Fusion Network for Change Detection of High-Resolution Panchromatic Imagery


Abstract
:1. Introduction
2. Deep Convolutional Network and Related Studies on Change Detection
3. Proposed Fusion Network for Change Detection with Panchromatic Imagery
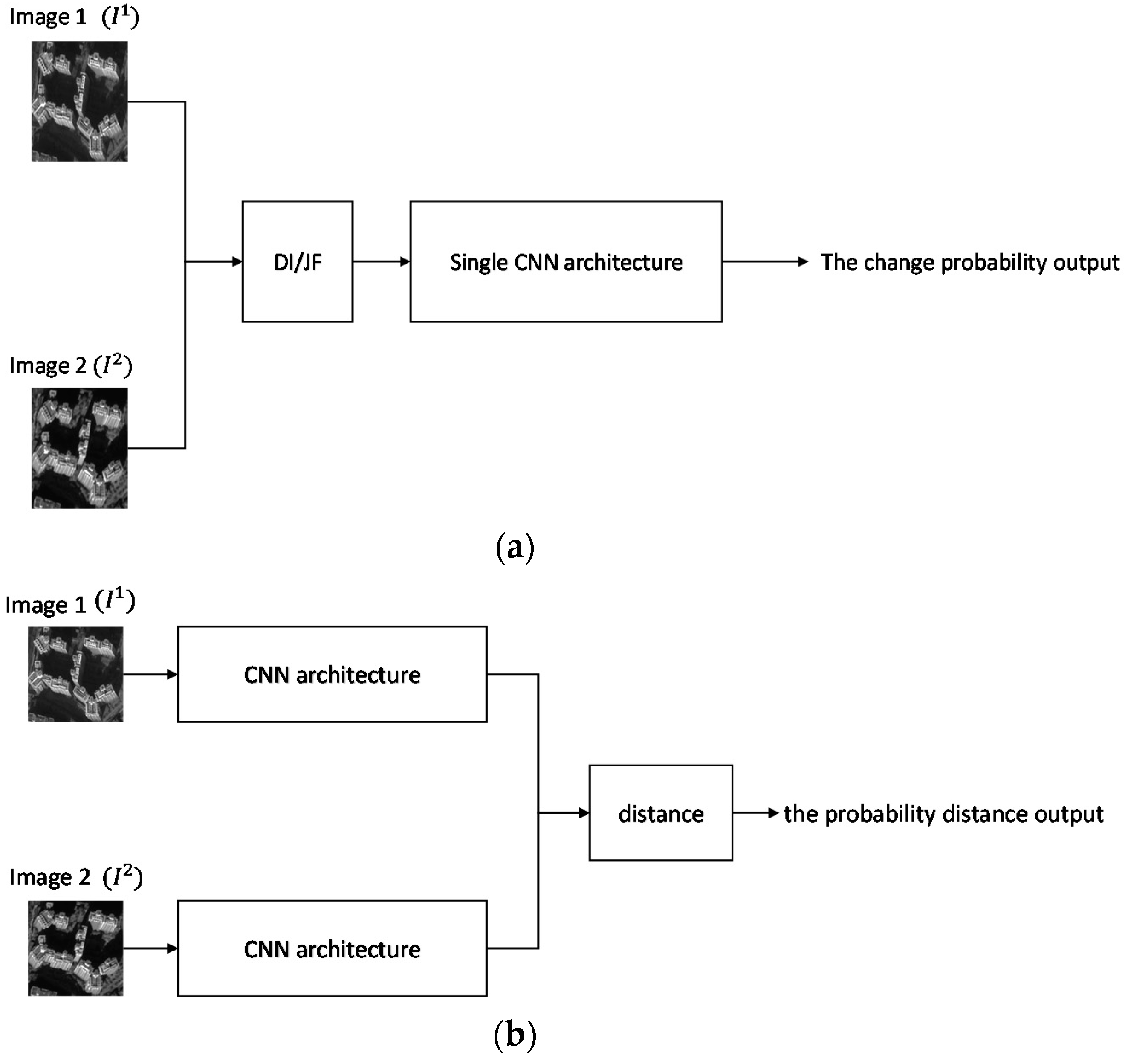
3.1. Fusion Network for Change Detection
3.2. Training of the Proposed Fusion Network for Change Detection
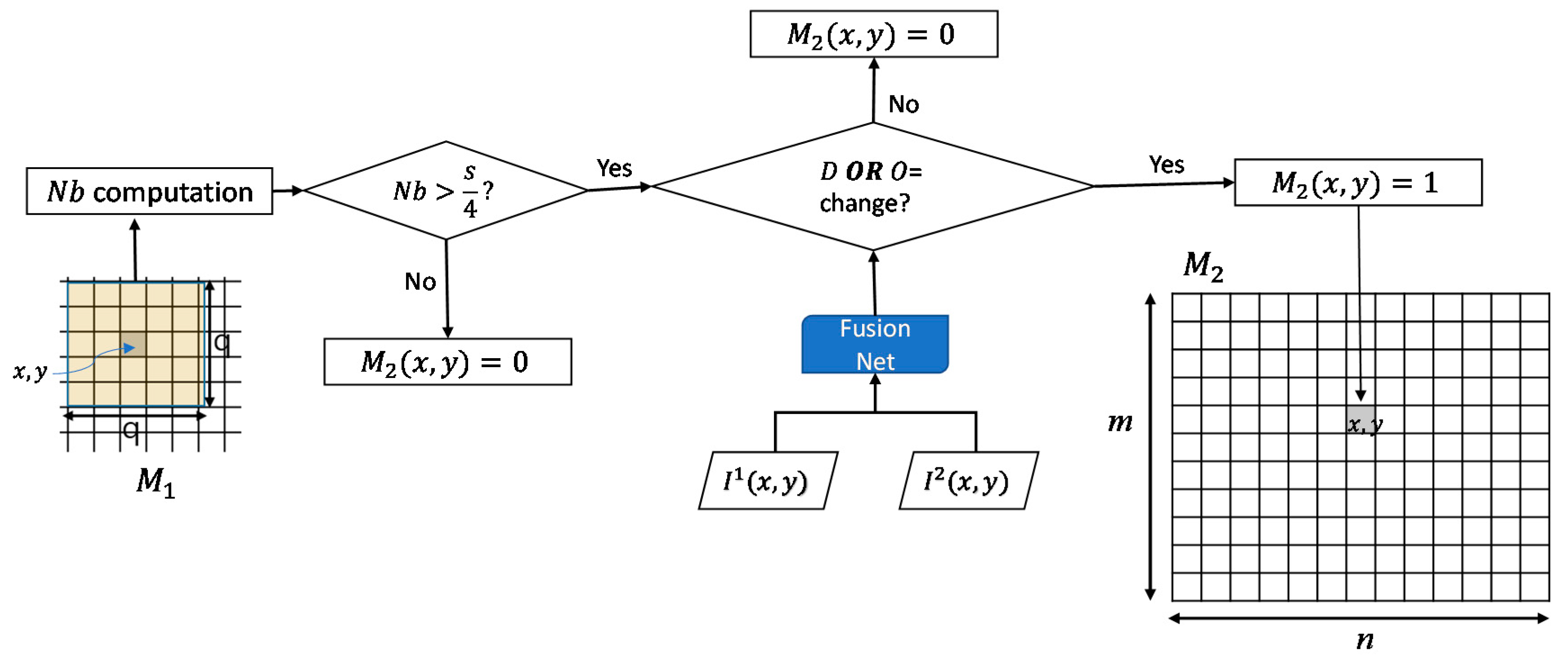
3.3. Dual-Prediction Post-Processing for Change Detection
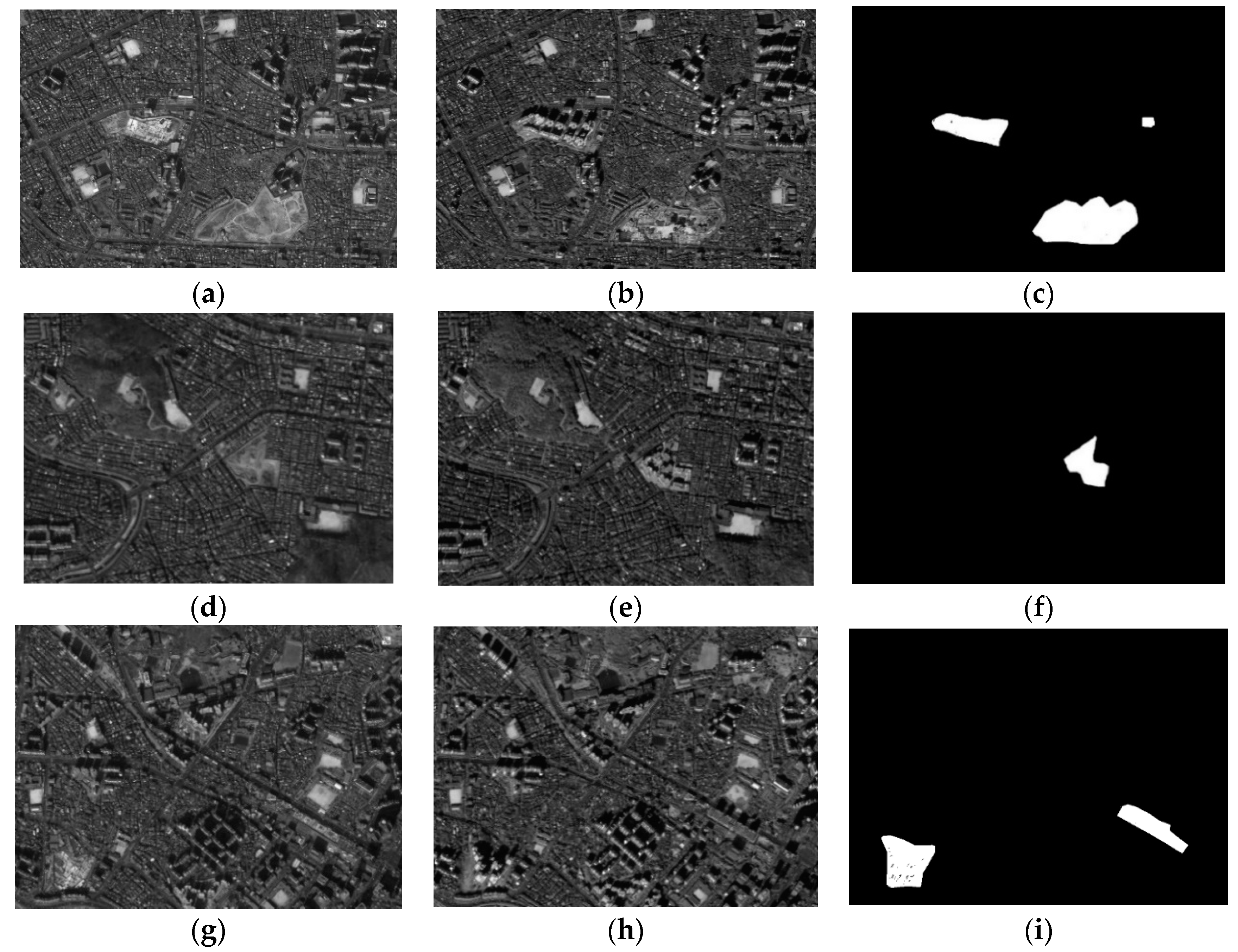
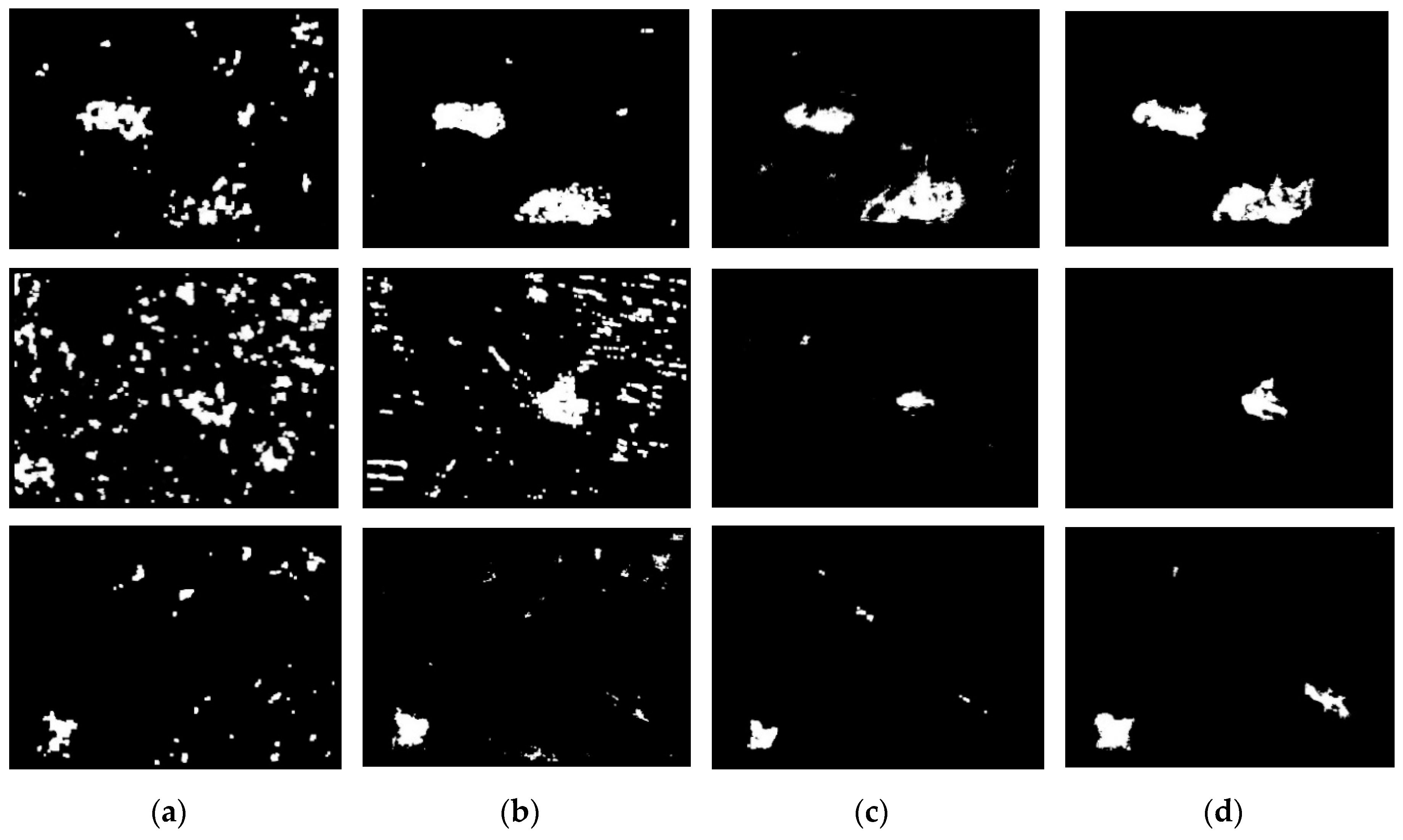
4. Experimental Evaluation and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ciuonzo, D.; Salvo Rossi, P. DECHADE: Detecting slight changes with hard decisions in wireless sensor networks. Int. J. Gen. Syst. 2018, 47, 535–548. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Carotenuto, V.; de Maio, A. On multiple covariance equality testing with application to SAR change detection. IEEE Trans. Signal Proc. 2017, 65, 5078–5091. [Google Scholar] [CrossRef]
- Wahl, D.E.; Yocky, D.A.; Jakowatz, C.V.; Simonson, K.M. A new maximum-likelihood change estimator for two-pass SAR coherent change detection. IEEE Transon. Geosand. Remote Sens. 2016, 54, 2460–2469. [Google Scholar] [CrossRef]
- Coppin, P.R.; Bauer, M.E. Digital change detection in forest ecosystems with remote sensing imagery. Remote Sens. Rev. 1996, 13, 207–234. [Google Scholar] [CrossRef]
- Bazi, Y.; Bruzzone, L.; Melgani, F. Automatic identification of the number and values of decision thresholds in the log-ratio image for change detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2006, 3, 349–353. [Google Scholar] [CrossRef]
