2.1. Preoperative Diagnostics Work Up
Computed tomography (CT) (third-generation 192-slice dual-source SOMATOM Force, Siemens Healthineers, Erlangen, Germany) and chest X-ray are commonly performed to delineate the heart anatomy and its relationships with the surrounding thoracic structures (
Figure 1A,B).
More specifically, chest X-ray provides an initial indication of the left heart ventricle volume and the position of its free margin relative to the chest wall and intercostal space. As depicted in
Figure 1A, we mark the mid-clavicular line and two horizontal lines that include the left second cardiac arch, corresponding to the left ventricle, allowing us to identify the possible position of the LAD with respect to these markers. This is very important to guide the positioning of ports, particularly the port for the endoscopic camera and for anchoring the left robotic arm; a bigger left ventricle requires a more medial port location to avoid competition between the instruments and beating heart. In addition, the LAD position can give indications on the effectively lateral site of the left mini-thoracotomy required for bypass grafting after mammary artery harvesting.
A CT scan or CT-ANGIO scan is useful in preoperative planning because it gives data on the size, position and quality of the left internal mammary artery and left anterior descending coronary artery (LAD). Indeed, the degree and site of any calcification of target vessels and any intramyocardial course of LAD can be assessed. A CT scan with 3D reconstruction can more accurately describe the relationship between the LAD and the chest wall, aiding in the selection of the intercostal space for thoracotomy.
Finally, radiological cardiac imaging provides information about the chest wall anatomy, facilitating port placement.
Pre-operative management is completed with spirometry, testing of the diffusing capacity of the lungs for carbon monoxide (DLCO), transthoracic echocardiography, electrocardiography and routine biochemical assessment. The pulmonary function test is important for the anesthesiologist to measure the lungs’ function and ability to transfer gas from inspired air to the bloodstream. In this way, it is possible to predict the patient’s response to mono-pulmonary ventilation, which is required for the robotic procedure. Severe pulmonary disease could contraindicate RA-MIDCAB.
In
Table 1, we summarize key parameters of preoperative work up.
2.2. Surgical Technique
In routine general anesthesia, a double-lumen endotracheal tube is placed for selective lung ventilation. Alternatively, the left lung is excluded with an endoluminal balloon.
To start the procedure, the patient is positioned in a supine posture with a square pad strategically located behind the left scapula to moderately bump up the left hemithorax.
As depicted in
Figure 2, the surgeon marks the second, fourth and seventh left intercostal space to guide the positioning of ports. Based on radiological images, they also define the fourth or fifth intercostal space for mini-thoracotomy.
Initially, both lungs are excluded from ventilation, and CO2 is insufflated with a needle into the left hemithorax at a mean pressure of 4–10 mmHg to collapse the left lung, prevent mediastinal shift related to right lung hyper expansion and move the heart to the right to create space. Then, only the left lung remains excluded. The target CO2 pressure is influenced by the size of the heart: a small heart allows for the creation of space with lower pressure levels.
The first 8 mm port, the site of the endoscopic camera, is placed in the fourth intercostal space, between the nipple and the anterior axillary line, especially in the dilated heart. Under endoscopic vision, a second 8 mm port is positioned in the second intercostal space, between the midclavicular and anterior axillary line. Some surgeons insert the third 8 mm port in the seventh intercostal space at the level of the anterior axillary line: we prefer to place this port in the seventh intercostal space medially to the anterior axillary line, as shown in
Figure 2A. We chose this site because later, when the LITA harvest is completed, the arm of the coronary stabilizer (Medtronic, Minneapolis, MN, USA, Octopus Nuvo Tissue stabilizer) is placed here, and we note a better angle, greater or equal to 100°, between the arm and the terminal movable portion of the stabilizer, simplifying placement on the left ventricular wall. This position ensures good stability of Octopus Nuvo at the anastomotic site while, with this angle, its rigid arm remains further from the apex and wall of the left ventricle, reducing the possibility of conflict and pressure on the heart and improving hemodynamic stability during bypass. It is also important to check the distance from the iliac spine to avoid conflict with the external support of the stabilizer arm.
A more lateral position of the third port, described in
Figure 2B, provides an angle less or equal to 90°; in this case, we note, in the reduced space of the mini-thoracotomy, less comfort in the positioning of the stabilizer on the cardiac surface and more difficult LAD stabilization. We also observe increased interference between the arm of the stabilizer and left ventricle, with greater influence on hemodynamic parameters.
