
Effect of Mounting Angle on Bending Subsoiling Tool–Soil Interactions Using DEM Simulations

Abstract
:1. Introduction
2. Materials and Methods
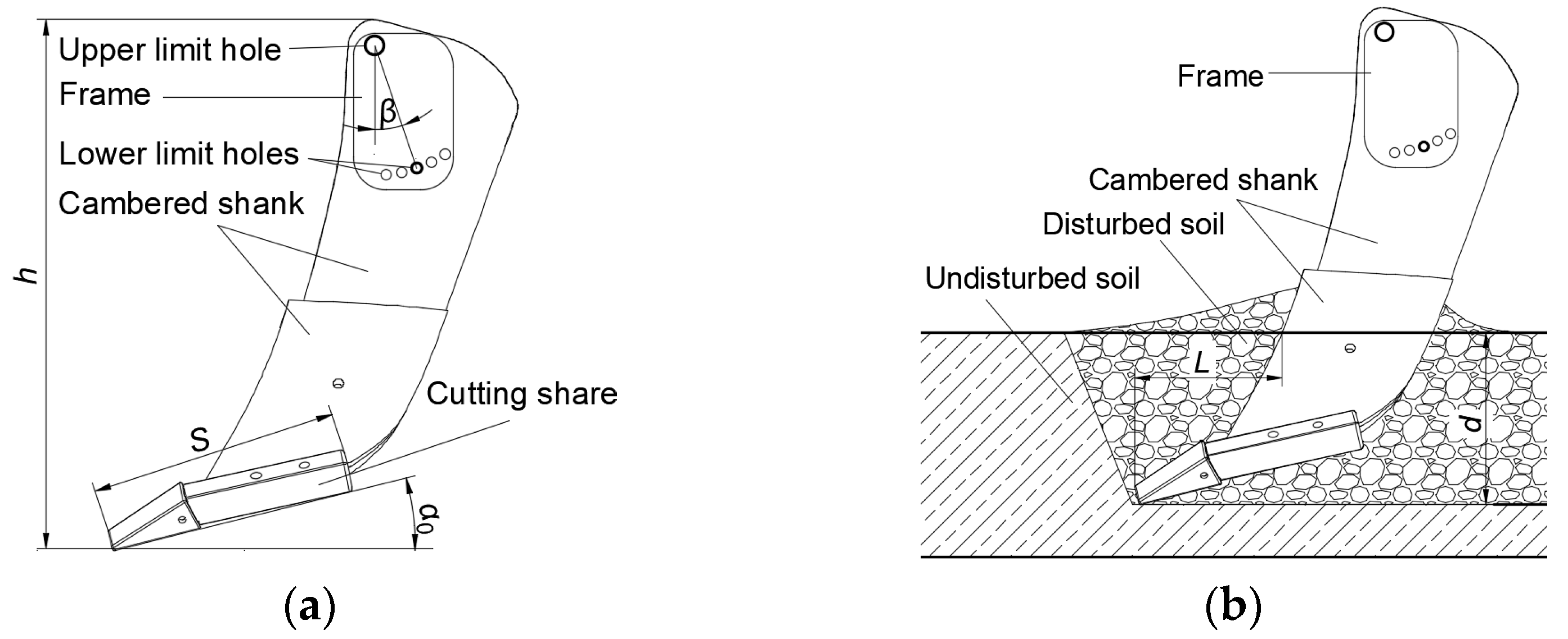
2.1. Description of the Subsoiling Tools
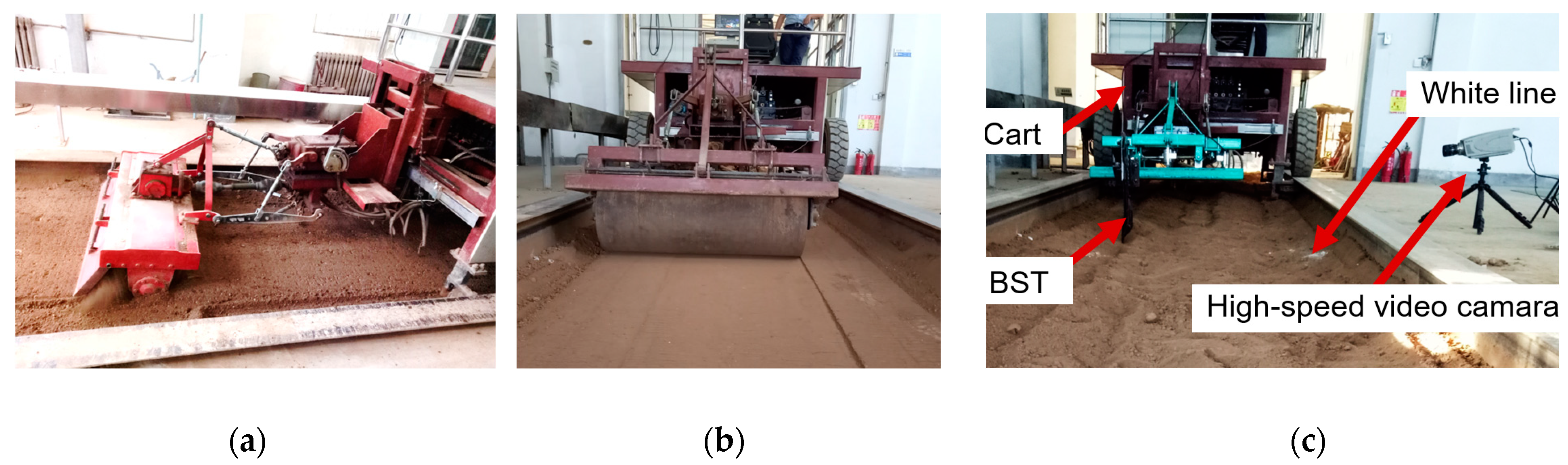
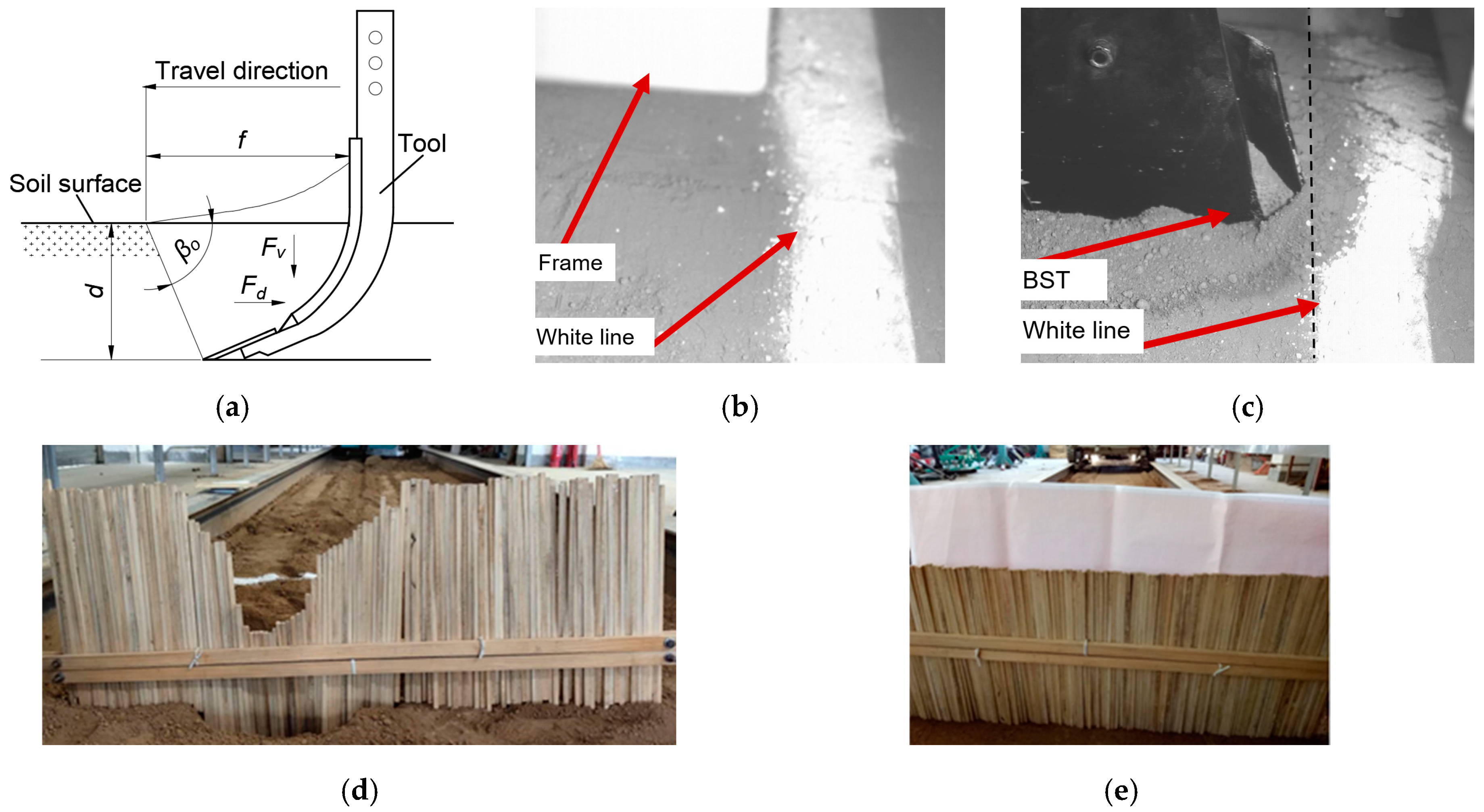
2.2. Laboratory Soil Bin Test
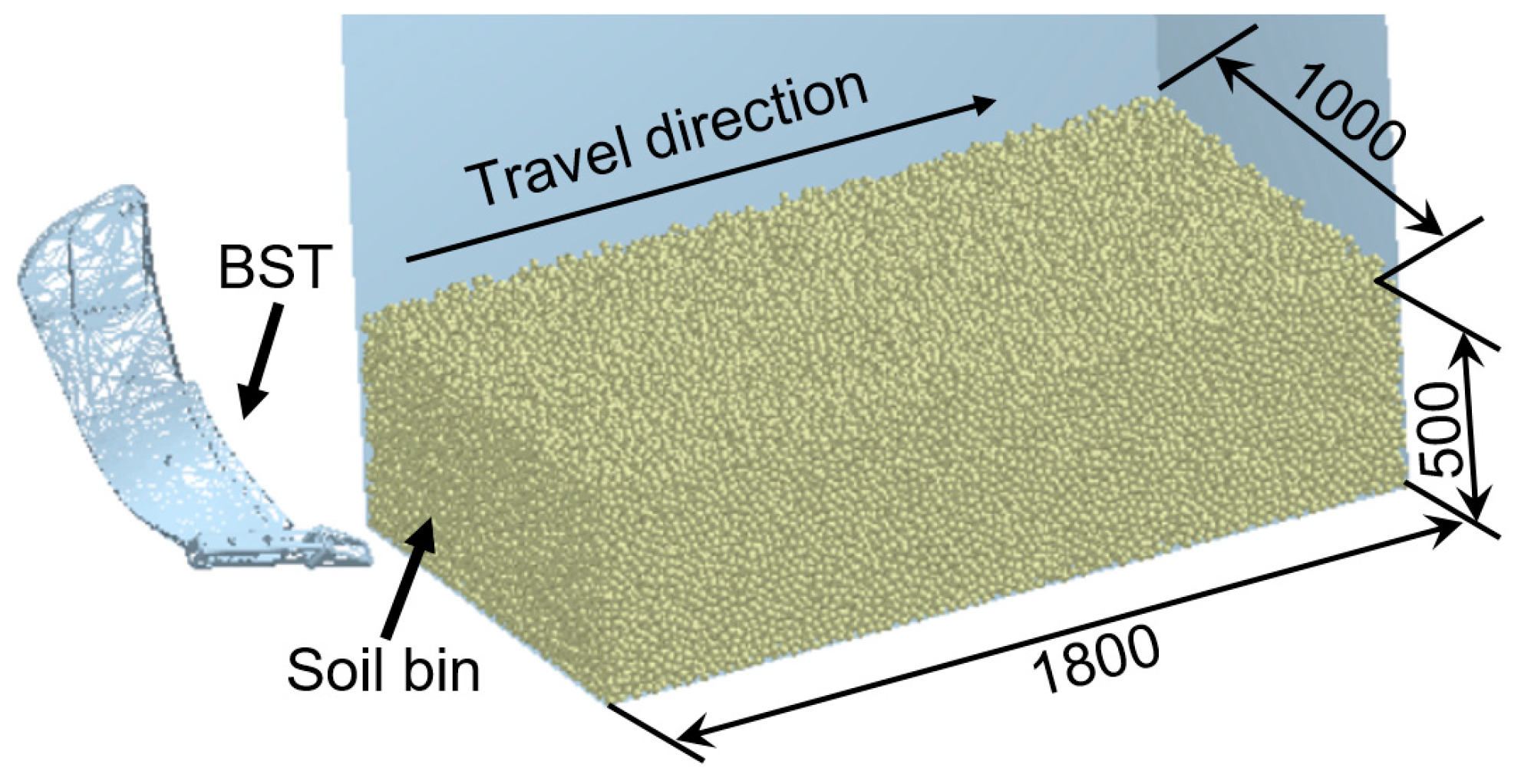
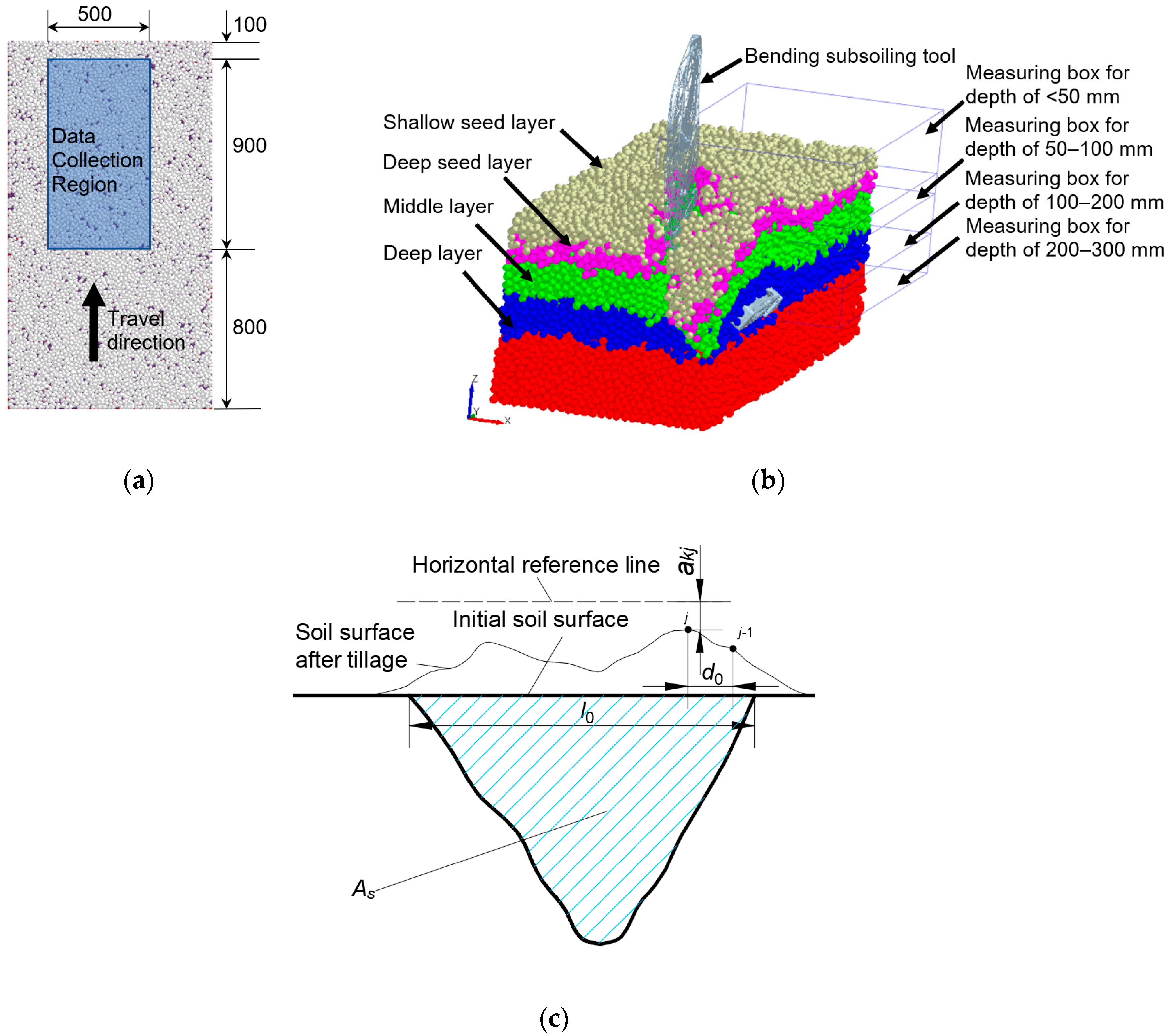
2.3. EDEM Simulations
3. Results and Discussion
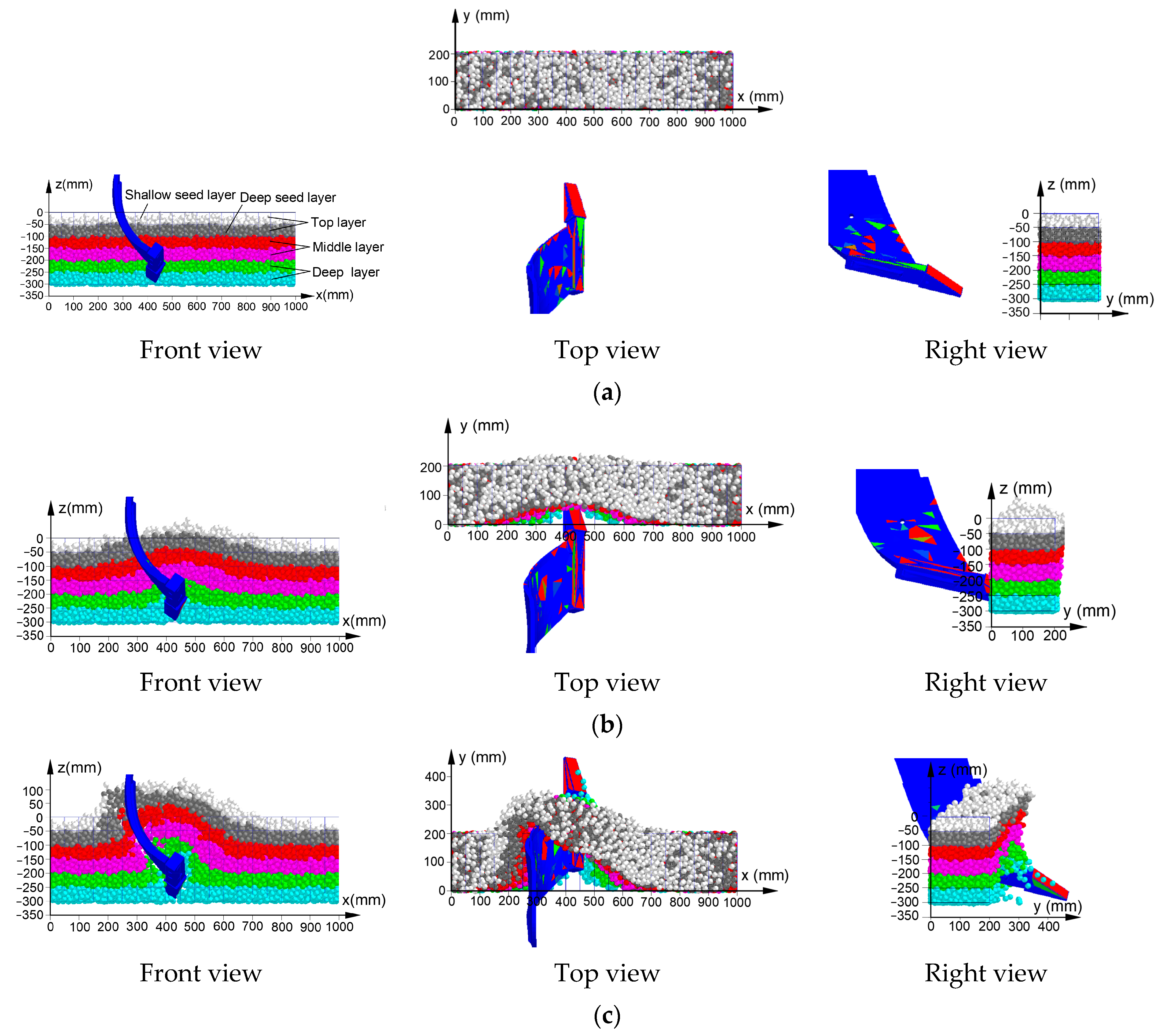
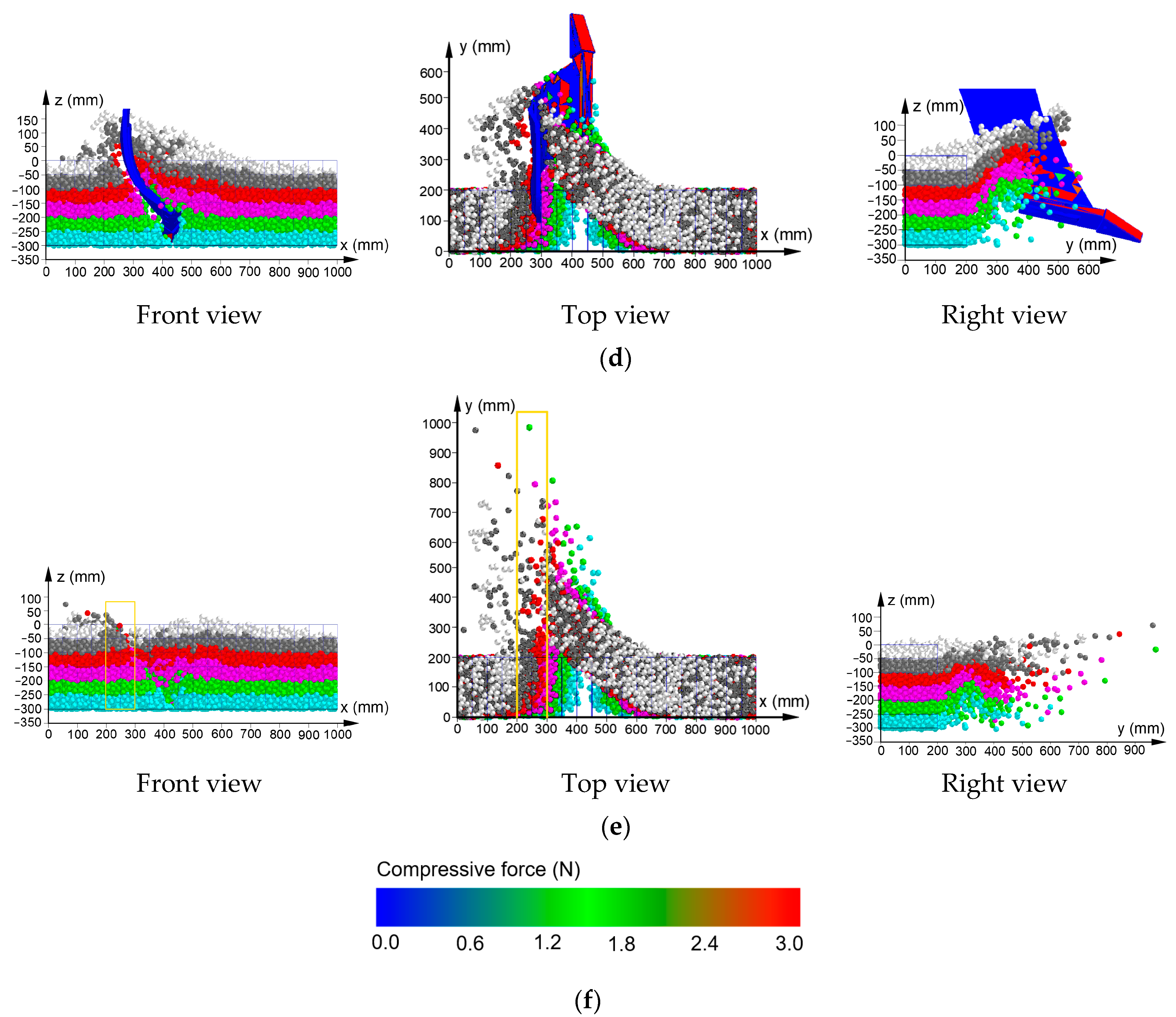
3.1. Soil–Bending Subsoiling Tool (BST) Interaction Analysis
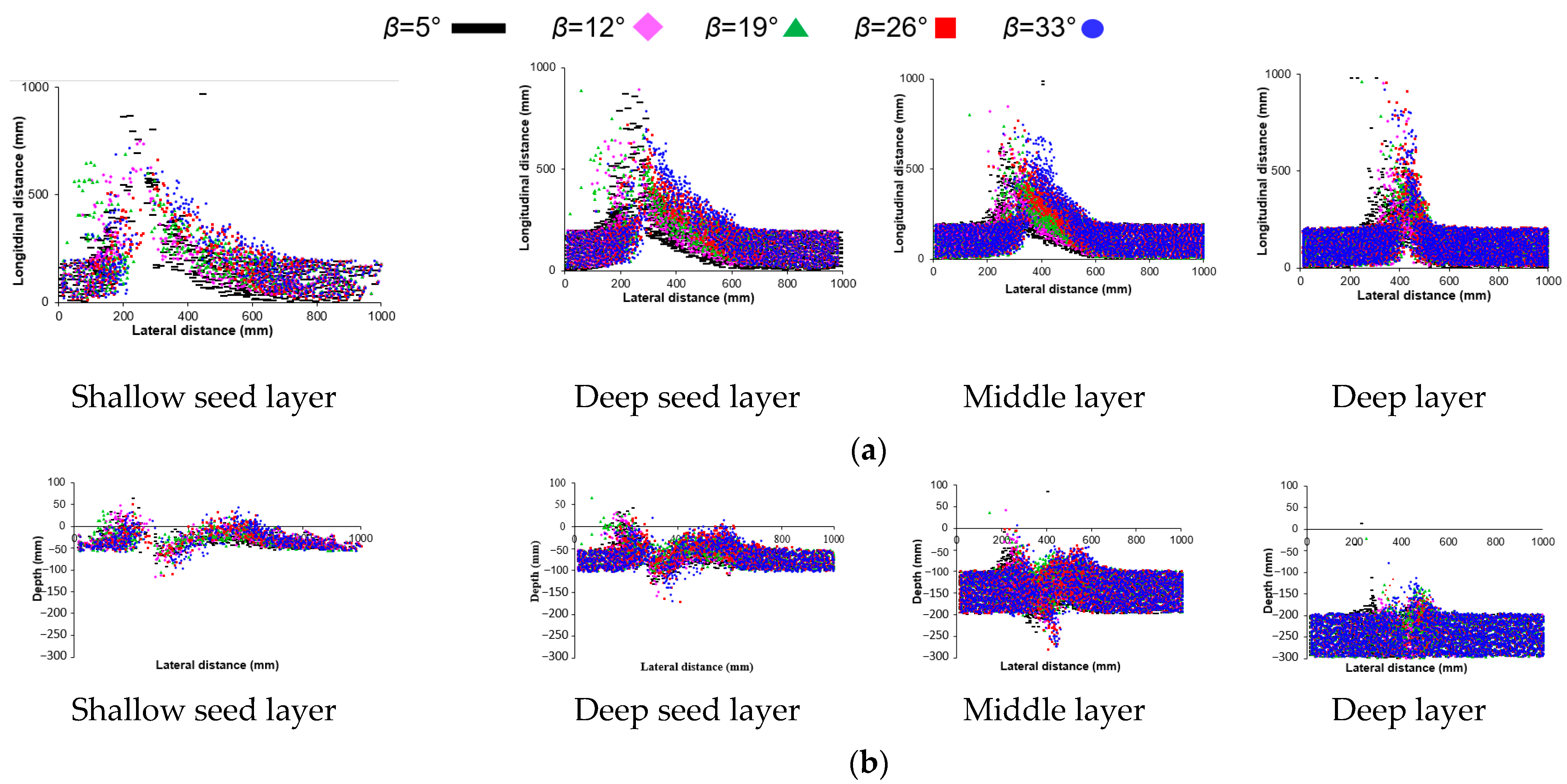
3.2. Effects of the Mounting Angle on Soil Particle Displacement
3.3. Effects of the Mounting Angle on Soil Layer Mixing
3.4. Effect of the Mounting Angle on Soil Disturbance Behaviors
3.4.1. Soil Surface Flatness
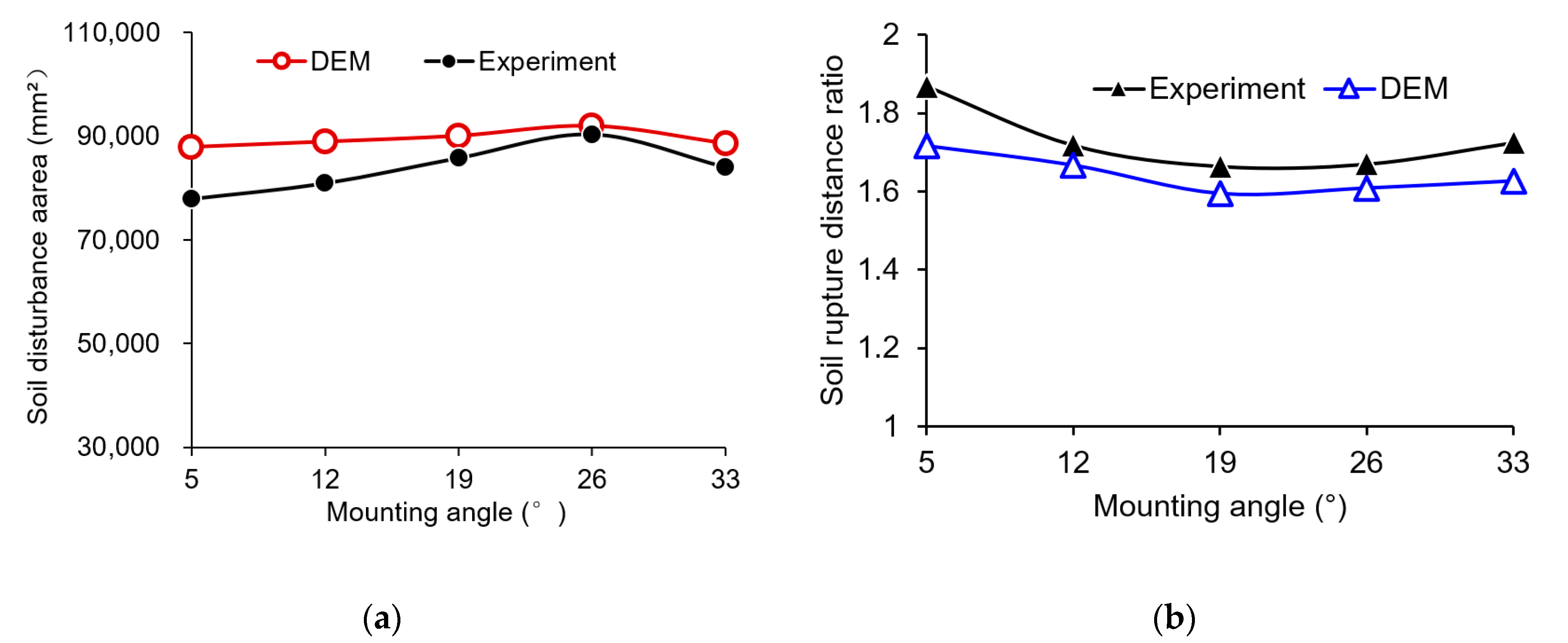
3.4.2. Soil Disturbance Area and Soil Rupture Distance Ratio
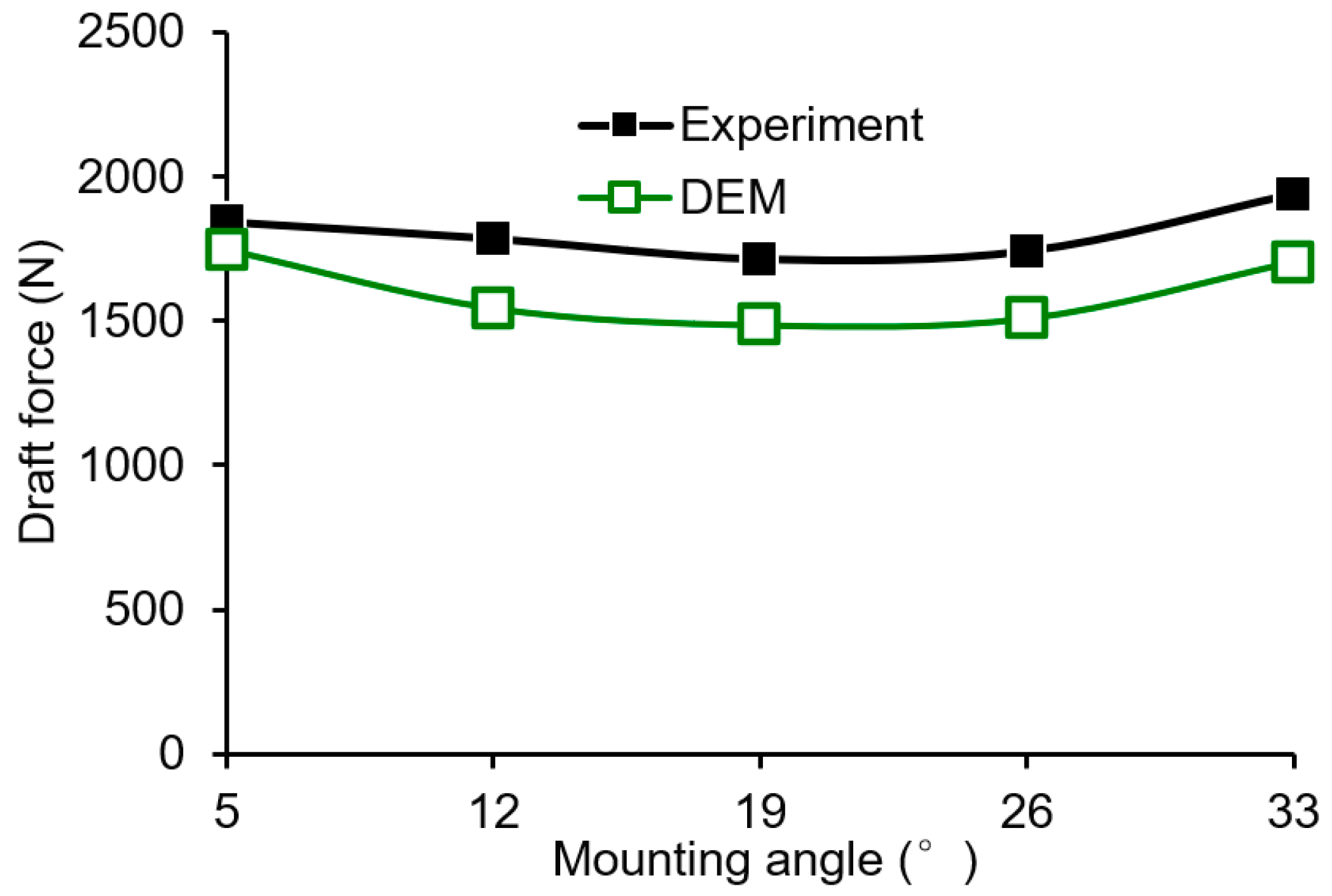
3.5. Effect of the Mounting Angle on Draft Force
4. Conclusions
- (1)
