



Design and Experiment with a Double-Roller Sweet Potato Vine Harvester


Abstract
:1. Introduction
2. Materials and Methods
2.1. Measurement of Sweet Potato Field Parameters during Harvest
2.2. Sweet Potato Vine Harvester Prototype Structure and Operating Principle
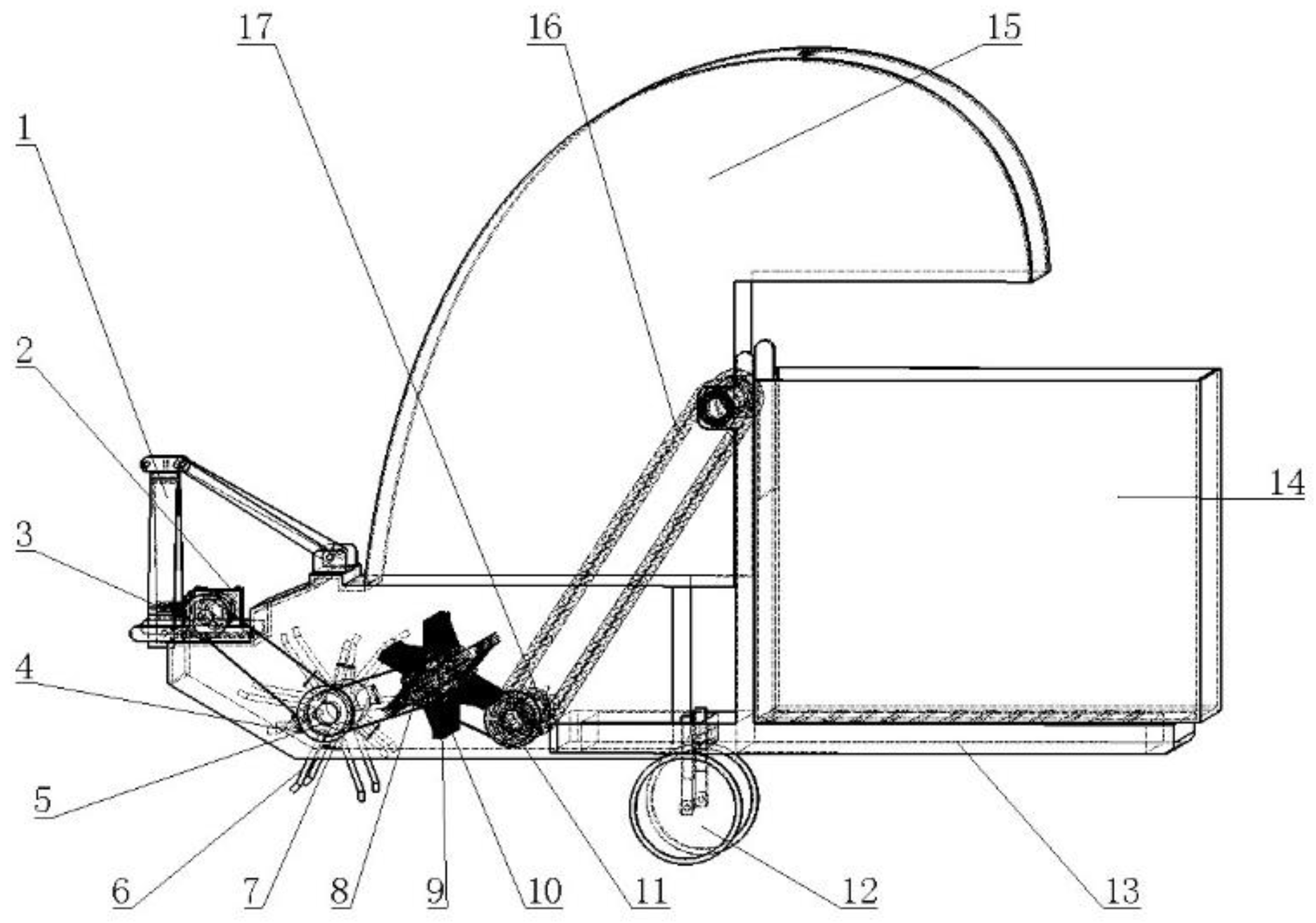
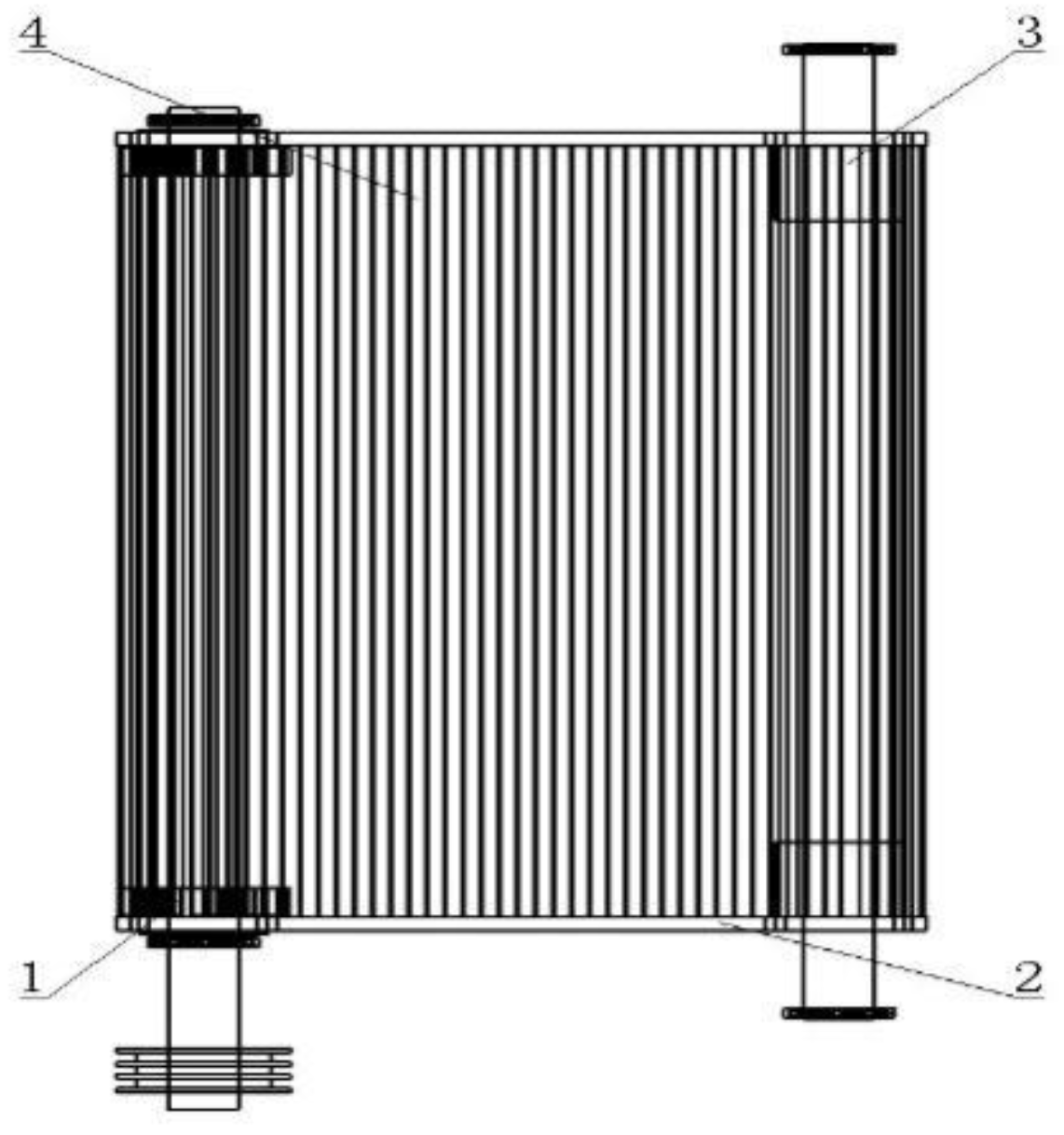
2.2.1. Structure
2.2.2. Working Principle
2.3. Key Part Design and Parameter Determination
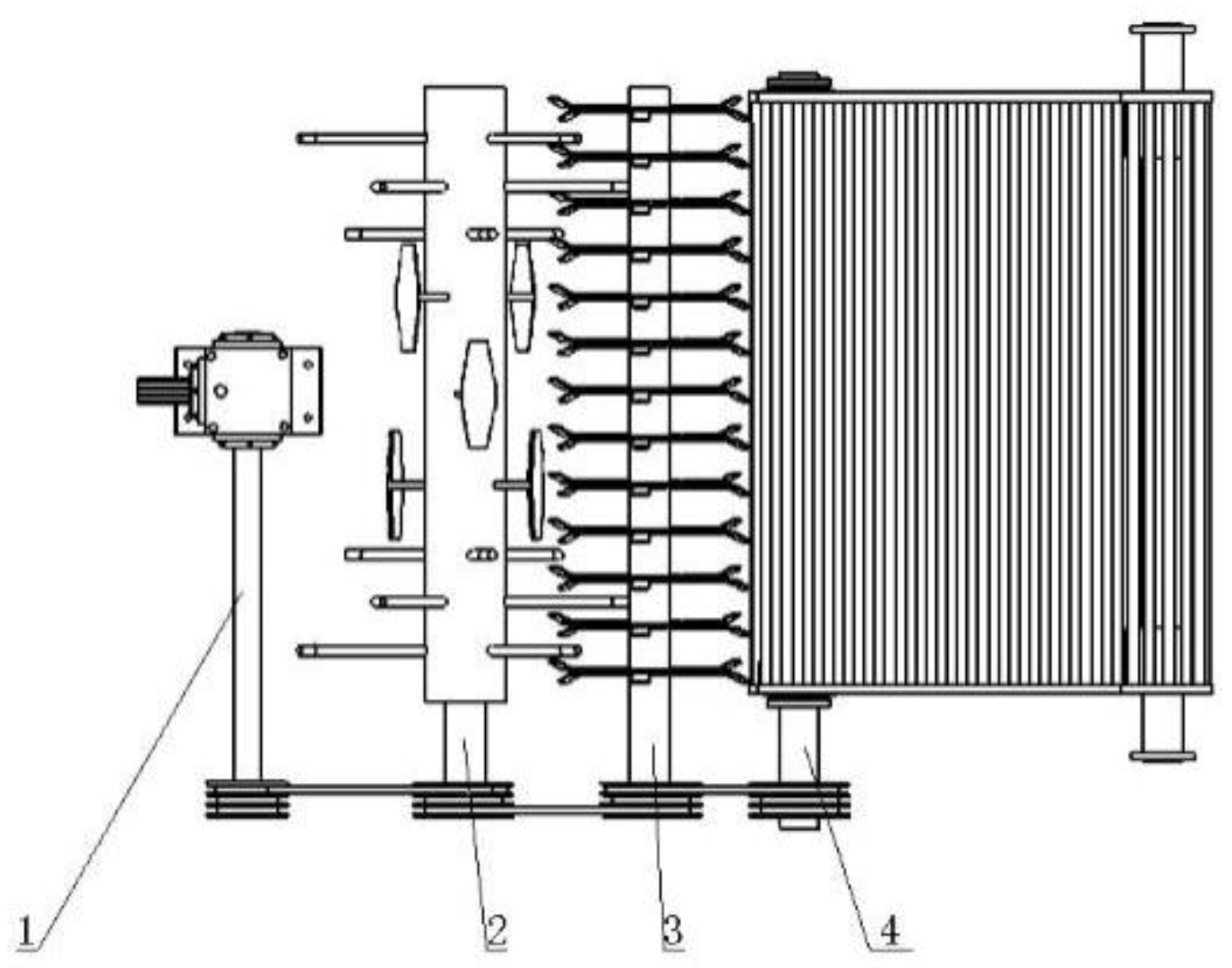
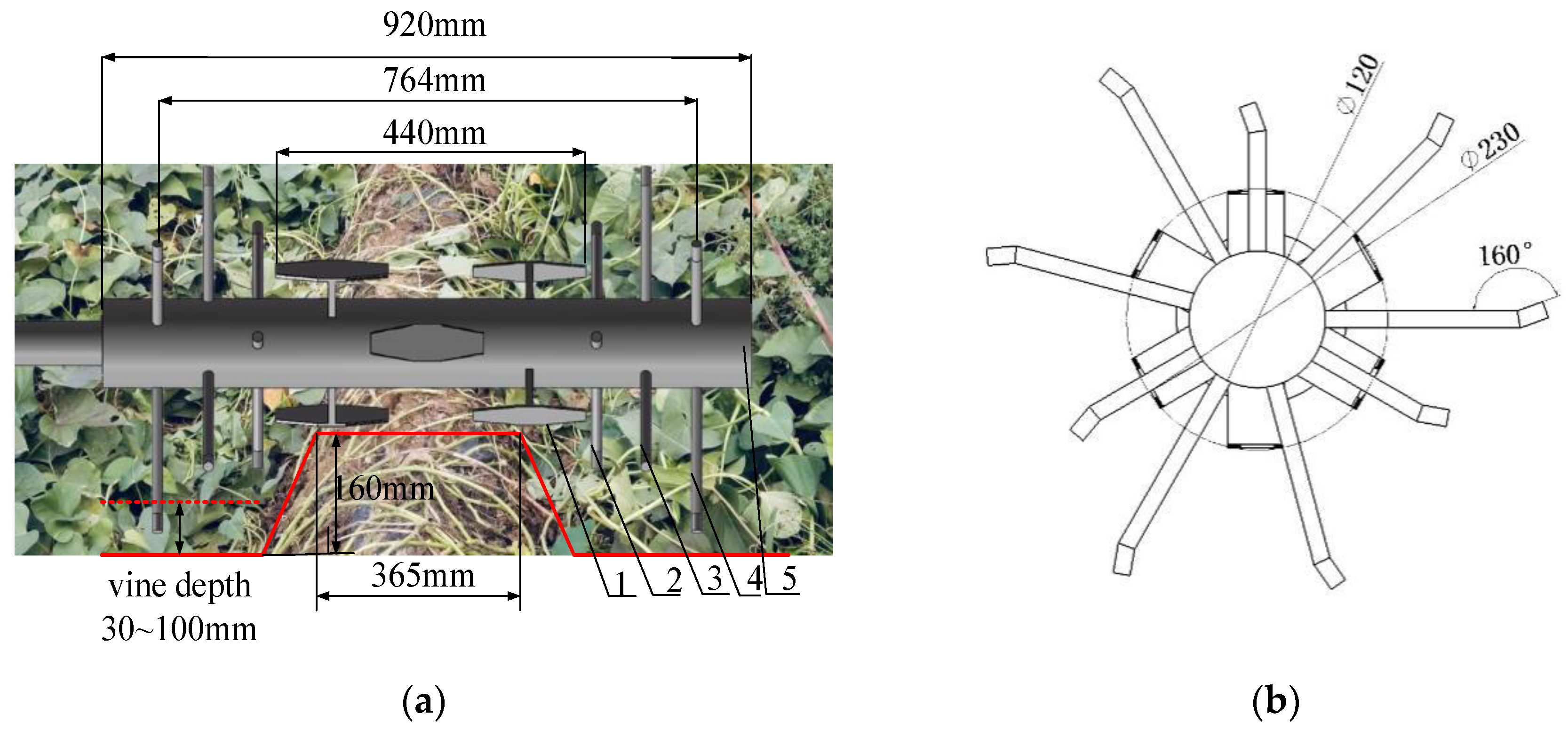
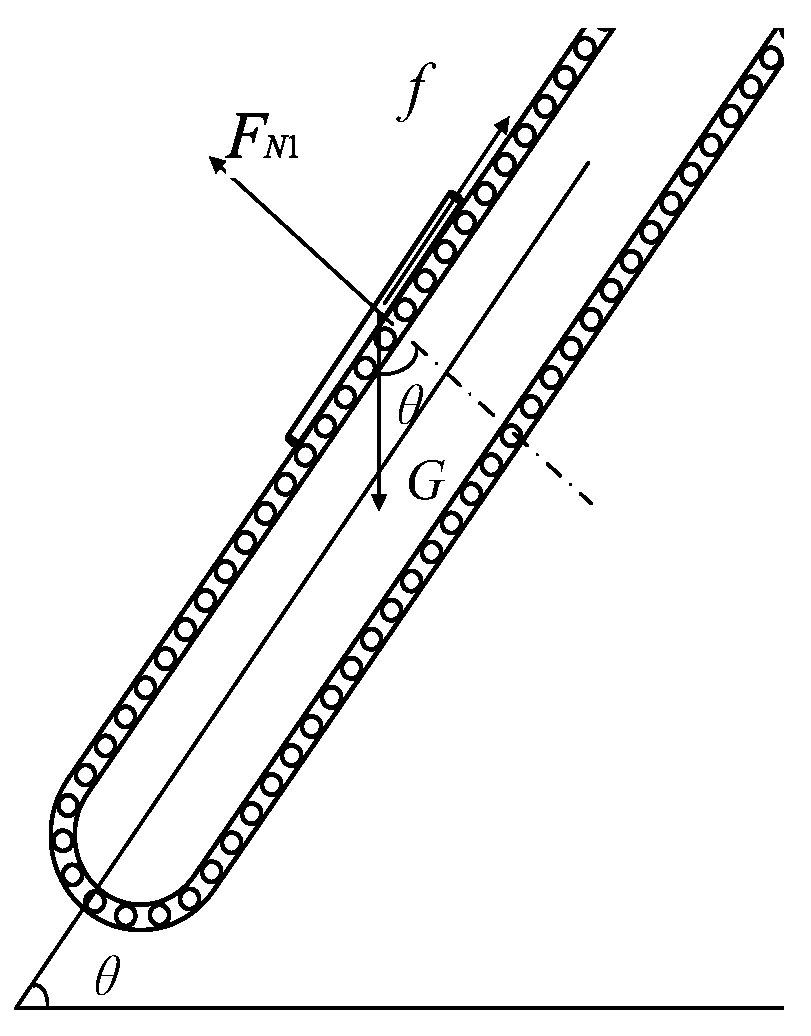
