
A Muscular and Cerebral Physiological Indices Assessment for Stress Measuring during Virtual Wheelchair Guidance


Abstract
:1. Background
1.1. Wheelchair in Service of Disabilities
1.2. Stress and Physiological Indices
1.2.1. Factors Inducing Stress
- -
- adjustment to change: When changes occur in normal routines, some levels of stress can be expressed. However proportionally to the level of change, more adjustments must be made which leads to more and more stress. Moving away from home is one of the best examples to illustrate this case: trying to fit and make new friends, adjust to the new schedule, living with strangers is very challenging and can induce stress [19]. This also depends on many factors such as the cultural and ethical backgrounds as well as geographical localization.
- -
- workload and overload: It is often very difficult to decouple between stress and workload as they are strongly correlated [20]. For example, adding a workload or a secondary task to a primary one can inversely affect performance and consequently increase stress levels. In order to get overloaded, extreme or prolonged conditions of stress are required. Some projects as in [21], focused on driver’s behaviors during overload and found that their stress levels changed drastically.
- -
- crowding: Many studies such as [22] demonstrated that crowding has several effects on stress, health, motivation and cognitive development. Except for family size, the density or number of people per room are relevant variables for measuring the effects of crowding [23]. The same research stated that overstimulating environments can lead to withdrawal behaviors. Extreme crowding situations are known as overcrowding.
- -
- Time pressure: presented always as the most influent stressor [24], many studies addressed the impact of time pressure on cognitive performance in order to induce stress. [25] detected speech acoustic features in stressful situations. The time limit was introduced during the experiment. The experiment lasts ten minutes, but this information was hidden, until the seventh minute when subjects were informed that they should finish their mission in three minutes. A significant difference was detected between features (Pitch mean, Pitch median, Intensity max, Pitch max, Spectral tilt mean, Intensity mean, Intensity min, Intensity range, Pitch min, F1 min, Intensity std, Intensity median, F3 range) from the first seven the last three minutes. The classification rate reached 76.42%. These results suggest that deeper investigations could detect efficiently the introduction of the time pressure factor as stressor. In our previous work [26,27] time pressure was investigated as stressor as well as its influence on EEG data. It was concluded that temporal and frequency features extracted from frontal and fronto-central sensors were significantly correlated with stress levels. However, this study suggested the introduction of more stressors to assess EEG efficiency as input to detect human factors. Besides, they reported that other physiological sensors such as (EMG, ECG...) could enhance detection performance. The present work tries to deepen the latter findings by gathering another set of data and experiments.
1.2.2. Assessing Stress through Physiolocal Indices
- -
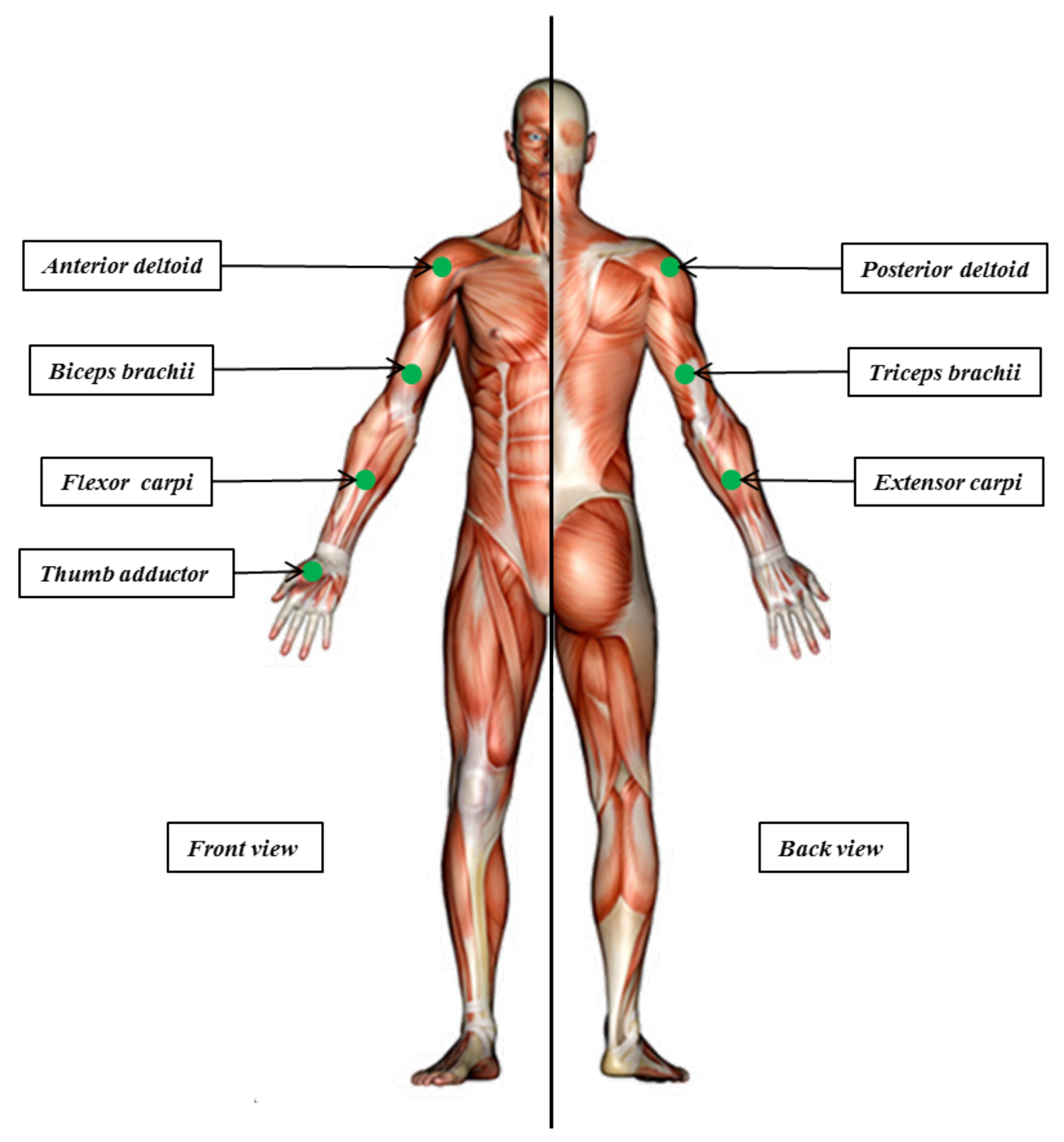
- Acquire significant features from muscular activity through EMG before its degeneration and its complete loss.
- -
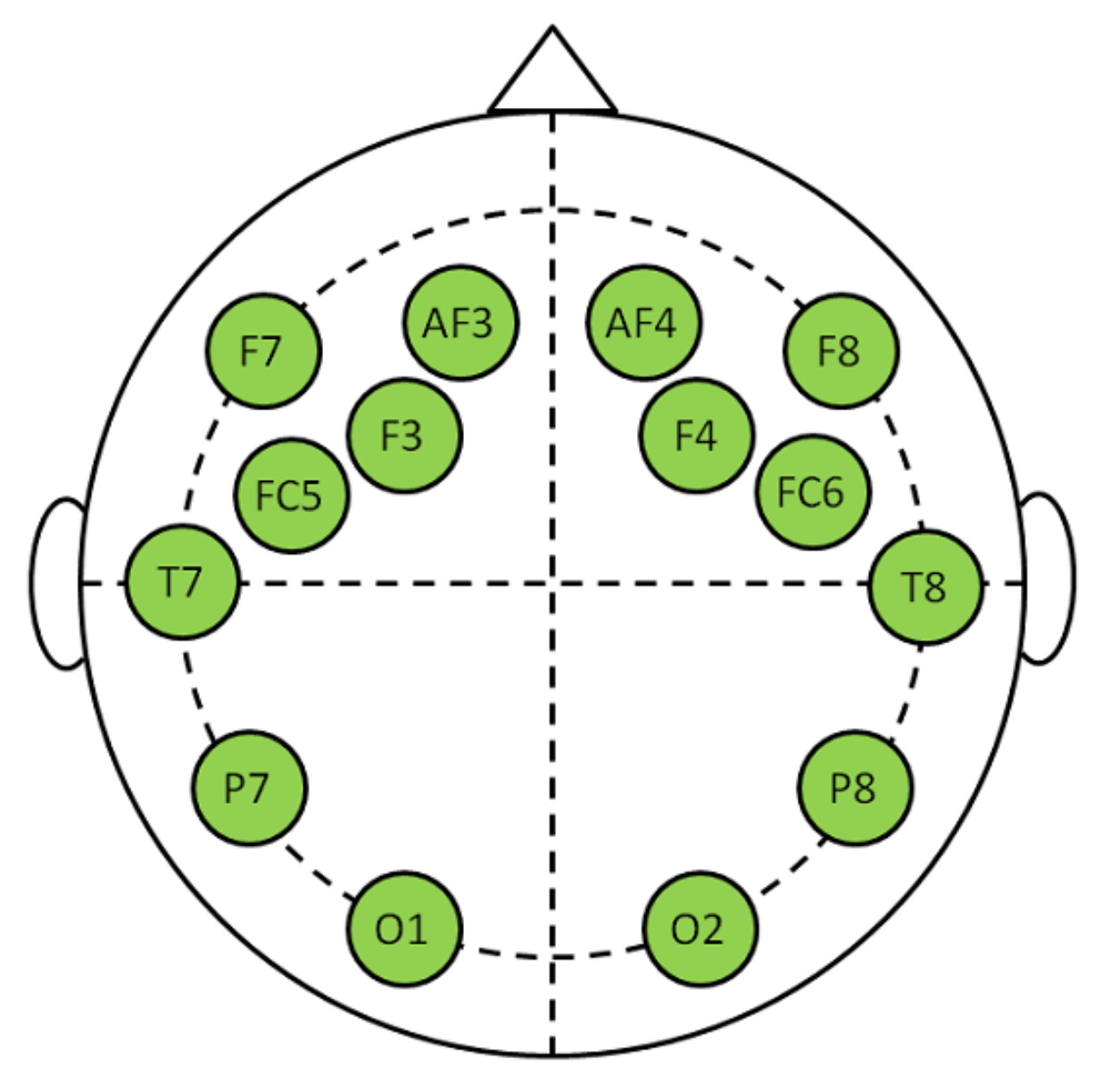
- Acquire significant features from brain activity through EEG as this modality will be the only possibility for the subject to communicate with his external environment.
