1. Introduction
Rice is considered the main food crop, with over 50% of the world’s population consuming rice [
1]. Rice transplanting is a traditional rice cultivation method used in Asia with a long history, which can shorten the growth period of rice and ensure the number of seedlings in the field is conducive to a high and stable yield [
2]. Rice transplanting is a highly labor-intensive and water-intensive method of cultivation [
3,
4,
5]. However, there is shortage of labor resources owing to the development of the economy and society, and labor costs have gradually increased. As a result, agriculture has become less profitable [
6,
7]. Dry direct-seeded rice is an important choice for solving the shortage of labor and water resources [
8,
9]. Singh et al. [
10] reported that compared to rice transplanting, direct-seeded rice could save 56% labor, 73% mechanical work, and 25% irrigation water. Therefore, direct-seeded rice technology could increase farmers’ income and save natural resources. Furthermore, because this technology directly sows seeds into the field without seedling raising or transplanting, the process is simple and easy to operate [
11,
12]. Previous studies show that the yield of dry direct-seeded rice can be compared to that of the rice transplanting method [
13,
14,
15]. However, because dry direct-seeded rice is more susceptible to climate and weeds, field management is an important factor that affects the yield [
16,
17,
18]. To solve the problems of direct-seeded rice, foreign and domestic experts have carried out research on dry direct-seeded rice with film mulching [
19,
20].
The quality of the seedbed affects the sowing quality and growth of the rice [
21,
22], and dry direct-seeded rice with film mulching requires soft, fine, and smooth seedbed soil. However, in some areas of northern China, the soil is heavy with clay and stones, which significantly affects the normal operation of the planter as well as the growth of the rice. Moreover, owing to the hardness of the stone, when the planter, plastic film, and stone interact, the plastic film is scraped and broken, which significantly affects the performance of the plastic film.
In view of the problems of dry direct-seeded rice with film mulching in northern China, most research adopts high-power tractors that support stone-picking machines and tools for deep scavenging, or uses a sieve device to wash the soil. However, the above devices consume a large amount of power during operation, resulting in soil layer chaos and soil structure destruction. These devices focus on the number of stones picked up, and seldom care about how many stones are present in the topsoil, because disturbances in the deep soil can turn the bottom stones over to the surface of the soil, which does not solve the problems of stones in the seedbed. Although several studies have been conducted on the stone-removal equipment of the minimum soil layer, namely, the seeding area, in seedbeds in northern China, there are no relevant reports on the effect of the machines’ working parameters on the operation effect and performance.
Therefore, this study developed a seedbed clearing and shaping device for dry direct-seeded rice aiming at the complex structure, high power, and large soil disturbance of the existing equipment. The proposed device can be used to remove stones in the seeding area, break soil blocks, and for soil leveling and groove forming, which works on the top soil without disturbing the deep soil to clean the sowing layer of the soil. Furthermore, we carried out the optimal design of the key structural components, and simulation experiments and field tests were conducted to analyze its operation performance and working effect to obtain the optimal combination of parameters of the device. The proposed device provides new technology and equipment for the development of precision agriculture.