- The upheaval, failure and fragmentation of soil were achieved by successive shearing, uplifting, extrusion, tension and turning actions from the cutting share and cambered shank of the BST. The soil disturbance range in lateral, forward and upward directions decreased with increasing soil depths. The lateral displacement of the deep layer initially increased and then decreased, and the maximum lateral displacement was at a β of 26°.
- (2)
- A BST with mounting angle of 26° could lift more moist soil from the deep seed and middle layers (5.0–15.5%) into the shallow seed layer (depth of <50 mm) without seriously affecting the mixing of the deep layer with other layers. Additionally, the BST with mounting angle of 26° had the largest soil disturbance area, comparably lower soil rupture distance ratio, soil surface flatness and draft force and higher soil loosening efficiency. Considering the tool performance, a mounting angle of 26° is recommended for the BST.
- (3)
- The relative errors between the simulated and experimental soil rupture distance ratios and draft forces ranged from 2.97% to 8.15% and from 5.36% to 13.53%, respectively. Moreover, the average relative error between simulated and experimental soil disturbance areas at various mounting angles was 7.04%. The small relative errors indicate the established DEM model has a good accuracy and can be used to simulated soil–BST interaction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pulido-Moncada, M.; Katuwal, S.; Kristensen, J.B.; Munkholm, L.J. Effects of bio-subsoilers on subsoil pore-system functionality: Case study with intact soil columns. Geoderma 2021, 385, 114897. [Google Scholar] [CrossRef]
- Song, W.; Jiang, X.; Li, L.; Ren, L.; Tong, J. Increasing the width of disturbance of plough pan with bionic inspired subsoilers. Soil Tillage Res. 2022, 220, 105356. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Wang, H.; Ning, F.; Zhang, Y.; Dong, Z.; Wen, P.; Wang, R.; Wang, X.; Li, J. The effects of rotating conservation tillage with conventional tillage on soil properties and grain yields in winter wheat-spring maize rotations. Agric. For. Meteorol. 2018, 263, 107–117. [Google Scholar] [CrossRef]
- Zheng, K.; McHugh, A.D.; Li, H.; Wang, Q.; Lu, C.; Hu, H.; Liu, W.; Zhang, Z.; Liu, P.; He, J. Design and experiment of anti-vibrating and anti-wrapping rotary components for subsoiler cum rotary tiller. IJABE 2019, 12, 47–55. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Chen, Y.; Zhang, X.R. Modelling the interaction of a deep tillage tool with heterogeneous soil. Comput. Electron. Agric. 