- -
- Assess the correlation between both modalities in to estimate the emotional state of the subject and especially stress level.
1.3. Current Study: Goals and Steps
- -
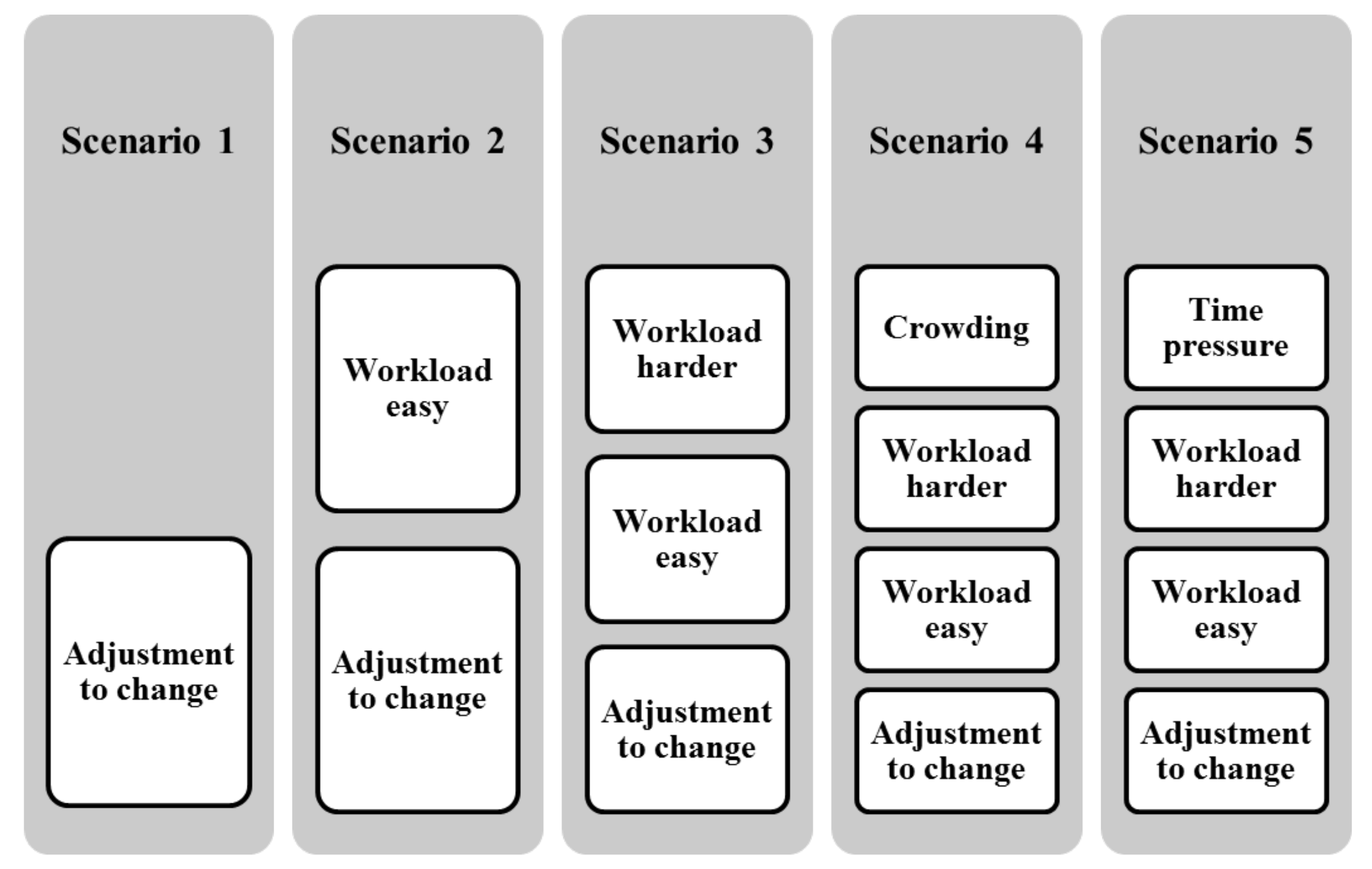
- Scenario 1: adjustment to change: The storyboard stipulates that the subject takes the role of a newly installed roomer who must interact with his environment. He/she is guided by his roommate to visit the different rooms of the house to fit and adapt himself to the new environment.
- -
- Scenario 2: easy workload: The subject is asked to collect some objects to clean the house to prepare for a night party. Some indications about the location of each object are given. The adjustment to change stressor is kept as the subject is still adapting himself to the new lifestyle, but the stress is induced through the introduced workload which is the task of collecting objects.
- -
- Scenario 3: harder workload: The user has to collect the same objects placed in unknown locations with no indications given. His roommate proposes to help him finding the objects while in fact he keeps only on following the subject wherever he goes. Introducing the unknown location fact, the lack of guidance and the following avatar, increases the workload to be provided which, in turn, is assumed to increase stress level. It is very important to state that increasing the workload could lead to fatigue. However, the purpose of this experiment is to highlight stress. This specific point will be discussed later as it is difficult to decouple between fatigue and stress.
- -
- Scenario 4: crowding: as the party starts, many people are coming. Here again, the subject has to gather objects from different unknown locations with no help. The introduction of many avatars in the environment makes it very cumbersome and this introduces the crowding factor as a stressor. In order to prevent the subject from providing extra maneuvers, all avatars are programmed to avoid the wheelchair at a distance of three meters (virtual environment scale). Besides, collision option is disabled, i.e., even if the avatar collides with the wheelchair, the navigation won’t be interrupted.
- -
- Scenario 5: Time pressure: elapsing time was added as one of the invitees was sick and the subject has to find quickly some medicines to ensure his recovery. The medicines are placed in unknown locations and no hints are provided for guidance. The dedicated duration for this scenario is three minutes, which is fair to collect all objects. The mapping between stressors and different scenarios are summarized in the Figure 1. The goal of the current study is to assess stress by the mean of peripheral and central information features which are extracted and selected. To study correlations between scenarios and selected features, PCA, Fisher’s tests, ANOVA and adhoc Tukey t-tests were then used. This study addresses the following questions: What is the artifact that induces mostly the stress? which features (mental and muscular) are the most correlated with stress? is there any synchronization between mental and muscular activities over stress impact? is EEG reliable to set up systems able to detect stress during wheelchair navigations?.