2. Structure and Working Principles of the Proposed Device
2.1. Machine Structure
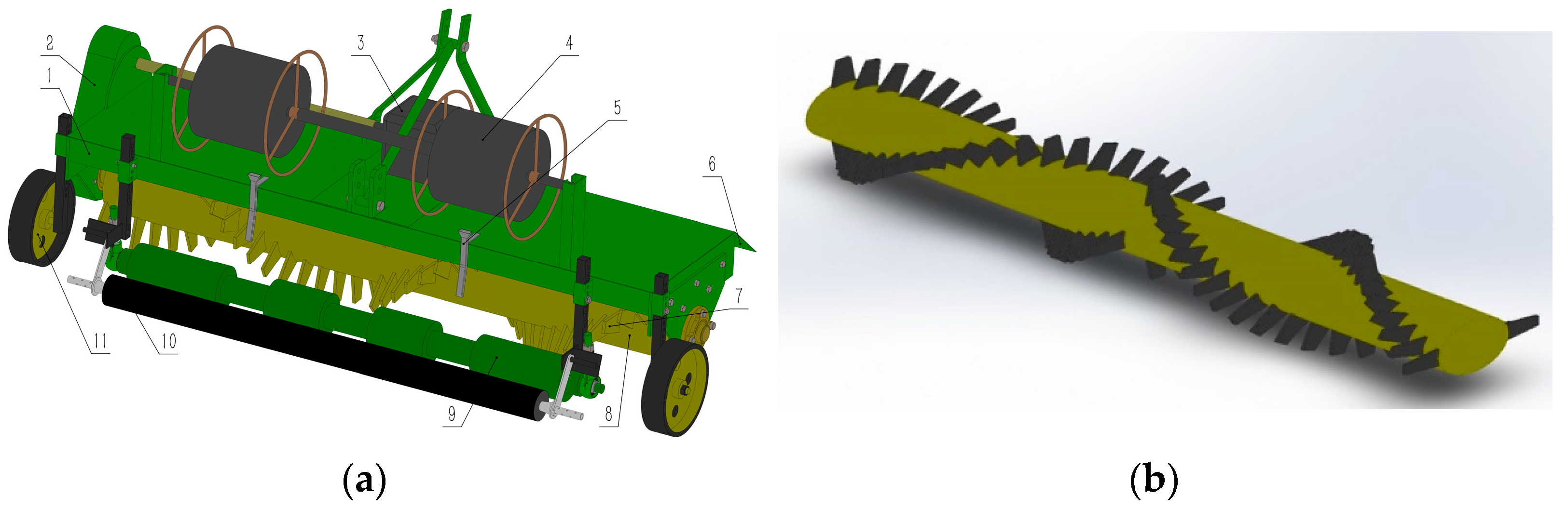
Figure 1 shows the overall structure of the proposed seedbed clearing and shaping device for dry direct-seeded rice. The device comprises a frame, belt-driving system, gear reducer, drip irrigation belt, guiding tube of the drip irrigation belt, protective board, soil-mixing tooth, roller, groove-pressing roller, plastic film, and a depth-limiting wheel, along with other components.
2.2. Working Principle
The proposed device for dry direct-seeded rice is connected to a tractor using the trifilar suspension system, and parallel four-bar linkages are connected to sowing devices; each set of sowing devices can float freely depending on the terrain.
Figure 2 shows the working principle of the proposed device. According to the agronomic requirements of rice cultivation, the parameters of the corresponding work module, such as the height of the groove-pressing roller and depth-limiting wheel, should be adjusted prior to field operation.
The power output shaft of the tractor provides an adequate running drive for the seedbed clearing and shaping device. The stones and soil blocks in the topsoil are thrown upward and forward using the rotary roller, and a part of the soil block is broken by collision with the soil-mixing tooth. Stones and soil blocks are conveyed to both sides of the device by the soil-mixing tooth with a spiral pattern distribution on the roller; the loose earth is not transported. The clearing operations are directed only at the sowing soil layer to reduce the disturbance to the deep soil and stones. When the groove-pressing roller rotates forward, it fills the shallow gullies and presses out the seeding furrow with a depth of 30–40 mm, thereby forming four regular seeding furrows and five ridges. Then, the seeds are sown in the corresponding seeding furrow, so the device provides a high-quality seedbed for the seeding operations and growth of rice.
The parameters of the proposed device have a direct effect on the quality of the seedbeds, and hence, are a key component of the planter for achieving the process of seedbed stone and soil block clearing and seeding furrow shaping. Therefore, according to the agronomic requirements of rice cultivation in the area of northern China, the sowing depth should be between 15 and 25 mm; that is, the stones and soil blocks should be removed from the 50 mm soil layer to form a clean seeding area, and the working depth of the soil-mixing tooth can be adjusted between 0 and 100 mm by controlling the height of the depth-limiting wheel. The width of the seeding furrow is determined to 200 mm based on the agronomy requirements (large and small row spacings are 250 mm and 120 mm, respectively) and combining the actual size of the sowing device to improve the utilization rate of natural rainfall, the depth of the seeding furrow is selected as 35 mm depending on the results of the preliminary experiments.