2017, 143, 130–138. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, R.; Wang, S.; Wang, H.; Xu, Z.; Jia, G.; Wang, X.; Li, J. Effects of different sub-soiling frequencies incorporated into no-tillage systems on soil properties and crop yield in dryland wheat-maize rotation system. Field Crop. Res. 2017, 209, 151–158. [Google Scholar] [CrossRef]
- Raper, R.L. Force requirements and soil disruption of straight and bentleg subsoilers for conservation tillage systems. Appl. Eng. Agric. 2005, 21, 787–794. [Google Scholar] [CrossRef] [Green Version]
- Spoor, G.; Tijink, F.G.J.; Weisskopf, P. Subsoil compaction: Risk, avoidance, identification and alleviation. Soil Tillage Res. 2003, 73, 175–182. [Google Scholar] [CrossRef]
- Wang, Y.; Li, N.; Ma, Y.; Tong, J.; Pfleging, W.; Sun, J. Field experiments evaluating a biomimetic shark-inspired (BioS) subsoiler for tillage resistance reduction. Soil Tillage Res. 2020, 196, 104432. [Google Scholar] [CrossRef]
- Chen, Y.; Munkholm, L.J.; Nyord, T. A discrete element model for soil–sweep interaction in three different soils. Soil Tillage Res. 2013, 126, 34–41. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Hang, C.G.; Gao, X.J.; Yuan, M.C.; Huang, Y.X.; Zhu, R.X. Discrete element simulations and experiments of soil disturbance as affected by the tine spacing of subsoiler. Biosyst. Eng. 2018, 163, 73–82. [Google Scholar] [CrossRef]
- Ding, Q.; Ren, J.; Adam, B.E.; Zhao, J.; Ge, S.; Li, Y. DEM analysis of subsoiling process in wet clayey paddy soil. Trans. CSAM 2017, 48, 38–48. [Google Scholar] [CrossRef]
- Huang, Y.X.; Hang, C.G.; Yuan, M.C.; Wang, B.T.; Zhu, R.X. Discrete element simulation and experiment on disturbance behavior of subsoiling. Trans. CSAM 2016, 47, 80–88. [Google Scholar] [CrossRef]
- Tanaka, H.; Oida, A.; Daikoku, M.; Lnooku, K.; Sumikawa, O.; Nagasaki, Y. DEM simulation of soil loosening process caused by a vibrating subsoiler. Agric. Eng. Interna. CIGR E-J. 2007, 9, 1–18. [Google Scholar]
- Guo, Z.J.; Zhou, Z.L.; Zhang, Y.; Li, Z.L. Optimization of bionic soil engaging tools. Sci. China 2009, 39, 720–728. [Google Scholar]
- He, M.; Gao, H.W.; Dong, P.Y.; Cui, D.J.; Zhao, W.G. Subsoiling experiment on double cropping and conservation tillage adopt area. Trans. CSAM 2018, 49, 58–63. [Google Scholar] [CrossRef]
- Zhang, L.Y.; Zheng, X.; He, X.C. Performance analysis of the bending subsoiling tool. Jiangsu Agric. Sci. 2014, 42, 354–356. [Google Scholar]
