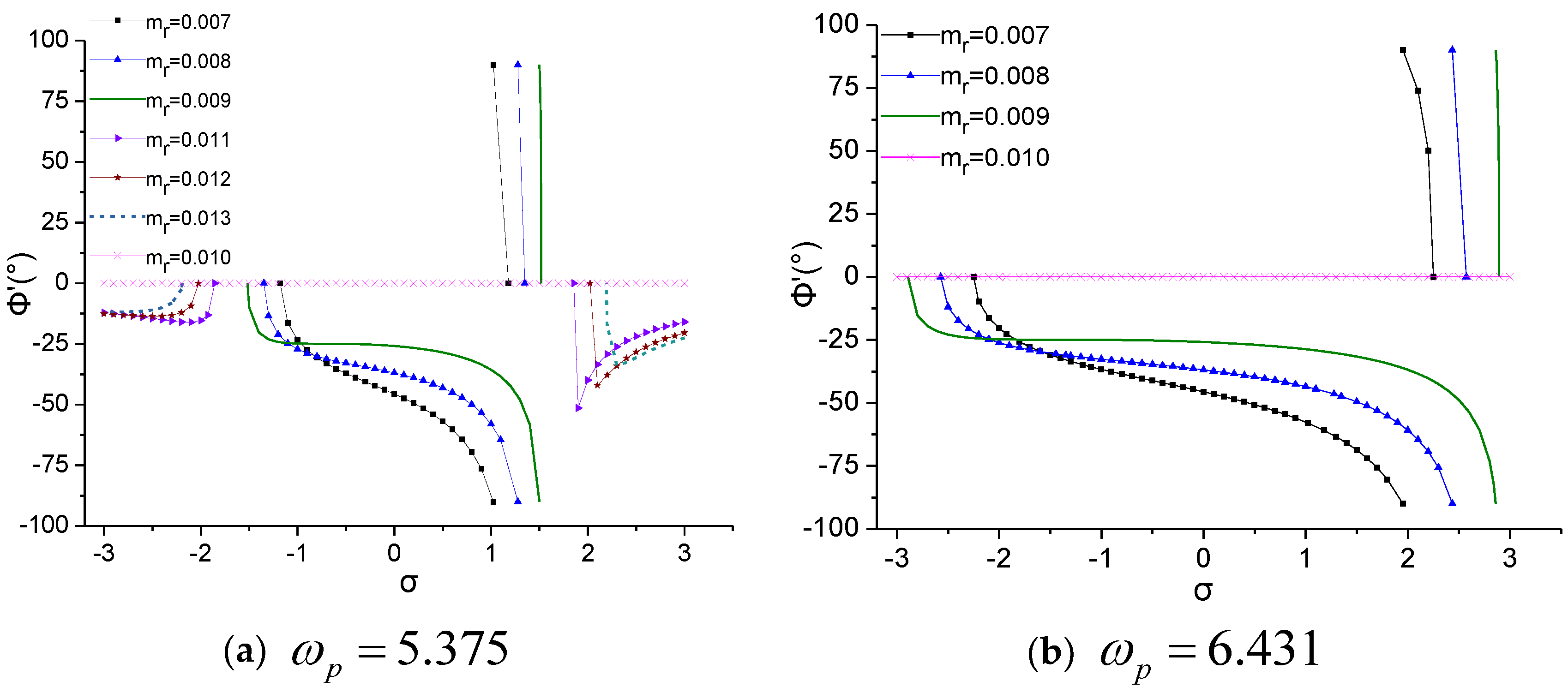
5.1. The Phase Angle between the Lateral Relative Displacement of Pedestrians and Lateral Displacement of the Footbridge
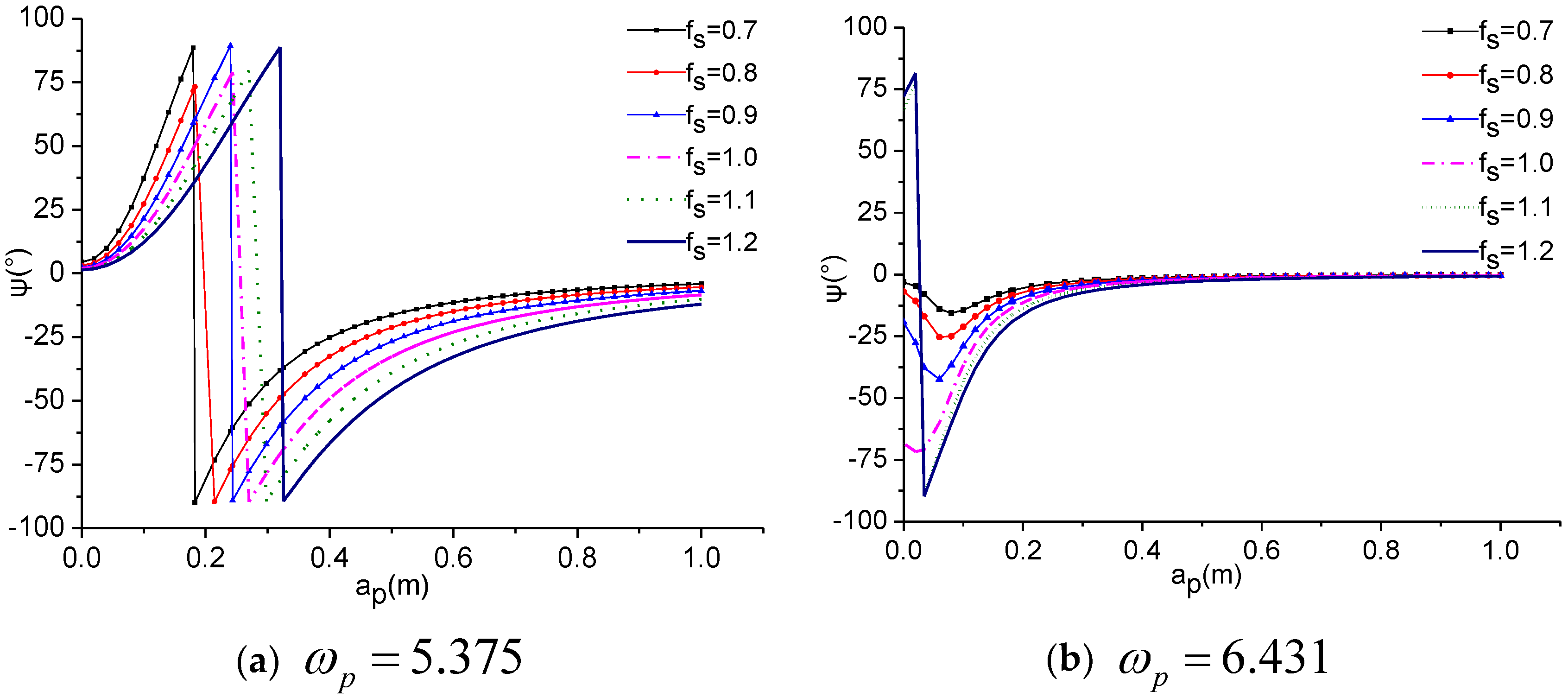
5.2. Phase Angle between the Lateral Absolute Displacement of Pedestrians and the Lateral Displacement of the Footbridge
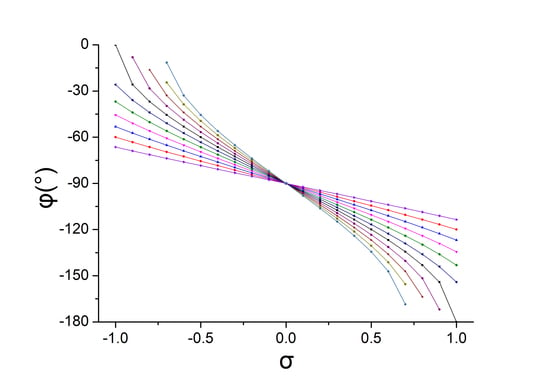
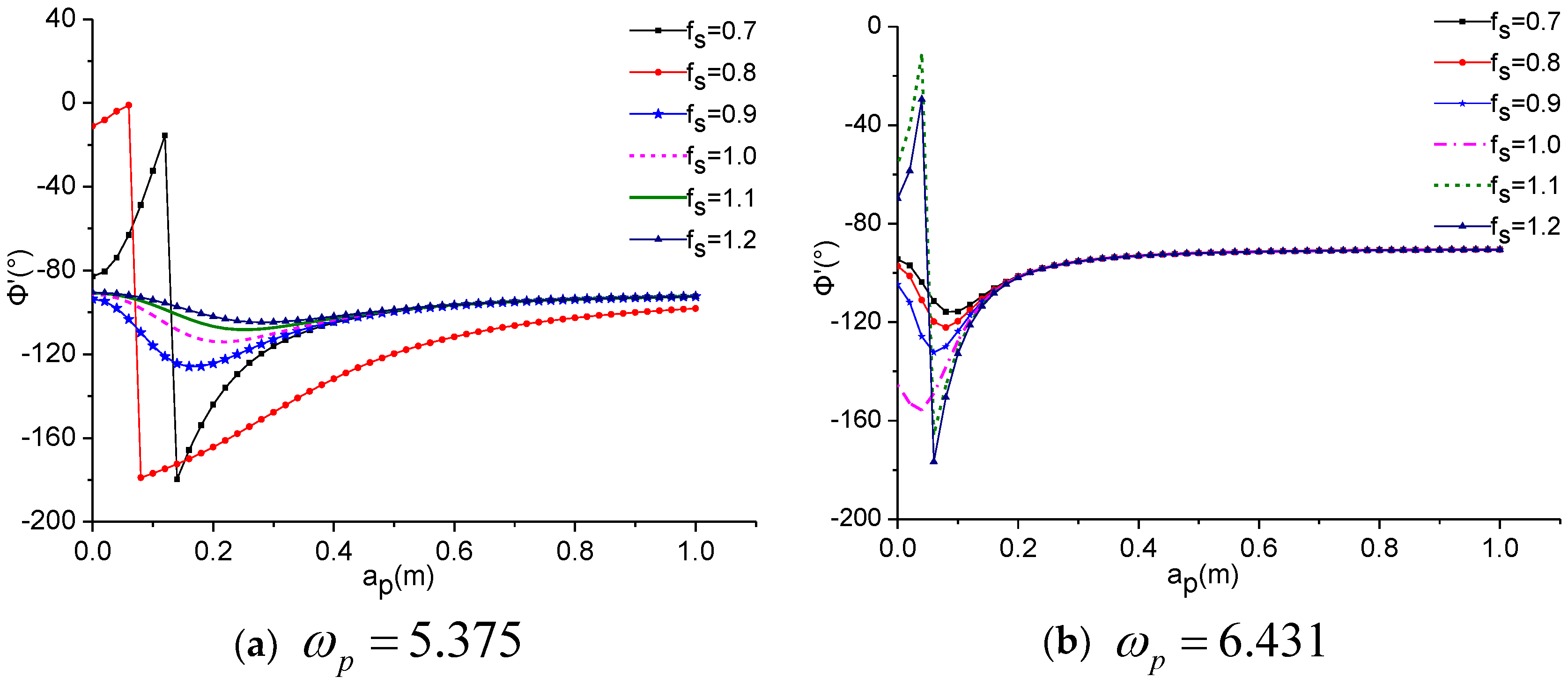
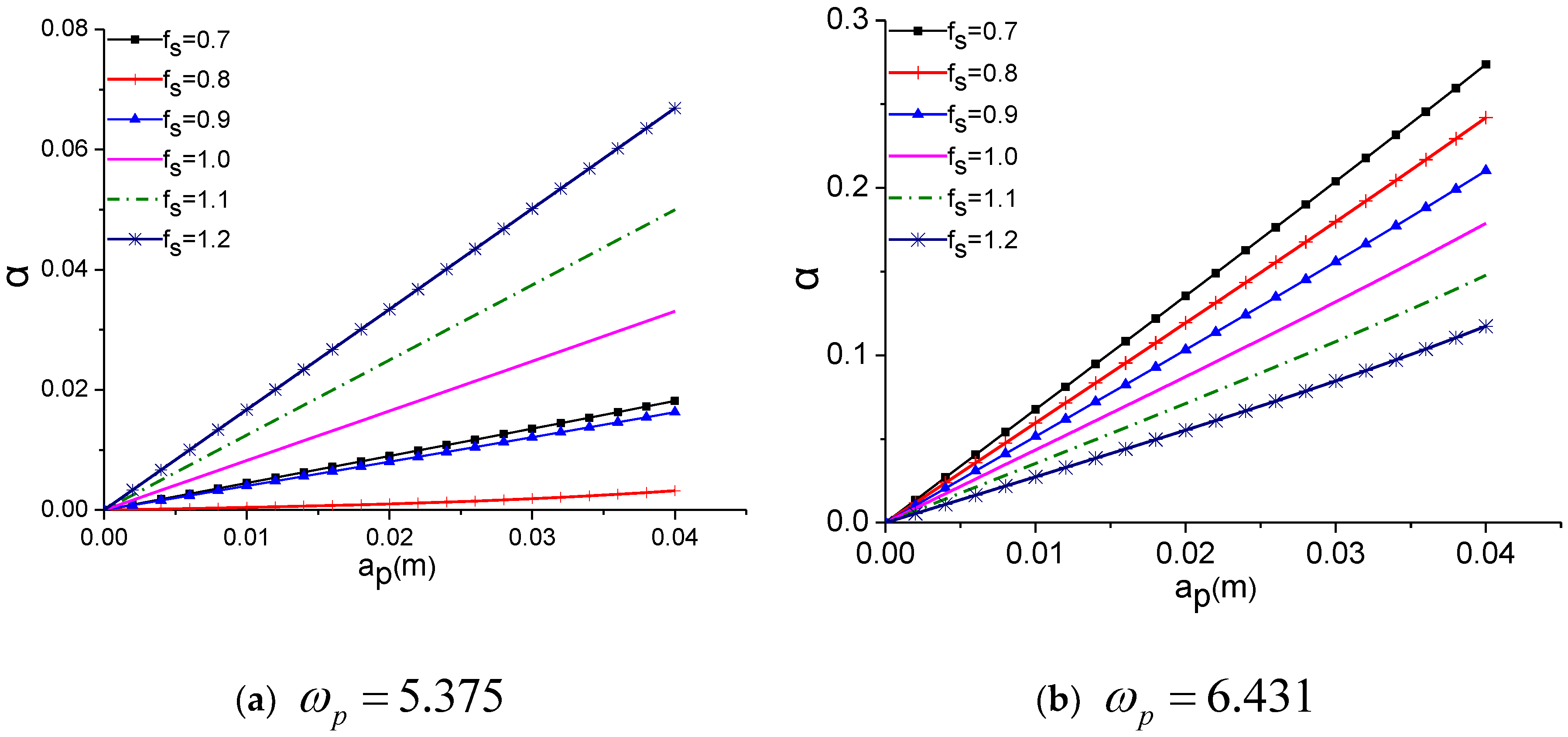
5.3. Phase Angle between Lateral Interaction Force and Lateral Excitation Speed
6. Case Analysis
6.1. Amplitude Frequency Curve
6.2. Phase Frequency Curve
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shahabpoor, E.; Pavic, A.; Racic, V. Identification of mass-spring-damper model of walking humans. Structures 2016, 5, 233–246. [Google Scholar] [CrossRef] [Green Version]
- Lilin, C.; Dong, C.; Guojun, Y. Two Simplified Models for Human-Structure Vertical Interaction. J. Southwest Jiaotong Univ. 2018, 53, 1166–1172. [Google Scholar]
- Hao-xiang, H.; Wei-ming, Y.; Ai-lin, Z.; Zhuo, W. Human-structure dynamic interaction and comfort evaluation in vertical ambient vibration. J. Vib. Eng. 2008, 21, 446–451. [Google Scholar]
