Analysis of Elastic Nonlinearity Using Continuous Waves: Validation and Applications


Abstract
:1. Introduction
2. Semianalytical Approach for the Determination of Modulus and Damping
2.1. The Method: Modulus and Damping Nonlinearities Evaluation (MoDaNE)
2.1.1. One-Dimensional Solution
2.1.2. Inversion: Dispersion Relation and Attenuation Coefficient
2.2. Numerical Solutions
2.2.1. Numerical Approach
2.2.2. Estimation of Nonlinear Parameters on Velocity and Attenuation
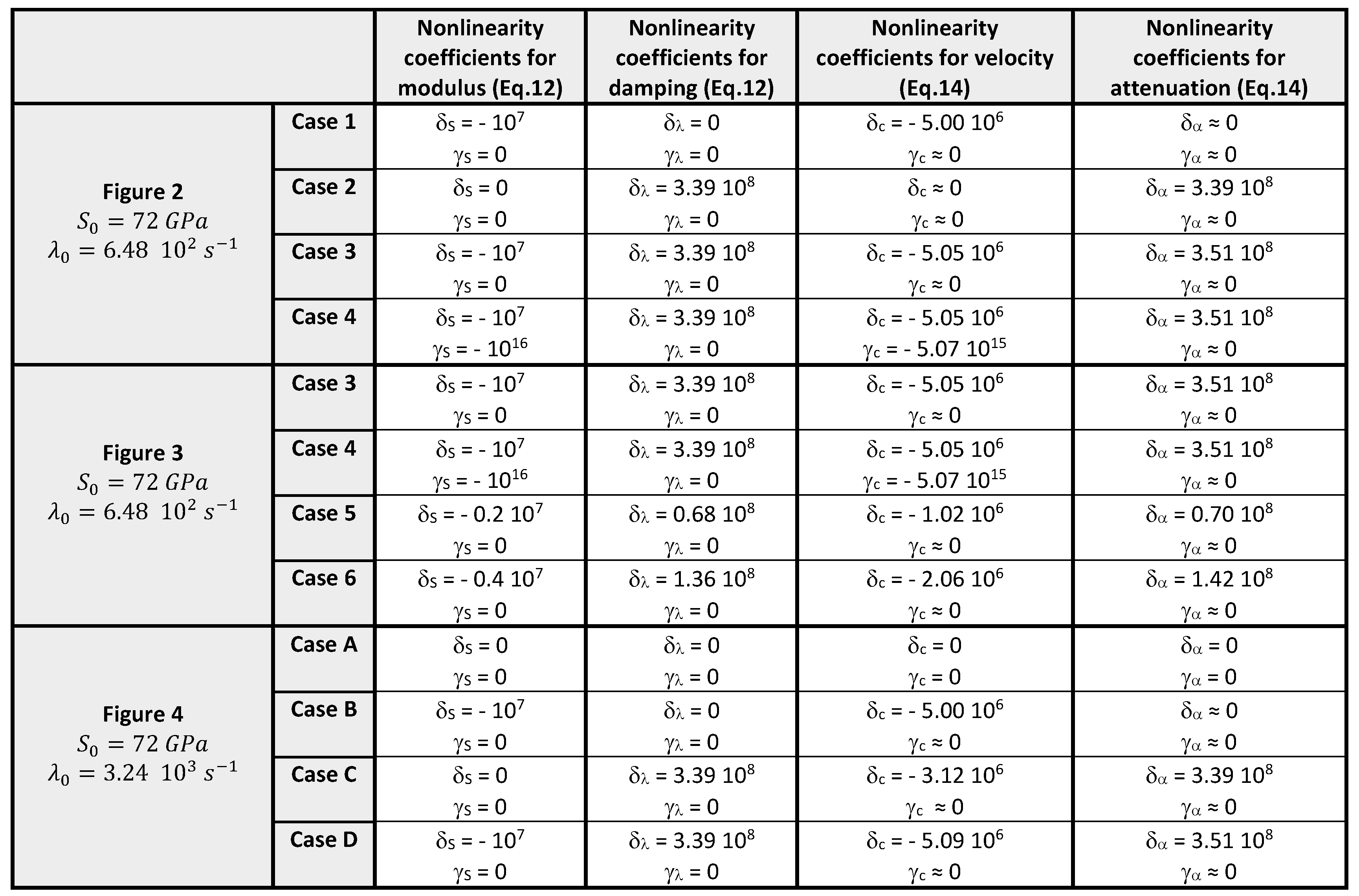
- For Cases 1 and 2, . In Case 3, the relationship between and given by Equation (14) is still approximately valid, being the effect of on about 1% only.