- Lv, Z.B. Design and Experimental Study of the Multifunction Subsoiler and Key Components. Master’s Thesis, Jilin University, Changchun, China, 2013. [Google Scholar]
- Hang, C.G.; Huang, Y.X.; Li, W.; Zhu, R.X. Influence factors and reduction strategies of subsoiling tillage resistance. J. Northwest A F Univ. 2016, 44, 202–208. [Google Scholar] [CrossRef]
- Li, W. Influence Research of Subsoiling in Tandem on Soil Disturbance. Master’s Thesis, Northwest A&F University, Xianyang, China, 2017. [Google Scholar]
- Gürsoy, S.; Chen, Y.; Li, B. Measurement and modelling of soil displacement from sweeps with different cutting widths. Biosyst. Eng. 2017, 161, 1–13. [Google Scholar] [CrossRef]
- Sadek, M.; Chen, Y. Feasibility of Using PFC3D to Simulate Soil Flow Resulting from a Simple Soil-Engaging Tool. Trans. ASABE 2015, 58, 987–996. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C.; Fielke, J.M. Discrete element modelling of top soil burial using a full scale mouldboard plough under field conditions. Biosyst. Eng. 2017, 160, 140–153. [Google Scholar] [CrossRef]
- Wang, X.Z.; Li, P.; He, J.P.; Wei, W.Q.; Huang, Y.X. Discrete element simulations and experiments of soil-winged subsoiler interaction. IJABE 2021, 14, 50–62. [Google Scholar] [CrossRef]