- Zhou, C.; Quansheng, Y.; Junliang, H.; Shi-ping, H.; Xiao-lin, Y. Coupling Vibration Investigation and Parameter Analysis of Crowd-Bridge System. J. South China Univ. Technol. (Nat. Sci. Ed.) 2014, 42, 75–83. [Google Scholar]
- Van Nimmen, K.; Lombaert, G.; De Roeck, G.; Van den Broeck, P. The impact of vertical human-structure interaction on the response of footbridges to pedestrian excitation. J. Sound Vib. 2017, 402, 104–121. [Google Scholar] [CrossRef] [Green Version]
- Mulas, M.G.; Lai, E.; Lastrico, G. Coupled analysis of footbridge-pedestrian dynamic interaction. Eng. Struct. 2018, 176, 127–142. [Google Scholar] [CrossRef]
- Li, Q.; Fan, J.; Nie, J.; Li, Q.; Chen, Y. Crowd-induced random vibration of footbridge and vibration control using multiple tuned mass dampers. J. Sound. Vib. 2010, 329, 4068–4092. [Google Scholar] [CrossRef]
- Tubino, F. Probabilistic assessment of the dynamic interaction between multiple pedestrians and. vertical vibrations of footbridges. J. Sound. Vib. 2018, 417, 80–96. [Google Scholar] [CrossRef]