- In all cases, the effect of modulus nonlinearity on attenuation nonlinearity is more significant (more than 3% in Case 3). Therefore, the assumption is not accurate. The effect increases when increasing the modulus nonlinear parameter.
- In the case of materials with high damping, Cases C and D, a significant effect of damping nonlinearity on velocity nonlinearity is found and .
2.2.3. Numerical Analysis
- to verify the capability of the approach to separate nonlinearity in and c, comparing Cases 1, 2 and 3;
- validate the possibility to reproduce qualitatively the expected functional dependences (quadratic or quartic plus quadratic) of c and on strain: comparison of Cases 3 and 4;
- verify that the approach allows to detect the effects of S/ nonlinearities on c/ nonlinearities: Cases 3 and C; and
- verify that, at least in some circumstances as shown below, the approach allows quantifying correctly the nonlinear parameters and : Cases 3, 5 and 6.
3. Validation
3.1. Feasibility of the Separation of Modulus and Damping Contributions
3.1.1. Low Linear Damping
- The method allows separation of modulus and damping contributions. Indeed, in Cases 1 and 2, in which only one physical parameter is nonlinear (either S or ), only the corresponding measurable quantity (either c or ) manifests nonlinearity.
- The method allows determining accurately the functional dependence on A of velocity and attenuation coefficient relative variations. Curves were fitted with a polynomial function in the form:While in Cases 1, 2 and 3 the fitting coefficient was negligible (for the velocity dependence on A), in Case 4 the coefficient plays a crucial role (more details in comments on Figure 4).
- In this analysis, there is no quantitative prediction of the nonlinear parameters. Indeed, numerical solutions were based on a dependence of velocity and attenuation on strain, and not on displacement amplitude. Hence, as expected, the fitting coefficients and , both for the relative variations of velocity and attenuation, do not correspond to the nonlinear parameters used as input in the numerical code. A quantitative analysis, which is discussed in Section 3.2, is possible but it implies further considerations.