2. Methods
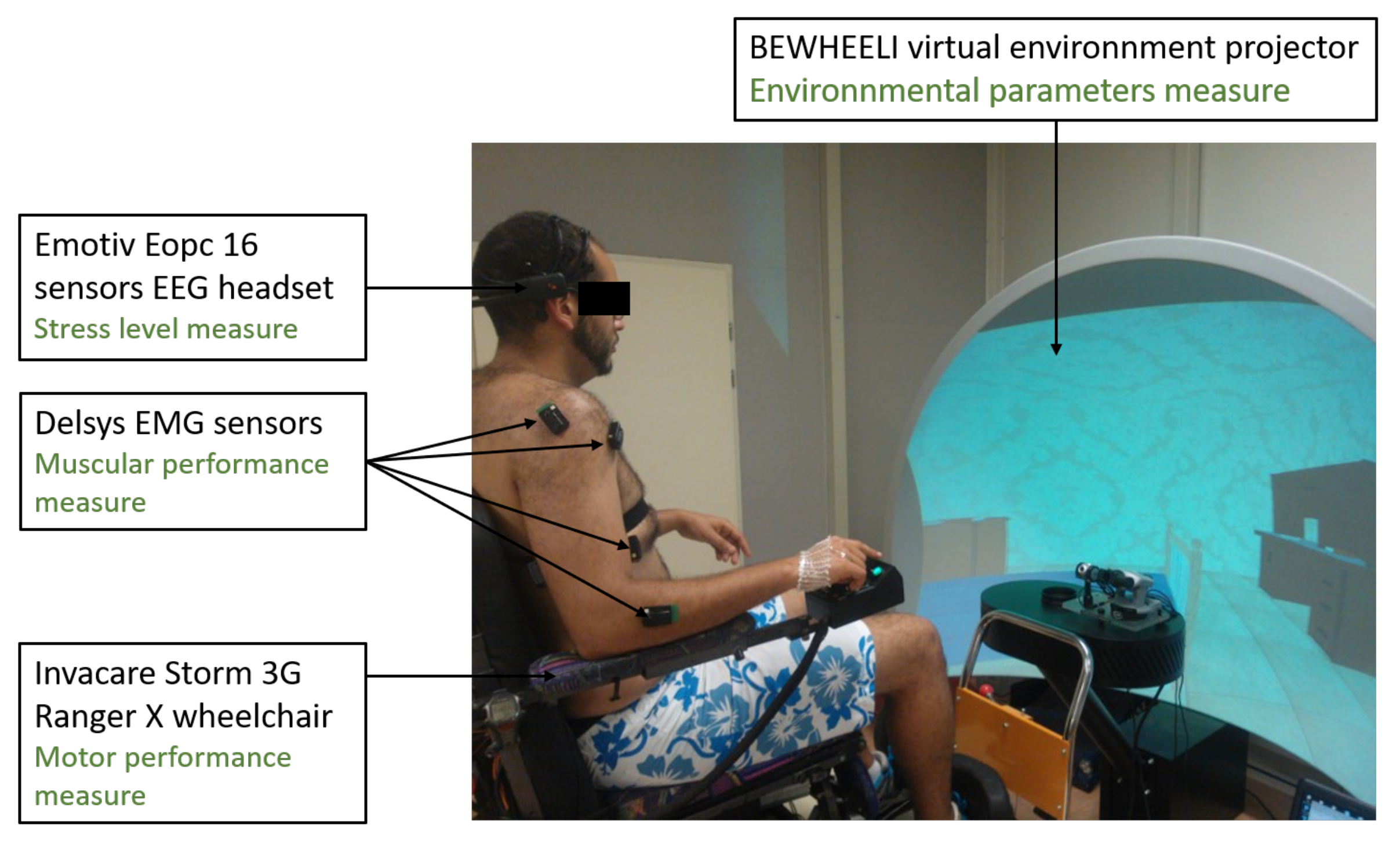
2.1. Environment and Materials
2.2. Subjects
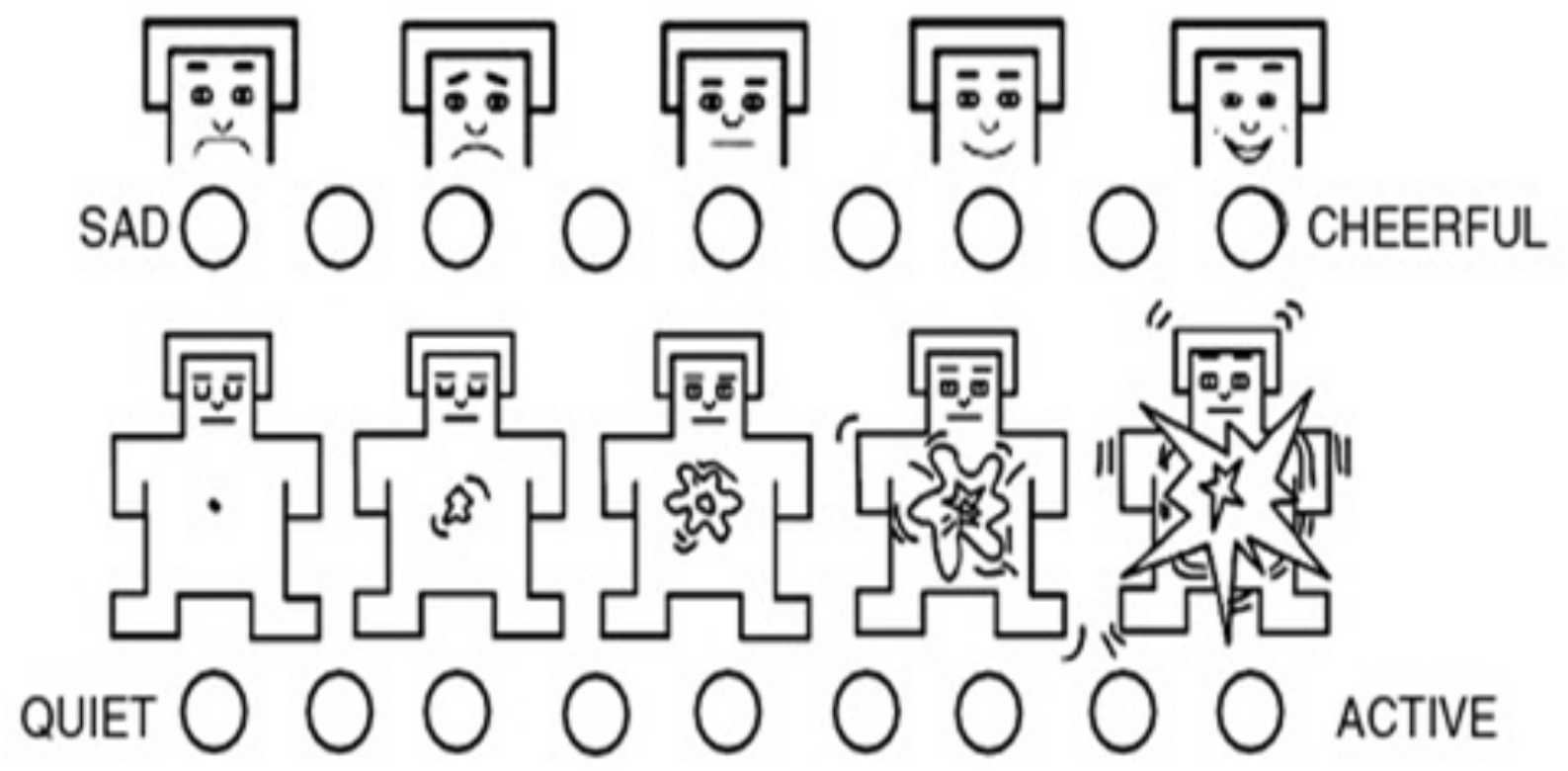
2.3. Scales of Emotions and Workload
2.4. The Procedure of the Experiment
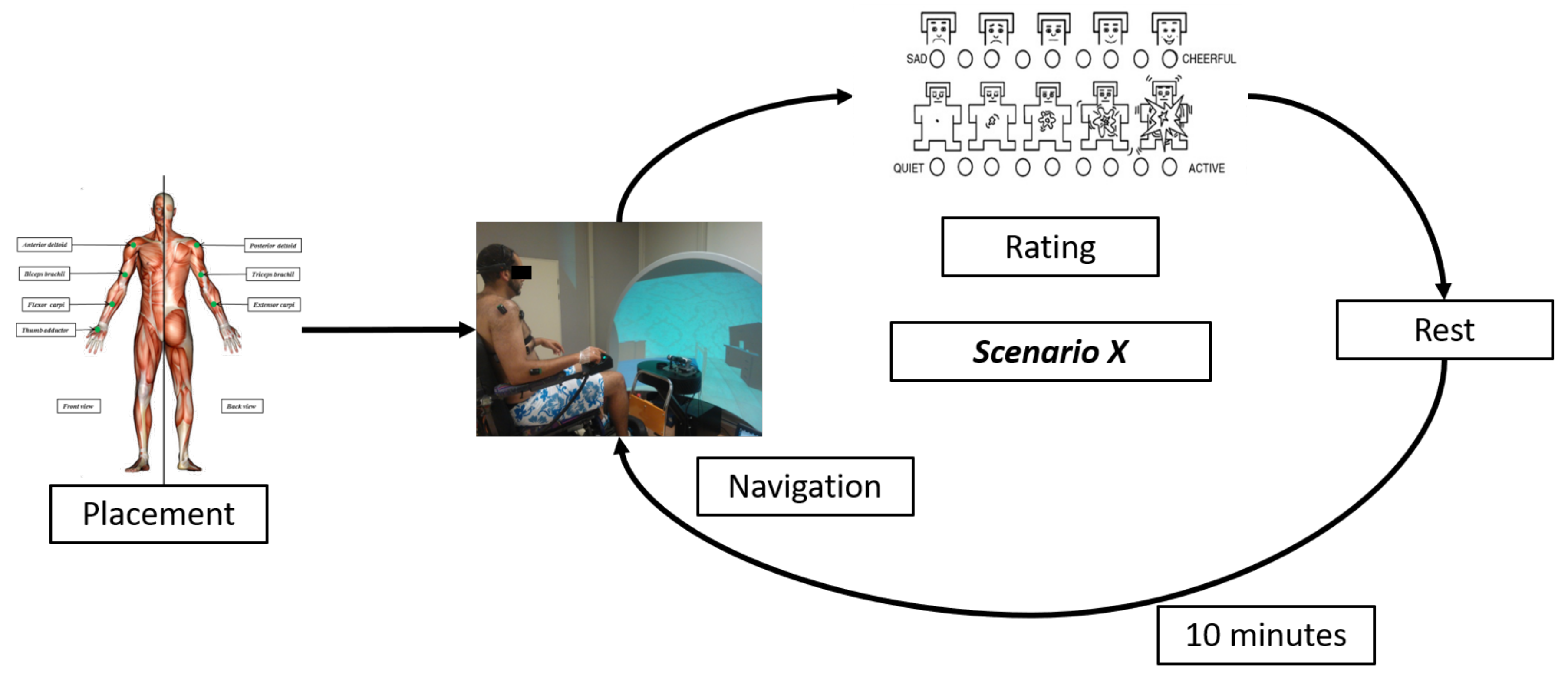
2.4.1. Placement of Sensors
2.4.2. Procedure
2.4.3. Features Extraction
2.5. Statistical Analysis
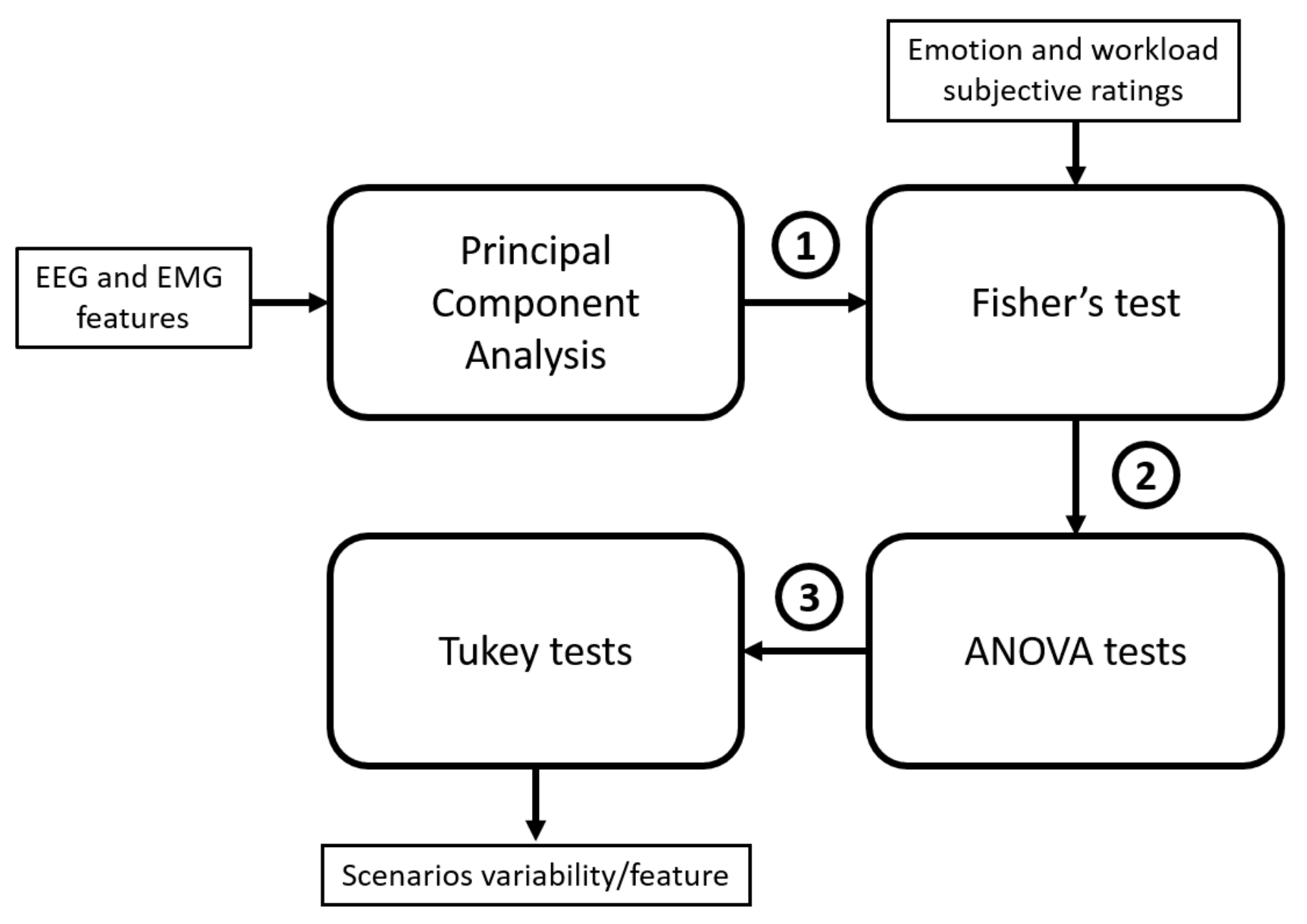
- Initially, independence between features was undertaken using PCA. Following the method presented by Rocchi et al. [49] to select relevant features which are used as input for the correlation block.
- In order to assess the correlation between EEG, EMG selected components and subjective ratings, Fisher’s method [50] is apprehended. p-values and spearman correlated coefficients were calculated between features and ratings for each participant. Assuming independence [51], Fisher’s method is used to combine the resulting p-values into one p-value. Finally, features with significant correlations () were selected.
- ANOVA and Tukey tests were performed to assess the variability between the effect of stress level on features and the scenarios. The reported scores will give us an idea about the efficiency of the artifacts to reach the needed level of stress and its impact on physiological sensors.
2.5.1. Principal Component Analysis (PCA)
- -
- Compute PCs for each scenario separately and for all scenarios. While computing PCs for all scenarios is used to extract uncorrelated features coarsely, computing PCs for each scenario validates the main features already found in all scenarios and accounts for small variations between scenarios. Consequently, more detailed features can be detected.
- -
- Calculate the new weights of the features in the PC.
- -
- Calculate the correlation coefficient between features and PC based on the following equation:where is the correlation coefficient between the feature and the principal component . is the weight of the the feature in the principal component which correspond to the eigenvectors of the variance-covariance matrix S. are the eigenvalues of the matrix S. They represent the variance explained by each PC.
- -
- Attribute an occurrence index to each highly correlated feature per PC and per scenario. This index will reveal if the corresponding feature is redundant in scenarios (and in this case it is relevant to be considered for the Fisher’s tests).
- -
- Finally, dress a ranking list with features, their correlation coefficients and their occurrence indices. Features with the highest occurrence score are retained.