Another strategy is to create a distinct subxiphoid access to place the stabilizer arm (
Figure 2C). This approach allows for the best angle between the arm and the terminal movable portion of the stabilizer (near 180°), almost parallel to the position of the LAD, enabling the best stability at the anastomotic site and minimal interference with patient hemodynamics. However, in this case, a surgical site is added with major surgical trauma, and sectioning of the xiphoid is required.
Therefore, customizing the port placement strategy based on radiological imaging is crucial for optimizing the technique.
Carbon dioxide (CO2) insufflation is continued through the third port with a target intrathoracic pressure of 6–10 mmHg. The Da Vinci X robot system (Intuitive surgical, Inc., Sunnyvale, CA, USA) is placed at the patient’s right side, and robotic arms are anchored to the designated working ports. A 30° endoscopic camera (Intuitive) is inserted in the second port to navigate the thorax, pericardium, and heart structures with enhanced views (10× magnification).
The surgeon carefully opens the pericardium above the phrenic nerve; pericardial fat is removed if necessary. A second hole in pericardium is realized under the phrenic nerve; in case of bleeding or pericardial effusion, this hole drains the fluids in the left pleura.
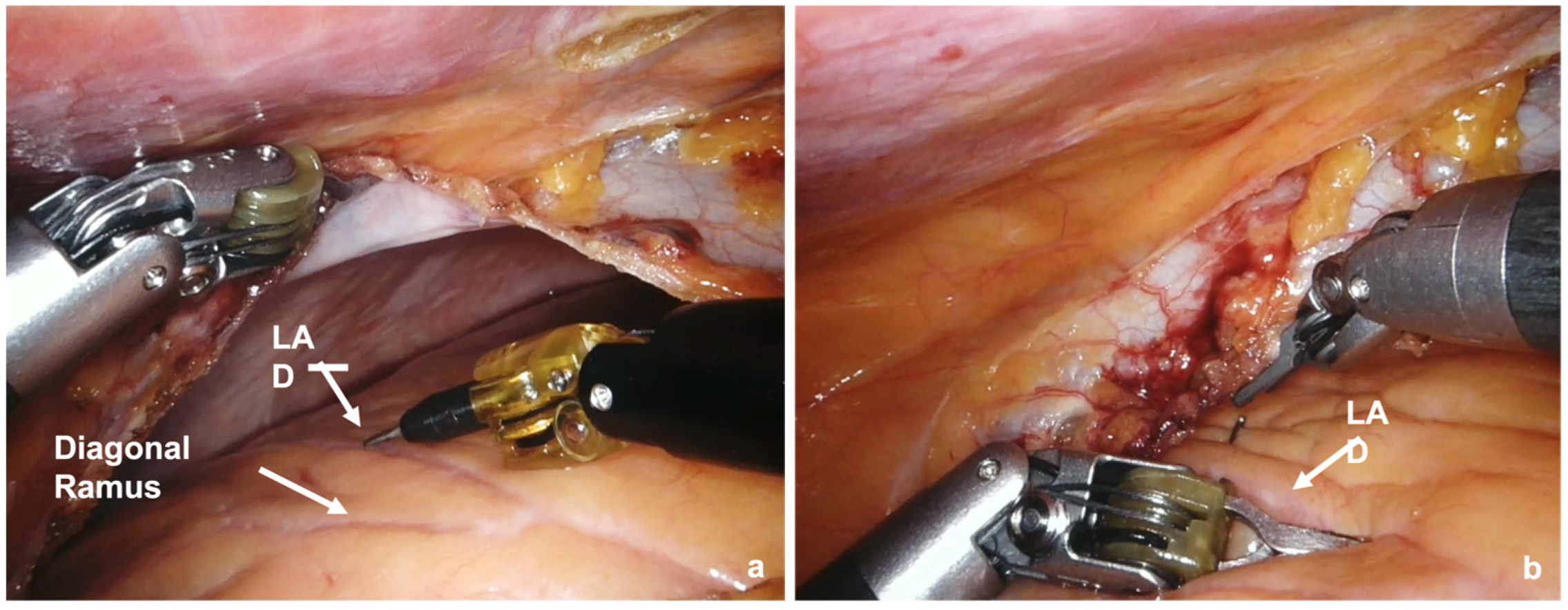
The LAD and a possible anastomosis site are identified, and a clip is placed near the point to guide the surgeon (
Figure 3).
The full length of the LITA graft is harvested using a low-energy monopolar electrocautery spatula and high-energy bipolar cautery forceps. The mammary artery is collected according to a skeletonized technique: the surgeon first opens the thoracic fascia surrounding the LITA and gently dissects the connective tissues between it and the medial mammary vein, then moving on to the lateral mammary vein. Bipolar cautery forceps are used to seal and divide small collateral branches, while metal clips are used for larger size branches.
