Towards Intelligent Data Analytics: A Case Study in Driver Cognitive Load Classification




Abstract
:1. Introduction
2. Materials and Methods
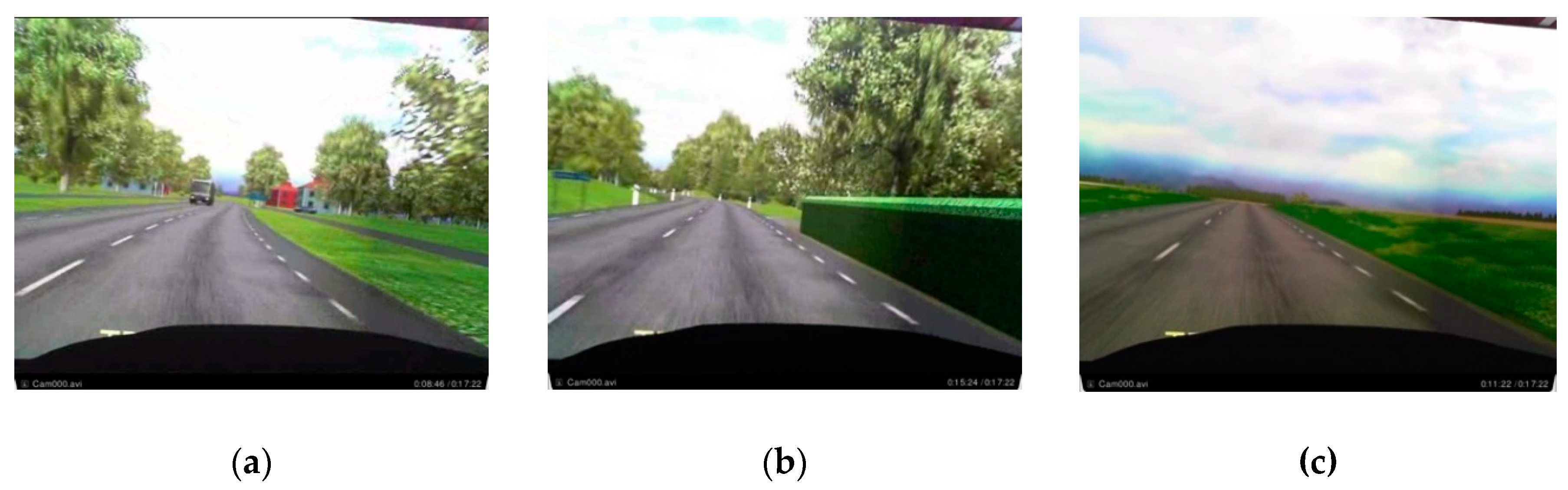
2.1. Study Design and Data Set
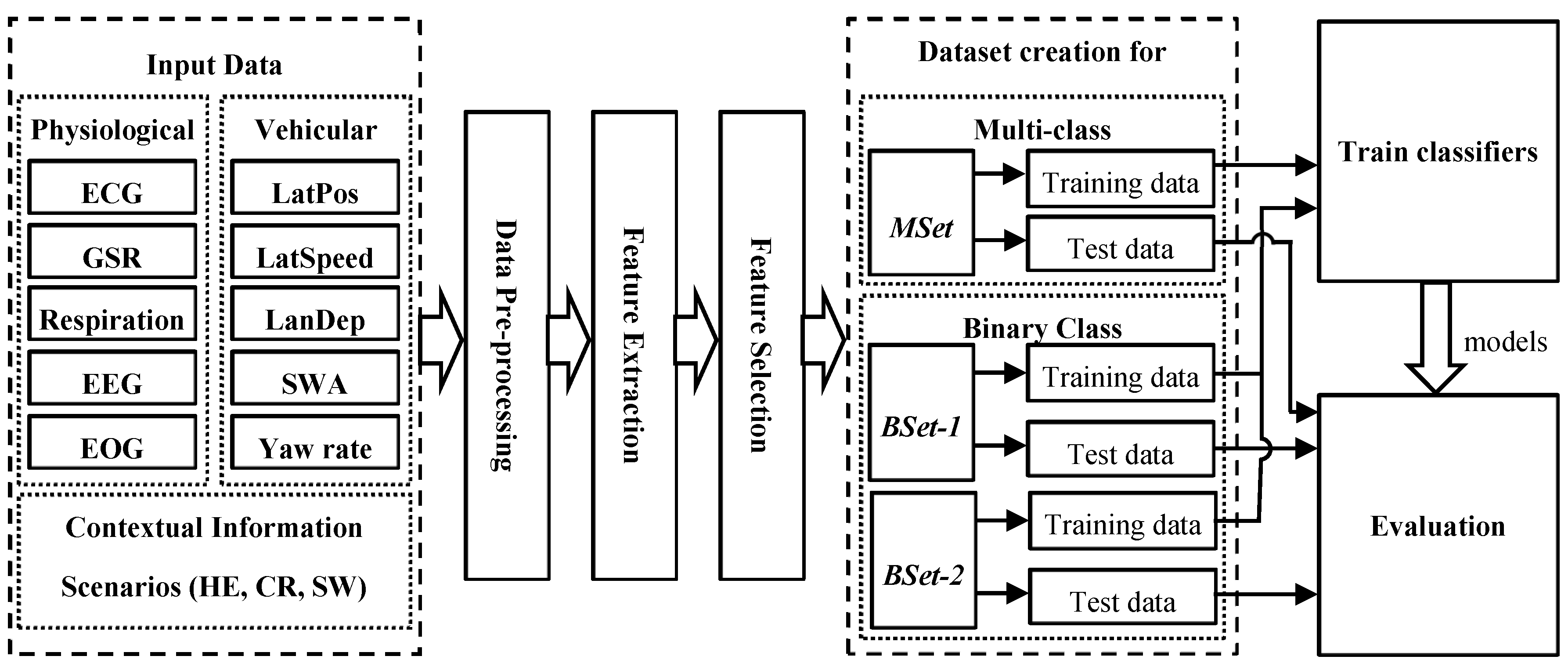
2.2. Classification Approach
2.2.1. Data Pre-Processing
2.2.2. Feature Extraction
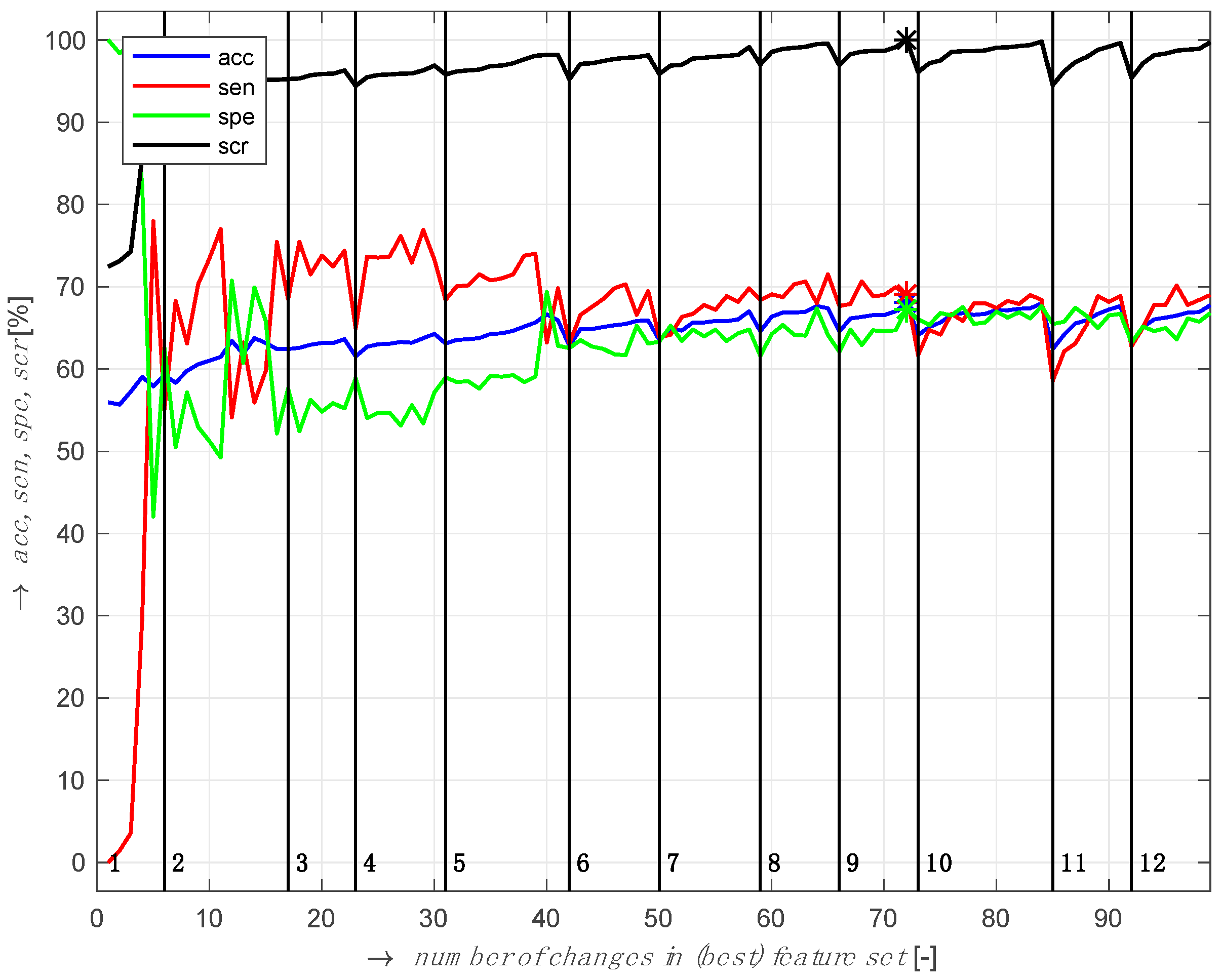
2.2.3. Feature Selection
2.2.4. Cognitive Load Classification
3. Results
3.1. Feature Selection
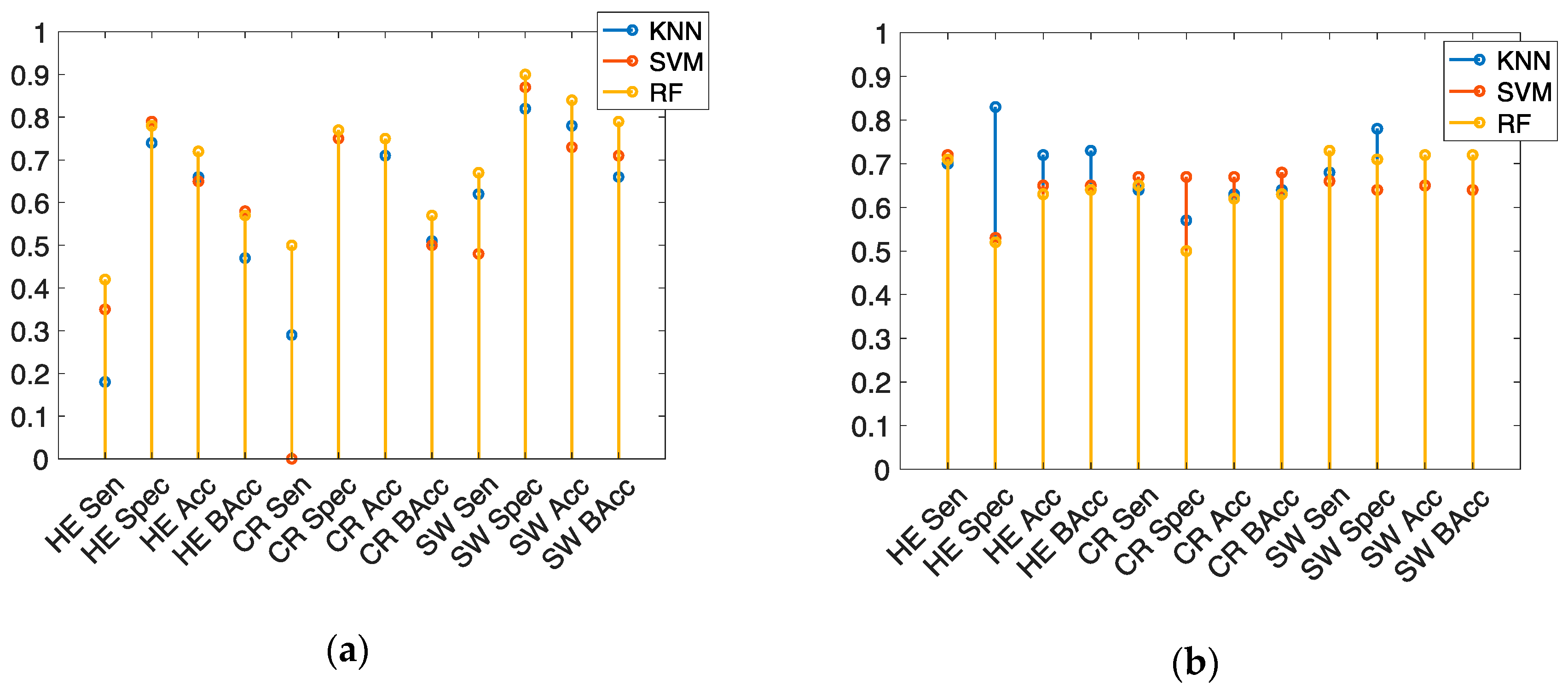
3.2. Classification Evaluation
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gabaude, C.; Baracat, B.; Jallais, C.; Bonniaud, M.; Fort, A. Cognitive load measurement while driving. In Human Factors: A View from an Integrative Perspective, on the Occasion of the Human Factors and Ergonomics Society Europe Chapter Annual Meeting in Toulouse; De Waard, D., Ed.; HFES: Toulouse, France, 2012; pp. 67–80. [Google Scholar]
- Solovey, E.T.; Zec, M.; Perez, E.A.G.; Reimer, B.; Mehler, B. Classifying driver workload using physiological and driving performance data: Two field studies. In Proceedings of the 32nd Annual ACM Conference on Hum. Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; pp. 4057–4066. [Google Scholar]
- Bennakhi, A.; Safar, M. Ambient Technology in Vehicles: The Benefits and Risks. Procedia Comput. Sci. 2016, 83, 1056–1063. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.D. Driving Safety. Rev. Hum. Factors Ergon. 2005, 1, 172–218. [Google Scholar] [CrossRef]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey. In Traffic Safety Facts Crash; Report No. DOT HS 812 115; National Highway Traffic Safety Administration: Washington, DC, USA, 2015. [Google Scholar]
- Lee, J.D.; Boyle, L.N. Is Talking to Your Car Dangerous? It Depends. Hum. Factors J. Hum. Factors Ergon. Soc. 2015, 57, 1297–1299. [Google Scholar] [CrossRef] [PubMed]
- Caird, J.K.; Willness, C.R.; Steel, P.; Scialfa, C. A meta-analysis of the effects of cell phones on driver performance. Accid. Anal. Prev. 2008, 40, 1282–1293. [Google Scholar] [CrossRef] [PubMed]
- Cooper, J.M.; Medeiros-Ward, N.; Strayer, D.L. The impact of eye movements and cognitive workload on lateral position variability in driving. Hum. Factors J. Hum. Factors Ergon. Soc. 2013, 55, 1001–1014. [Google Scholar] [CrossRef] [Green Version]
- Healey, J.; Picard, R. Detecting Stress During Real-World Driving Tasks Using Physiological Sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef] [Green Version]
- Victor, T.; Dozza, M.; Bärgman, J.; Boda, C.-N.; Engström, J.; Flannagan, C.; Lee, J.D.; Markkula, G. Analysis of Naturalistic Driving Study Data: Safer Glances, Driver Inattention, and Crash Risk; Victor, T., Ed.; The National Academy Press: Washington, DC, USA, 2014. [Google Scholar]
- Engström, J.; Markkula, G.; Victor, T.; Merat, N. Effects of Cognitive Load on Driving Performance: The Cognitive Control Hypothesis. Hum. Factors J. Hum. Factors Ergon. Soc. 2017, 59, 734–764. [Google Scholar] [CrossRef]
- Jaeggi, S.M.; Buschkuehl, M.; Perrig, W.J.; Meier, B. The concurrent validity of the N -back task as a working memory measure. Memory 2010, 18, 394–412. [Google Scholar] [CrossRef]
- Kane, M.J.; Conway, A.R.A.; Miura, T.K.; Colflesh, G.J.H. Working memory, attention control, and the n-back task: A question of construct validity. J. Exp. Psychol. Learn. Mem. Cogn. 2007, 33, 615–622. [Google Scholar] [CrossRef] [Green Version]
- Mehler, B.; Reimer, B.; Wang, Y. A comparison of heart rate and heart rate variability indices in distinguishing single-task driving and driving under secondary cognitive workload. In Proceedings of the 6th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design, Olympic Valley-Lake Tahoe, CA, USA, 27–30 June 2011; pp. 590–597. [Google Scholar]