- Zheng, K.; He, J.; Li, H.W.; Dao, P.; Wang, Q.J.; Zhao, H.B. Research on polyline soil-breaking blade subsoiler based on subsoiling soil model using discrete element method. Trans. CSAM 2016, 47, 62–72. [Google Scholar] [CrossRef]
- Wang, X.Z.; Yue, B.; Gao, X.J.; Zheng, Z.Q.; Zhu, R.X.; Huang, Y.X. Discrete element simulations and experiments of disturbance behavior as affected by the mounting height of the subsoiler’s wing. Trans. CSAM 2018, 49, 129–141. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Density of steel | kg m−3 | 7.8 × 103 |
| Shear modulus of steel | Pa | 7.3 × 1010 |
| Shear modulus of soil | Pa | 5 × 107 |
| Poisson’s ratio of steel | Dimensionless | 0.35 |
| Poisson’s ratio of soil | Dimensionless | 0.3 |
| Yield strength of soil | Pa | 1 × 106 |
| Static friction coefficient of soil–steel | Dimensionless | 0.52 |
| Static friction coefficient of soil–soil | Dimensionless | 0.70 |
| Rolling friction coefficient of soil–steel | Dimensionless | 0.05 |
| Rolling friction coefficient of soil–soil | Dimensionless | 0.225 |
| Restitution coefficient of soil–soil | Dimensionless | 0.60 |
| Damping coefficient | Dimensionless | 0.05 |