3.1.2. Estimation of the Relative Weight of Nonlinearities
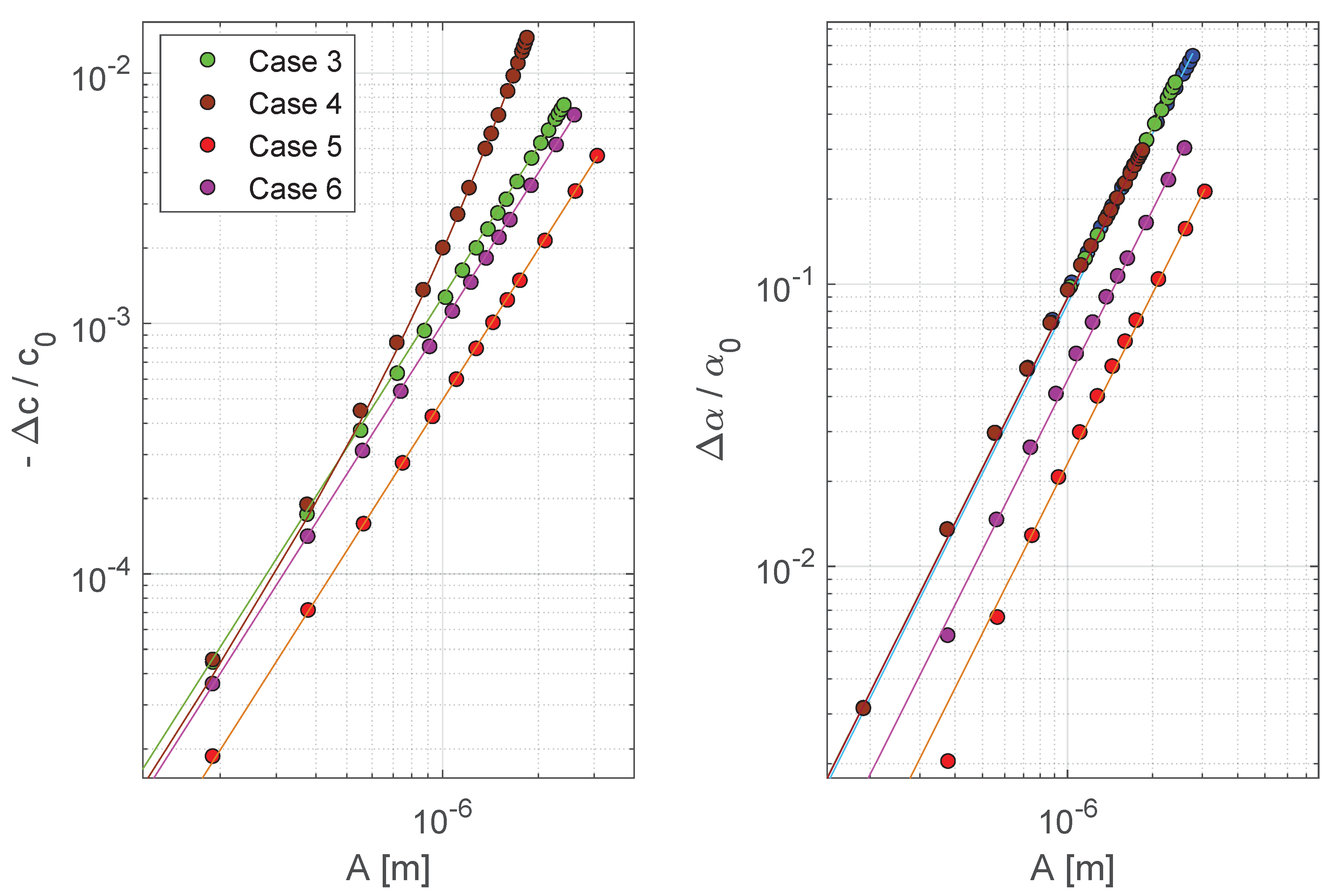
- The curves are straight lines with slope 2 (we recall that the slope in log-log scale of a power law function corresponds to the power law exponent), except for velocity in Case 4. Indeed, in this case, the modulus dependence on strain is not a power law (see also Equation (12)). It is important to observe that in this case the power law quadratic dependence of damping is still well reconstructed by the analysis.
- Cases 5 and 6 differ from Case 3 only because the nonlinear parameters are scaled: and . In both cases, the slope of the curves describing c and vs. amplitude remains 2 (as expected). Furthermore, the vertical shift of the curves of a quantity with respect to that of Case 3 preserves the proportionality with respect to the theoretical nonlinear coefficients. Indeed, results of the fit show that for each of the two cases . Therefore, monitoring nonlinearity evolution as a function of time, in samples subjected to progressive damage, is feasible with the proposed approach.
3.1.3. High Linear Damping
- Case A: As expected, in the linear case, there are no variations on both velocity and attenuation coefficient.
- Cases B and D: In both cases, nonlinearity in c (Case B) or both in c and (Case D) are observed, as expected. For attenuation coefficients with respect to the expected behaviour for the two cases, this is not the case for the estimated velocity nonlinearity, even though the nonlinear modulus parameters are the same for the two cases. The slight difference (appreciable for high strain levels) is due to the small damping contribution to velocity nonlinearity when damping is strong.
- Case C: In this case, the effects of damping nonlinearity on velocity are more easily appreciated. In fact, the imposed quadratic nonlinearity on damping induces nonlinearity on attenuation coefficient as well as on velocity (green circles).
