The Development of a Soft Robot Hand with Pin-Array Structure


Abstract
:Featured Application
Abstract
1. Introduction
- (1)
- Industrial grippers are designed for the purpose of simplicity, safety, and low cost. Usually, there are several parts that can move relative to each other, such as MPG gripper [1] and MPZ gripper [2] developed by the SCHUNK. In addition, some industrial grippers use electromagnets and suction cups to achieve the function of grasping. However, this kind of gripper has the disadvantage of a single function, and a particular type of gripper can only be used on a particular type of production line.
- (2)
- The dexterous robot hands are designed to mimic the structure of the human hand and are designed to have multiple fingers. Salibury [3] defines the dexterous robot hand like a robot hand with more than 3 fingers and more than 9 degrees of freedoms (DOFs). Common dexterous hands, such as Utah/MIT hand [4], Gifu hand [5,6,7], and shadow hand [8], mimic the structure of the human hand and can perform complex operations, but they bring complex drive systems and control systems, as well as high costs.
- (3)
- In order to solve the high-cost problem of the dexterous hand, the underactuated robot hand is proposed. The underdrive means that the number of driving sources is smaller than the DOFs of the robot hand. From the existing research, the underactuated robot hand can be roughly divided into two parts, one is with obvious finger structure and the other is without obvious finger structure. This paper mainly studies on the underactuated robot hand.