2.3.1. Vine Picking Device
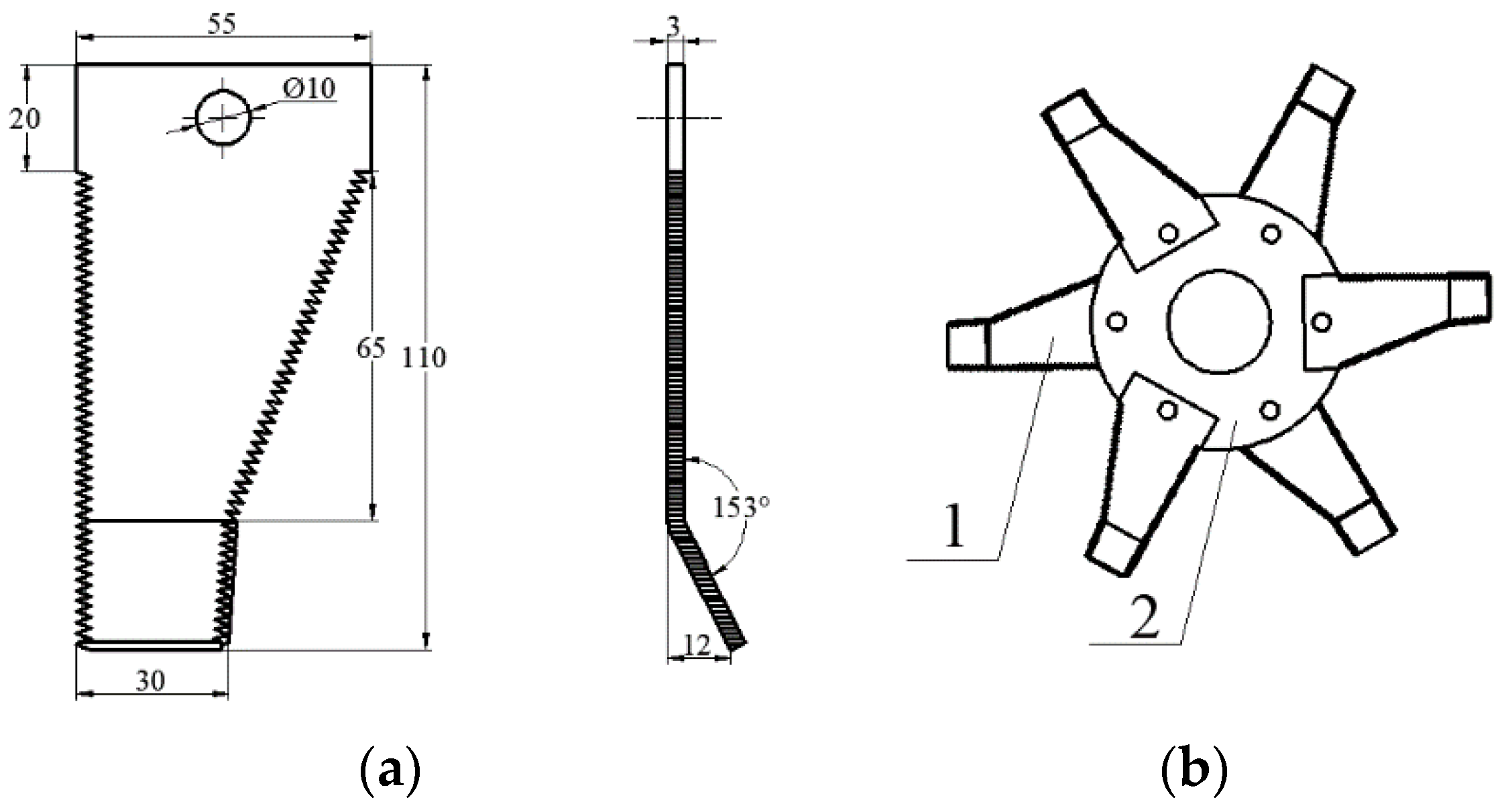
2.3.2. Vine Killing Device
2.3.3. Design of Transporting Device
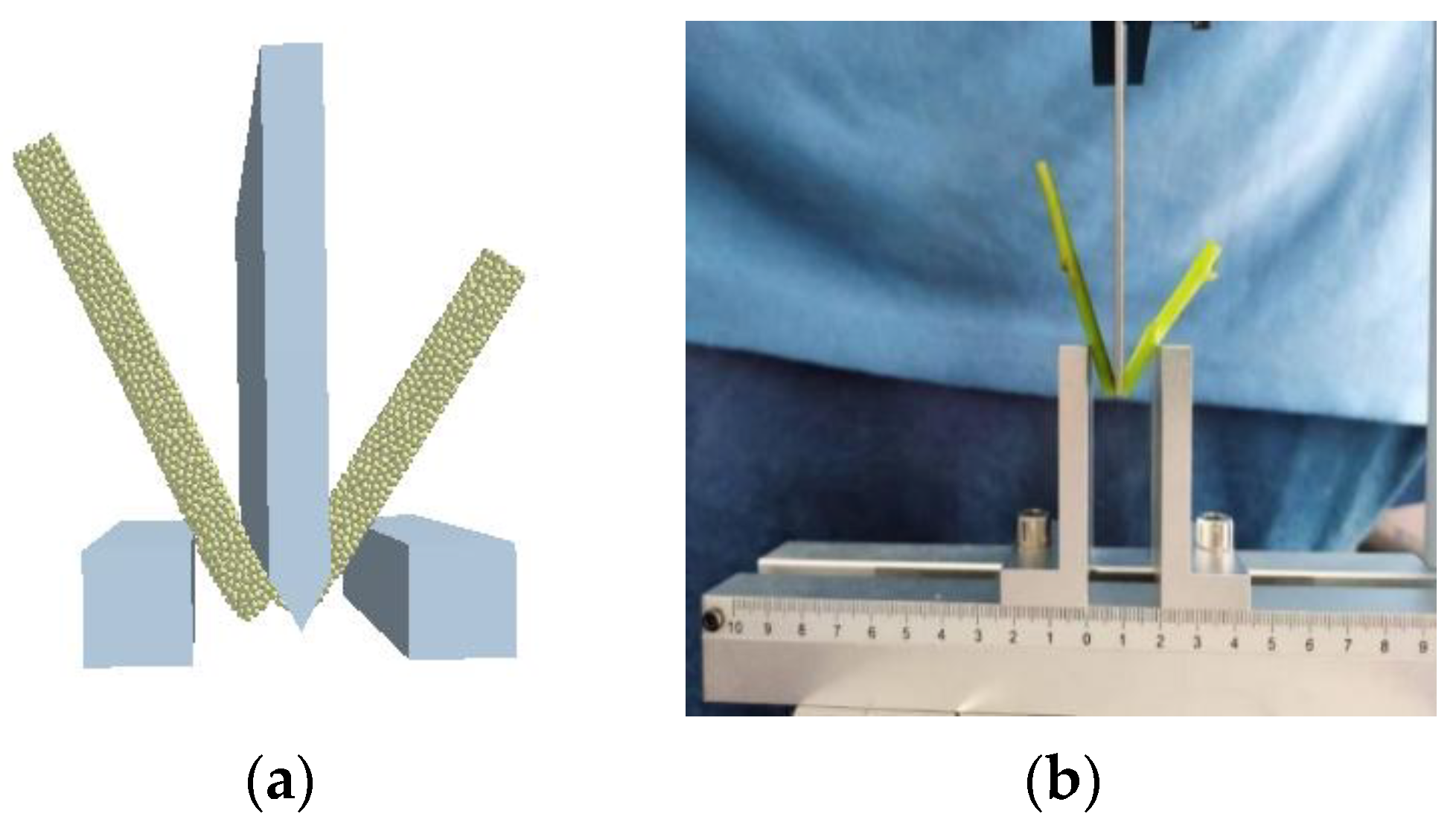
2.4. Discrete Element Simulation Test Modeling
2.5. Field Experiments
2.5.1. Conditions
2.5.2. Parameters and Methods