- Kountouriotis, G.K.; Spyridakos, P.; Carsten, O.M.; Merat, N. Identifying cognitive distraction using steering wheel reversal rates. Accid. Anal. Prev. 2016, 96, 39–45. [Google Scholar] [CrossRef]
- Chakraborty, B.; Nakano, K. Automatic detection of driver’s awareness with cognitive task from driving behavior. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 003630–003633. [Google Scholar]
- Yeo, M.V.; Li, X.; Shen, K.; Wilder-Smith, E. Can SVM be used for automatic EEG detection of drowsiness during car driving? Saf. Sci. 2009, 47, 115–124. [Google Scholar] [CrossRef]
- Chen, L.-L.; Zhao, Y.; Ye, P.-F.; Zhang, J.; Zou, J.-Z. Detecting driving stress in physiological signals based on multimodal feature analysis and kernel classifiers. Expert Syst. Appl. 2017, 85, 279–291. [Google Scholar] [CrossRef]
- Hu, S.; Zheng, G. Driver drowsiness detection with eyelid related parameters by Support Vector Machine. Expert Syst. Appl. 2009, 36, 7651–7658. [Google Scholar] [CrossRef]
- Chui, K.T.; Tsang, K.-F.; Chi, H.R.; Wu, C.K.; Ling, B.W.-K. Electrocardiogram based classifier for driver drowsiness detection. In Proceedings of the IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015. [Google Scholar]
- Liang, Y.; Reyes, M.L.; Lee, J.D. Real-Time Detection of Driver Cognitive Distraction Using Support Vector Machines. IEEE Trans. Intell. Transp. Syst. 2007, 8, 340–350. [Google Scholar] [CrossRef]
- Yoshizawa, A.; Nishiyama, H.; Iwasaki, H.; Mizoguchi, F. Machine-learning approach to analysis of driving simulation data. In Proceedings of the IEEE 15th International Conference on Cognitive Informatics & Cognitive Computing (ICCI*CC), Stanford, CA, USA, 22–23 August 2016. [Google Scholar]
- Liao, Y.; Li, S.E.; Li, G.; Wang, W.; Cheng, B.; Chen, F. Detection of driver cognitive distraction: An SVM based real-time algorithm and its comparison study in typical driving scenarios. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016. [Google Scholar]
- Soman, K.; Sathiya, A.; Suganthi, N. Classification of stress of automobile drivers using Radial Basis Function Kernel Support Vector Machine. In Proceedings of the International Conference on Information Communication and Embedded Systems (ICICES2014), Chennai, India, 27–28 February 2014. [Google Scholar]
- Munla, N.; Khalil, M.; Shahin, A.; Mourad, A. Driver stress level detection using HRV analysis. In Proceedings of the International Conference on Advances in Biomedical Engineering (ICABME), Beirut, Lebanon, 16–18 September 2015. [Google Scholar]
- Correa, A.G.; Orosco, L.; Laciar, E. Automatic detection of drowsiness in EEG records based on multimodal analysis. Med. Eng. Phys. 2014, 36, 244–249. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Murphey, Y.L.; Zhao, H. Real Time Drowsiness Detection Based on Lateral Distance Using Wavelet Transform and Neural Network. In Proceedings of the IEEE Symposium Series on Computational Intelligence, Xiamen, China, 6–9 December 2015. [Google Scholar]
- Dwivedi, K.; Biswaranjan, K.; Sethi, A.; Dwivedi, K.; Sethi, A. Drowsy driver detection using representation learning. In Proceedings of the IEEE International Advance Computing Conference (IACC), New Delhi, India, 21–22 February 2014. [Google Scholar]
- Manawadu, U.E.; Kawano, T.; Murata, S.; Kamezaki, M.; Muramatsu, J.; Sugano, S. Multiclass Classification of Driver Perceived Workload Using Long Short-Term Memory based Recurrent Neural Network. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Suzhou, China, 26–30 June 2018. [Google Scholar]