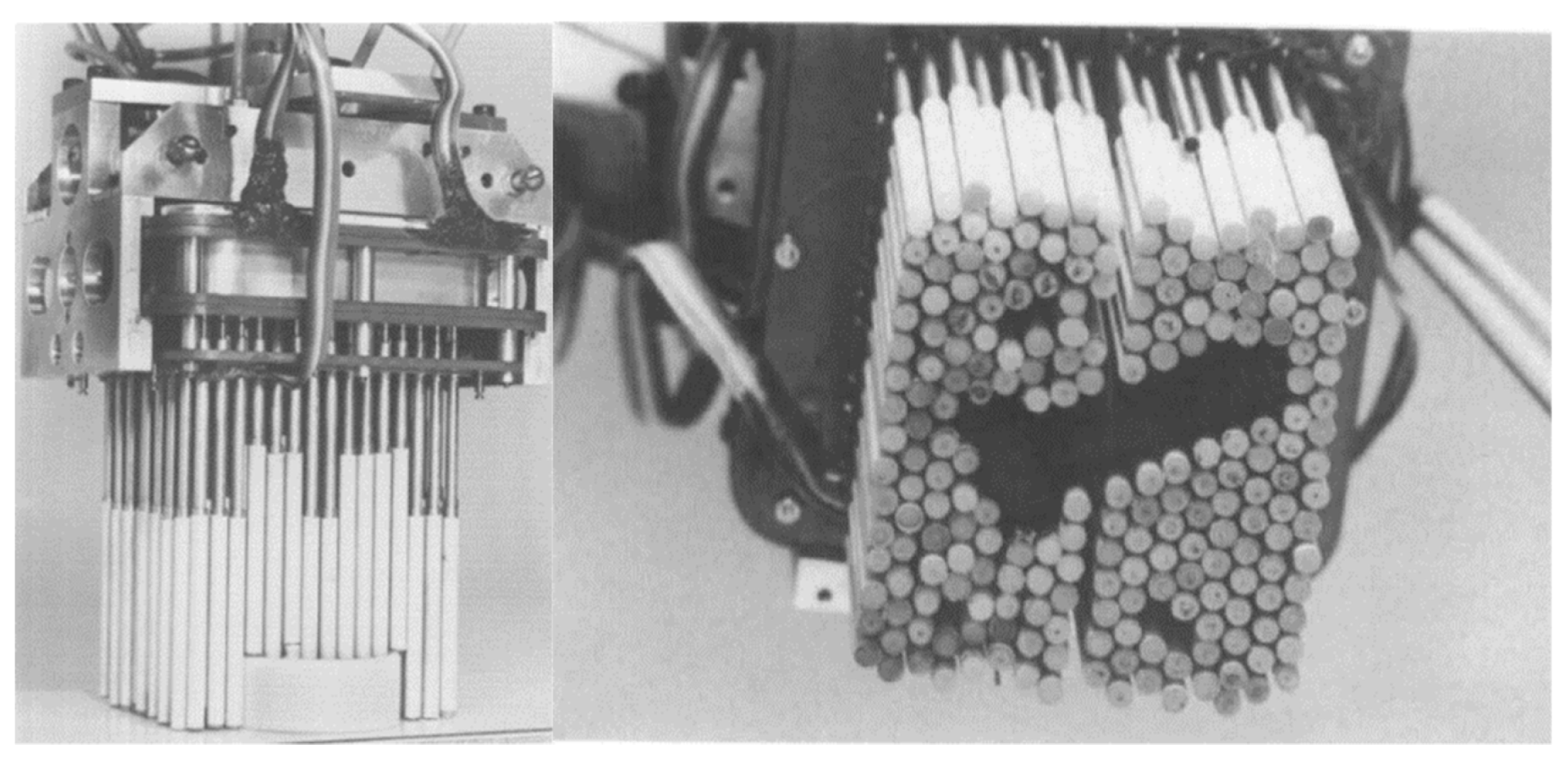
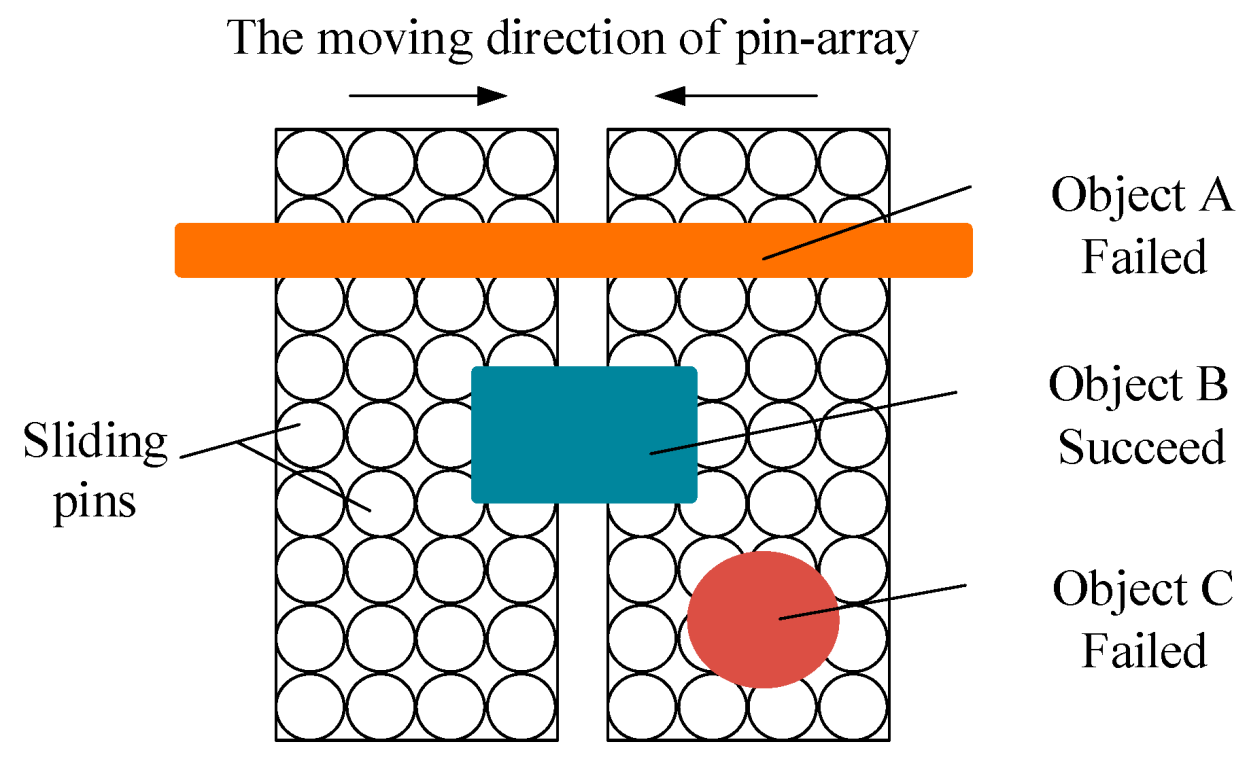
2. The Cluster-Tube Self-Adaptive Grasping Mode
3. Design of CTSA-II Hand
3.1. Design Idea
- (1)
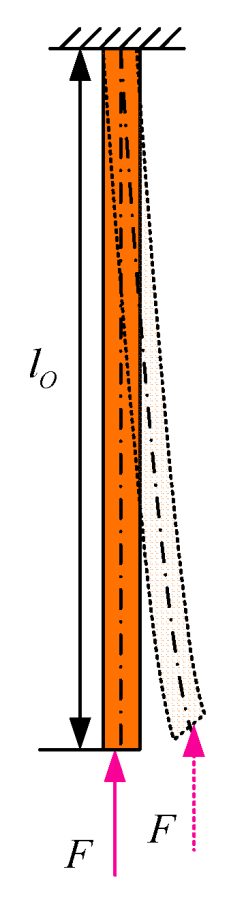
- Use the bendable pin to take place of the rigid slide tube assembly of the CTSA hand. The bendable pin has rigidity in its axial direction and can withstand the axial force without obvious deformation. In addition, the bendable pin has flexibility in the directions perpendicular to its axis, which means the pin can be bent when subjected to a lateral load and can revert to the initial position after the lateral load is removed. By replacing the rigid sliding tube with a bendable pin, and replacing the swinging with bending, the mechanical structure is greatly simplified, and the assembly difficulty is reduced, making the possibility of mass production higher.
- (2)
- Wrap all pins with a membrane. On the one hand, the pins are isolated from the outside world to avoid damage to the sliding mechanism by impurities such as dust outside, and on the other hand, the contact area between the robot hand and the object is increased, improving the reliability of grasping.
- (3)
- The fluid drive is used instead of the tendon driving with pneumatic driving. Changing the driving mode avoids the use of the motor and gears, which can reduce the size of the device and greatly simplify the mechanism of the device.