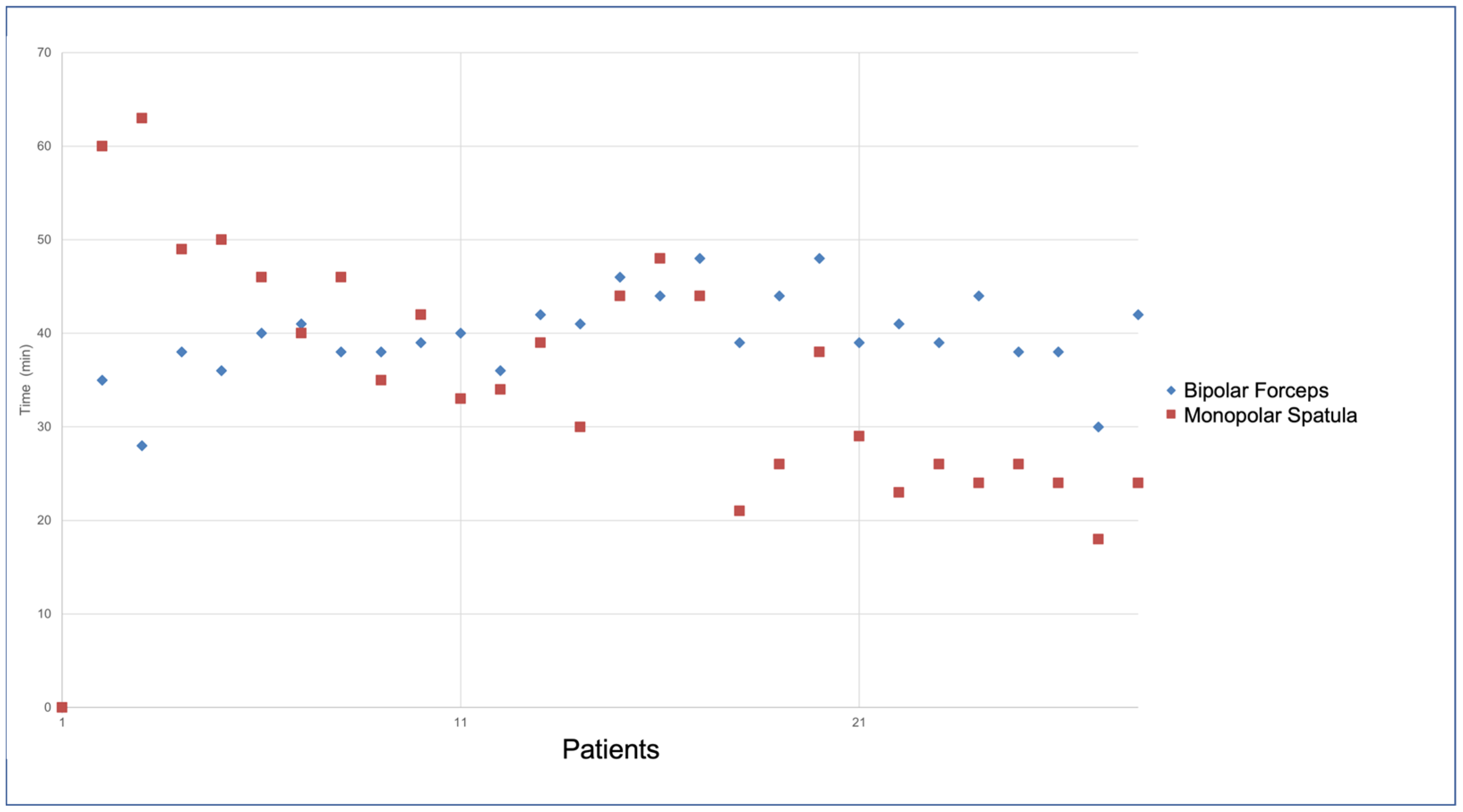
As depicted in
Figure 4, there was a shift in instrument use during the “learning curve”. In the first eleven patients, a monopolar spatula was preferred for tissue dissection and LITA harvesting; subsequently, we more frequently used bipolar forceps indiscriminately on the left or right robotic arms.
The time of instrument use was defined by consulting the My-Intuitive App and extrapolating the times from the records of individual cases.