- El Haouij, N.; Poggi, J.-M.; Ghozi, R.; Sevestre-Ghalila, S.; Jaidane, M. Random forest-based approach for physiological functional variable selection for driver’s stress level classification. J. Ital. Stat. Soc. 2018, 28, 157–185. [Google Scholar] [CrossRef]
- Yoshida, Y.; Ohwada, H.; Mizoguchi, F. Extracting tendency and stability from time series and random forest for classifying a car driver’s cognitive load. In Proceedings of the IEEE 13th International Conference on Cognitive Informatics and Cognitive Computing, London, UK, 18–20 August 2014; pp. 258–265. [Google Scholar]
- Sarkar, P.; Ross, K.; Ruberto, A.J.; Rodenbura, D.; Hungler, P.; Etemad, A. Classification of Cognitive Load and Expertise for Adaptive Simulation using Deep Multitask Learning. In Proceedings of the 8th International Conference on Affective Computing and Intelligent Interaction (ACII), Cambridge, UK, 3–6 September 2019. [Google Scholar]
- Saha, A.; Minz, V.; Bonela, S.; Sreeja, S.R.; Chowdhury, R.; Samanta, D. Classification of EEG Signals for Cognitive Load Estimation Using Deep Learning Architectures; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Begum, S.; Ahmed, M.; Funk, P.; Xiong, N.; Von Schéele, B. Using Calibration and Fuzzification of Cases for Improved Diagnosis and Treatment of Stress; ECCBR: Vasteras, Sweden, 2006. [Google Scholar]
- Begum, S.; Barua, S.; Filla, R.; Ahmed, M.U. Classification of physiological signals for wheel loader operators using Multi-scale Entropy analysis and case-based reasoning. Expert Syst. Appl. 2014, 41, 295–305. [Google Scholar] [CrossRef]
- Begum, S.; Ahmed, M.U.; Funk, P.; Filla, R. Mental state monitoring system for the professional drivers based on Heart Rate Variability analysis and Case-Based Reasoning. In Proceedings of the Computer Science and Information Systems Federated Conference (FedCSIS), Wroclaw, Poland, 9–12 September 2012; pp. 35–42. [Google Scholar]
- Barua, S.; Ahmed, M.U.; Begum, S. Classifying Drivers’ Cognitive Load Using EEG Signals. Stud. Health Technol. Inform. 2017, 237, 99–106. [Google Scholar]
- De Naurois, C.J.; Bourdin, C.; Stratulat, A.; Diaz, E.; Vercher, J.-L. Detection and prediction of driver drowsiness using artificial neural network models. Accid. Anal. Prev. 2019, 126, 95–104. [Google Scholar] [CrossRef]
- Kartsch, V.J.; Benatti, S.; Schiavone, P.D.; Rossi, D.; Benini, L. A sensor fusion approach for drowsiness detection in wearable ultra-low-power systems. Inf. Fusion 2018, 43, 66–76. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Zhou, J.; Wang, Y.; Yu, K.; Arshad, S.Z.; Khawaji, A.; Conway, D. Galvanic Skin Response-Based Measures. In Creativity and Rationale; Springer International Publishing: Cham, Switzerland, 2016; pp. 87–99. [Google Scholar]
- Barua, S.; Ahmed, M.U.; Ahlstrom, C.; Begum, S.; Funk, P. Automated EEG Artifact Handling With Application in Driver Monitoring. IEEE J. Biomed. Health Inform. 2017, 22, 1350–1361. [Google Scholar] [CrossRef] [PubMed]
- Stone, D.C. Application of median filtering to noisy data. Can. J. Chem. 1995, 73, 1573–1581. [Google Scholar] [CrossRef]
- Nygårds, M.-E.; Sörnmo, L. Delineation of the QRS complex using the envelope of the e.c.g. Med. Boil. Eng. 1983, 21, 538–547. [Google Scholar] [CrossRef] [PubMed]
- Afonso, V.; Tompkins, W.J.; Nguyen, T.; Luo, S. ECG beat detection using filter banks. IEEE Trans. Biomed. Eng. 1999, 46, 192–202. [Google Scholar] [CrossRef] [PubMed]
- Kaufmann, T.; Sütterlin, S.; Schulz, S.M.; Vögele, C. ARTiiFACT: A tool for heart rate artifact processing and heart rate variability analysis. Behav. Res. Methods 2011, 43, 1161–1170. [Google Scholar] [CrossRef]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef] [Green Version]