- Singh, K.K.; Mehrotra, A.; Nigam, M.J.; Pal, K. Unsupervised change detection from remote sensing using hybrid genetic FCM. In Proceedings of the IEEE 2013 Students Conference on Engineering and Systems (SCES), Allahabad, India, 12–14 April 2013; pp. 1–5. [Google Scholar]
- Bi, C.; Wang, H.; Bao, R. SAR image change detection using regularized dictionary learning and fuzzy clustering. In Proceedings of the 2014 IEEE 3rd International Conference on Cloud Computing and Intelligence Systems (CCIS), Shenzhen, China, 27–29 November 2014; pp. 327–330. [Google Scholar]
- Gong, M.; Zhou, Z.; Ma, J. Change detection in synthetic aperture radar images based on image fusion and fuzzy clustering. IEEE Trans. Image Process. 2012, 21, 2141–2151. [Google Scholar] [CrossRef] [PubMed]
- Gong, M.; Su, L.; Jia, M.; Chen, W. Fuzzy clustering with a modified MRF energy function for change detection in synthetic aperture radar images. IEEE Trans. Fuzzy Syst. 2014, 22, 98–109. [Google Scholar] [CrossRef]
- Johnson, R.D.; Kasischke, E.S. Change vector analysis: A technique for the multispectral monitoring of land cover and condition. Int. J. Remote Sens. 1998, 19, 411–426. [Google Scholar] [CrossRef]
- Gao, F.; Zhang, L.; Wang, J.; Mei, J. Change detection in remote sensing images of damage areas with complex terrain using texture information and SVM. In Proceedings of the International Conference on Circuits and Systems (CAS 2015), Paris, France, 9–10 August 2015. [Google Scholar]
- Guo, Z.; Du, S. Mining parameter information for building extraction and change detection with very high-resolution imagery and GIS data. GISci. Remote Sens. 2017, 54, 38–63. [Google Scholar] [CrossRef]