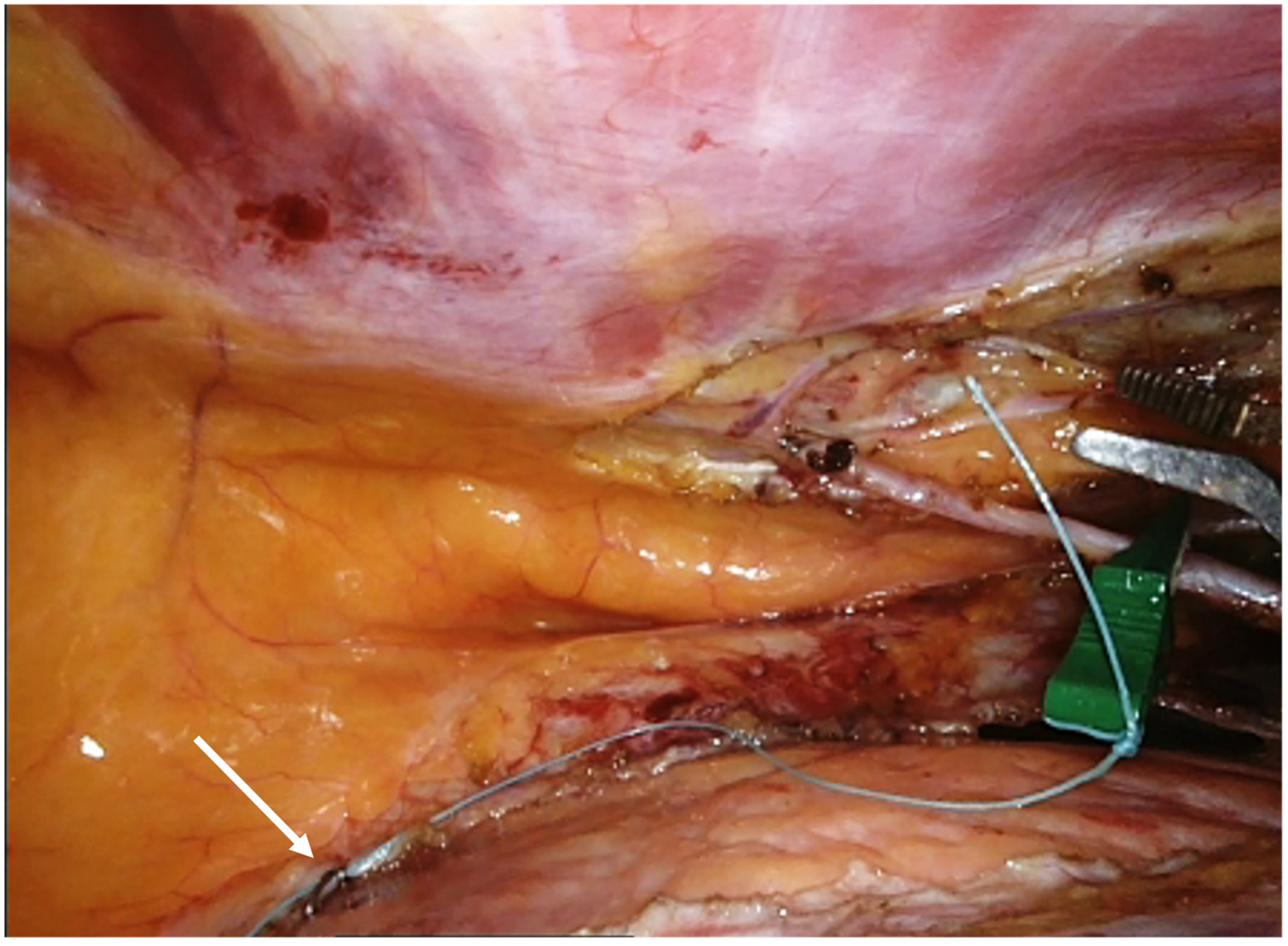
When the harvest is completed, LITA is closed with a bulldog and divided distally after administration of heparin: the remaining stump is sealed with metal clips.
To simplify mammary recovery during the next stage of coronary anastomosis, we tie a silk thread to the bulldog and then attach it to the pericardium (
Figure 5).
Based on the LAD site previously identified with a clip, an appropriate intercostal space is determined using a needle inserted through the chest wall, and mini-thoracotomy (4–5 cm) is generally performed at the fourth or fifth intercostal space.
A suction, a flexible stabilizer (Medtronic, Minneapolis, MN, USA, Octopus Nuvo Tissue stabilizer), is placed to reduce cardiac motion at the site of anastomosis using vacuum. The stabilizer is composed of a stiff arm with a removable blunt tip, a detachable stabilizer headlink with a ball joint that provides increased flexibility and range of motion, and a vacuum line extension. Initially, we position the head of the stabilizer on the heart, and through the site of third port (after its removal), we tunnel the vacuum line outside the thoracotomy. We insert the arm with the blunt tip through the same previous seat of the third port and, after removing the tip, we anchor the arm to the stabilizer head, activating the vacuum at −400 mmHg. The arm is fixed to an external support.
