
Measurement and Calibration of the Discrete Element Parameters of Coated Delinted Cotton Seeds

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Determination of Contact Parameters
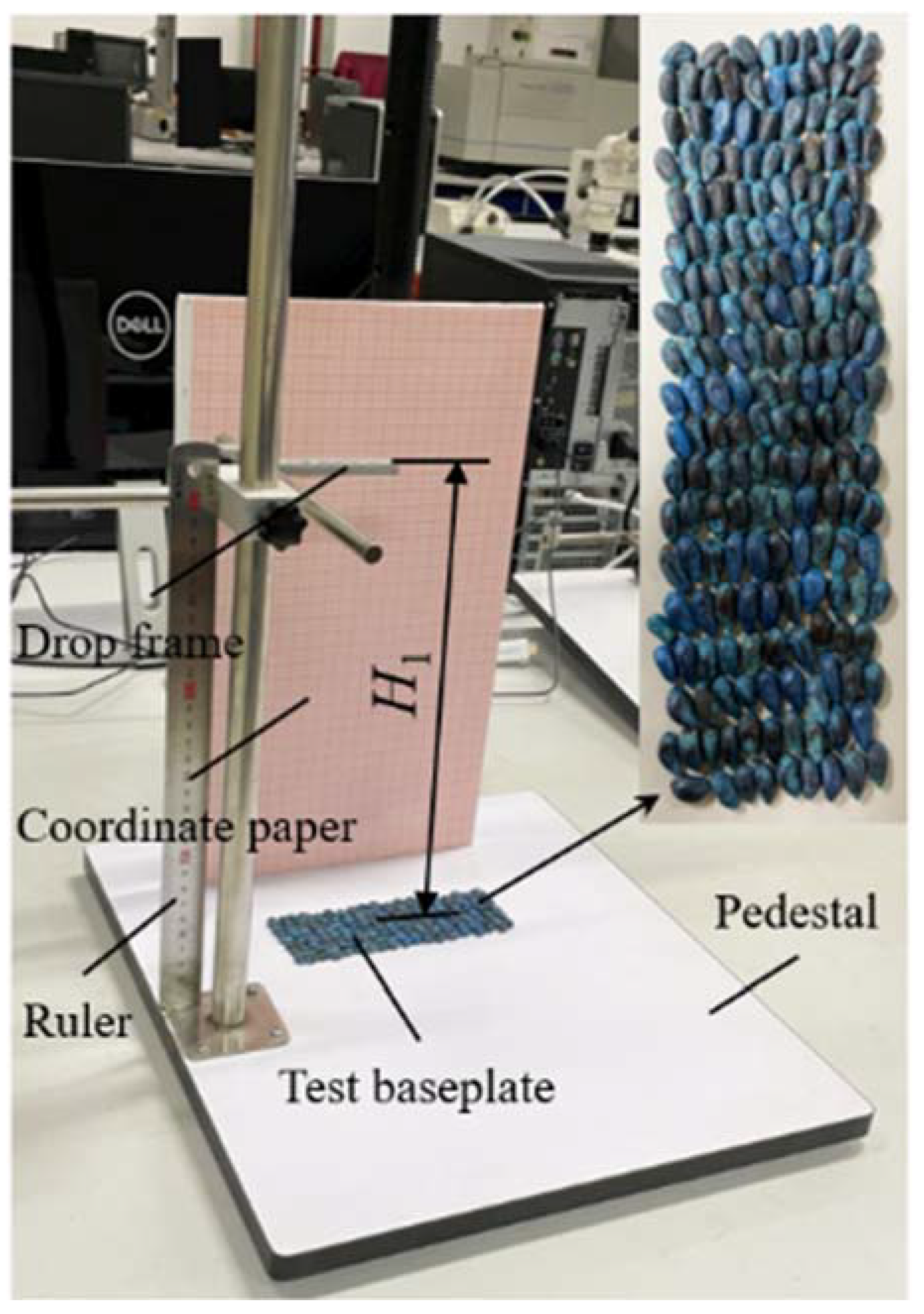
2.2.1. Impact Recovery Coefficient