3. Results and Discussion
3.1. Simulation Analysis of Key Device Parameters
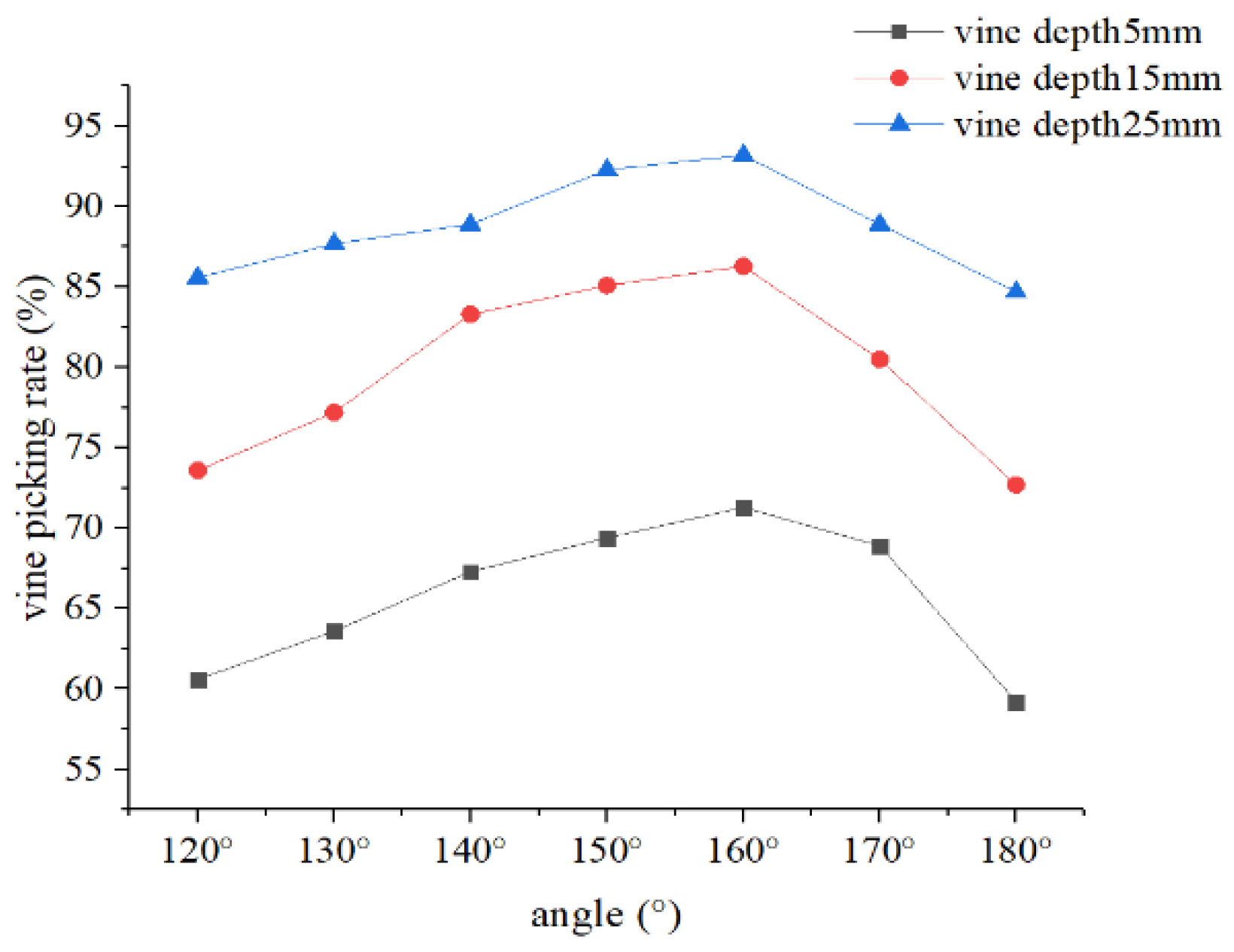
3.1.1. Simulation Analysis of Vine Picking Device
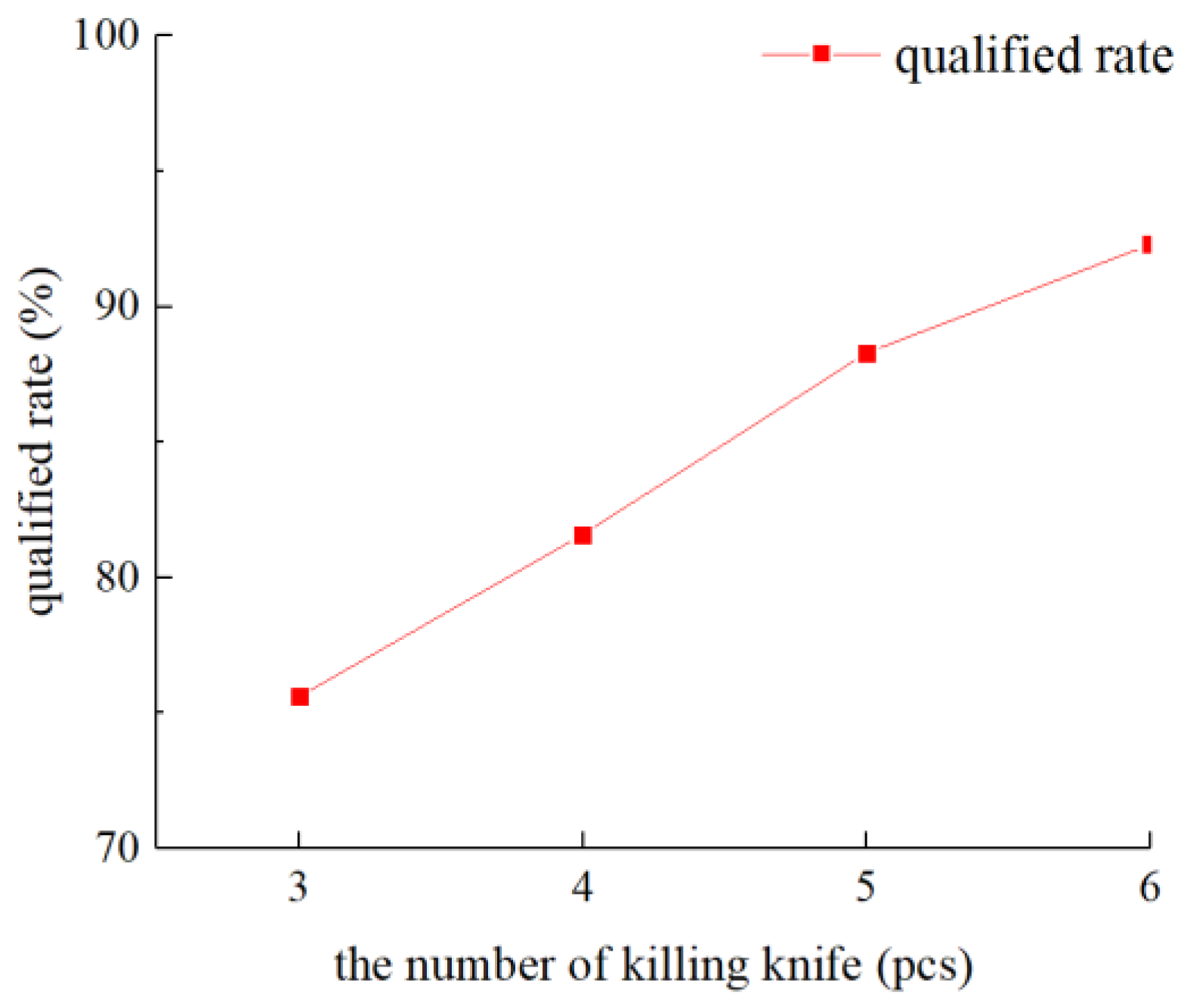
3.1.2. Simulation Analysis of Killing Vine
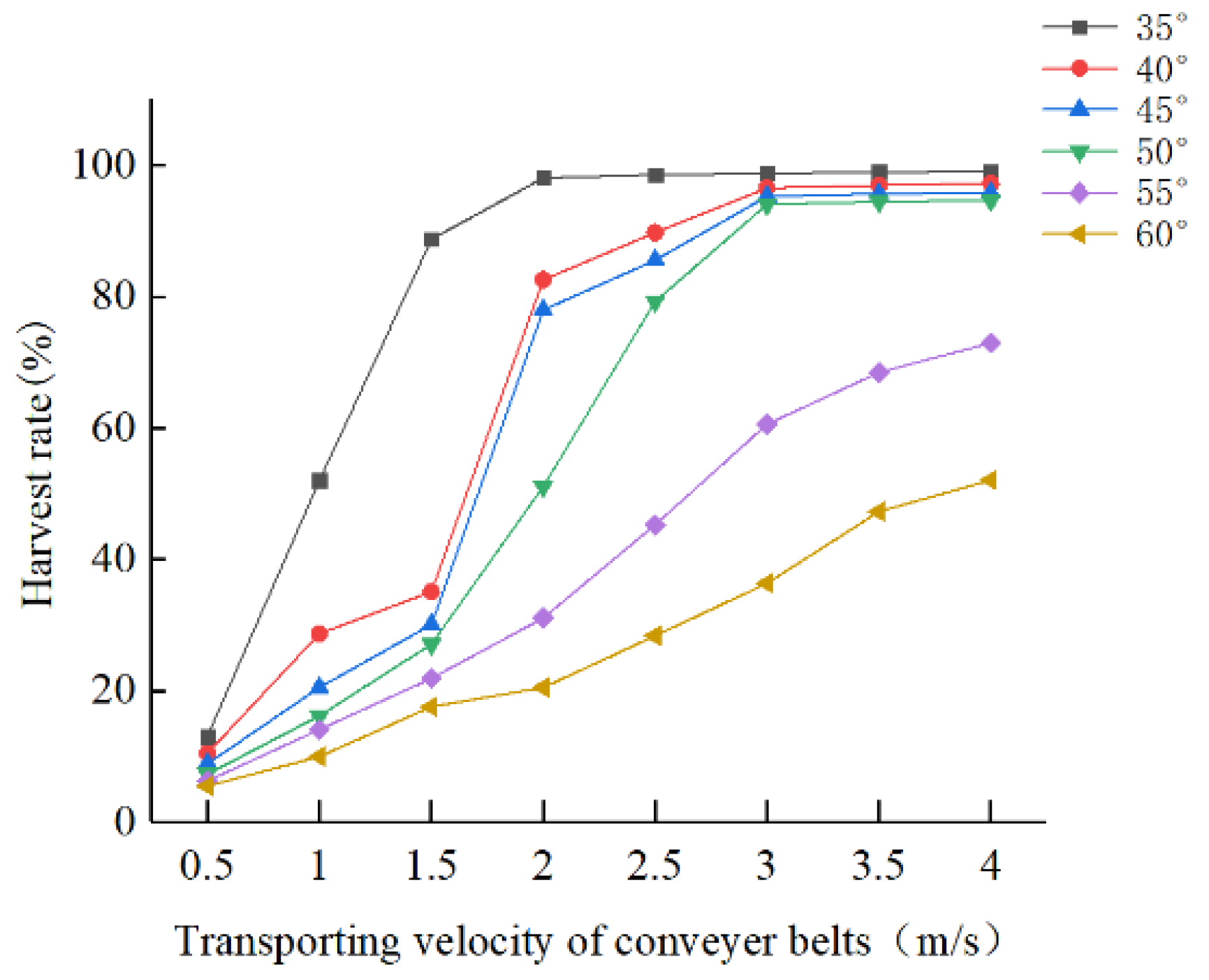