3.1.4. Hysteresis
3.2. Quantitative Behaviour
4. Efficiency and Robustness of the Approach
4.1. Frequency Dependence
4.2. Dependence on Calibration Errors
4.3. Dependence on Signal Distortions
5. Experimental Validation
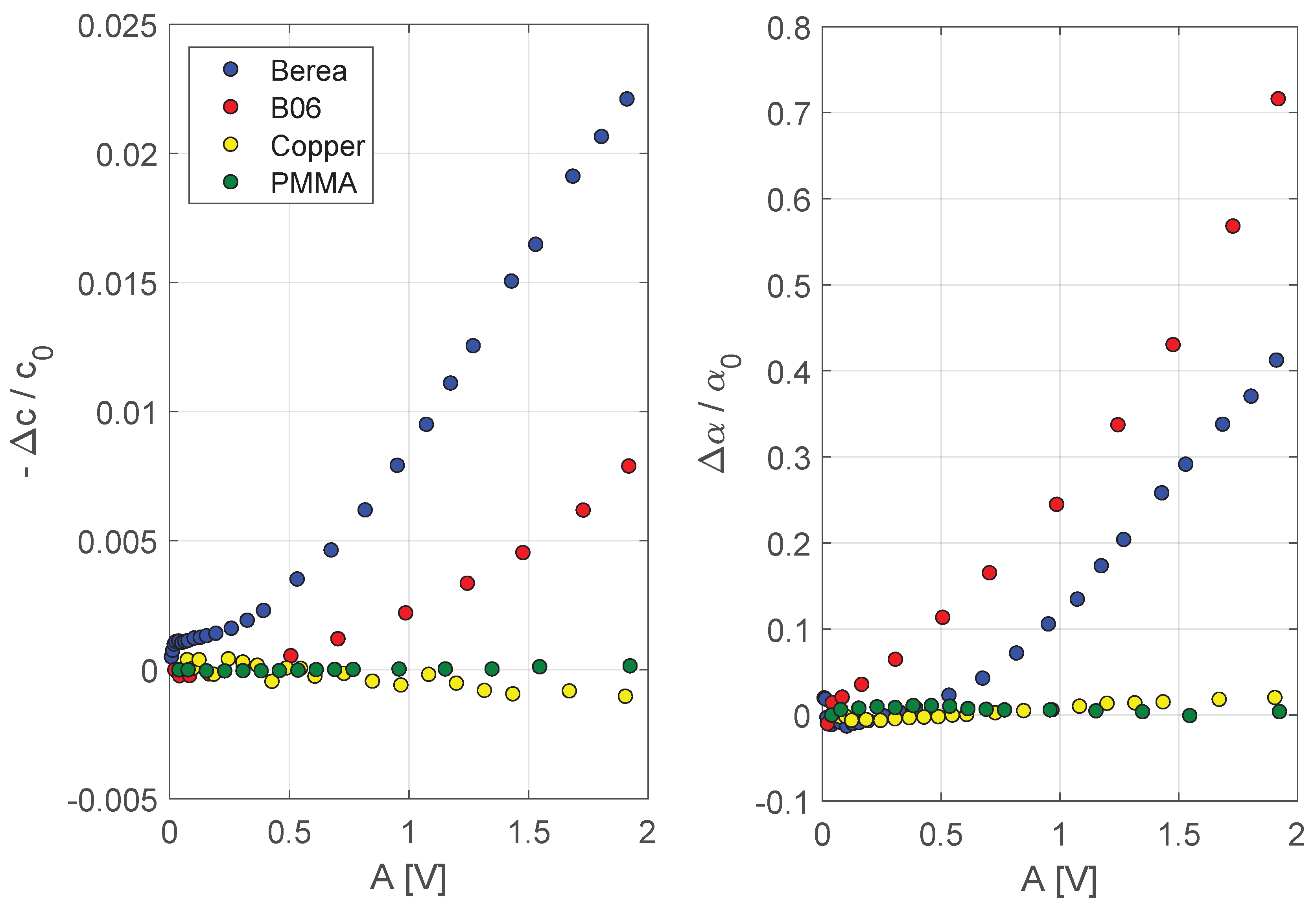
- The concrete sample (B06) was in the shape of a cylinder (4 cm diameter and 16 cm length), and was drilled from a casting prepared with 340 kg of cement (CEM II A-L 42.5 R), 957 kg of sand (0–5 mm), 846 kg of gravel (5–15 mm) and 200 kg of water (w/c ratio ).