- Huang, S.; Ramirez, C.; Kennedy, K.; Mallory, J.; Wang, J.; Chu, C. Updating land cover automatically based on change detection using satellite images: Case study of national forests in Southern California. GISci. Remote Sens. 2017, 54, 495–514. [Google Scholar] [CrossRef]
- Hao, M.; Zhang, H.; Shi, W.; Deng, K. Unsupervised change detection using fuzzy c-means and MRF from remotely sensed images. Remote Sens. Lett. 2013, 4, 1185–1194. [Google Scholar] [CrossRef]
- Hao, M.; Hua, Z.; Li, Z.; Chen, B. Unsupervised change detection using a novel fuzzy c-means clustering simultaneously incorporating local and global information. Multimed. Tools Appl. 2017, 76, 20081–20098. [Google Scholar] [CrossRef]
- Habib, T.; Inglada, J.; Mercier, G.; Chanussot, J. Support vector reduction in SVM algorithm for abrupt change detection in remote sensing. IEEE Geosci. Remote Sens. Lett. 2009, 6, 606–610. [Google Scholar] [CrossRef]
- Volpi, M.; Tuia, D.; Bovolo, F.; Kanevski, M.; Bruzzone, L. Supervised change detection in VHR images using contextual information and support vector machines. Int. J. Appl. Earth Obs. Geoinf. 2013, 20, 77–85. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L.; Marconcini, M. A novel approach to unsupervised change detection based on a semisupervised SVM and a similarity measure. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2070–2082. [Google Scholar] [CrossRef]
- Zhao, J.; Gong, M.; Liu, J.; Jiao, L. Deep learning to classify difference image for image change detection. In Proceedings of the IEEE 2014 International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 411–417. [Google Scholar]