- Jap, B.T.; Lal, S.; Fischer, P.; Bekiaris, E. Using EEG spectral components to assess algorithms for detecting fatigue. Expert Syst. Appl. 2009, 36, 2352–2359. [Google Scholar] [CrossRef]
- Borghini, G.; Astolfi, L.; Vecchiato, G.; Mattia, D.; Babiloni, C. Measuring neurophysiological signals in aircraft pilots and car drivers for the assessment of mental workload, fatigue and drowsiness. Neurosci. Biobehav. Rev. 2014, 44, 58–75. [Google Scholar] [CrossRef]
- Gevins, A.; E Smith, M. Neurophysiological measures of cognitive workload during human-computer interaction. Theor. Issues Ergon. Sci. 2003, 4, 113–131. [Google Scholar] [CrossRef]
- Hagemann, K. The alpha band as an electrophysiological indicator for internalized attention and high mental workload in real traffic driving. In Mathematics and Natural Sciences; Heinrich-Heine University of Dusseldorf: Dusseldorf, Germany, 2008. [Google Scholar]
- Demanuele, C.; Broyd, S.J.; Sonuga-Barke, E.J.; James, C. Neuronal oscillations in the EEG under varying cognitive load: A comparative study between slow waves and faster oscillations. Clin. Neurophysiol. 2013, 124, 247–262. [Google Scholar] [CrossRef] [Green Version]
- Dasari, D.; Shou, G.; Ding, L. ICA-Derived EEG Correlates to Mental Fatigue, Effort, and Workload in a Realistically Simulated Air Traffic Control Task. Front. Mol. Neurosci. 2017, 11, 297. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gupta, A.; Parameswaran, S.; Lee, C.-H. Classification of electroencephalography (EEG) signals for different mental activities using Kullback Leibler (KL) divergence. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Taipei, Taiwan, 19–24 April 2009. [Google Scholar]
- Wang, Z.; Hope, R.M.; Wang, Z.; Ji, Q.; Gray, W.D. An EEG workload classifier for multiple subjects. In Proceedings of the IEEE International Conference on Engineering in Medicine, Biology and Society (EMBC), Boston, MA, USA, 30 August–3 September 2011. [Google Scholar]
- Jammes, B.; Sharabaty, H.; Estève, D. Automatic EOG analysis: A first step toward automatic drowsiness scoring during wake-sleep transitions. Somnol. Schlafforschung Schlafmed. 2008, 12, 227–232. [Google Scholar] [CrossRef]
- Nakano, T.; Kato, M.; Morito, Y.; Itoi, S.; Kitazawa, S. Blink-related momentary activation of the default mode network while viewing videos. Proc. Natl. Acad. Sci. USA 2013, 110, 702–706. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Recarte, M.A.; Pérez, E.; Conchillo, A.; Nunes, L.M. Mental workload and visual impairment: Differences between pupil, blink, and subjective rating. Span. J. Psychol. 2008, 11, 374–385. [Google Scholar] [CrossRef] [Green Version]
- Wascher, E.; Heppner, H.; Möckel, T.; Kobald, S.O.; Getzmann, S. Eye-blinks in choice response tasks uncover hidden aspects of information processing. EXCLI J. 2015, 14, 1207–1218. [Google Scholar]
- Benedetto, S.; Pedrotti, M.; Minin, L.; Baccino, T.; Re, A.; Montanari, R. Driver workload and eye blink duration. Transp. Res. Part F Traffic Psychol. Behav. 2011, 14, 199–208. [Google Scholar] [CrossRef]
- Föhr, T.; Tolvanen, A.; Myllymäki, T.; Järvelä-Reijonen, E.; Rantala, S.; A Korpela, R.; Peuhkuri, K.; Kolehmainen, M.; Puttonen, S.; Lappalainen, R.; et al. Subjective stress, objective heart rate variability-based stress, and recovery on workdays among overweight and psychologically distressed individuals: A cross-sectional study. J. Occup. Med. Toxicol. 2015, 10, 39. [Google Scholar] [CrossRef] [Green Version]
- Reisman, S. Measurement of physiological stress. In Proceedings of the IEEE 23rd Northeast Bioengineering Conference, Durham, NH, USA, 21–22 May 1997. [Google Scholar]
- Schumacher, A. Linear and Nonlinear Approaches to the Analysis of R-R Interval Variability. Boil. Res. Nurs. 2004, 5, 211–221. [Google Scholar] [CrossRef]