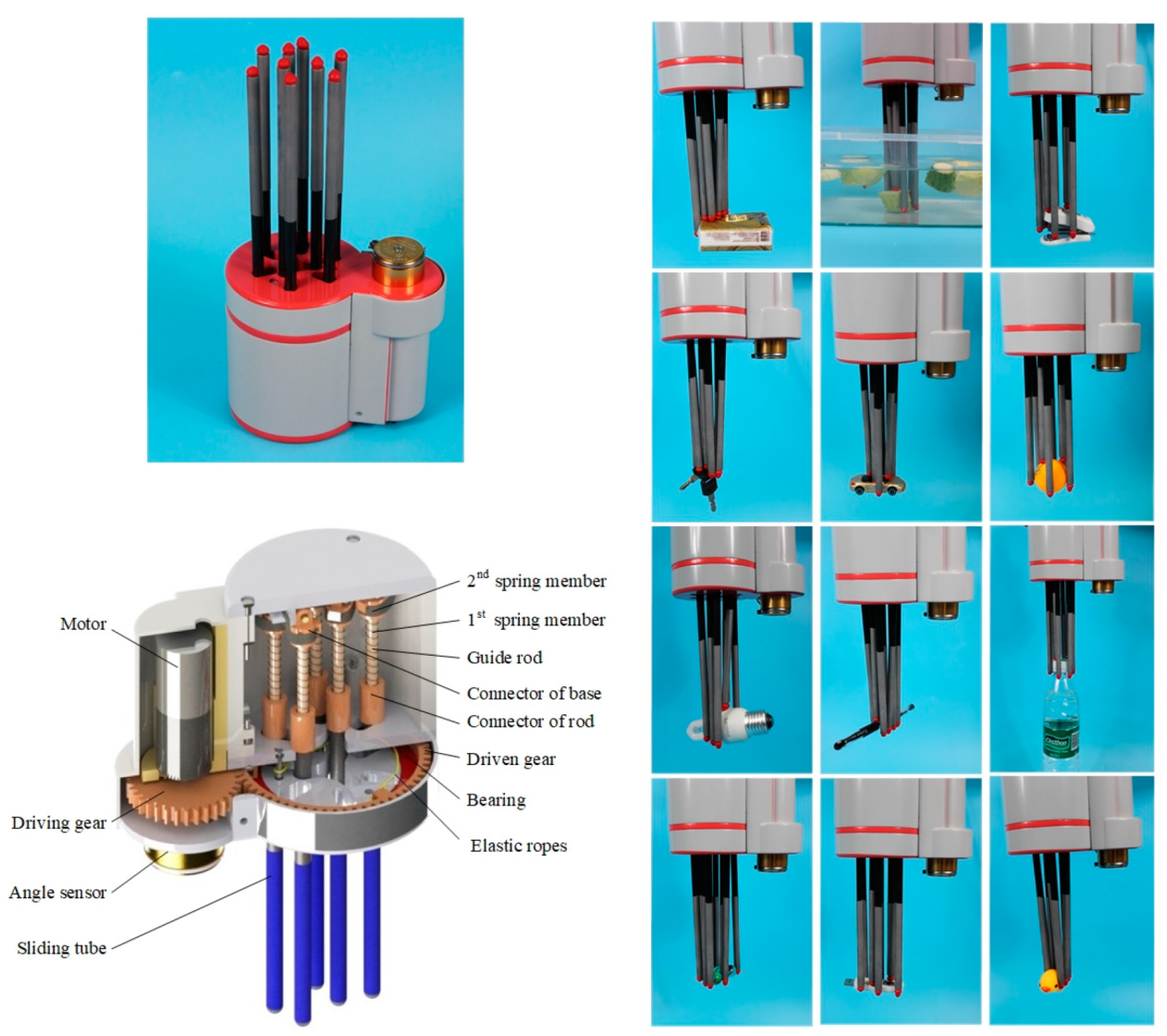
3.2. The Specific Structure of the Robot Hand
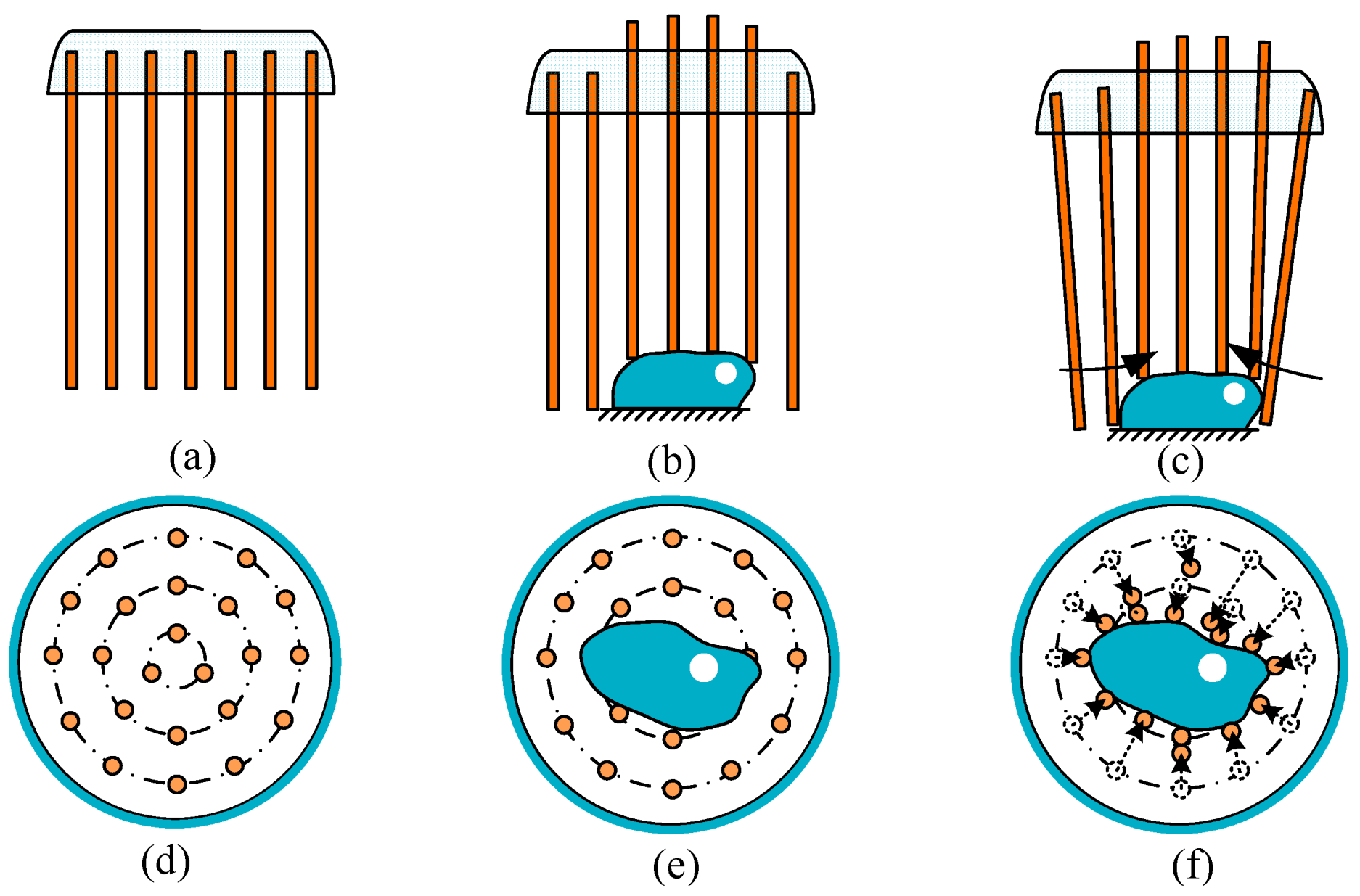
3.3. Grasping Principle
4. Analyze
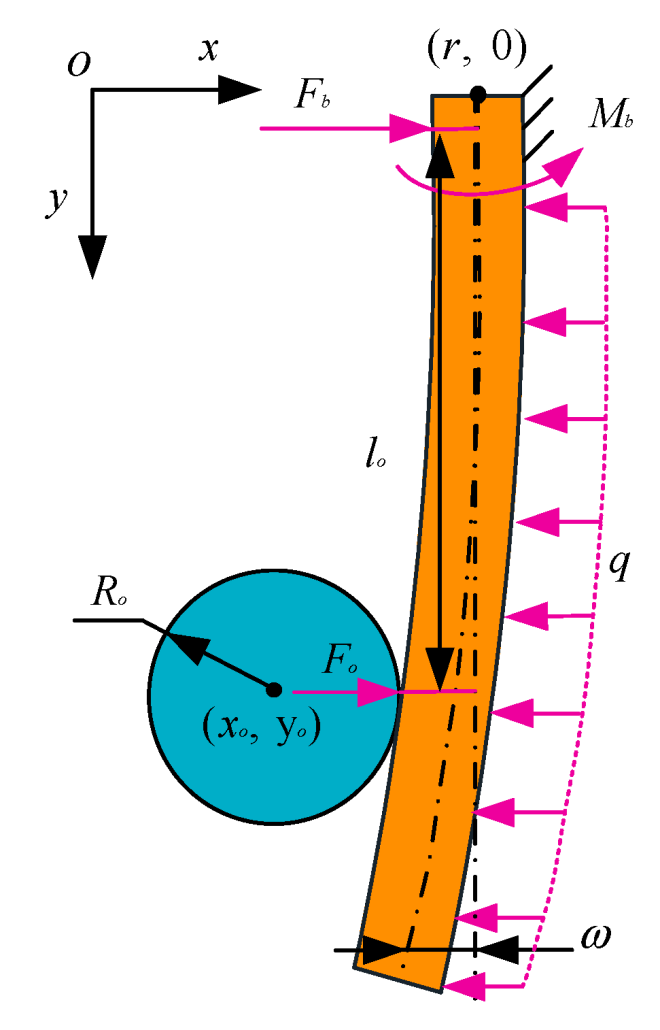
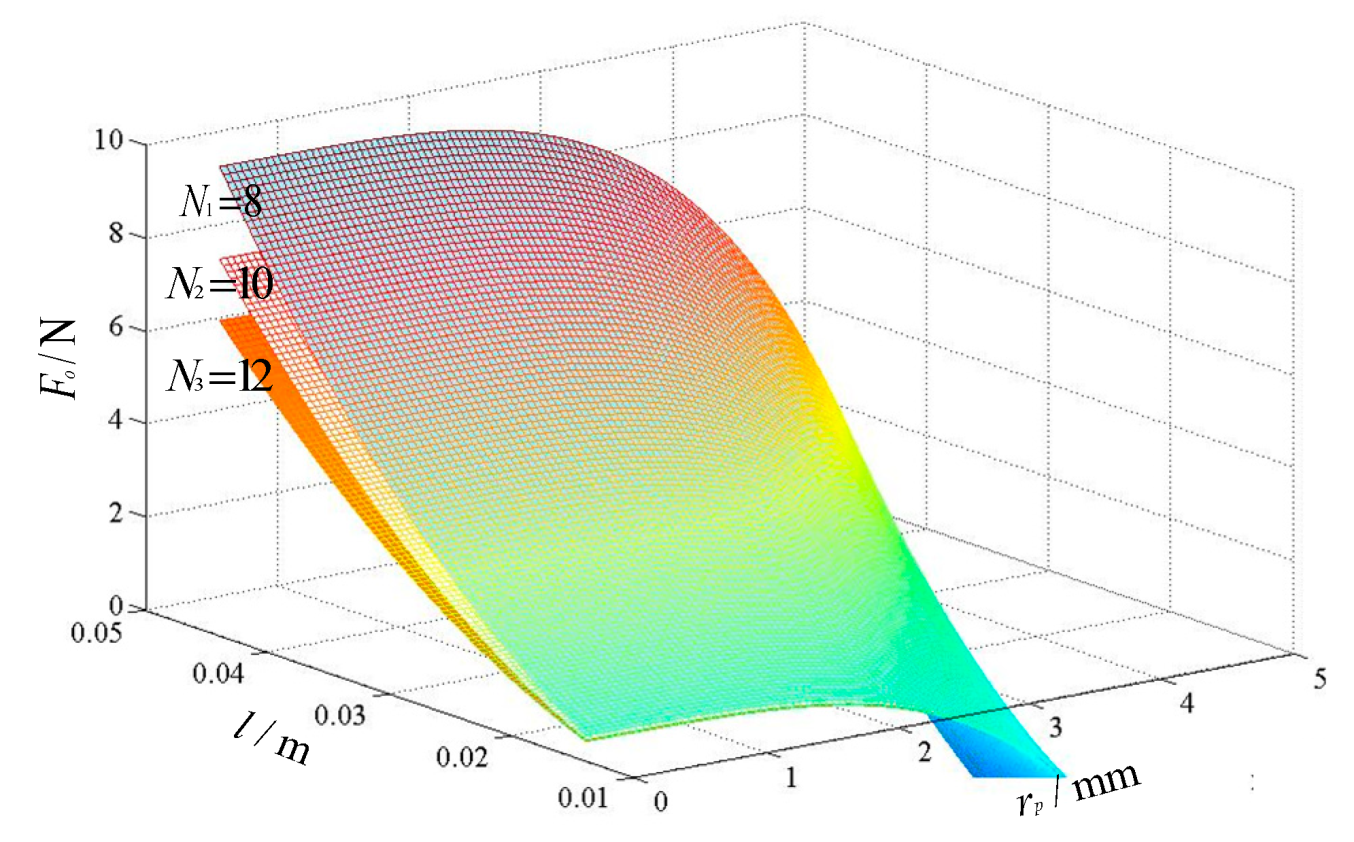
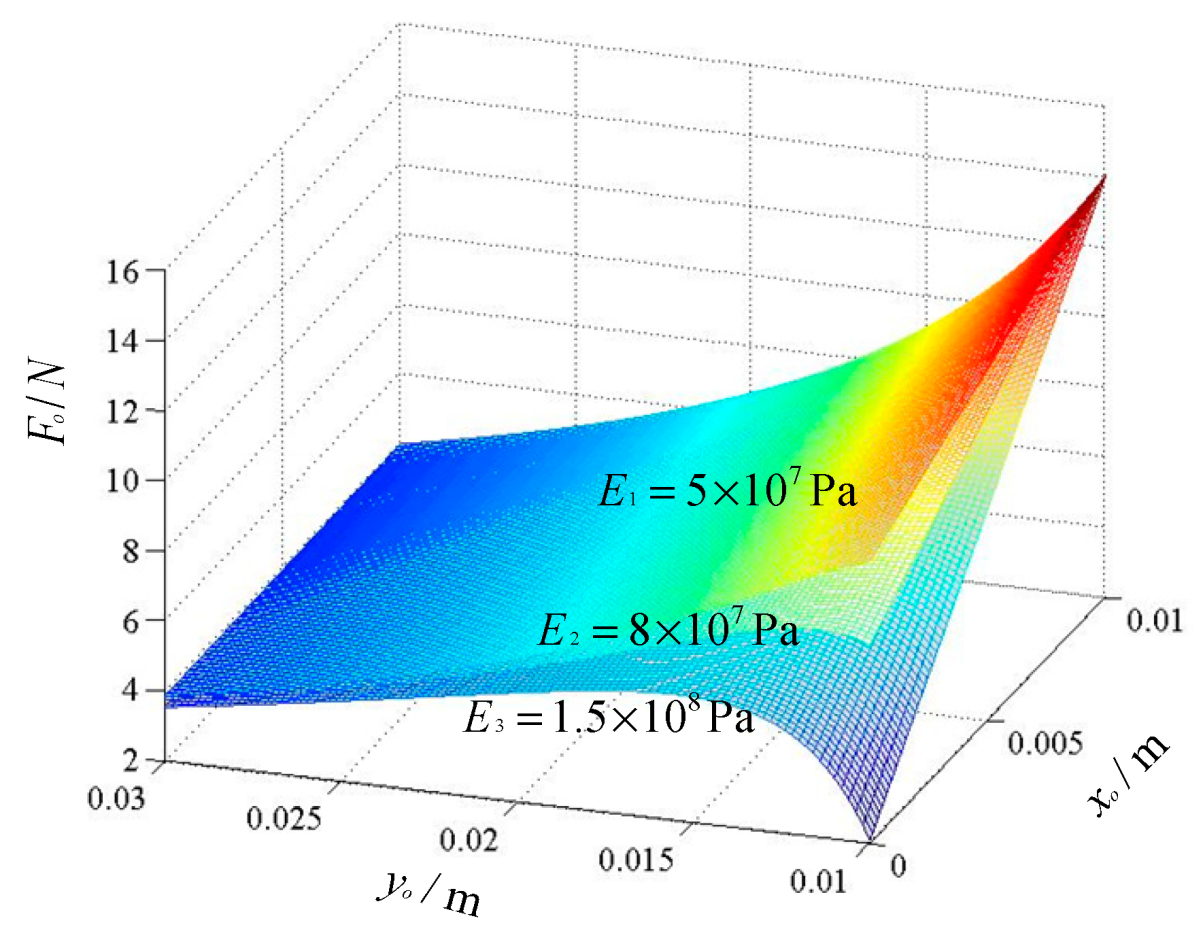
4.1. Analysis of the Grasping Force