- Gong, M.; Yang, H.; Zhang, P. Feature learning and change feature classification based on deep learning for ternary change detection in SAR images. ISPRS J. Photogram. Remote Sens. 2017, 129, 212–225. [Google Scholar] [CrossRef]
- El Amin, A.M.; Liu, Q.; Wang, Y. Convolutional neural network features-based change detection in satellite images. In Proceedings of the First International Workshop on Pattern Recognition, Tokyo, Japan, 11–13 May 2016. [Google Scholar]
- Liu, J.; Gong, M.; Zhao, J.; Li, H.; Jiao, L. Difference representation learning using stacked restricted Boltzmann machines for change detection in SAR images. Soft Comput. 2016, 20, 4645–4657. [Google Scholar] [CrossRef]
- Zhang, H.; Gong, M.; Zhang, P.; Su, L.; Shi, J. Feature-level change detection using deep representation and feature change analysis for multispectral imagery. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1666–1670. [Google Scholar] [CrossRef]
- Lyu, H.; Lu, H.; Mou, L. Learning a transferable change rule from a recurrent neural network for land cover change detection. Remote Sens. 2016, 8, 506. [Google Scholar] [CrossRef]
- Zhan, Y.; Fu, K.; Yan, M.; Sun, X.; Wang, H.; Qiu, X. Change detection based on deep siamese convolutional network for optical aerial images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1845–1849. [Google Scholar] [CrossRef]
- Zhang, W.; Lu, X. The spectral-spatial joint learning for change detection in multispectral imagery. Remote Sens. 2019, 11, 240. [Google Scholar] [CrossRef]
- Zhang, Z.; Vosselman, G.; Gerke, M.; Tuia, D.; Yang, M.Y. Change detection between multimodal remote sensing data using Siamese CNN. arXiv, 2018; arXiv:1807.09562. [Google Scholar]
- Wiratama, W.; Lee, J.; Park, S.E.; Sim, D. Dual-dense convolution network for change detection of high-resolution panchromatic imagery. Appl. Sci. 2018, 8, 1785. [Google Scholar] [CrossRef]