2.5.2. Spearman Coefficients and Fisher’s Test
2.5.3. Anova and Tukey Tests
3. Results
3.1. Analysis of Subjective Rating
3.2. Correlation between Stress and Emg Features
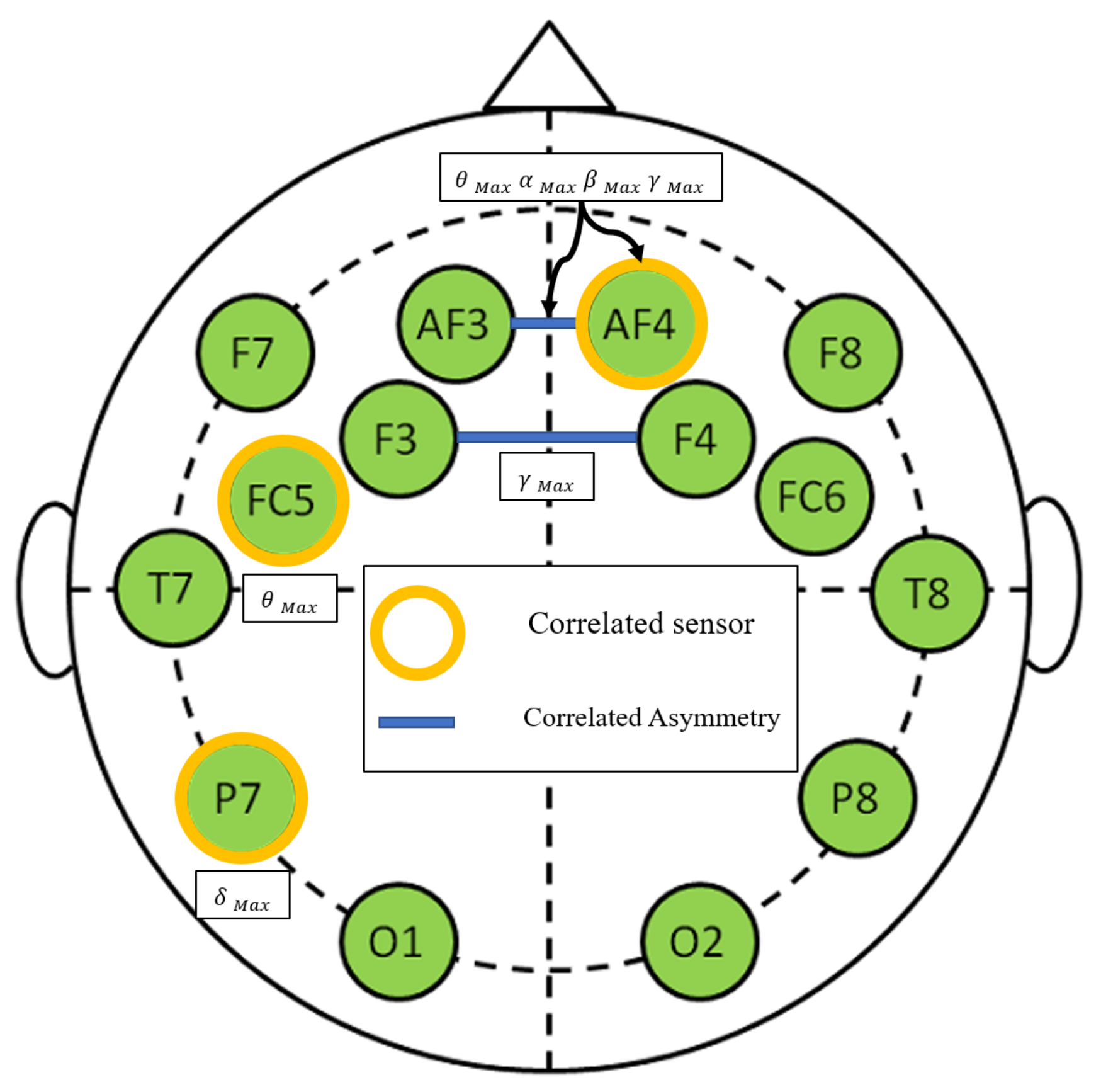
3.3. Correlation between Stress and Eeg Features
3.4. Effects of Stress on Different Scenarios
3.4.1. Anova Tests
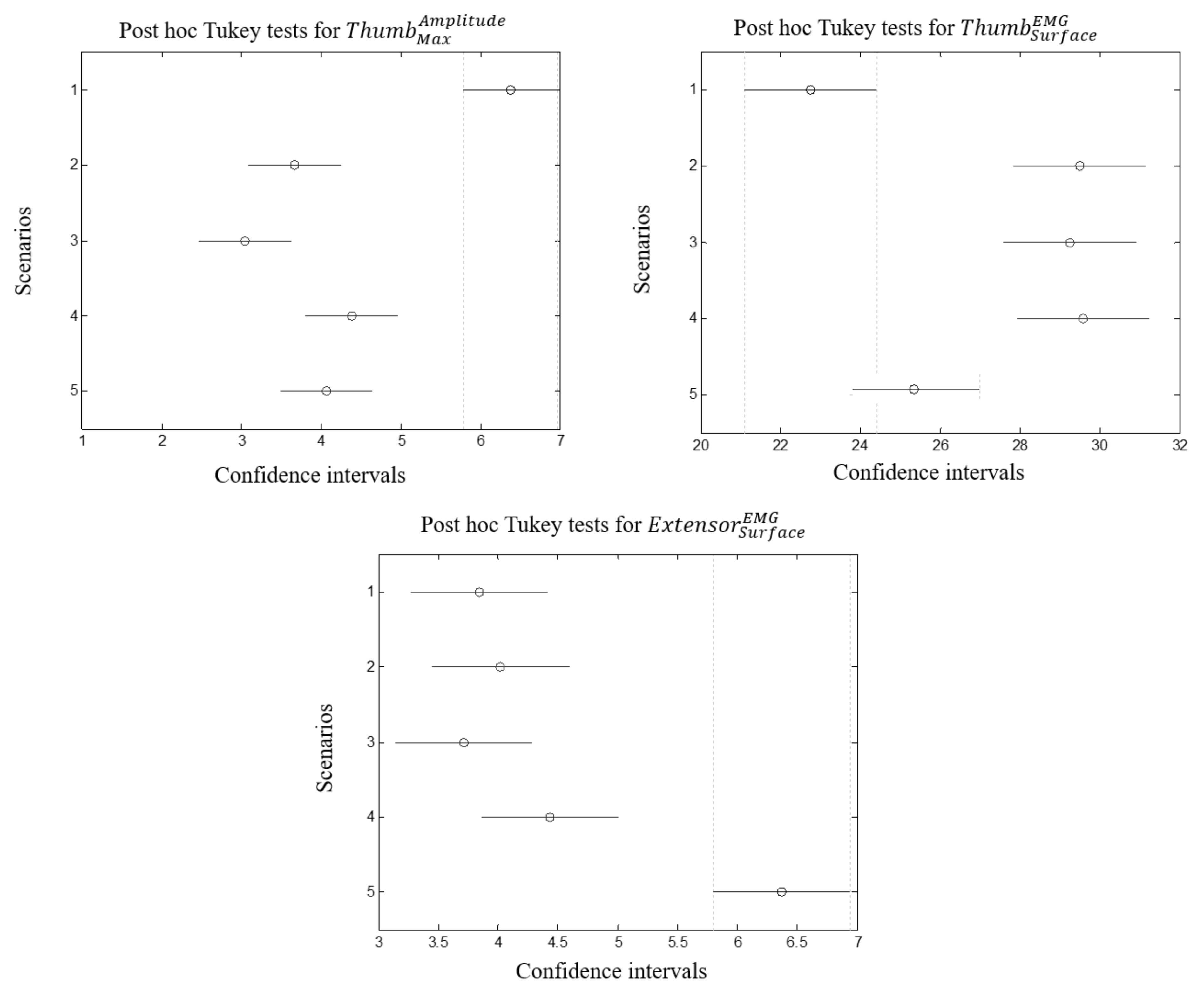
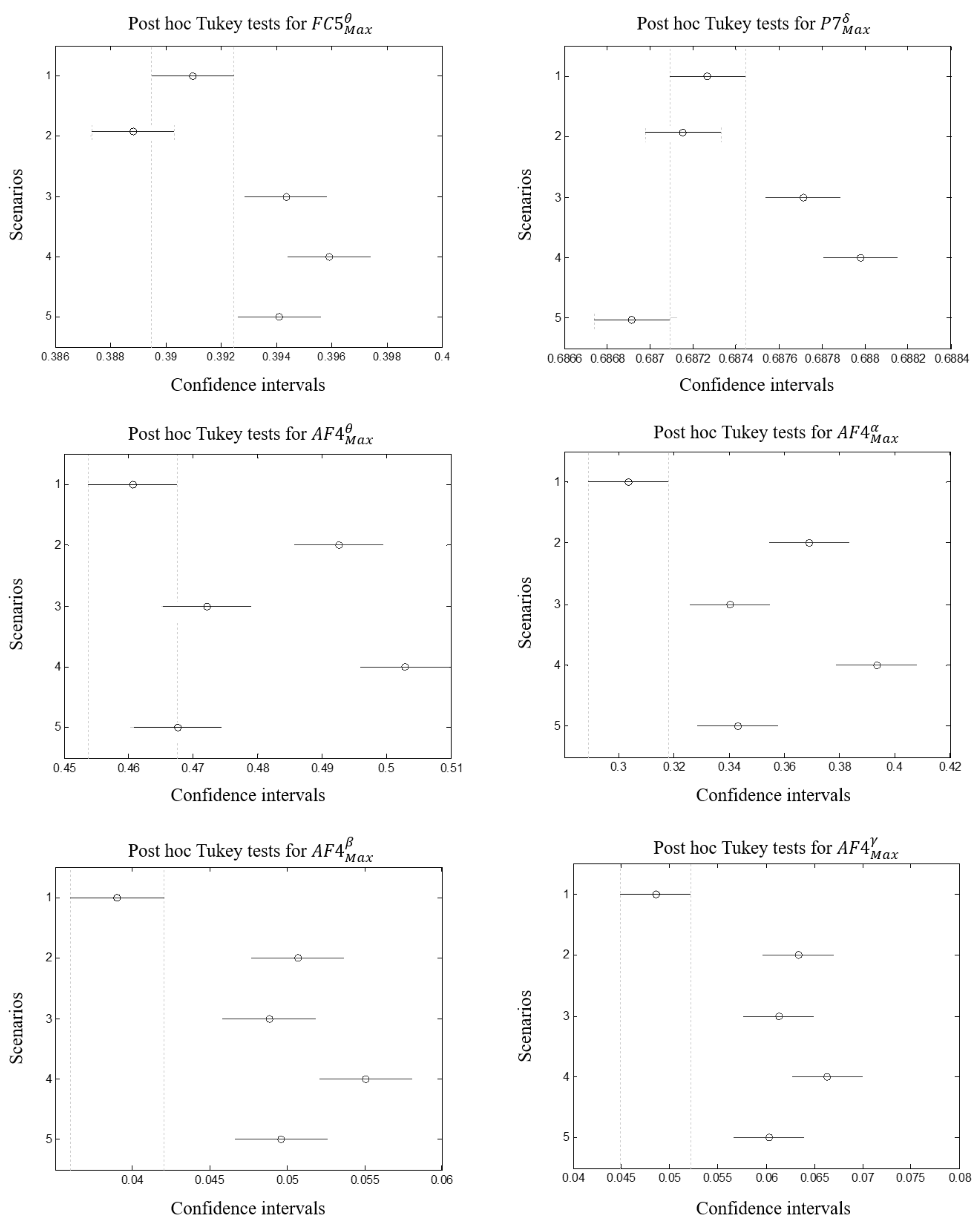
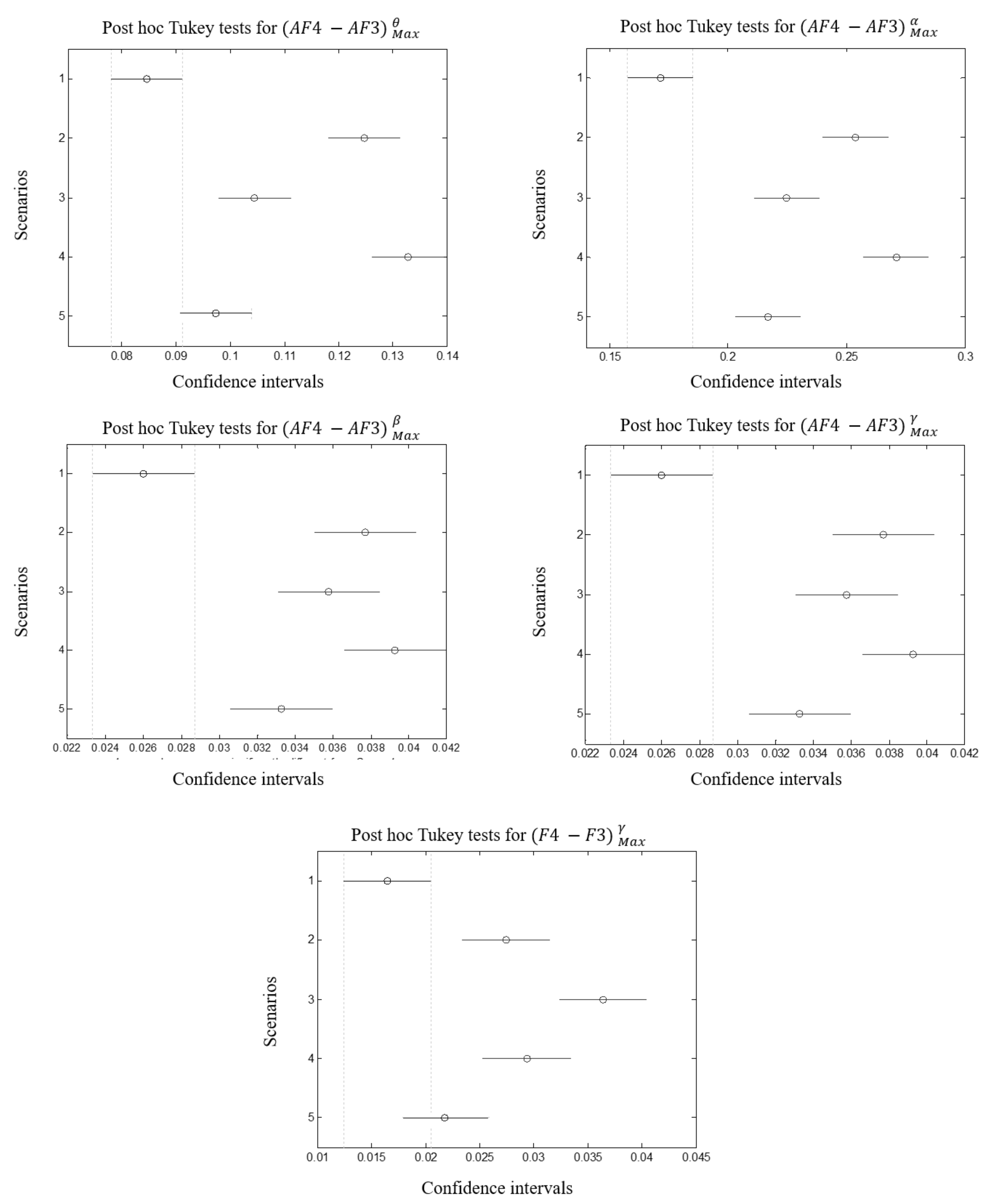
3.4.2. Posthoc Tukey Tests
4. Discussion
4.1. Effects of Environmental Changes on Stress
4.2. Muscular Activity Compensation
4.3. Cerebral Activity Changes
4.4. De-Synchronization between Brain and Muscles
4.5. Reliability of EEG
4.6. Shortages of the Current Findings
5. Conclusions
6. Ethical Approval
7. Key Points
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xerfi. Zoom sur le Marché des Fauteuils Roulants. 2014. Available online: https://www.capgeris.com/tendances-marches-1411/zoom-sur-le-marche-des-fauteuils-roulants-a28845.htm (accessed on 21 February 2021).
- World Health Organization. World Health Statistics; WHO Press, World Health Organization: Geneva, Switzerland, 2008. [Google Scholar]
- Randolph, A.B.; Moore Jackson, M.M. Assessing Fit of Nontraditional Assistive Technologies. ACM Trans. Access. Comput. 2010, 2, 16:1–16:31. [Google Scholar] [CrossRef]
- Tareq, Z.; Bahaa, B.; Zaidan, A.; Suzani, M. A Review of Disability EEG based Wheelchair Control System: Coherent Taxonomy, Open Challenges and Recommendations. Comput. Methods Programs Biomed. 2018, 164. [Google Scholar] [CrossRef]
- Ren, M.; Karimi, H. A fuzzy logic map matching for wheelchair navigation. GPS Solut. 2012, 16, 273–282. [Google Scholar] [CrossRef]
- How, T.V.; Wang, R.; Mihailidis, A. Evaluation of an intelligent wheelchair system for older adults with cognitive impairments. J. Neuroeng. Rehabil. 2013, 10, 1–16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vander Poorten, E.B.; Demeester, E.; Hüntemann, A.; Reekmans, E.; Philips, J.; De Schutter, J. Backwards Maneuvering Powered Wheelchairs with Haptic Guidance. In Proceedings of the 2012 International Conference on Haptics: Perception, Devices, Mobility, and Communication (EuroHaptics’12), Tampere, Finland, 13–15 June 2012; Volume Part I. Springer: Berlin/Heidelberg, Germany, 2012; pp. 419–431. [Google Scholar]
- Urdiales, C.; Perez, E.; Peinado, G.; Fdez-Carmona, M.; Peula, J.; Annicchiarico, R.; Sandoval, F.; Caltagirone, C. On the Construction of a Skill-Based Wheelchair Navigation Profile. Neural Syst. Rehabil. Eng. IEEE Trans. 2013, 21, 917–927. [Google Scholar] [CrossRef] [PubMed]
- Lamti, H.A.; Ben Khelifa, M.M.; Gorce, P.; Alimi, A.M. A brain and gaze-controlled wheelchair. Comput. Methods Biomech. Biomed. Eng. 2013, 16, 128–129. [Google Scholar] [CrossRef] [PubMed]
- Montesano, L.; Diaz, M.; Bhaskar, S.; Minguez, J. Towards an Intelligent Wheelchair System for Users With Cerebral Palsy. Neural Syst. Rehabil. Eng. IEEE Trans. 2010, 18, 193–202. [Google Scholar] [CrossRef] [Green Version]
- Iturrate, I.; Antelis, J.; Kubler, A.; Minguez, J. A Noninvasive Brain-Actuated Wheelchair Based on a P300 Neurophysiological Protocol and Automated Navigation. Robot. IEEE Trans. 2009, 25, 614–627. [Google Scholar] [CrossRef] [Green Version]
- Millan, J.; Galan, F.; Vanhooydonck, D.; Lew, E.; Philips, J.; Nuttin, M. Asynchronous non-invasive brain-actuated control of an intelligent wheelchair. In Proceedings of the Engineering in Medicine and Biology Society, Hilton Minneapolis, MN, USA, 2–6 September 2009; pp. 3361–3364. [Google Scholar] [CrossRef] [Green Version]
- Tavares, J.A.; Barbosa, J.; Costa, C.; Yamin, A.; Real, R. A Smart Wheelchair Based on Ubiquitous Computing. In Proceedings of the 6th International Conference on PErvasive Technologies Related to Assistive Environments (PETRA ’13), Island of Rhodes, Greece, 29–31 May 2013; ACM: New York, NY, USA, 2013; pp. 1:1–1:4. [Google Scholar]
- Lamti, H.A.; Ben Khelifa, M.M.; Alimi, A.M.; Gorce, P. Effect of fatigue on SSVEP during virtual wheelchair navigation. J. Theor. Appl. Inf. Technol. 2014, 65, 1–10. [Google Scholar]
- Lamti, H.A.; Ben Khelifa, M.M.; Alimi, A.M.; Gorce, P. Emotion detection for wheelchair navigation enhancement. Robotica 2016, 34, 1209–1226. [Google Scholar] [CrossRef]
- Lamti, H.; Ben Khelifa, M.M.; Hugel, V. Mental fatigue level detection based on event related and visual evoked potentials features fusion in virtual indoor environment. Cogn. Neurodynamics 2019, 13, 271–285. [Google Scholar] [CrossRef] [PubMed]
- Biondi M, P.A. Psychological Stress and Neuroendocrine Function in Humans: The Last Two Decades of Research. Psychother Psychosom 1999, 68, 114–150. [Google Scholar] [CrossRef]