- Brookhuis, K.A.; De Waard, D. Monitoring drivers’ mental workload in driving simulators using physiological measures. Accid. Anal. Prev. 2010, 42, 898–903. [Google Scholar] [CrossRef]
- Cinaz, B.; Arnrich, B.; La Marca, R.; Tröster, G. Monitoring of mental workload levels during an everyday life office-work scenario. Pers. Ubiquitous Comput. 2011, 17, 229–239. [Google Scholar] [CrossRef]
- Muthukrishnan, S.; Gurja, J.; Sharma, R. Does heart rate variability predict human cognitive performance at higher memory loads? Ind. J. Physiol. Pharmacol. 2017, 61, 14–22. [Google Scholar]
- Togo, F.; Takahashi, M. Heart Rate Variability in Occupational Health—A Systematic Review. Ind. Health 2009, 47, 589–602. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nourbakhsh, N.; Wang, Y.; Chen, F. GSR and Blink Features for Cognitive Load Classification. In Human-Computer Interaction—INTERACT 2013; Kotzé, P., Ed.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 159–166. [Google Scholar]
- Nourbakhsh, N.; Wang, Y.; Chen, F.; Calvo, R.A. Using galvanic skin response for cognitive load measurement in arithmetic and reading tasks. In Proceedings of the 24th Australian Computer-Human Interaction Conference (ACM), Melbourne, Australia, 26–30 November 2012; pp. 420–423. [Google Scholar]
- Boucsein, W. Electrodermal Activity; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Ikehara, C.; Crosby, M. Assessing cognitive load with physiological sensors. In Proceedings of the 38th IEEE Annual Hawaii International Conference on System Sciences, Big Island, HI, USA, 3–6 January 2005. [Google Scholar]
- Shi, Y.; Ruiz, N.; Taib, R.; Choi, E.; Chen, F. Galvanic skin response (GSR) as an index of cognitive load. CHI ’07 Ext. Abstr. 2007, 2651–2656. [Google Scholar] [CrossRef]
- Hidalgo-Muñoz, A.R.; Béquet, A.J.; Astier-Juvenon, M.; Pépin, G.; Fort, A.; Jallais, C.; Tattegrain, H.; Gabaude, C. Respiration and Heart Rate Modulation Due to Competing Cognitive Tasks While Driving. Front. Hum. Neurosci. 2019, 12, 525. [Google Scholar] [CrossRef]
- Veltman, J.; Gaillard, A.W.K. Physiological workload reactions to increasing levels of task difficulty. Ergonomics 1998, 41, 656–669. [Google Scholar] [CrossRef] [PubMed]
- Grassmann, M.; Vlemincx, E.; Von Leupoldt, A.; Mittelstaedt, J.; Bergh, O.V.D. Respiratory Changes in Response to Cognitive Load: A Systematic Review. Neural Plast. 2016, 2016, 8146809. [Google Scholar] [CrossRef] [Green Version]
- Sandberg, D.; Kecklund, G.; Wahde, M.; Åkerstedt, T.; Anund, A. Detecting Driver Sleepiness Using Optimized Nonlinear Combinations of Sleepiness Indicators. IEEE Trans. Intell. Transp. Syst. 2010, 12, 97–108. [Google Scholar] [CrossRef]
- Cleveland, W.S. Robust Locally Weighted Regression and Smoothing Scatterplots. J. Am. Stat. Assoc. 1979, 74, 829–836. [Google Scholar] [CrossRef]
- Nakayama, O.; Futami, T.; Nakamura, T.; Boer, E.R. Development of a Steering Entropy Method for Evaluating Driver Workload. SAE Tech. Pap. Ser. 1999, 1, 1686–1695. [Google Scholar] [CrossRef] [Green Version]
- Kersloot, T.; Flint, A.; Parkes, A. Steering Entropy as a Measure of Impairment. In Presented during the Young Researchers Seminar; TRL Limited: Berkshire, UK, 2003. [Google Scholar]
- Lewis-Evans, B.; De Waard, D.; Brookhuis, K.A. Speed maintenance under cognitive load—Implications for theories of driver behaviour. Accid. Anal. Prev. 2011, 43, 1497–1507. [Google Scholar] [CrossRef] [Green Version]
- Östlund, J.; Nilsson, L.; Carsten, O.; Merat, N.; Jamson, S.; Janssen, W.; Mouta, S.; Carvalhais, J.; SANTOS, J.; Anttila, V.; et al. Deliverable 2-HMI and Safety-related Driver Performance. In Human Machine Interface and the Safety of Traffic in Europe (HASTE) Project; EC: Geneva, Switzerland, 2004. [Google Scholar]