- Yoo, H.-J. Deep convolution neural networks in computer vision. IEIE Trans. Smart Process. Comput. 2015, 4, 35–43. [Google Scholar] [CrossRef]
- Gong, M.; Jiaojiao, Z.; Jia, L.; Qiguang, M.; Jiao, L. Change detection in synthetic aperture radar images based on deep neural networks. IEEE Trans. Neural Net. Learning Sys. 2016, 27, 125–138. [Google Scholar] [CrossRef]
- De, S.; Pirrone, D.; Bovolo, F.; Bruzzone, L.; Bhattacharya, A. A novel change detection framework based on deep learning for the analysis of multi-temporal polarimetric SAR images. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5193–5196. [Google Scholar]
- Wang, Q.; Zhang, X.; Chen, G.; Dai, F.; Gong, Y.; Zhu, K. Change detection based on Faster R-CNN for high-resolution remote sensing images. Remote Sens. Lett 2018, 10, 923–932. [Google Scholar] [CrossRef]
- El Amin, A.M.; Liu, Q.; Wang, Y. Convolutional neural network features based change detection in satellite images. Intern. Soc. Opt. Photonics. 2016, 10011, 100110. [Google Scholar]
- Zhang, P.; Gong, M.; Su, L.; Liu, J.; Li, Z. Change detection based on deep feature representation and mapping transformation for multi-spatial-resolution remote sensing images. ISPRS J. Photo Remote Sens. 2016, 116, 24–41. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Hadsell, R.; Chopra, S.; Le Cun, Y. Dimensionality reduction by learning an invariant mapping. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006. [Google Scholar]
- Viswanathan, R.; Aalo, V. On counting rules in distributed detection. IEEE Trans. Acous. Speech Signal Process. 1989, 37, 772–775. [Google Scholar] [CrossRef] [Green Version]