- Eisenach, J.H.; Sprung, J.; Clark, M.M.; Shanafelt, T.D.; Johnson, B.D.; Kruse, T.N.; Chantigian, D.P.; Carter, J.R.; Long, T.R. The psychological and physiological effects of acute occupational stress in new anesthesiology residents: A pilot trial. Anesthesiology 2014, 121, 878–893. [Google Scholar] [CrossRef] [Green Version]
- Masuda, M.; Holmes, T.H. The social readjustment rating scale: A cross-cultural study of Japanese and Americans. J. Psychosom. Res. 1967, 11, 227–237. [Google Scholar] [CrossRef]
- Metzger, U.; Parasuraman, R. Automation in Future Air Traffic Management: Effects of Decision Aid Reliability on Controller Performance and Mental Workload. Hum. Factors 2005, 47, 35–49. [Google Scholar] [CrossRef]
- Matthews, G.; Sparkes, T.J.; Bygrave, H.M. Attentional Overload, stress, and simulate Driving Performance. Hum. Perform. 1996, 9, 77–101. [Google Scholar] [CrossRef]
- Vine, I. Crowding and stress: 1. Review of variables and theories. Curr. Psychol. Rev. 1981, 1, 305–323. [Google Scholar] [CrossRef]
- Evans, G.W. Child Development and the Physical Environment. Annu. Rev. Psychol. 2006, 57, 423–451. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Error, stress and the role of neuromotor noise in space oriented behaviour. Biol. Psychol. 2000, 51, 151–171. [CrossRef]
- Frampton, M.; Sripada, S.; Bion, R.A.H.; Peters, S. Detection of Time-pressure Induced Stress in Speech via Acoustic Indicators. In Proceedings of the 11th Annual Meeting of the Special Interest Group on Discourse and Dialogue (SIGDIAL ’10), Tokyo, Japan, 15–24 September 2010; Association for Computational Linguistics: Stroudsburg, PA, USA, 2010; pp. 253–256. [Google Scholar]
- Lamti, H.A.; Gorce, P. The effect of time pressure on stress levels during virtual wheelchair navigation. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 1500–1503. [Google Scholar]
- Lamti, H.; Ben Khelifa, M.M.; Hugel, V. Cerebral and gaze data fusion for wheelchair navigation enhancement: Case of distracted users. Robotica 2019, 37, 246–263. [Google Scholar] [CrossRef]
- Healey, J.A.; Picard, R.W. Detecting Stress During Real-World Driving Tasks using Physiological Sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef] [Green Version]
- Perez, J.; Cruz, A. Linear Discriminant Analysis on Brain Computer Interface. In Proceedings of the 2007 IEEE International Symposium on Intelligent Signal Processing, Alcala de Henares, Spain, 3–5 October 2007; pp. 1–6. [Google Scholar]
- Shi, Y.; Nguyen, M.H.; Blitz, P.; French, B.; Fisk, S.; De la Torre, F.; Smailagic, A.; Siewiorek, D.P.; al’ Absi, M.; Ertin, E.; et al. Personalized Stress Detection from Physiological Measurements. 2010. Available online: https://www.google.com.hk/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwi31Y-Atf3uAhXTzIsBHab1BRQQFjABegQIARAD&url=http%3A%2F%2Fwww.humansensing.cs.cmu.edu%2Fsites%2Fdefault%2Ffiles%2F8stress_detect.pdf&usg=AOvVaw0wS9vgiQE4GWxjDptTX9hy (accessed on 21 February 2021).
- Minakuchi, E.; Ohnishi, E.; Ohnishi, J.; Sakamoto, S.; Hori, M.; Motomura, M.; Hoshino, J.; Murakami, K.; Kawaguchi, T. Evaluation of mental stress by physiological indices derived from finger plethysmography. J. Physiol. Anthropol. 2013, 32, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Imanishi, A.; Oyama-Higa, M. On the largest lyapunov exponents of finger plethysmogram and heart rate under anxiety, fear, and relief states. In Proceedings of the 2007 IEEE International Conference on Systems, Man and Cybernetics, Montreal, QC, Canada, 7–10 October 2007; pp. 3119–3123. [Google Scholar]
- Queteschiner, D. Reality Factory. 2012. Available online: https://www.jku.at/institut-fuer-stroemungslehre-und-waermeuebertragung/pfm/start/team/daniel-queteschiner/ (accessed on 21 February 2021).
- Shaw, G. Wheelchair rider risk in motor vehicles: A technical note. J. Rehab. Res. Dev. 2000, 37, 89–100. [Google Scholar]
- Ekman, P.; Friesen, W.V.; Ellsworth, P. Emotion in the Human Face; Oxford University Press: Oxford, UK, 1972. [Google Scholar]
- Hudlicka, E. Guidelines for Designing Computational Models of Emotions. Int. J. Synth. Emot. 2011, 2, 26–79. [Google Scholar] [CrossRef]
- Russell, J.A. A circumplex model of affect. J. Personal. Soc. Psychol. 1980, 39, 1161–1178. [Google Scholar] [CrossRef]
- Sozinov, A.; Laukka, S.; Tuominen, T.; Siipo, A.; Nopanen, M.; Alexandrov, Y. Transfer of Simple Task Learning is Different in Approach and Withdrawal Contexts. Procedia Soc. Behav. Sci. 2012, 69, 449–457. [Google Scholar] [CrossRef] [Green Version]