3.1.3. Simulation Analysis of Transporting Device
3.2. Results and Analysis of Field Experiments
3.2.1. Results of Field Experiments
3.2.2. Regression Equations and Analysis
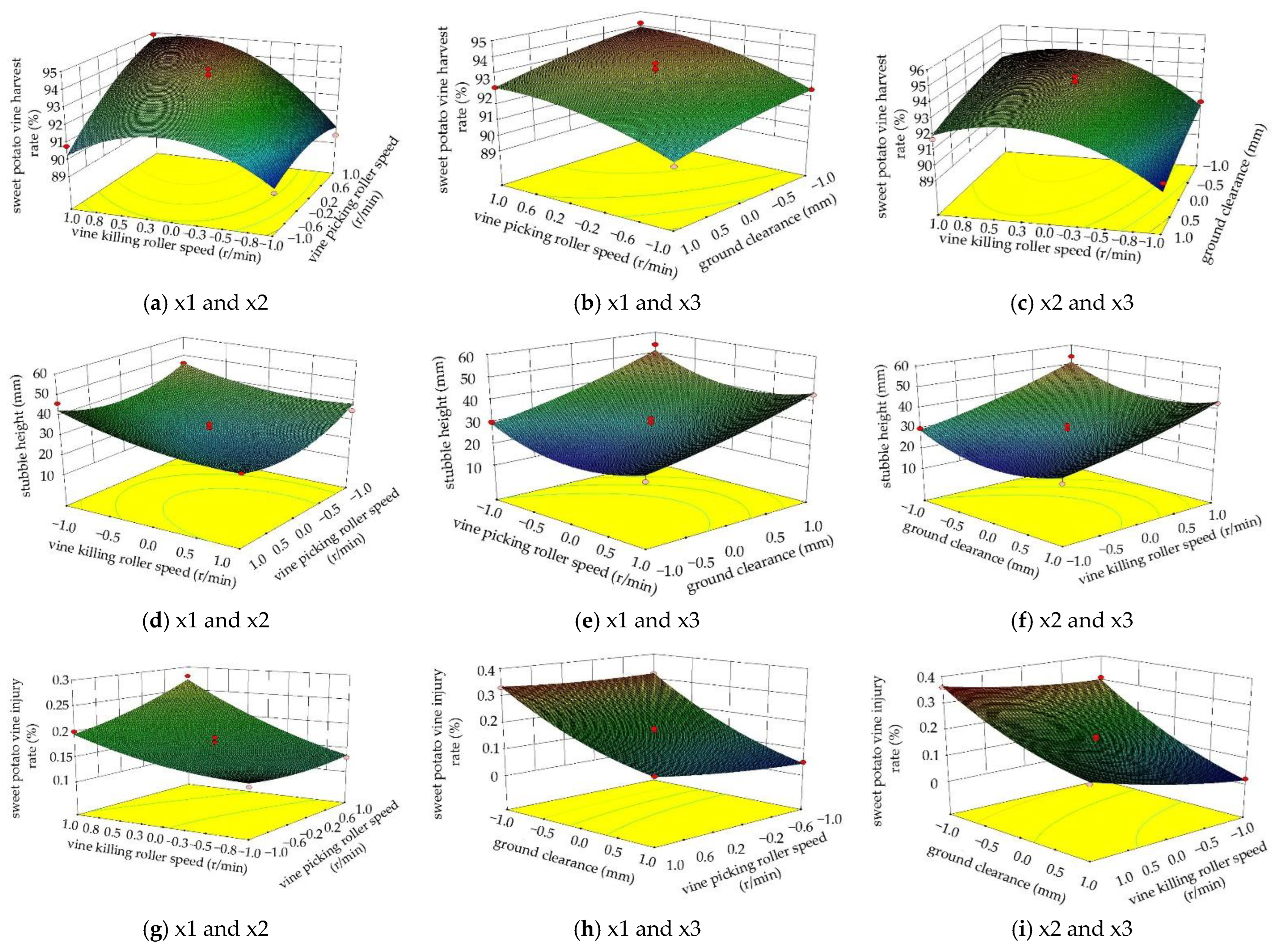
3.2.3. Analysis of Interactions
3.3. Model Optimization
3.4. Experimental Validation
4. Discussion
5. Conclusions
- (1)
- A double-roller sweet potato vine harvester was designed, in which the front and back rollers were used to pick and kill vines respectively. This harvester can operate well and solves the problem of sweet potato vine harvesting.