- Hu, H.; Dey, D.; del Giorno, A.; Hebert, M.; Bagnell, J.A. Log-denseNet: How to sparsify a denseNet. arXiv, 2018; arXiv:1711.00002. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Cropped temporal input image in time 1 and 2, respectively | |
| Patch network 1 and 2 correspond to the back-end network | |
| Patch network 3 correspond to the front-end network | |
| Feature maps of the l-th layer at the r-th dense block and the i-th network | |
| Outputs of , respectively | |
| D | Dissimilarity distance |
| O | Change detection probability output of |
| Incorporation process of a batch normalization (BN), a convolution, and ReLU of the (l−1)-th layer at the r-th dense block and the i-th network | |
| A concatenation of the feature-maps of all of previous layers, layer 0, …, and layer (l − 1) | |
| L | Proposed loss function |
| Contrastive loss function | |
| Weighted binary cross entropy loss function | |
| Y | Ground truth |
| Partial loss function for a pair of similar and dissimilar pixels, respectively | |
| m | Margin value |
| Weighted loss | |
| Proposed weighted function | |
| C and U | Changed and unchanged numbers of pixels, respectively |
| N | The number of full dataset |
| Penalization weights for false-negative and false-positive errors, respectively | |
| Change map for first prediction | |
| Change map for second prediction | |
| Local information of M1 | |
| T | Tested temporal images |
| and | Size of T |
| s | Size of I |
| Algorithm | Area 1 | Area 2 | Area 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AUC | PCC | Kappa | AUC | PCC | Kappa | AUC | PCC | Kappa | |
| DI + CNN | 0.7060 | 0.9458 | 36.8938 | 0.6764 | 0.9571 | 11.8939 | 0.7213 | 0.9855 | 33.2651 |