4.2. Stability Analysis of a Pin
5. The Prototype and the Experiments
5.1. The Development of the Prototype
5.1.1. Component Selection
5.1.2. The Prototype of CTSA-II Hand
5.2. The Experiments with the Verification of the Crawl Function
- (1)
- The CTSA-II hand has a high degree of self-adaptation, and can effectively capture objects of different sizes, shapes, materials, and qualities;
- (2)
- The CTSA-II hand has a high success rate of grabbing and reliable gripping.
5.3. Experiments with the Exploration of Grab Performance
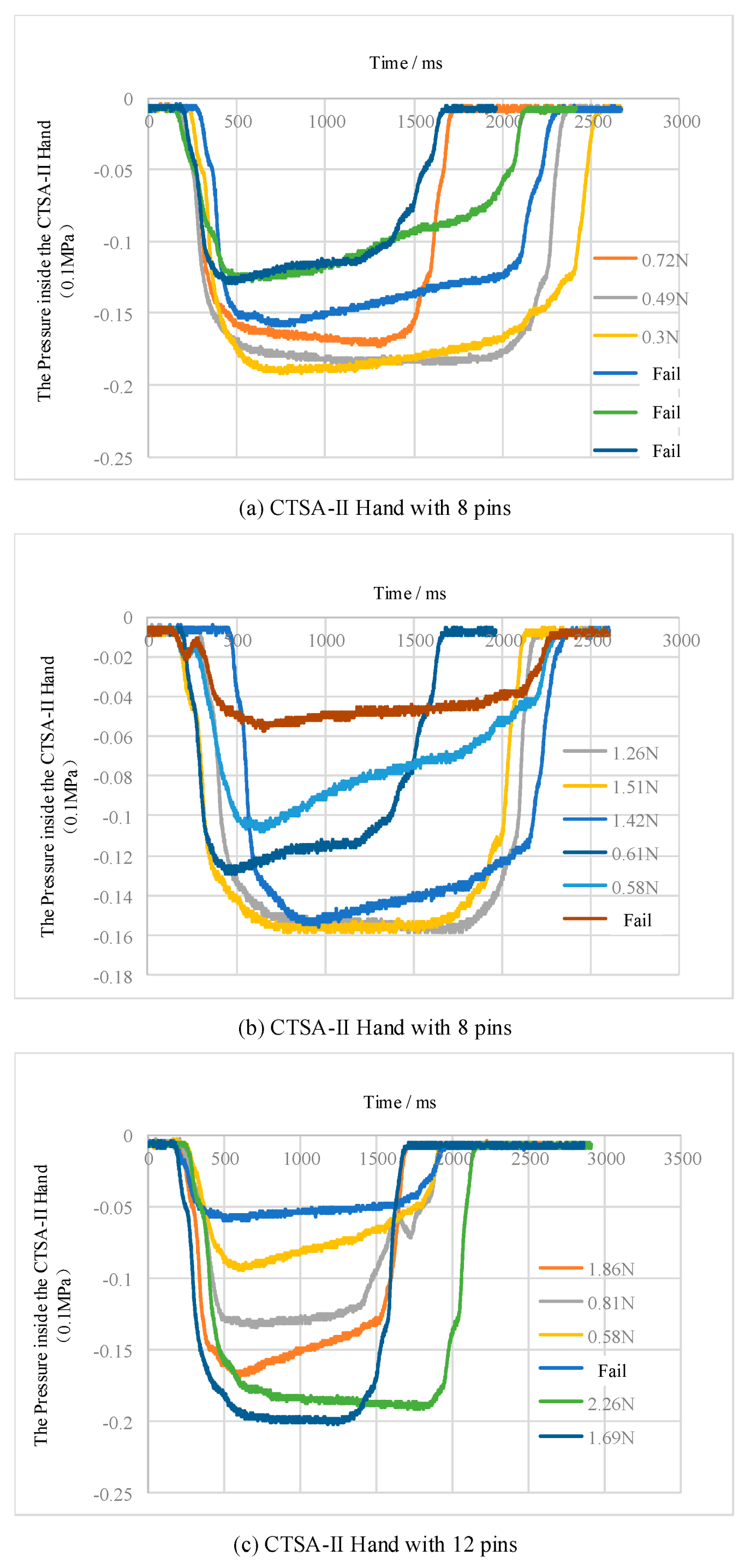
5.3.1. The Internal Pressure of CTSA-II Hand
5.3.2. The Size of the Target Object
5.3.3. The Position of the Object
6. Conclusions
- (1)
- The grasping mode of CTSA was studied: the pin array slides up and down to realize the self-adaption to the shape and size of the target object, and then all the pins are gathered to the center to grasp an object.