2.3. Structural Design of Critical Component
The soil-mixing tooth and roller are the key components of the device, since they directly affect the effects of seedbed clearing and shaping. The device adopts a harrow-type mechanism to pick up stones. The soil-mixing teeth are distributed on the roller according to the double-helix rule, and both sides of the helix are configured according to the right and left hands, respectively. The stones and soil blocks move to the two sides for the clearing of the seedbed.
2.3.1. Kinematic Equation of the Endpoint of the Soil-Mixing Tooth
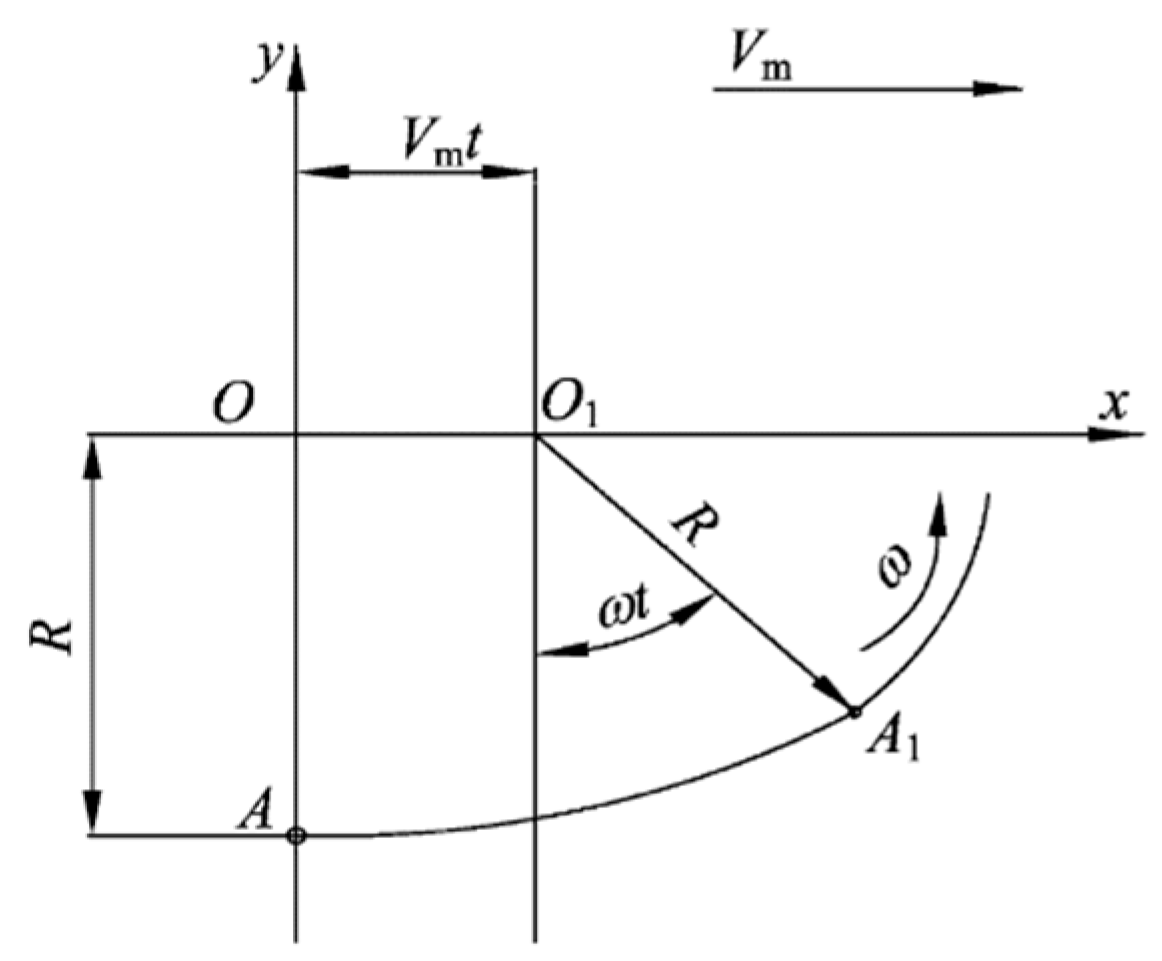
A Cartesian coordinate system is established, and the center of the roller is considered the original point O, whereas the forward direction and the direction perpendicular to the ground of the tractor is the positive direction of the X- and Y-axes, respectively. After time
t, the tractor drives the roller from the original point O to O
1. The endpoint of the soil-mixing tooth was rotated by
ωt degrees from point A to point
A1, whose coordinates are
A1(x,y).