- Engström, J. Understanding Attention Selection in Driving: From Limited Capacity to Adaptive Behaviour in Vehicle Safety Division, Department of Applied Mechanics; Chalmers University of Technology: Gothenburg, Sweden, 2011. [Google Scholar]
- Wilschut, E.S. The Impact of In-Vehicle Information Systems on Simulated Driving Performance, Effects of Age, Timing and Display Characteristics; University of Groningen: Groningen, The Netherlands, 2009. [Google Scholar]
- Apparies, R.J.; Riniolo, T.C.; Porges, S.W. A psychophysiological investigation of the effects of driving longer-combination vehicles. Ergonomics 1998, 41, 581–592. [Google Scholar] [CrossRef] [PubMed]
- Whitney, A. A Direct Method of Nonparametric Measurement Selection. IEEE Trans. Comput. 1971, 20, 1100–1103. [Google Scholar] [CrossRef]
- Mekyska, J.; Galaz, Z.; Mzourek, Z.; Smekal, Z.; Rektorova, I.; Eliasova, I.; Kostalova, M.; Mrackova, M.; Berankova, D.; Faundez-Zanuy, M.; et al. Assessing progress of Parkinson’s disease using acoustic analysis of phonation. In Proceedings of the 4th International Work Conference on Bioinspired Intelligence (IWOBI), San Sebastian, Spain, 10–12 June 2015; pp. 111–118. [Google Scholar]
- Pudil, P.; Novovicova, J.; Kittler, J. Floating search methods in feature selection. Pattern Recognit. Lett. 1994, 15, 1119–1125. [Google Scholar] [CrossRef]
- Hong, H.; Xiaoling, G.; Hua, Y. Variable selection using Mean Decrease Accuracy and Mean Decrease Gini based on Random Forest. In Proceedings of the 7th IEEE International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 26–28 August 2016. [Google Scholar]
- Nilsson, E.; Ahlström, C.; Barua, S.; Fors, C.; Lindén, P.; Svanberg, B.; Begum, S.; Ahmed, M.U.; Anund, A. Vehicle Driver Monitoring: Sleepiness and Cognitive Load; VTI Rapport; Statens Väg-Och Transportforskningsinstitut: Linköping, Sweden, 2017; p. 66. [Google Scholar]
- Larose, D.T. k-Nearest Neighbor Algorithm. In Discovering Knowledge in Data; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005; pp. 90–106. [Google Scholar]
- Vapnik, V.N. Principles of Risk Minimization for Learning Theory. Adv. Neural Inform. Process. Syst. 1992, 4, 831–838. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar]
- McDonald, A.D.; Lee, J.D.; Schwarz, C.; Brown, T.L. Steering in a random forest: Ensemble learning for detecting drowsiness-related lane departures. Hum. Factors J. Hum. Factors Ergon. Soc. 2014, 56, 986–998. [Google Scholar] [CrossRef]
- Kircher, K.; Ahlstrom, C. Minimum Required Attention: A Human-Centered Approach to Driver Inattention. Hum. Factors J. Hum. Factors Ergon. Soc. 2016, 59, 471–484. [Google Scholar] [CrossRef] [PubMed]
- Horrey, W.J.; Lesch, M.F. Driver-initiated distractions: Examining strategic adaptation for in-vehicle task initiation. Accid. Anal. Prev. 2009, 41, 115–122. [Google Scholar] [CrossRef]
- Engström, J.; Johansson, E.; Östlund, J. Effects of visual and cognitive load in real and simulated motorway driving. Transp. Res. Part F Traffic Psychol. Behav. 2005, 8, 97–120. [Google Scholar] [CrossRef]
- May, J.F.; Baldwin, C.L. Driver fatigue: The importance of identifying causal factors of fatigue when considering detection and countermeasure technologies. Transp. Res. Part F Traffic Psychol. Behav. 2009, 12, 218–224. [Google Scholar] [CrossRef]
- Ilkowska, M.; Engle, R.W. Working memory capacity and self-regulation. In Handbook of Personality and Self-Regulation; APA: Washington, DC, USA, 2010; pp. 263–290. [Google Scholar]
- Tjolleng, A.; Jung, K.; Hong, W.; Lee, W.; Lee, B.; You, H.; Son, J.; Park, S. Classification of a Driver’s cognitive workload levels using artificial neural network on ECG signals. Appl. Ergon. 2017, 59, 326–332. [Google Scholar] [CrossRef] [PubMed]