- (2)
- According to the CTSA mode and the shortage of CTSA hand, a soft robot hand with pin-array structure (CTSA-II hand) was designed and a theoretical model was established. The CTSA-II hand has the characteristics of simple structure and easy assembly. Theoretical modeling analysis shows that CTSA-II can provide sufficient grasping force for conventional small objects, and can be stable when working. The factors affecting the grasping force CTSA-II hand were studied theoretically.
- (3)
- A series of prototypes of CTSA-II hand with different numbers of pins were developed and a large number of gripping experiments were carried out. The CTSA-II hand prototype has the advantages of small size, light weight, and easy assembly. Through a large number of experiments, the CTSA-II has a high degree of fit to the object when grasping the object, sufficient grasping force, high grip reliability, and good fault tolerance rate of the object position information.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- MPG Hand. Available online: https://schunk.com/cn_zh/zhua-qu-xi-tong/series/mpg/ (accessed on 17 February 2019).
- MPZ Hand. Available online: https://schunk.com/cn_zh/zhua-qu-xi-tong/series/mpz/ (accessed on 17 February 2019).
- Salisbury, J.K.; Craig, J.J. Articulated hands: Force control and kinematic issues. Int. J. Robot. Res. 1986, 1, 4–17. [Google Scholar] [CrossRef]
- Jacobsen, S.; Iversen, E.; Knutti, D.; Johnson, R.; Biggers, K. Design of the Utah/MIT Dextrous Hand. IEEE Int. Conf. Robot. Autom. 1986, 3, 1520–1532. [Google Scholar]
- Kawasaki, H. Mechanism Design of Anthropomorphic Robot: Gifu Hand I. J. Robot. Mechatron. 1999, 11, 269–273. [Google Scholar] [CrossRef]
- Kawasaki, H.; Komatsu, T.; Uchiyama, K. Dexterous anthropomorphic robot hand with distributed tactile sensor: Gifu hand II. IEEE/ASME Trans. Mechatron. 2002, 7, 296–303. [Google Scholar] [CrossRef]
- Mouri, T.; Kawasaki, H.; Ito, S.; Shimomura, H. Anthropomorphic Robot Hand: Gifu Hand III. In Proceedings of the International Conference on Control, Automation and Systems, Xiamen, China, 16–19 June 2002; pp. 1288–1293. [Google Scholar]
- Shadow Hand. Available online: https://www.shadowrobot.com/products/dexterous-hand/ (accessed on 17 February 2019).
- Dollar, A.M.; Howe, R.D. The SDM Hand: A highly adaptive compliant grasper for unstructured environments. Springer Tracts Adv. Robot. 2009, 54, 3–11. [Google Scholar]
- Gaiser, I.; Schulz, S.; Kargov, A.; Klosek, H.; Bierbaum, A.; Pylatiuk, C.; Oberle, R.; Werner, T.; Asfo, T. A new anthropomorphic robotic hand. In Proceedings of the Humanoids 2008–8th IEEE-RAS International. Conference on Humanoid Robots, Daejeon, Korea, 1–3 December 2008; pp. 418–422. [Google Scholar]
- Xu, K.; Liu, H.; Du, Y.; Zhu, X. Design of an underactuated anthropomorphic hand with mechanically implemented postural synergies. Adv. Robot. 2014, 28, 1459–1474. [Google Scholar] [CrossRef]
- Zhang, W.; Che, D.; Liu, H.; Ma, X.; Chen, Q.; Du, D.; Sun, Z. Super under-actuated multi-fingered mechanical hand with modular self-adaptive gear-rack mechanism. Ind. Robot Int. J. 2009, 36, 255–262. [Google Scholar] [CrossRef]
- Liang, D.; Song, J.; Zhang, W.; Sun, Z.; Chen, Q. PASA Hand: A novel parallel and self-adaptive underactuated hand with gear-link mechanisms. In International Conference on Intelligent Robotics and Applications; Springer: Berlin, Germany, 2016; pp. 134–146. [Google Scholar]
- Deimel, R.; Brock, O. A Novel Type of Compliant and Underactuated Robotic Hand for Dexterous Grasping; Sage Publications, Inc.: Saunders Oaks, CA, USA, 2016. [Google Scholar]
- Wei, Y.; Zhang, W. OS hand: Octopus-inspired self-adaptive underactuated hand with fluid-driven tentacles and force-changeable artificial muscles. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 7–12. [Google Scholar]
- Miron, G.; Bédard, B.; Plante, J.S. Sleeved Bending Actuators for Soft Grippers: A Durable Solution for High Force-to-Weight Applications. Actuators 2018, 7, 40. [Google Scholar] [CrossRef]
- Viacheslav, S.; Seiji, E.; Pavel, G.; Vladimisky, D. Strategies to Control Performance of 3D-Printed, Cable-Driven Soft Polymer Actuators: From Simple Architectures to Gripper Prototype. Polymers 2018, 10, 846. [Google Scholar]
- Amend, J.R.; Brown, E.; Rodenberg, N.; Jaeger, H.M.; Lipson, H. A positive pressure universal gripper based on the jamming of granular material. IEEE Trans. Robot. 2012, 28, 341–350. [Google Scholar] [CrossRef]
- Nishida, T.; Okatani, Y.; Tadakuma, K. Development of universal robot gripper using mrα fluid. Int. J. Humanoid Robot. 2014, 13, 1650017. [Google Scholar] [CrossRef]
- Zhu, T.; Yang, H.; Zhang, W. A spherical self-adaptive gripper with shrinking of an elastic membrane. In Proceedings of the 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), Macau, China, 18–20 August 2016; pp. 512–517. [Google Scholar]
- FlexShapeGripper. Available online: https://www.festo.com/group/zh/cms/10217.htm (accessed on 17 February 2019).