Figure 3 shows the motion process. The parametric equation of the endpoint
A1(x,Y) of the soil-mixing tooth is the equation with time
t as the variable, as shown in Equation (1). The trajectory of the endpoint of the soil-mixing tooth is an inverted trochoid formed by combining horizontal linear and circular motions.
Vm—speed of tractor, m/s;
—radius of turn at the endpoint of the soil-mixing tooth, m;
ω—rotational angular velocity of the soil-mixing tooth, rad/s;
t—time, s.
2.3.2. Operating Speed Ratio
Operating speed ratio
λ is the ratio of the line speed of the endpoint of the soil-mixing tooth and the speed of the tractor, which is crucial for the normal operation of the device:
Substituting Equation (2) into Equation (1), we get:
According to Equation (3), if
,
ω and
λ are known, the coordinates of the endpoint of the soil-mixing tooth can be calculated to obtain the motion trajectory.
Figure 4 shows
, ω = 3.2π, and the motion trajectory of the endpoint of the soil-mixing tooth when the operation speed ratio λ > 1, λ = 1 and λ > 1. As seen from the figure, when λ ≤ 1, the motion trajectory is a short trochoid without overlap, that is, there is a soil pushing and leakage area, and the device cannot work normally. When λ > 1, the motion trajectory is a trochoid. Therefore, λ > 1 is an important condition for the normal operation of the device.
2.3.3. Speed of the Endpoint of the Soil-Mixing Tooth
Equation (3) expresses the position of the endpoint of soil-mixing tooth at any time. The motion trajectory changes with the speed of tractor Vm, the radius of turn Rm, and the rotational angular velocity ω. We take the derivative of Equation (3) with respect to time to obtain the partial velocities of the endpoint of the soil-mixing tooth in the x and y directions:
Then, the instantaneous velocity
V of the endpoint of the soil-mixing tooth is:
3. Materials and Methods
Discrete element modeling (DEM) was adopted to carry out the simulation experiments of the seedbed clearing and shaping to improve the stone removal rate of the 50 mm soil layer and reduce the operating resistance to decrease the power consumption of the tractor, as well as to avoid manual repeatability experiments and reduce the intensity of labor. Accordingly, scientific and reliable working parameters of the device can be obtained.
3.1. Simulation Model Creation and Parameter Setting
The interaction between the dispersed particles and the soil operation machine involves complex mechanical problems, making the study of soil-touching parts difficult. Furthermore, there is currently no precise mathematical model for predicting the interactions of different operating environments. At present, the design and optimization of the soil-touching device mostly adopts the method of virtual simulation, among which DEM is an advanced and mature numerical simulation method for the discontinuous medium problem. In recent years, DEM has been widely applied in agricultural engineering, which mainly focuses on agricultural materials science and the application and research of the interaction between the soil and soil-touching parts. Therefore, this study adopted the EDEM 2018 software to simulate the seedbed clearing and shaping process and conduct the simulation experiments. The purpose of the DEM simulation experiments is to establish the regression equations of stone removal rate (y1), stone removal efficiency (y2), operating resistance (y3), and torque (y4), to understand the operation law and mechanism of the device, and to obtain the optimal combination of operation parameters to achieve high efficiency and energy-saving operations.
Figure 5a shows the simplified simulation model of the seedbed clearing and shaping device imported into the software preprocessing module.