| Stiffness coefficient | Dimensionless | 0.95 |
| Cohesive energy density | J m−3 | 3 × 104 |
| Mounting Angle (°) | Soil Surface Flatness (mm) | ||
|---|---|---|---|
| DEM | Experiment | Deviation | |
| 5 | 19.03 | 16.48 | 2.55 |
| 12 | 20.18 | 16.87 | 3.31 |
| 19 | 22.40 | 17.13 | 5.27 |
| 26 | 22.35 | 17.52 | 4.83 |
| 33 | 27.46 | 23.40 | 4.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhou, H.; Ji, J. Effect of Mounting Angle on Bending Subsoiling Tool–Soil Interactions Using DEM Simulations. Agriculture 2022, 12, 1830. https://doi.org/10.3390/agriculture12111830
Wang X, Zhou H, Ji J. Effect of Mounting Angle on Bending Subsoiling Tool–Soil Interactions Using DEM Simulations. Agriculture. 2022; 12(11):1830. https://doi.org/10.3390/agriculture12111830
Chicago/Turabian StyleWang, Xuezhen, Hao Zhou, and Jiangtao Ji. 2022. "Effect of Mounting Angle on Bending Subsoiling Tool–Soil Interactions Using DEM Simulations" Agriculture 12, no. 11: 1830. https://doi.org/10.3390/agriculture12111830
APA StyleWang, X., Zhou, H., & Ji, J. (2022). Effect of Mounting Angle on Bending Subsoiling Tool–Soil Interactions Using DEM Simulations. Agriculture, 12(11), 1830. https://doi.org/10.3390/agriculture12111830