The off-pump anastomosis of LITA to LAD is realized under direct vision according to the surgeon’s standard technique. In our experience, we isolate and expose LAD, surrounding it with bioloop silicon string (Biomed, Ragusa, Italy), and use a coronary shunt (
Figure 6). Finally, intraoperative graft quality control is performed using a Transit Time Flowmeter (Mira-Q, Medistim, Plymouth, MN, USA), which, by establishing numerical parameters such as the pulsatility index (PI), diastolic filling (DF%), and mean flow, provides an accurate view of the dynamics of graft function.
In our experience, a fast-track protocol including rapid extubation, mobilization and reduction in ICU length of stay should be applied if the patient has specific characteristics, i.e., no bleeding, no inotropic drugs and hemodynamic stability, correct blood gas values, biochemical profile of blood tests in the normal range, and no neurological deficits.
We have observed a higher percentage of patients who are extubated directly in the operating room, resulting in early mobilization in the ICU a couple of hours after surgery. By minimizing the size of the incisions, the operative trauma for patients is limited: local infiltration with anesthetic drugs at the level of surgical sites further reduces postoperative pain. If the clinical status is stable and there is no bleeding, invasive devices such as a chest drain and bladder catheter are removed within 24 h, upon which the patient can leave the intensive care unit. The hospital length of stay is approximately five to seven days, wherein patients follow a physiotherapy program of cardiopulmonary rehabilitation. Finally, if no major complications occur, most patients are discharged home.
Clinical follow-up includes the visit and electrocardiographic and biochemical monitoring at about two months after surgery, then at six months and then annually.
TT-echocardiographic examination is scheduled at six months after surgery, while second-level examinations (stress TT Echo, coronary CT scan, etc.) are scheduled in case of the appearance of symptoms or alteration in symptoms from first-level examinations.
Patients in a hybrid revascularization protocol will complete the coronary angioplasty procedure with a timeline that depends on the characteristics of the coronary artery disease.
2.3. Pitfalls in RA-MIDCAB
While obesity, elderly, REDO operation or chronic pulmonary diseases were previously considered to be contraindications for robotic coronary surgery, the robotic population has now expanded, and there is no absolute contraindication even in “high risk” patients.
However, some pitfalls must be considered in RA-MIDCAB, particularly during preoperative evaluation.
Incorrect assessment of the anatomy of the chest wall and heart and the relationships between the two structures can result in errors in port placement. Radiological imaging is essential for planning surgical strategy. For example, in patients with a dilated left ventricle, a more lateral position of the ports may result in contact and conflict between the instruments and the beating heart, with instability of the instruments and possible influence on hemodynamic parameters. In addition, robotic LITA harvesting in this case present greater difficulty and a higher risk of injury to the artery.
Special care must be taken when choosing the site of the third port, where, in the second step, the coronary stabilizer arm will be placed. As previously described, a correct angle between the arm and the terminal movable portion of the stabilizer is important to ensure the greatest comfort while performing the anastomosis, and an error can make surgical action more difficult.
It is also important to consider the possible conflict between the robotic arms and the patient’s clavicle or left iliac spine.
If you feel that the port placement or intercostal space of the mini thoracotomy is not optimal, do not hesitate to modify the site to work as comfortably as possible.
Due to incorrect coronary CT scan evaluation, the intramural course of VATS may not be identified, with a subsequent need for conversion to sternotomy.
A second point concerns the robotic technology and the significance of the learning curve to acquire confidence with robotic tools. We note that, at the beginning of the experience, the absence of the tactile reflex on robotic instruments may result in damage to the mammary artery during harvesting, so it is necessary to work in a calm environment and with longer times than standard surgery, if necessary.
In the first step, RA-MIDCAB requires the use of CO2 to create a sealing system with an intrathoracic pressure of 6–10 mmHg and mono-lateral ventilation with left lung exclusion; a possible complication in this case is hemodynamic or respiratory instability with patient desaturation and hypotension. For this reason, the role of the anesthesiologist is crucial to the success of the procedure.
Finally, postoperative hemostasis not only at the site of the anastomosis but also at the port site and LITA bed is critical to avoid revisions for bleeding and transfusions. During LITA harvesting, CO2 insufflation controls any venous micro-bleeding, but after mini-thoracotomy is performed and intrathoracic pressure is reduced, bleeding may occur at any site, and a final check is important before closing the surgical sites.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}