Multi-spherical polymerization was selected based on the characteristics of the stone shapes. A total of 35 sphere models were connected to construct the stone particle models (as shown in
Figure 5b). The distribution of soil particle size was statistically analyzed using a size-grading sieve. The soil particles were divided into four grades, and nearly 50% of the soil particles were in the range of 1–2.36 mm. Combined with the computer performance and the actual situation of the simulation, the soil particle model considered spheres with a diameter of 2 mm, and the diameter was generated by the normal random distribution method to accord with the realistic irregularity of actual soil. The cutting-ring method was used to measure the soil density, which was repeated five times, and the average soil density was 1914 kg·m
−3. Other soil parameters were determined based on the available parameters and relevant literature [
23,
24,
25]. The soil particle model was calibrated with the angle of repose as the response value, and the relative error between the actual and the model was 2.89%. The Hertz–Mindlin (no-slip) contact model included in the EDEM 2018 software was used for the simulation analysis, and with reference to the relevant literature [
26,
27,
28].
Table 1 summarizes the simulation experiment parameters, which were obtained through experimental measurement and references [
29,
30], and calibrated by EDEM. Based on the actual number of stones in the 50 mm soil layer, 240 stone particles were generated, the size of the soil tank was 4500 × 2400 × 150 mm (length × width × height), and the fixed time step was set to 20% of the Rayleigh time step (8.86 × 10
−7 s).
3.2. Scheme and Method of Simulation Experiment
According to the previous analysis and preliminary experimental results, the main operating parameters that affect the rice seedbed clearing and shaping, and the device working performance, namely, the forward speed V, soil depth H, and rotation speed n, were selected as the experimental factors. Furthermore, the stone removal rate (y1), stone removal efficiency (y2), operating resistance (y3), and torque (y4) were analyzed.
The simulation experiment using the box–bench design with three factors and three levels was conducted to evaluate the operating performance of the proposed device. Furthermore, preliminary combined factor experiments were conducted to determine the range of the experimental factors; the forward speed of the tractor is 0.4–0.8 m/s, soil depth is 40–80 mm, and the rotation speed is 70–130 r/min.
Table 2 summarizes the code value of the simulation experimental factors, and
Table 3 summarizes the 20 groups of simulation experiment schemes.
During the experiments, when the work of the device was stable, the post-processing module of the EDEM 2018 software was used to establish the upper and lower two-layer grids with soil depths between 0–50 mm and 50–100 mm, respectively, in the region of determination. The index y1 is the ratio between the number of stones removed to both sides of the device and the total amount of stones during the simulation process. The index y2 is the number of stones removed to both sides of the device among the unit length during the normal operation section. The index y3 and y4 can be obtained directly by using the post-processing module of the EDEM 2018 software.
3.3. Data Analysis
The mechanical properties of the proposed seedbed clearing device was evaluated through the simulation experiment and field tests. The data processing and analysis were performed using Microsoft Excel and Design Expert software.
4. Results and Discussion
4.1. Variance Analysis and Discussion
Table 3 summarizes the results of the simulation experiments. The simulation data were then used to establish the regression equations, and variance analysis was carried out to verify the validity of the regression equations and significance of the items of the regression equations. Simultaneously, the secondary optimization of the regression equation was carried out to eliminate insignificant items. The optimized regression equations are shown in Equations (6)–(9), which were subjected to ANOVA again, as shown in
Table 4,
Table 5,
Table 6 and
Table 7, respectively.
The variance analysis of the regression equations of the stone removal rate (y1), stone removal efficiency (y2), operating resistance (y3), and torque (y4) showed that the regression equations were significant without the lack of fit, thereby indicating that the regression equations were effective and can be used to predict the response value. The significance ordering of the forward speed V, soil depth H, and rotation speed n on the stone removal rate (y1), stone removal efficiency (y2), operating resistance (y3), and torque (y4) were soil depth H > forward speed V > rotation speed n, soil depth H > rotation speed n > forward speed V, soil depth H > forward speed V > rotation speed n, and soil depth H > forward speed V > rotation speed n, respectively.
4.2. Interactive Analysis and Discussion
The stone removal rate (y1), stone removal efficiency (y2), operating resistance (y3), and torque (y4) were not only affected by the forward speed V, soil depth H, rotation speed n, but also by the interactions between the factors, considering that partial interactions significantly affect the response value. Based on the analysis of variance of the regression equations, the response surfaces were analyzed and discussed.