- The Berea sandstone sample was a thin cylinder with a diameter of 1 cm and 15 cm long. The size of the grains in this sample is of the order of tens of micrometers.
- The two linear samples (PMMA and copper) were in the shape of cylinders (section of cm and length of cm). Both samples were intact.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Displacement Solution
Appendix B. Strain Solution
Appendix C. Proportionality between Spatial and Temporal Averaged Strain and Output Amplitude
References
- Shah, A.A.; Ribakov, J. Non-destructive evaluation of concrete in damaged and undamaged states. Mater. Des. 2009, 30, 3504–3511. [Google Scholar] [CrossRef]
- Antonaci, P.; Bruno, C.L.E.; Bocca, P.G.; Scalerandi, M.; Gliozzi, A.S. Nonlinear ultrasonic evaluation of load effects on discontinuities in concrete. Cem. Concr. Res. 2010, 40, 340–346. [Google Scholar] [CrossRef]
- Ongpeng, J.M.; Oreta, A.W.; Hirose, S. Monitoring Damage Using Acoustic Emission Source Location and Computational Geometry in Reinforced Concrete Beams. Appl. Sci. 2018, 8, 189. [Google Scholar] [CrossRef] [Green Version]
- Guyer, R.A.; TenCate, J.A.; Johnson, P.A. Hysteresis and the dynamic elasticity of consolidated granular materials. Phys. Rev. Lett. 1999, 82, 3280–3283. [Google Scholar] [CrossRef] [Green Version]
- Rivière, J.; Shokouhi, P.; Guyer, R.A.; Johnson, P.A. A set of measures for the systematic classification of the nonlinear elastic behavior of disparate rocks. J. Geophys. Res. Solid Hearth 2015, 120, 1587–1604. [Google Scholar] [CrossRef]
- Zaitsev, V.Y.; Gusev, V.E.; Tournat, V.; Richard, P. Slow Relaxation and Aging Phenomena at the Nanoscale in Granular Materials. Phys. Rev. Lett. 2014, 112, 108302. [Google Scholar] [CrossRef] [Green Version]
- Solodov, I.; Busse, G. Resonance ultrasonic thermography: Highly efficient contact and air-coupled remote modes. Appl. Phys. Lett. 2013, 102, 061905. [Google Scholar] [CrossRef]
- Genoves, V.; Riestra, C.; Borrachero, M.V.; Eiras, J.; Kundu, T.; Payá, J. Multimodal analysis of GRC ageing process using nonlinear impact resonance acoustic spectroscopy. Compos. Part B Eng. 2015, 76, 105–111. [Google Scholar] [CrossRef] [Green Version]
- Amura, M.; Meo, M. Prediction of residual fatigue life using nonlinear ultrasound. Smart Mat. Struct. 2012, 21, 045001. [Google Scholar] [CrossRef]
- Hong, X.; Liu, Y.; Lin, X.; Luo, Z.; He, Z. Nonlinear Ultrasonic Detection Method for Delamination Damage of Lined Anti-Corrosion Pipes Using PZT Transducers. Appl. Sci. 2018, 8, 2240. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Yang, S.; Liu, X. Detection and Quantification of Damage in Metallic Structures by Laser-Generated Ultrasonics. Appl. Sci. 2018, 8, 824. [Google Scholar] [CrossRef] [Green Version]
- Van den Abeele, K.; De Visscher, J. Damage assessment in reinforced concrete using spectral and temporal nonlinear vibration techniques. Cem. Concr. Res. 2000, 30, 1453–1464. [Google Scholar] [CrossRef]
- Gliozzi, A.S.; Scalerandi, M.; Anglani, G.; Antonaci, P.; Salini, L. Correlation of elastic and mechanical properties of consolidated granular media during microstructure evolution induced by damage and repair. Phys. Rev. Mat. 2018, 2, 013601. [Google Scholar] [CrossRef]