- Morrison, B.B.; Dorn, B.; Guzdial, M. Measuring Cognitive Load in Introductory CS: Adaptation of an Instrument. In Proceedings of the Tenth Annual Conference on International Computing Education Research (ICER ’14), Glasgow, Scotland, 11–13 August 2014; ACM: New York, NY, USA, 2014; pp. 131–138. [Google Scholar]
- Jacquier-Bret, J.; Rezzoug, N.; Vallier, J.; Tournebise, H.; Gorce, P. Reach to grasp kinematics and EMG analysis of C6 quadriplegic subjects. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 5934–5937. [Google Scholar]
- Herwig, U.; Satrapi, P.; Schönfeldt-Lecuona, C. Using the International 10–20 EEG System for Positioning of Transcranial Magnetic Stimulation. Brain Topogr. 2003, 16, 95–99. [Google Scholar] [CrossRef] [PubMed]
- Takizawa, K.; Soma, T.; Nosaka, K.; Ishikawa, T.; Ishii, K. Effect of warm-up exercise on delayed-onset muscle soreness. Eur. J. Sport Sci. 2012, 12, 455–461. [Google Scholar] [CrossRef] [Green Version]
- Malone, A.; Meldrum, D.; Bolger, C. Gait impairment in cervical spondylotic myelopathy: Comparison with age- and gender-matched healthy controls. Eur. Spine J. 2012, 21, 2456–2466. [Google Scholar] [CrossRef] [Green Version]
- Louis, N.; Bonnefoy, A.; Pradon, D.; Gorce, P. A preliminary report. Muscle forces during reaching: EMG-to-force processing. Comput. Methods Biomech. Biomed. Eng. 2007, 10, 57–58. [Google Scholar] [CrossRef]
- Lin, J.K.; Grier, D.G.; Cowan, J.D. Feature Extraction Approach to Blind Source Separation. In Proceedings of the 1997 IEEE Signal Processing Society Workshop, Amelia Island, FL, USA, 24–26 September 1997; pp. 398–405. [Google Scholar]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef] [Green Version]
- Koelstra, S.; Muhl, C.; Soleymani, M.; Lee, J.S.; Yazdani, A.; Ebrahimi, T.; Pun, T.; Nijholt, A.; Patras, I. DEAP: A Database for Emotion Analysis; Using Physiological Signals. IEEE Trans. Affect. Comput. 2012, 3, 18–31. [Google Scholar] [CrossRef] [Green Version]
- Hinneburg, A.; Keim, D.A. Optimal Grid-Clustering: Towards Breaking the Curse of Dimensionality in High-Dimensional Clustering. In Proceedings of the 25th International Conference on Very Large Data Bases (VLDB ’99), Scotland, UK, 7–10 September 1999; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1999; pp. 506–517. [Google Scholar]
- Rocchi, L.; Chiari, L.; Cappello, A. Feature selection of stabilometric parameters based on principal component analysis. Med Biol. Eng. Comput. 2004, 42, 71–79. [Google Scholar] [CrossRef]
- Picard, R.; Vyzas, E.; Healey, J. Toward machine emotional intelligence: Analysis of affective physiological state. Pattern Anal. Mach. Intell. IEEE Trans. 2001, 23, 1175–1191. [Google Scholar] [CrossRef] [Green Version]
- Lazar, N.A.; Luna, B.; Sweeney, J.A.; Eddy, W.F. Combining Brains: A Survey of Methods for Statistical Pooling of Information. NeuroImage 2002, 16, 538–550. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duffy, F.; Jones, K.; Bartels, P.; McAnulty, G.; Albert, M. Unrestricted principal components analysis of brain electrical activity: Issues of data dimensionality, artifact, and utility. Brain Topogr. 1992, 4, 291–307. [Google Scholar] [CrossRef]
- Stickel, C.; Ebner, M.; Steinbach-Nordmann, S.; Searle, G.; Holzinger, A. Emotion Detection: Application of the Valence Arousal Space for Rapid Biological Usability Testing to Enhance Universal Access. In Universal Access in Human-Computer Interaction. Addressing Diversity; Stephanidis, C., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5614, pp. 615–624. [Google Scholar]
- Carmien, S.; Dawe, M.; Fischer, G.; Gorman, A.; Kintsch, A.; Sullivan, J.F., Jr. Socio-technical Environments Supporting People with Cognitive Disabilities Using Public Transportation. ACM Trans. Comput. Hum. Interact. 2005, 12, 233–262. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Muscle | Extracted Features/Muscle | Definition |
|---|---|---|
| Thumb adductor | (in %) percentage of the maximum peak with respect to the MVC | |
| Flexor carpi | (in %) percentage of the mean amplitude with respect to the MVC | |
| Extensor carpi | (in %) percentage of the EMG surface with respect to the MVC | |
| Biceps brachii | (in db) The maximum power spectral density | |
| Triceps brachii | (in db) The mean power spectral density | |
| Anterior deltoid | (in db/Hz) The surface of the power spectral density | |
| Posterior deltoid | (in Hz) The medium frequency |
| Sensor | Extracted Features/Sensor | Definition |
|---|---|---|
| AF3 | Maximum Delta power | |
| F7 | Mean Delta power | |
| F3 | Standard deviation Delta power | |
| FC5 | Maximum Theta power | |
| T7 | Mean Theta power | |