4.2.1. Stone Removal Rate
The soil depth has a significant effect on the stone removal rate. Although the forward speed and rotation speed affect the stone removal rate, it is not significant. However, there were significant interaction effects among the three factors, and the quadratic term of the soil depth significantly affects the stone removal rate. As shown in
Figure 6a, the effect of soil depth on the stone removal rate is significantly stronger than the forward speed; when the soil depth is small, the stone removal rate changes slightly or decreases as the forward speed increases. When the soil depth is approximately 60 mm, the stone removal rate increases as the forward speed increases, and the increasing trend increases. The increasing soil depth increases the stone removal rate, whereas the increasing trend of the stone removal rate increases with the increasing forward speed. As shown in
Figure 6b, when the forward speed is small, the stone removal rate changes slightly as the rotation speed increases. When the forward speed is large, the stone removal rate gradually increases as the rotation speed increases; the effect of the forward speed on the change of the stone removal rate is almost the same as that of the rotation speed. As shown in
Figure 6c, when the soil depth is less than 70 mm, the stone removal rate increases rapidly as the rotation speed increases. When the soil depth is more than 70 mm, the stone removal rate changes slightly as the rotation speed increases, and exhibits a downward trend. When the rotation speed is small, the stone removal rate increases rapidly as the soil depth increases; however, when the rotation speed increases, the changes in the stone removal rate decrease as the soil depth increases. Finally, the tone removal rate reaches the maximum and does not change even if the soil depth increases.
4.2.2. Stone Removal Efficiency
The forward speed, soil depth, rotation speed, and the interaction between the soil depth and rotation speed have significant influence on the stone removal efficiency. As shown in
Figure 6d, with the increase in the soil depth, the stone removal efficiency gradually increases and finally does not change. With the increase in the rotation speed, the stone removal efficiency gradually decreases, and the amount of the reduction is small.
4.2.3. Operating Resistance
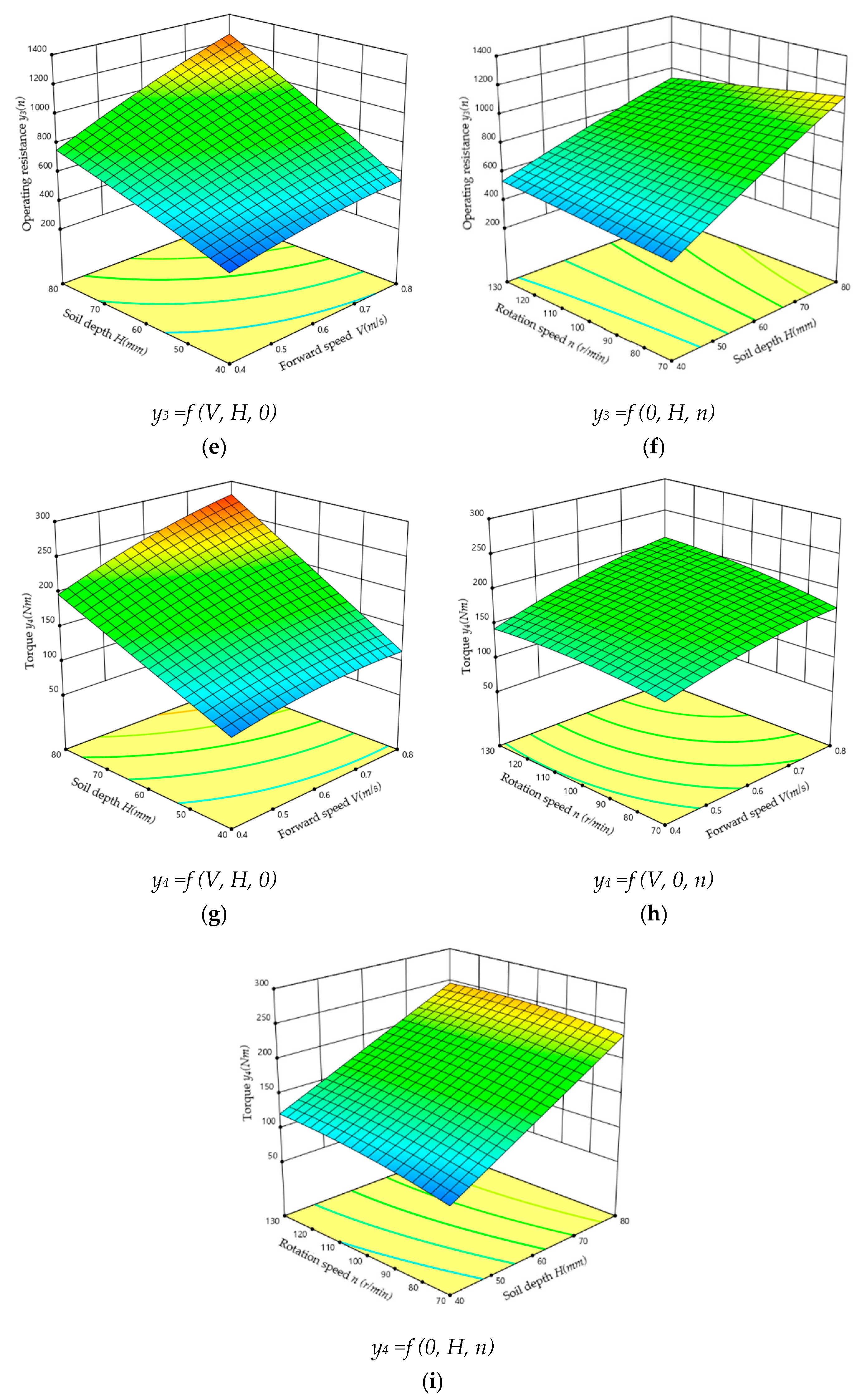
The forward speed, soil depth, and rotation speed, as well as the interactions between forward speed and soil depth, have significant influence on the operating resistance. As shown in