- Trarieux, C.; Callé, S.; Moreschi, H.; Renaud, G.; Defontaine, M. Modeling nonlinear viscoelasticity in dynamic acoustoelasticity. Appl. Phys. Lett. 2014, 105, 264103. [Google Scholar] [CrossRef]
- Scalerandi, M.; Bentahar, M.; Mechri, C. Conditioning and elastic nonlinearity in concrete: Separation of damping and phase contributions. Constr. Build. Mater. 2018, 161, 208–220. [Google Scholar] [CrossRef]
- TenCate, J.A.; Pasqualini, D.; Habib, S.; Heitmann, K.; Higdon, D.; Johnson, P.A. Nonlinear and nonequilibrium dynamics in geomaterials. Phys. Rev. Lett. 2004, 93, 065501. [Google Scholar] [CrossRef] [Green Version]
- Scalerandi, M.; Gliozzi, A.S.; Bruno, C.L.E.; Antonaci, P. Nonequilibrium and hysteresis in solids: Disentangling conditioning from nonlinear elasticity. Phys. Rev. B 2010, 81, 104114. [Google Scholar] [CrossRef]
- Darling, T.W.; TenCate, J.A.; Brown, D.W.; Clausen, B.; Vogel, S.C. Neutron diffraction study of the contribution of grain contacts to nonlinear stress-strain behavior. Geoph. Res. Lett. 2004, 31, L16604. [Google Scholar] [CrossRef] [Green Version]
- Aleshin, V.; Van den Abeele, K. Hertz-Mindlin problem for arbitrary oblique 2D loading: General solution by memory diagrams. J. Mech. Phys. Solids 2012, 60, 14–36. [Google Scholar] [CrossRef]
- Pecorari, C. Adhesion and nonlinear scattering by rough surfaces in contact: Beyond the phenomenology of the Preisach-Mayergoyz framework. J. Acoust. Soc. Am. 2004, 116, 1938. [Google Scholar] [CrossRef]
- Gusev, V.; Chigarev, N. Nonlinear frequency-mixing photoacoustic imaging of a crack: Theory. J. Appl. Phys. 2010, 107, 124905. [Google Scholar] [CrossRef]
- Shkerdin, G.; Glorieux, C. Nonlinear modulation of Lamb modes by clapping delamination. J. Acoust. Soc. Am. 2008, 124, 3397–3409. [Google Scholar] [CrossRef] [PubMed]
- Kamimura, T.; Yoshida, S.; Sasaki, T. Evaluation of Ultrasonic Bonding Strength with Optoacoustic Methods. Appl. Sci. 2018, 8, 1026. [Google Scholar] [CrossRef] [Green Version]
- Granato, A.V.; Lucke, K. Theory of Mechanical Damping Due to Dislocations. J. Appl. Phys. 1956, 27, 583–593. [Google Scholar] [CrossRef]
- Chen, J.; Kim, J.Y.; Kurtis, K.E.; Jacobs, L.J. Theoretical and experimental study of the nonlinear resonance vibration of cementitious materials with an application to damage characterization. J. Acoust. Soc. Am. 2011, 130, 2728–2737. [Google Scholar] [CrossRef]
- Scalerandi, M.; Griffa, M.; Antonaci, P.; Wyrzykowski, M.; Lura, P. Nonlinear elastic response of thermally damaged consolidated granular media. J. Appl. Phys. 2013, 113, 154902. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Lomonosov, A.M.; Shen, Z.; Seo, H.; Jhang, K.-Y.; Gusev, V.E.; Ni, C. Monitoring of Thermal Aging of Aluminum Alloy via Nonlinear Propagation of Acoustic Pulses Generated and Detected by Lasers. Appl. Sci. 2019, 9, 1191. [Google Scholar] [CrossRef] [Green Version]
- Bouchaala, F.; Payan, C.; Garnier, V.; Balayssac, J.P. Carbonation assessment in concrete by nonlinear ultrasound. Cem. Concr. Res. 2011, 41, 557–559. [Google Scholar] [CrossRef]
- Antonaci, P.; Bruno, C.L.E.; Scalerandi, M.; Tondolo, F. Effects of corrosion on linear and nonlinear elastic properties of reinforced concrete. Cem. Concr. Res. 2013, 51, 96–103. [Google Scholar] [CrossRef]