| JF + CNN | 0.9509 | 0.9775 | 79.7190 | 0.9536 | 0.9570 | 29.7251 | 0.7847 | 0.9732 | 47.6066 |
| Dual-DCN | 0.9878 | 0.9774 | 78.4277 | 0.9546 | 0.9922 | 60.0070 | 0.8515 | 0.9751 | 50.7542 |
| Proposed | 0.9904 | 0.9782 | 80.7942 | 0.9707 | 0.9902 | 65.9929 | 0.9517 | 0.9892 | 78.6898 |
| Network Outputs | Area 1 | Area 2 | Area 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AUC | PCC | Kappa | AUC | PCC | Kappa | AUC | PCC | Kappa | |
| D | 0.9206 | 0.9655 | 65.3497 | 0.8154 | 0.9854 | 33.8273 | 0.8410 | 0.9794 | 55.1115 |
| O | 0.9357 | 0.9607 | 61.9808 | 0.8948 | 0.9879 | 50.0476 | 0.8667 | 0.9436 | 31.3879 |
| Mean | 0.9886 | 0.9781 | 78.4481 | 0.9588 | 0.9875 | 52.7712 | 0.9165 | 0.9803 | 59.5712 |
| SOFN | 0.9685 | 0.9661 | 65.7595 | 0.8903 | 0.9897 | 52.6660 | 0.8658 | 0.9820 | 61.2094 |
| Proposed | 0.9904 | 0.9782 | 80.7942 | 0.9707 | 0.9902 | 65.9929 | 0.9517 | 0.9892 | 78.6898 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wiratama, W.; Sim, D. Fusion Network for Change Detection of High-Resolution Panchromatic Imagery. Appl. Sci. 2019, 9, 1441. https://doi.org/10.3390/app9071441
Wiratama W, Sim D. Fusion Network for Change Detection of High-Resolution Panchromatic Imagery. Applied Sciences. 2019; 9(7):1441. https://doi.org/10.3390/app9071441
Chicago/Turabian StyleWiratama, Wahyu, and Donggyu Sim. 2019. "Fusion Network for Change Detection of High-Resolution Panchromatic Imagery" Applied Sciences 9, no. 7: 1441. https://doi.org/10.3390/app9071441
APA StyleWiratama, W., & Sim, D. (2019). Fusion Network for Change Detection of High-Resolution Panchromatic Imagery. Applied Sciences, 9(7), 1441. https://doi.org/10.3390/app9071441