- (2)
- The discrete element numerical simulation method was used to carry out numerical simulation tests on the harvesting process, and it determined that the lengths of the vine picking poles from the outside to the inside are 175 mm, 150 mm and 105 mm, respectively, and that the angle of inclination of the end is 160°. Each knife plate has six killing knives; the angle of inclination of the transporting device is 50° and the conveying velocity is 3 m/s.
- (3)
- The optimal parameter combination is a vine picking roller rotation velocity of 716 r/min, a vine killing roller rotation velocity of 1960 r/min and a ground clearance of 16 mm, which results in a vine harvest rate of 93.1%, a stubble height of 29.5 mm and a sweet potato damage rate of 0.174%, with its working efficiency being 0.32 hm2/h.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, X.; Lu, J.; Wang, X.; Wang, K. Analysis on layout evolution of sweet potato production in China and its influencing factors. Chin. J. Agric. Resour. Reg. Plan. 2022, 43, 1–12. [Google Scholar]
- Megers, T.; Urge, M.; Nurfeta, A. Effects of feeding sweet potato vines as a supplement on feed intake, growth performance, digestibility and carcass characteristics of sidama goats fed a basal diet of natural grass hay. Trop. Anim. Health Prod. 2013, 45, 593–601. [Google Scholar] [CrossRef]
- Kakahy, A.N.; Ahmad, D.; Akhir, M.; Sulaiman, S.; Ishak, A. Effects of rotary mower blade cutting angles on the pulverization of sweet potato vine. Agric. Agric. Sci. Procedia 2014, 2, 95–101. [Google Scholar] [CrossRef]
- Pedrosa, C.E.; Andrade Júnior, V.C.; Pereira, R.C.; Dornas, M.F.; Azevedo, A.M.; Ferreira, M.A. Yield and quality of wilted sweet potato vines and its silages. Hortic. Bras. 2015, 33, 283–289. [Google Scholar] [CrossRef]
- Akhir, H.; Ahmad, D.; Rukunudin, I.H. Field performance of a two-row sweet potato harvester prototype in bris soil. Int. J. Eng. Technol. 2011, 8, 6–11. [Google Scholar]
- Smith, S.L.; Wright, M.E. A Preharvest vine disposal machine for sweet potatoes. Appl. Eng. Agric. 1994, 10, 321–326. [Google Scholar] [CrossRef]
- Wu, T. Design and Optimization of Walking Sweet Potato Vines Crushing and Returning Machine. Nanjing. Chin. Soc. Agric. Eng. 2017, 33, 10. [Google Scholar]
- Zheng, W.; Lü, Z.; Zhang, W. Design and test of single row sweet potato vine recycling machine. Trans. CSAE 2019, 35, 1–9. [Google Scholar]
- Mu, G.; Xin, Q.; Xuan, G. Design and experiment of knife roller and throwing device for sweet potato vine recycling machined. Trans. Chin. Soc. Agric. Mach. 2019, 50, 53–61. [Google Scholar]
- Barr, J.B.; Desbiolles, J.M.; Fielke, J.M.; Ucgul, M. Development and field evaluation of a high-speed no-till seeding system. Soil Tillage Res. 2019, 194, 104337. [Google Scholar] [CrossRef]
- Lenaerts, B.; Aertsen, T.; Tijskens, E.; De Ketelaere, B.; Ramon, H.; De Baerdemaeker, J.; Saeys, W. Simulation of grain-straw separation by discrete element modeling with bendable straw particles. Comput. Electron. Agric. 2014, 101, 24–33. [Google Scholar] [CrossRef]
- Leblicq, T.; Smeets, B.; Ramon, H.; Saeys, W. A discrete element approach for modelling the compression of crop stems. Comput. Electron. Agric. 2016, 123, 80–88. [Google Scholar] [CrossRef]
- Byum, J.H.; Nam, J.S.; Choe, J.S.; Inoue, E.; Okayasu, T.; Kim, D.C. Analysis of the separating performance of a card cleaner for pepper harvester using EDEM software. J. Fac. Agric. 2018, 63, 347–354. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, T.; Tian, F.; Wang, G.; Wang, W.; Wu, S.; Hu, L. Design and test on double-roller sweet potato vine crushing and returning machine. J. Appl. Sci. Eng. 2021, 25, 637–650. [Google Scholar]
- Boac, J.M.; Casada, M.E.; Maghirang, R.G.; Harner, J.P. Material and interaction properities of selected grains and oilseeds for modeling discrete practices. Trans. ASABE 2010, 53, 1201–1216. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Leblicq, T.; Smeets, B.; Vanmaercke, S.; Ramon, H.; Saeys, W. A discrete element approach for modelling bendable crop stems. Comput. Electron. Agric. 2016, 124, 141–149. [Google Scholar] [CrossRef]
- Zheng, W.X.; Lü, Z.Q.; Lu, Y.; Liu, Z.D.; Cheng, X.X. Shear properties test of sweet potato vine in mature period. Int. Agric. Eng. J. 2017, 26, 204–212. [Google Scholar]
- Zeng, L.; Cao, Y.; Zhong, X.; Wang, W.; Huang, W. Design of stem-leaf separation device for sugar canes. China South. Agric. Mach. 2021, 52, 36–38. [Google Scholar]
- Available online: https://www.altair.com/edem/ (accessed on 20 June 2022).
- Lü, H.; Mu, G.; Zheng, W.; Zhang, W.; Lü, Z.; Zhang, T. Gas-solid coupling simulation and experimental optimization of throwing device of sweet potato seedling recycling machine. Trans. Chin. Soc. Agric. Mach. 2021, 52, 213–222. [Google Scholar]
- Available online: https://www.solidworks.com/ (accessed on 28 June 2022).
- Available online: https://www.statease.com/software/design-expert/ (accessed on 29 June 2022).
- GB/T7714—2005; Measuring Methods for Agricultural Machinery Testing Conditions-General Rules. Standards Press of China: Beijing, China, 2008.