- Boukari, Y.; Bulteel, D.; Rivard, P.; Abriak, N.-E. Combining nonlinear acoustics and physico-chemical analysis of aggregates to improve alkali-silica reaction monitoring. Cem. Concr. Res. 2015, 67, 44–51. [Google Scholar] [CrossRef]
- Hilloulin, B.; Legland, J.-B.; Lys, E.; Abraham, O.; Loukili, A.; Grondin, F.; Durand, O.; Tournat, V. Monitoring of autogenous crack healing in cementitious materials by the nonlinear modulation of ultrasonic coda waves, 3D microscopy and X-ray microtomography. Constr. Build. Mater. 2016, 123, 143–152. [Google Scholar] [CrossRef] [Green Version]
- Ait Ouarabi, M.; Antonaci, P.; Boubenider, F.; Gliozzi, A.S.; Scalerandi, M. Ultrasonic monitoring of the interaction between cement matrix and alkaline silicate solution in self-healing systems. Materials 2017, 10, 46. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scalerandi, M.; Idjimarene, S.; Bentahar, M.; El Guerjouma, R. Evidence of microstructure evolution in solid elastic media based on a power law analysis. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 334–347. [Google Scholar] [CrossRef]
- Scalerandi, M. Power laws and elastic nonlinearity in materials with complex microstructure. Phys. Lett. A 2015, 380, 413–421. [Google Scholar] [CrossRef]
- Riviere, J.; Renaud, G.; Guyer, R.A.; Johnson, P.A. Pump and probe waves in dynamic acousto-elasticity: Comprehensive description and comparison with nonlinear elastic theories. J. Appl. Phys. 2013, 114, 054905. [Google Scholar] [CrossRef] [Green Version]
- Kim, G.; Kim, J.-Y.; Kurtis, K.E.; Jacobs, L.J. Drying shrinkage in concrete assessed by nonlinear ultrasound. Cem. Concr. Res. 2017, 92, 16. [Google Scholar] [CrossRef]
- Ulrich, T.J.; Johnson, P.A.; Muller, M.; Mitton, D.; Talmant, M.; Laugier, P. Application of nonlinear dynamics to monitoring progressive fatigue damage in human cortical bone. Appl. Phys. Lett. 2007, 91, 213901. [Google Scholar] [CrossRef] [Green Version]
- Payan, C.; Garnier, V.; Moysan, J. Applying nonlinear resonant ultrasound spectroscopy to improving thermal damage assessment in concrete. J. Acoust. Soc. Am. 2007, 121, EL125. [Google Scholar] [CrossRef] [Green Version]
- Scalerandi, M.; Gliozzi, A.S.; Bruno, C.L.E.; Masera, D.; Bocca, P. A scaling method to enhance detection of a nonlinear elastic response. Appl. Phys. Lett. 2008, 92, 101912. [Google Scholar] [CrossRef] [Green Version]
- Ait Ouarabi, M.; Boubenider, F.; Gliozzi, A.S.; Scalerandi, M. Nonlinear coda wave analysis of hysteresis in strongly scattering elastic media. Phys. Rev. B 2016, 94, 134103. [Google Scholar] [CrossRef]
- Ohara, Y.; Shintaku, Y.; Horinouchi, S.; Ikeuchi, M.; Yamanaka, K. Enhancement of Selectivity in Nonlinear Ultrasonic Imaging of Closed Cracks Using Amplitude Difference Phased Array. Jpn. J. Appl. Phys. 2012, 51, 07GB18. [Google Scholar] [CrossRef]
- Tournat, V.; Gusev, V. Nonlinear effects for coda-type elastic waves in stressed granular media. Phys. Rev. E 2009, 80, 011306. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Renaud, G.; Rivière, J.; Haupert, S.; Laugier, P. Anisotropy of dynamic acoustoelasticity in limestone, influence of conditioning, and comparison with nonlinear resonance spectroscopy. J. Acoust. Soc. Am. 2013, 133, 3706–3718. [Google Scholar] [CrossRef] [PubMed]