Figure 6e, the operating resistance increases as the forward speed increases; however, the operating resistance increases more strongly as the soil depth increases. As shown in
Figure 6f, the operating resistance increases as the soil depth increases. When the soil depth is less than 70 mm, the operating resistance gradually increases as the rotation speed increases; however, the increase is relatively gentle. When the soil depth is greater than 70 mm, the operating resistance gradually decreases as the rotation speed increases.
4.2.4. Torque
The forward speed, soil depth, and rotation speed, as well as the interactions among the three factors, have a significant influence on the torque. As shown in
Figure 6g, the torque increases as the forward speed and soil depth increase. As shown in
Figure 6h, the increase in the forward and rotation speeds leads to a gentle increase in torque, and the two factors basically have the same trend of influence on the torque. As shown in
Figure 6i, the rotation speed has little influence on the torque, and the torque gently increases as the rotation speed increases. When the rotation speed is approximately 100 r/min, the torque does not increase as the rotation speed increases. The soil depth has a great influence on the torque, and the torque increases rapidly as the soil depth increases.
4.3. Comprehensive Optimal Design
To rank the importance of the response values depending on the operation principle of “good, fast, and effortless”, and according to Equation (10), the optimal solution set was determined. To meet the requirements of the forward speed and operating speed ratio, the optimal solution is selected as forward speed V= 0.5 m/s, soil depth H = 61.28 mm, and rotation speed N = 110.85 r/min. The theoretical response values under the combination of parameters are stone removal rate y
1 = 88.37%, stone removal efficiency y
2 = 34.86 pieces/m, operating resistance y
3 = 692.66 N, and torque y
4 = 169.6 Nm. The expected value that the optimal solution satisfies the optimization condition is 0.746. The optimal operating parameters were rounded to forward speed V = 0.5 m/s, soil depth H = 61 mm, and rotation speed N = 110 r/min, and the optimal operating parameters were used to perform the simulation experiment to verify the validity and usability of the equations and results. The simulation experiment results were the stone removal rate y
1 = 85.65%, stone removal efficiency y
2 = 35.47 pieces/m, operating resistance y
3 = 719.23 N, and torque y
4 = 174.89 Nm, which were consistent with the theoretical results. Therefore, the equations and results were credible and could provide support for the field test.