- Shoutao, L.; Min, R.; Zhifeng, Z.; Meiling, X. Theoretical models of a vertical human-structure interaction system. J. Vib. Shock 2019, 38, 174–179. [Google Scholar]
- Toso, M.A.; Gomes, H.M. A coupled biodynamic model for crowd-footbridge interaction. Eng. Struct. 2018, 177, 47–60. [Google Scholar] [CrossRef]
- Zhang, M.; Georgakis, C.T.; Chen, J. Biomechanically excited SMD model of a walking pedestrian. J. Bridge Eng. 2016, 21, C4016003. [Google Scholar] [CrossRef]
- Hamill, J.; Knutzen, K.M. Biomechanical Basis of Human Movement, 3rd ed.; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2012. [Google Scholar]
- De-yuan, D.; Guo-rui, C.; Zhou, C.; Xiao-qin, Z.; Jian-xin, L. Study on nonlinear paramettic vibration of footbridge considering time-lag effect. IOP Conf. Ser. Mater. Sci. Eng. 2019, 490, 89–96. [Google Scholar]
- Belykh, I.; Jeter, R.; Belykh, V. Foot force models of crowd dynamics on a wobbly bridge. Sci. Adv. 2017, 3, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Macdonald, J.H.G. Pedestrian-induced vibrations of the Clifton Suspension Bridge. Proc. Inst. Civ. Eng. Bridge Eng. 2008, 161, 69–77. [Google Scholar] [CrossRef]