- Conway, D.; Dick, I.; Li, Z.; Wang, Y.; Chen, F. The Effect of Stress on Cognitive Load Measurement. In Human-Computer Interaction—INTERACT 2013; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Cici, R.; Högman, L.; Patten, C. Measures of Driver Behavior and Cognitive Workload in a Driving Simulator and in a Real Traffic Environment-Experiences from Two Experimental Studies in Sweden. In Proceedings of the First International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, Aspen, CO, USA, 14–17 August 2001; pp. 137–142. [Google Scholar]
- Pauzié, A. A method to assess the driver mental workload: The driving activity load index (DALI). IET Intell. Transp. Syst. 2008, 2, 315. [Google Scholar] [CrossRef]
- Barua, S. Multivariate Data Analytics to Identify Driver’s Sleepiness, Cognitive Load and Stress; Mälardalen University: Vasteras, Sweden, 2019. [Google Scholar]
- Wilhelm, O.; Hildebrandt, A.H.; Oberauer, K. What is working memory capacity, and how can we measure it? Front. Psychol. 2013, 4, 4. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, C.-Y.; Huang, C.-K. Working-memory evaluation based on EEG signals during n-back tasks. J. Integr. Neurosci. 2018, 17, 695–707. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | # Features | Extracted Features |
|---|---|---|
| EEG | 270 | Frequency bands: δ (<4 Hz), θ (4–7 Hz), α (8–12 Hz), β (12–30 Hz), γ (31–50 Hz), and the ratio , , , and |
| EOG | 9 | Start position of blink, blink duration calculated from the start position of blink to the end value of blink, lid closure speed, PCV (peak closing velocity), delay of eye lid reopening, duration at 80%, PERCLOS, blink rate, blink count. |
| ECG | 14 | Time: Mean heart rate (meanHR), standard deviation of heart rate (sdHR), standard deviations of normal to normal RR intervals (SDNN), root mean square of successive differences between adjacent NN intervals (RMSSD), number of pairs of successive NN intervals with more than 50 ms (NN50), percentage of NN50 (pNN50). |
| Frequency: Low frequency power (0.04–0.15 Hz), high frequency power (0.15–0.4 Hz), total power, LF/HF ratio. | ||
| Non-linear: Alpha value of detrended fluctuation analysis (dfaAlpha), sample entropy (SampEn), approximate entropy (ApEn), and permutation entropy (PeEn). | ||
| GSR | 10 | Time: Number of peaks, the amplitude of the peaks (maxima-minima), duration of the rise time of each peak, index of the detected peaks in the GSR signal, mean value, standard deviation, first quartile value, third quartile value, slope value between peak and valley. |
| Frequency: Average power of the signal under 1 Hz. | ||
| Respiration rate (RR) | 9 | Time: Mean value, standard deviation, kurtosis. |
| Frequency: Power spectra power between the frequency ranges [0, 0.1], [0.1, 0.2], [0.2, 0.3], [0.3, 0.4], [0.4, 0.7], and [0.7, 1]. | ||
| Vehicular parameters | 11 | Standard deviation of lateral position, mean squared error of lateral position. |
| Standard deviation of steering wheel angle, steering wheel entropy, steering wheel reversal rate, high frequency component (0.3 Hz), number of zero crossings. | ||
| Lanex or fraction of lane exit from lane departure. | ||
| Standard deviation of lateral speed, yaw and yaw rate. |
| Data | # Extracted Features | # Selected Features | Features |
|---|---|---|---|
| EEG | 270 | 11 | FP1: , FP2: , |
| FP2: , | |||
| FPz: , , | |||
| F4: | |||
| F7: | |||
| FC2: , | |||
| EOG | 9 | 5 | Start position of blink, blink duration calculated from the start position of blink to the end value of blink, PERCLOS, blink rate, blink count. |