- Scott, P.B. The ‘Omnigripper’: A form of robot universal gripper. Robotica 1985, 3, 153–158. [Google Scholar] [CrossRef]
- Petterson, A.; Ohlsson, T.; Caldwell, D.G.; Davis, S.T. A bernoulli principle gripper for handling of planar and 3D (food) products. Ind. Robot Int. J. 2010, 37, 518–526. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, H.; Cutkosky, M.R. Design and modeling of linearly-constrained compliant spines for human-scale locomotion on rocky surfaces. Int. J. Robot. Res. 2017, 36, 989–999. [Google Scholar] [CrossRef]
- Hauser, K.; Wang, S.; Cutkosky, M.R. Efficient equilibrium testing under adhesion and anisotropy using empirical contact force models. IEEE Trans. Robot. 2018, 99, 1–13. [Google Scholar] [CrossRef]
- Fu, H.; Yang, H.; Song, W.; Zhang, W. A novel cluster-tube self-adaptive robot hand. Robot. Biomim. 2017, 4, 25. [Google Scholar] [CrossRef] [PubMed]
- Gere, J.M.; Timoshenko, S.P. Mechanics of Materials; China Machine Press: Beijing, China, 2003. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning | Measure |
|---|---|---|
| The elastic modulus of the pin | ||
| The force of base acting on the pin | ||
| The critical force that causes the pin to lose its stability | ||
| The force of a pin acting on the object | ||
| The force of the spring on the pin | ||
| The force acting on the rod from the vertical direction | ||
| The moment of inertia of the pin | ||
| The stiffness factor of the spring | ||
| The length of a pin | ||
| The length of the pin protruding from the base | ||
| The moment of base acting on the pin | ||
| The number of pins | / | |
| The pressure inside the CTSA-II hand | ||
| The pressure outside the CTSA-II hand | ||
| The distribution force of a pin by membrane | ||
| The radius of the membrane that wraps all the pins | ||
| The radius of the pin | ||
| The radius of the target object | ||
| The deformation of the spring | ||
| The abscissa of the target object | ||
| The ordinate of the target object | ||
| The deflection of a pin |
| Length of Pin | Diameter of Pin | Diameter of Membrane | Diameter of Base |
|---|---|---|---|
| 30 mm | 3 mm | 25 mm | 30 mm |
| Components | Bushing | Screws | Spring | Spring in pin |
| Model specification | 3 × 5 × 3, copper | M2 × 12 | 0.3 × 4 × 30 | 0.5 × 3 × 30 |
| Quantity | 8/10/12 | 6 | 8/10/12 | 8/10/12 |
| Components | Screw in pin | membrane | Air compressor | Vacuum generator |
| Model specification | M2 × 6 | 7-inch balloon | WB5500-1A25 | CV-20 |
| Quantity | 8/10/12 | 1 | 1 | 1 |
| Number of pins | 8 | 10 | 12 |
| Mass | 28.522 g | 32.138 g | 34.496 g |
| Full scale | Precision | Stability | Temperature Drift | |
|---|---|---|---|---|
| The 1st sensor | 0–1 MPa | 0.2% FS | 0.1% FS/year | 0.01% FS/℃ |
| The 2nd sensor | −0.1 MPa~0 |
| Offset Distance | 0 mm | 2.5 mm | 5 mm | 7.5 mm | 10 mm | 12.5 mm | 15 mm | |
|---|---|---|---|---|---|---|---|---|
| Number of Pins | ||||||||
| 8 | 100% | 100% | 100% | 100% | 60% | 30% | 10% | |
| 10 | 100% | 100% | 100% | 90% | 70% | 30% | 20% | |
| 12 | 100% | 100% | 100% | 90% | 50% | 20% | 0 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, H.; Zhang, W. The Development of a Soft Robot Hand with Pin-Array Structure. Appl. Sci. 2019, 9, 1011. https://doi.org/10.3390/app9051011
Fu H, Zhang W. The Development of a Soft Robot Hand with Pin-Array Structure. Applied Sciences. 2019; 9(5):1011. https://doi.org/10.3390/app9051011
Chicago/Turabian StyleFu, Hong, and Wenzeng Zhang. 2019. "The Development of a Soft Robot Hand with Pin-Array Structure" Applied Sciences 9, no. 5: 1011. https://doi.org/10.3390/app9051011
APA StyleFu, H., & Zhang, W. (2019). The Development of a Soft Robot Hand with Pin-Array Structure. Applied Sciences, 9(5), 1011. https://doi.org/10.3390/app9051011