- Carrol, S.P.; Owen, J.S.; Hussein, M.F.M. A coupled biomechanical/discrete element crowd model of crowd-bridge dynamic interaction and application to the Clifton Suspension Bridge. Eng. Struct. 2013, 49, 58–75. [Google Scholar] [CrossRef]
- Bocian, M.; Macdonald, J.H.G.; Burn, J.F. Probabilistic criteria for lateral dynamic stability of bridges under crowd loading. Comput. Struct. 2014, 136, 108–119. [Google Scholar] [CrossRef]
- Newland, D.E. Pedestrian excitation of footbridge. J. Bridge Eng. ASCE 2005, 10, 107–112. [Google Scholar]
- Erlicher, S.; Trovato, A.; Argoul, P. A modified hybrid Van der Pol/Rayleigh model for the lateral pedestrian force on a periodically moving floor. Mech. Syst. Signal Process. 2013, 41, 485–501. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, A.; Erlicher, S. A modified hybrid Van der Pol-Duffing-Rayleigh oscillator for modelling the lateral walking force on a rigid floor. Phys. D Nonlinear Phenomena. 2017, 358, 1–14. [Google Scholar] [CrossRef]
- Abrams, D.M. Two coupled oscillator models: The millennium bridge and the chimera state. Ph.D. Thesis, Cornell University, Ithaca, NY, USA, 2006. [Google Scholar]
- Zhou, C. A Study on Non-linear Dynamic Interaction between Long-span Flexible Footbridge and Pedestrians. Ph.D. Thesis, South China University of Technology, Guangzhou, China, 2015. [Google Scholar]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Chen, S.; Ye, X.; Zhou, Y. A Study on a Mechanism of Lateral Pedestrian-Footbridge Interaction. Appl. Sci. 2019, 9, 5257. https://doi.org/10.3390/app9235257
Chen Z, Chen S, Ye X, Zhou Y. A Study on a Mechanism of Lateral Pedestrian-Footbridge Interaction. Applied Sciences. 2019; 9(23):5257. https://doi.org/10.3390/app9235257
Chicago/Turabian StyleChen, Zhou, Siyuan Chen, Xijun Ye, and Yunlai Zhou. 2019. "A Study on a Mechanism of Lateral Pedestrian-Footbridge Interaction" Applied Sciences 9, no. 23: 5257. https://doi.org/10.3390/app9235257
APA StyleChen, Z., Chen, S., Ye, X., & Zhou, Y. (2019). A Study on a Mechanism of Lateral Pedestrian-Footbridge Interaction. Applied Sciences, 9(23), 5257. https://doi.org/10.3390/app9235257