| ECG | 14 | 9 | Time: sdHR, SDNN, NN50, pNN50. |
| Frequency: LF, HF, LF/HF ratio. | |||
| Non-linear: dfaAlpha, SampEn. | |||
| GSR | 10 | 4 | Time: The amplitude of the peaks, duration of the rise time of each peak, mean value. |
| Frequency: Average power of the signal under 1 Hz. | |||
| RR | 9 | 7 | Time: Mean value, standard deviation, kurtosis. |
| Frequency: Power spectra power between the frequency ranges [0, 0.1], [0.2, 0.3], [0.4, 0.7], and [0.7, 1]. | |||
| Vehicular data | 11 | 6 | Standard deviation of lateral speed. |
| Standard deviation of lateral speed yaw. | |||
| Steering wheel entropy, high frequency component (0.3 Hz), and number of zero crossings. | |||
| Lanex or fraction of lane exit from lane departure. | |||
| All | 323 | 42 | Best subset of features after feature selection. |
| Predicted Class | Actual Class | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| k-NN | SVM | RF | |||||||
| Baseline | 1-back | 2-back | Baseline | 1-back | 2-back | Baseline | 1-back | 2-back | |
| Baseline | 60 (65%) | 18 (20%) | 14 (15%) | 66 (72%) | 13 (14%) | 13 (14%) | 70 (76%) | 15 (16%) | 7 (8%) |
| 1-back | 24 (34%) | 39 (56%) | 7 (10%) | 22 (31%) | 39 (56%) | 9 (13%) | 24 (34%) | 36 (51%) | 10 (14%) |
| 2-back | 13 (25%) | 19 (35%) | 21 (40%) | 16 (30%) | 12 (23%) | 25 (47%) | 13 (25%) | 8 (15%) | 32 (60%) |
| Criteria | k-NN | SVM | RF | ||||||
|---|---|---|---|---|---|---|---|---|---|
| BL | 1-back | 2-back | BL | 1-back | 2-back | BL | 1-back | 2-back | |
| TP | 60 | 39 | 21 | 66 | 39 | 25 | 70 | 36 | 32 |
| FP | 32 | 31 | 32 | 26 | 31 | 28 | 22 | 34 | 21 |
| FN | 37 | 37 | 21 | 38 | 25 | 22 | 37 | 23 | 17 |
| TN | 86 | 108 | 141 | 85 | 120 | 140 | 86 | 122 | 145 |
| PRE | 0.65 | 0.56 | 0.40 | 0.72 | 0.56 | 0.47 | 0.76 | 0.51 | 0.60 |
| SEN | 0.62 | 0.51 | 0.50 | 0.63 | 0.61 | 0.53 | 0.65 | 0.61 | 0.65 |
| SPE | 0.73 | 0.78 | 0.82 | 0.77 | 0.79 | 0.83 | 0.80 | 0.78 | 0.87 |
| BACC | 0.68 | 0.65 | 0.63 | 0.70 | 0.69 | 0.67 | 0.73 | 0.68 | 0.75 |
| F1-score | 0.63 | 0.53 | 0.13 | 0.67 | 0.58 | 0.50 | 0.70 | 0.56 | 0.63 |
| MCC | 0.35 | 0.30 | 0.44 | 0.40 | 0.39 | 0.35 | 0.46 | 0.37 | 0.51 |
| Criteria | BSet-1 | BSet-2 | ||||
|---|---|---|---|---|---|---|
| k-NN | SVM | RF | k-NN | SVM | RF | |
| Task group (P) | 52 | 52 | 52 | 126 | 126 | 126 |
| Baseline group (N) | 163 | 163 | 163 | 89 | 89 | 89 |
| TP | 20 | 27 | 38 | 116 | 104 | 107 |
| FP | 8 | 10 | 11 | 47 | 43 | 36 |
| FN | 32 | 25 | 14 | 10 | 22 | 19 |
| TN | 155 | 153 | 152 | 42 | 46 | 53 |
| Sensitivity | 0.38 | 0.52 | 0.78 | 0.92 | 0.83 | 0.84 |
| Specificity | 0.95 | 0.86 | 0.91 | 0.47 | 0.52 | 0.60 |
| Accuracy | 0.81 | 0.84 | 0.88 | 0.73 | 0.70 | 0.74 |
| BACC | 0.67 | 0.73 | 0.85 | 0.70 | 0.67 | 0.72 |
| F1-score | 0.50 | 0.61 | 0.75 | 0.80 | 0.76 | 0.80 |
| MCC | 0.43 | 0.52 | 0.68 | 0.45 | 0.36 | 0.46 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barua, S.; Ahmed, M.U.; Begum, S. Towards Intelligent Data Analytics: A Case Study in Driver Cognitive Load Classification. Brain Sci. 2020, 10, 526. https://doi.org/10.3390/brainsci10080526
Barua S, Ahmed MU, Begum S. Towards Intelligent Data Analytics: A Case Study in Driver Cognitive Load Classification. Brain Sciences. 2020; 10(8):526. https://doi.org/10.3390/brainsci10080526
Chicago/Turabian StyleBarua, Shaibal, Mobyen Uddin Ahmed, and Shahina Begum. 2020. "Towards Intelligent Data Analytics: A Case Study in Driver Cognitive Load Classification" Brain Sciences 10, no. 8: 526. https://doi.org/10.3390/brainsci10080526
APA StyleBarua, S., Ahmed, M. U., & Begum, S. (2020). Towards Intelligent Data Analytics: A Case Study in Driver Cognitive Load Classification. Brain Sciences, 10(8), 526. https://doi.org/10.3390/brainsci10080526