| P7 | Standard deviation Theta power | |
| O1 | Maximum Alpha power | |
| O2 | Mean Alpha power | |
| P8 | Standard deviation Alpha power | |
| T8 | Maximum Beta power | |
| FC6 | Mean Beta power | |
| F4 | Standard deviation Beta power | |
| F8 | Maximum Gamma power | |
| AF4 | Mean Gamma power | |
| AF4-AF3 | Standard deviation Gamma power | |
| F8-F7 | ||
| F4-F3 | ||
| FC6-FC5 | ||
| T8-T7 | ||
| P8-P7 | ||
| O2-O1 |
| Scenario | Sc1 | Sc2 | Sc3 | Sc4 | Sc5 |
|---|---|---|---|---|---|
| Valence | 6.85 (3.13) | 6.14 (2.6) | 4.57 (2.3) | 3 (1.15) | 2.85 (1.21) |
| Arousal | 5.14 (3.53) | 5.42 (2.14) | 6.14 (1.46) | 6.85 (0.89) | 7.28 (1.88) |
| Workload | 2.3 (1.78) | 2.5 (0.85) | 2.72 (1.3) | 3.7 (1.3) | 5.2 (0.96) |
| PC1 | PC2 | ||||||
|---|---|---|---|---|---|---|---|
| 51.5% | 16.4% | ||||||
| Muscle | Feature | Coefficient | Correlation | Muscle | Feature | Coefficient | Correlation |
| Thumb | 0.37 | 0.89 | Thumb | 0.69 | 0.81 | ||
| Thumb | 0.67 | 0.96 | Thumb | 0.05 | 0.55 | ||
| Extensor | 0.065 | 0.75 | Thumb | −0.021 | −0.49 | ||
| Extensor | 0.19 | 0.87 | Extensor | 0.2 | 0.59 | ||
| Flexor | 0.14 | 0.84 | Flexor | 0.25 | 0.56 | ||
| Flexor | 0.48 | 0.86 | |||||
| PC3 | PC4 | ||||||
| 14% | 7.83% | ||||||
| Muscle | Feature | Coefficient | Correlation | Muscle | Feature | Coefficient | Correlation |
| Extensor | 0.12 | 0.54 | Thumb | −0.081 | −0.61 | ||
| Extensor | −0.18 | −0.42 | Thumb | −0.029 | −0.45 | ||
| Flexor | 0.27 | 0.56 | Extensor | −0.031 | −0.85 |
| PC1 | PC2 | ||||||
|---|---|---|---|---|---|---|---|
| 74.9% | 8.55% | ||||||
| Muscle | Feature | Coefficient | Correlation | Muscle | Feature | Coefficient | Correlation |
| Thumb | 0.27 | 0.87 | Thumb | 0.49 | 0.57 | ||
| Thumb | 0.19 | 0.66 | Thumb | 0.086 | 0.5 | ||
| Thumb | 0.64 | 0.98 | Thumb | 0.11 | 0.82 | ||
| Extensor | 0.236 | 0.97 | |||||
| Flexor | 0.127 | 0.85 | |||||
| Flexor | 0.0047 | 0.97 | |||||
| PC3 | |||||||
| 6.26% | |||||||
| Muscle | Feature | Coefficient | Correlation | ||||
| Thumb | 0.46 | 0.43 | |||||
| Thumb | −0.42 | −0.42 | |||||
| Thumb | 0.0573 | 0.42 |
| PC1 | PC2 | ||||||
|---|---|---|---|---|---|---|---|
| 67.1% | 24.8% | ||||||
| Muscle | Feature | Coefficient | Correlation | Muscle | Feature | Coefficient | Correlation |
| Thumb | 0.11 | 0.63 | Thumb | 0.95 | 0.99 | ||
| Thumb | 0.66 | 0.9 | Thumb | 0.075 | 0.79 | ||
| Extensor | 0.022 | 0.61 | Extensor | 0.042 | 0.43 | ||
| Extensor | 0.26 | 0.98 | Extensor | 0.033 | 0.93 | ||
| Flexor | 0.051 | 0.67 | Flexor | 0.06 | 0.93 | ||
| Flexor | 0.66 | 0.99 |
| PC1 | PC2 | ||||||
|---|---|---|---|---|---|---|---|
| 75.4% | 15.2% | ||||||
| Muscle | Feature | Coefficient | Correlation | Muscle | Feature | Coefficient | Correlation |
| Thumb | 0.134 | 0.67 | Thumb | −0.045 | −0.46 | ||
| Thumb | 0.62 | 0.98 | Thumb | 0.916 | 0.96 | ||
| Thumb | 0.07 | 0.48 | Thumb | 0.089 | 0.75 | ||
| Extensor | 0.018 | 0.55 | Thumb | 0.08 | 0.69 | ||
| Extensor | 0.042 | 0.54 | |||||
| Extensor | −0.0011 | −0.47 |
| PC1 | |||
|---|---|---|---|
| 90.3% | |||
| Muscle | Feature | Coefficient | Correlation |
| Thumb | 0.12 | 0.81 | |
| Thumb | 0.68 | 0.98 | |
| Extensor | 0.017 | 0.67 | |
| Extensor | 0.017 | 0.54 | |
| Extensor | −0.011 | −0.42 | |
| Extensor | 0.04 | 0.72 |
| Feature | F-Statistic | p-Value |
|---|---|---|
| 3.89 | 0.0124 | |
| 2.89 | 0.0403 | |
| 3.01 | 0.0348 |
| Feature | F-Statistic | p-Value |
|---|---|---|
| 3.12 | 0.0304 | |
| 4.82 | 0.043 | |
| 5.57 | 0.00198 | |
| 4.43 | 0.006 | |
| 3.18 | 0.028 | |
| 2.844 | 0.0426 | |
| 7.36 | 0.003 | |
| 6.26 | 0.001 | |
| 3.086 | 0.031 | |
| 3.102 | 0.031 | |
| 2.91 | 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ben Khelifa, M.M.; Lamti, H.A.; Hugel, V. A Muscular and Cerebral Physiological Indices Assessment for Stress Measuring during Virtual Wheelchair Guidance. Brain Sci. 2021, 11, 274. https://doi.org/10.3390/brainsci11020274
Ben Khelifa MM, Lamti HA, Hugel V. A Muscular and Cerebral Physiological Indices Assessment for Stress Measuring during Virtual Wheelchair Guidance. Brain Sciences. 2021; 11(2):274. https://doi.org/10.3390/brainsci11020274
Chicago/Turabian StyleBen Khelifa, Mohamed Moncef, Hachem A. Lamti, and Vincent Hugel. 2021. "A Muscular and Cerebral Physiological Indices Assessment for Stress Measuring during Virtual Wheelchair Guidance" Brain Sciences 11, no. 2: 274. https://doi.org/10.3390/brainsci11020274
APA StyleBen Khelifa, M. M., Lamti, H. A., & Hugel, V. (2021). A Muscular and Cerebral Physiological Indices Assessment for Stress Measuring during Virtual Wheelchair Guidance. Brain Sciences, 11(2), 274. https://doi.org/10.3390/brainsci11020274