- Box, G.E.P.; Hunter, W.G.; Hunter, J.S. Statistics for Experiments: An Introduction to Design. Data Analysis and Model Building. Med. Phys. 1981, 8, 526–527. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Range | Mean |
|---|---|---|
| Top width of ridge/mm | 350.2~380.4 | 365.2 |
| Ridge height/mm | 151.3~170.2 | 160.4 |
| Ridge distance/mm | 876.5~900.9 | 899.3 |
| Bottom width of ridge/mm | 665.3~693.4 | 682.2 |
| Sweet potato vine length/mm | 1500~2000 | 1700 |
| Sweet potato vine diameter/mm | 5~7 | 6 |
| Sweet potato vine depth/mm | 30~100 | 60 |
| Simulation Parameters | Level |
|---|---|
| Stem density of sweet potato/(kg·m−3) | 998.91 |
| 45 steel density/(kg·m−3) | 7850 |
| Poisson’s ratio for sweet potato stem | 0.28 |
| 45 steel Poisson’s ratio | 0.3 |
| Shear modulus of sweet potato stem/MPa | 6 |
| Shear modulus of 45 steel/MPa | 70,000 |
| Collision recovery coefficient of sweet potato stem–sweet potato stem | 0.32 |
| Impact recovery coefficient of sweet potato stem−45 steel | 0.44 |
| The static friction coefficient of sweet potato stem–sweet potato stem | 0.41 |
| The static friction coefficient of sweet potato stem−45 steel | 0.7 |
| Rolling friction coefficient of sweet potato stem–sweet potato stem | 0.17 |
| Rolling friction coefficient of sweet potato stem−45 steel | 0.15 |
| Coded Values | Vine Picking Roller Velocity x1/(r·min−1) | Vine Killing Roller Velocity x2/ (r·min−1) | Ground Clearance x3/mm |
|---|---|---|---|
| −1 | 550 | 1600 | 5 |
| 0 | 675 | 1900 | 15 |
| 1 | 800 | 2200 | 25 |
| Number | Test Factors | Response Value | ||||
|---|---|---|---|---|---|---|
| x1 | x2 | x3 | Y1/% | Y2/mm | Y3/% | |
| 1 | 0 | 0 | 0 | 93.5 | 30 | 0.16 |
| 2 | 0 | 0 | 0 | 94.1 | 32 | 0.15 |
| 3 | 1 | −1 | 0 | 89.5 | 46 | 0.13 |
| 4 | 0 | 0 | 0 | 92.3 | 27 | 0.18 |
| 5 | 0 | 0 | 0 | 94.4 | 25 | 0.17 |
| 6 | 1 | 1 | 0 | 94.9 | 30 | 0.28 |
| 7 | 0 | 0 | 0 | 94 | 28 | 0.16 |
| 8 | −1 | 1 | 0 | 90.8 | 35 | 0.2 |
| 9 | 1 | 0 | −1 | 95.2 | 22 | 0.33 |
| 10 | 0 | 1 | −1 | 93.2 | 20 | 0.36 |
| 11 | 0 | −1 | −1 | 91.4 | 29 | 0.31 |
| 12 | 0 | 1 | 1 | 91.7 | 41 | 0.14 |
| 13 | 0 | −1 | 1 | 90 | 45 | 0.02 |
| 14 | 1 | 0 | 1 | 93.1 | 43 | 0.11 |
| 15 | −1 | 0 | −1 | 92.5 | 30 | 0.32 |
| 16 | −1 | −1 | 0 | 89.5 | 46 | 0.13 |
| 17 | −1 | 0 | 1 | 90.6 | 54 | 0.05 |
| Source of Variance | Y1 | Y2 | Y3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sum of Squares | Freedom | F Value | p Value | Sum of Squares | Sum of Squares | F Value | p Value | Sum of Squares | Freedom | F Value | p Value | |
| Model | 51.45 | 9 | 9.28 | 0.0039 ** | 1435.33 | 9 | 12.95 | 0.0014 ** | 0.16 | 9 | 135.18 | <0.0001 ** |
| x1 | 10.81 | 1 | 17.54 | 0.0041 ** | 72 | 1 | 5.85 | 0.0462 * | 2.81 × 10−3 | 1 | 22 | 0.0022 ** |
| x2 | 13 | 1 | 21.1 | 0.0025 ** | 200 | 1 | 16.24 | 0.005 ** | 0.019 | 1 | 148.7 | <0.0001 ** |
| x3 | 5.95 | 1 | 9.66 | 0.0171 * | 840.5 | 1 | 68.25 | <0.0001 ** | 0.13 | 1 | 977.65 | <0.0001 ** |
| x1x2 | 4.2 | 1 | 6.82 | 0.0349 * | 6.25 | 1 | 0.51 | 0.4993 | 1.60 × 10−3 | 1 | 12.51 | 0.0095 ** |
| x1x3 | 1.00 × 10−2 | 1 | 0.016 | 0.9022 | 2.25 | 1 | 0.18 | 0.6819 | 6.25 × 10−4 | 1 | 4.89 | 0.0627 |
| x2x3 | 2.50 × 10−3 | 1 | 4.06 × 10−3 | 0.951 | 6.25 | 1 | 0.51 | 0.4993 | 1.23 × 10−3 | 1 | 9.58 | 0.0174 * |
| x12 | 1.54 | 1 | 2.5 | 0.1578 | 216.76 | 1 | 17.6 | 0.0041 ** | 2.70 × 10−4 | 1 | 2.11 | 0.1899 |
| x22 | 14.88 | 1 | 24.14 | 0.0017 * | 56.87 | 1 | 4.62 | 0.0687 | 7.12 × 10−4 | 1 | 5.57 | 0.0504 |
| x32 | 0.18 | 1 | 0.29 | 0.6087 | 11.81 | 1 | 0.96 | 0.36 | 3.92 × 10−3 | 1 | 30.63 | 0.0009 ** |
| Residual | 4.31 | 7 | 86.2 | 7 | 8.95 × 10−4 | 7 | ||||||
| Lack of fit | 1.58 | 3 | 0.77 | 0.5669 | 57 | 3 | 2.6 | 0.1891 | 3.75 × 10−4 | 3 | 0.96 | 0.4924 |
| Lack of fit | 2.73 | 4 | 29.2 | 4 | 5.20 × 10−4 | 4 | ||||||
| Total | 55.77 | 16 | 1521.53 | 16 | 0.16 | 16 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, G.; Wang, W.; Zhang, T.; Hu, L.; Zheng, W.; Zhang, W. Design and Experiment with a Double-Roller Sweet Potato Vine Harvester. Agriculture 2022, 12, 1559. https://doi.org/10.3390/agriculture12101559
Mu G, Wang W, Zhang T, Hu L, Zheng W, Zhang W. Design and Experiment with a Double-Roller Sweet Potato Vine Harvester. Agriculture. 2022; 12(10):1559. https://doi.org/10.3390/agriculture12101559
Chicago/Turabian StyleMu, Guizhi, Wanshuai Wang, Tingting Zhang, Lianglong Hu, Wenxiu Zheng, and Wanzhi Zhang. 2022. "Design and Experiment with a Double-Roller Sweet Potato Vine Harvester" Agriculture 12, no. 10: 1559. https://doi.org/10.3390/agriculture12101559
APA StyleMu, G., Wang, W., Zhang, T., Hu, L., Zheng, W., & Zhang, W. (2022). Design and Experiment with a Double-Roller Sweet Potato Vine Harvester. Agriculture, 12(10), 1559. https://doi.org/10.3390/agriculture12101559