Figure 7 and
Figure 8 show the simulation experiment effect of the optimal operating parameters and motion trajectory of the stones.
4.4. Comparisons with Field Measurements
4.4.1. Field Test Conditions and Method
Owing to the COVID-19 pandemic and the rainy weather, the field test using the proposed device was conducted at the research and teaching base of South China Agricultural University, located in Yuezhou Road, Tianhe District, Guangzhou City, Guangdong Province (23°10′13.8″ N, 113°22′28.2″ E) on 31 December 2020. The experimental area was approximately 2000 m
2, and the average soil moisture content and compaction were 20.81% (0–150 mm depth) and 198.5 kPa (0–100 mm depth), respectively. Two squares with the same area (800 × 800 mm) were arranged 2000 mm apart in the operation area, and the number of stones in the two squares was 10 (sparse square) and 30 (dense square), respectively, which were dyed red and green, respectively, to facilitate stone picking up and data statistics, as shown in
Figure 9a. The size of the stones in the two squares was randomly distributed in the range of 40–80 mm. The operating parameters of the device were set according to the optimal combination obtained from the simulation experiment. The field test was repeated six times, and the operating parameters of the device were calibrated before each operation to ensure the accuracy of the parameters, as shown in
Figure 9b. The device was connected to the tractor (LOVOL M804-B wheeled tractor, Weifang, China) using a trifilar suspension system. Owing to the limitations of the experimental conditions, only the stone removal rate was counted, and the groove-forming effect was observed.
4.4.2. Field Test Results
The field test results are shown in
Table 8. The coefficient of variation of the stone removal rate of six repeated field tests was found to be 8.98%; therefore, the operating performance of the device was stable. The average stone removal rate of six repeated field tests was 77.23%, and the difference compared with the simulation experiment results (85.65%) was less than 10%, which confirms the credibility of the simulation experiment results. In the six groups of field tests, the average stone removal rate of the two kinds of stone with different distribution densities were 82.78% and 71.67%, respectively. The stone removal rate in densely distributed areas were higher than those in less distributed areas. However, the difference between them was not significant, that is, the distribution density of the stones had no significant effect on the stone removal rate of the device.
Figure 10 shows the field test site. The observation method was used to evaluate the groove-forming effect, and the comprehensive analysis showed that the effect reached the design requirements.
Figure 11 shows the effect of groove forming and seedling growth.
5. Conclusions
In order to improve the quality of the seedbed, we proposed a seedbed clearing and shaping device for dry direct-seeded rice, which was developed using theoretical calculations, discrete element modelling simulations, and field tests. The device can be used to remove stones in the seeding area, break soil blocks, and form grooves without disturbing the deep soil. The research results showed that:
- (1)
The primary and secondary factors that affect the stone removal rate (y1), stone removal efficiency (y2), operating resistance (y3), and torque (y4) of the device were: soil depth H > forward speed V > rotation speed n and soil depth H > rotation speed n > forward speed V. Furthermore, the optimization parameters combination of the device was: forward speed V = 0.5 m/s, soil depth H = 61 mm, and rotation speed N = 110 r/min, which obtained a stone removal rate of y1 = 85.65%, stone removal efficiency of y2 = 35.47 pieces/m, operating resistance of y3 = 719.23 N, and torque of y4 = 174.89 Nm.
- (2)
The field verification tests results indicated that the stone removal rate y1 was 77.23% under the optimization parameters combination. The mean relative error of the simulated experiments value was 8.42%, thereby indicating that the accuracy and effectiveness of the simulation model and regression equation and the good effect of the groove formation and seedling growth were obtained.
The field test of the proposed device successfully performed the removal of stones in the seedbed and the formation of the seeding furrow, thereby providing a high-quality seedbed for sowing and rice growth. In the future, subsequent trials of the device in other regions will be carried out to explore the adaptability of the machine to different working conditions and potential problems to optimize and improve the device.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}