- Remillieux, M.C.; Guyer, R.A.; Payan, C.; Ulrich, T.J. Decoupling Nonclassical Nonlinear Behavior of Elastic Wave Types. Phys. Rev. Lett. 2016, 116, 115501. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mechri, C.; Scalerandi, M.; Bentahar, M. Separation of Damping and Velocity Strain Dependencies using an Ultrasonic Monochromatic Exctitation. Phys. Rev. Appl. 2019, 11, 054050. [Google Scholar] [CrossRef] [Green Version]
- Nobili, M.; Scalerandi, M. Temperature effects on the elastic properties of hysteretic elastic media: Modeling and simulations. Phys. Rev. B 2004, 69, 104105. [Google Scholar] [CrossRef]
- Lott, M.; Payan, C.; Garnier, V.; Vu, Q.A.; Eiras, J.N.; Remillieux, M.C.; Le Bas, P.-Y.; Ulrich, T.J. Three-dimensional treatment of nonequilibrium dynamics and higher order elasticity. Appl. Phys. Lett. 2016, 108, 141907. [Google Scholar] [CrossRef]
- Delsanto, P.P.; Scalerandi, M. A spring model for the simulation of the propagation of ultrasonic pulses through imperfect contact interfaces. J. Acoust. Soc. Am. 1998, 104, 2584. [Google Scholar] [CrossRef]
- Delsanto, P.P.; Scalerandi, M. Modeling Nonclassical Nonlinearity, Conditioning and Slow Dynamics Effects in Mesoscopic Elastic Materials. Phys. Rev. B 2003, 68, 064107. [Google Scholar] [CrossRef]
- Bentahar, M.; El Aqra, H.; El Guerjouma, R.; Griffa, M.; Scalerandi, M. Hysteretic elasticity in damaged concrete: Quantitative analysis of slow and fast dynamics. Phys. Rev. B 2006, 73, 014116. [Google Scholar] [CrossRef]
- Johnson, P.A.; Zinsner, B.; Rasolofosaon, P.N.J. Resonance and elastic properties in rock. J. Geoph. Res. Sol. Earth 1996, 101, 11553–11564. [Google Scholar] [CrossRef]
- Renaud, G.; Talmant, M.; Callé, S.; Defontaine, M.; Laugier, P. Nonlinear elastodynamic in microinhomogeneous solids observed by head-wave based dynamic acoustoelastic testing. J. Acoust. Soc. Am. 2011, 130, 3583–3589. [Google Scholar] [CrossRef] [PubMed]
- Scalerandi, M.; Mechri, C.; Bentahar, M.; Di Bella, A.; Gliozzi, A.S.; Tortello, M. Experimental evidence of correlations between conditioning and relaxation in hysteretic elastic media. Phys. Rev. Appl. 2019, 12, 044002. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Bella, A.; Gliozzi, A.S.; Scalerandi, M.; Tortello, M. Analysis of Elastic Nonlinearity Using Continuous Waves: Validation and Applications. Appl. Sci. 2019, 9, 5332. https://doi.org/10.3390/app9245332
Di Bella A, Gliozzi AS, Scalerandi M, Tortello M. Analysis of Elastic Nonlinearity Using Continuous Waves: Validation and Applications. Applied Sciences. 2019; 9(24):5332. https://doi.org/10.3390/app9245332
Chicago/Turabian StyleDi Bella, Angelo, Antonio S. Gliozzi, Marco Scalerandi, and Mauro Tortello. 2019. "Analysis of Elastic Nonlinearity Using Continuous Waves: Validation and Applications" Applied Sciences 9, no. 24: 5332. https://doi.org/10.3390/app9245332
APA StyleDi Bella, A., Gliozzi, A. S., Scalerandi, M., & Tortello, M. (2019). Analysis of Elastic Nonlinearity Using Continuous Waves: Validation and Applications. Applied Sciences, 9(24), 5332. https://doi.org/10.3390/app9245332