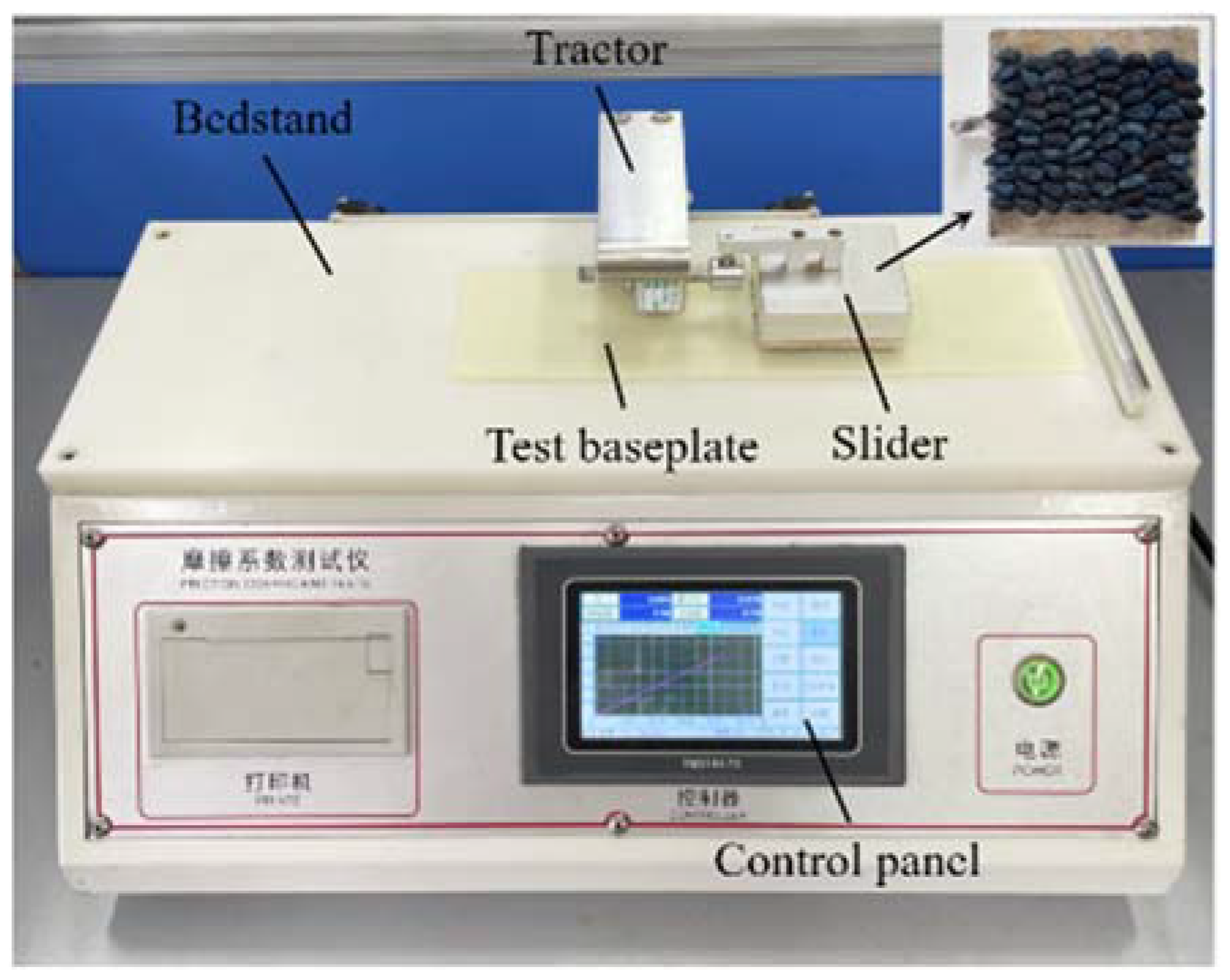
2.2.2. Static Friction Coefficient
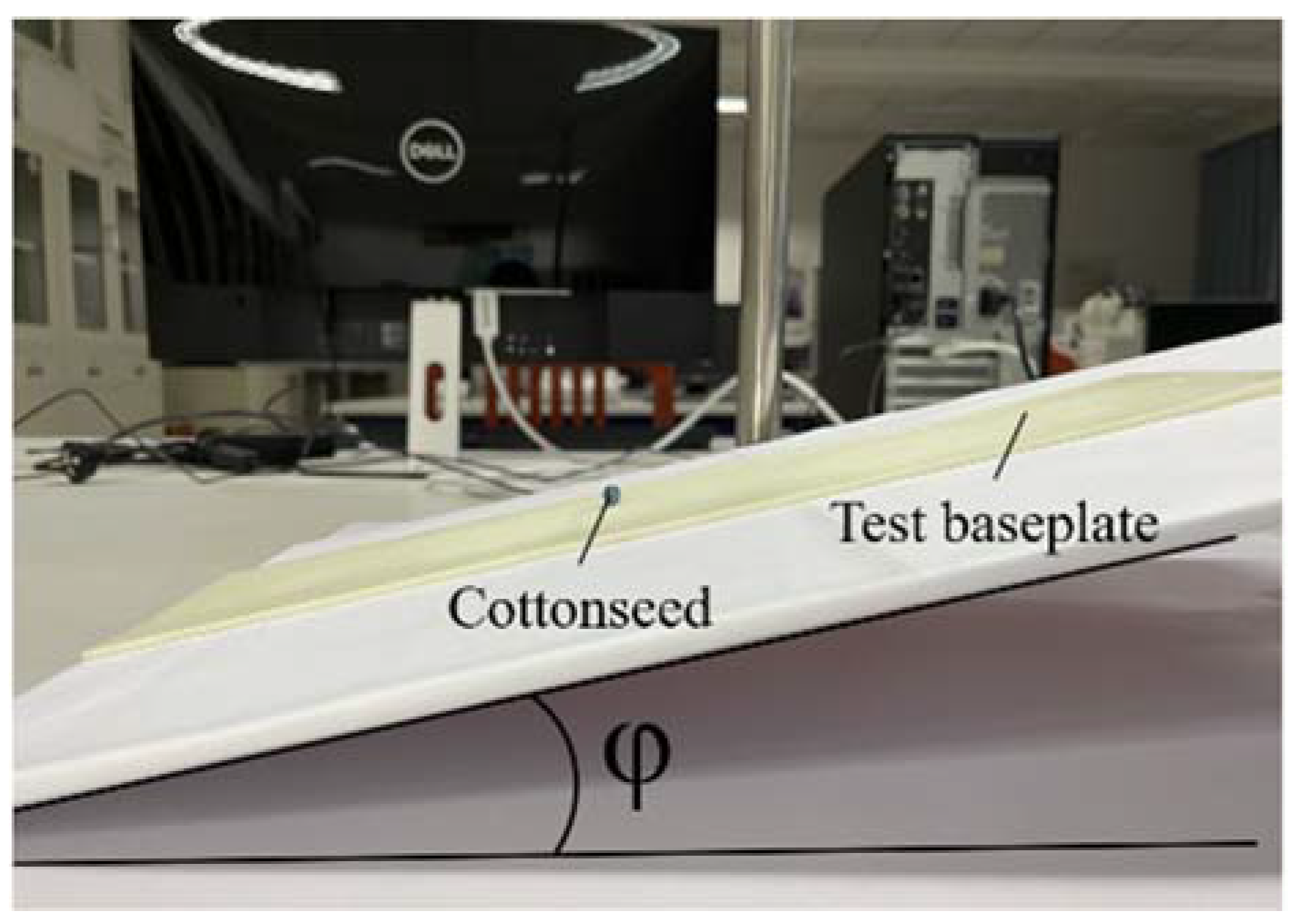
2.2.3. Rolling Friction Coefficient
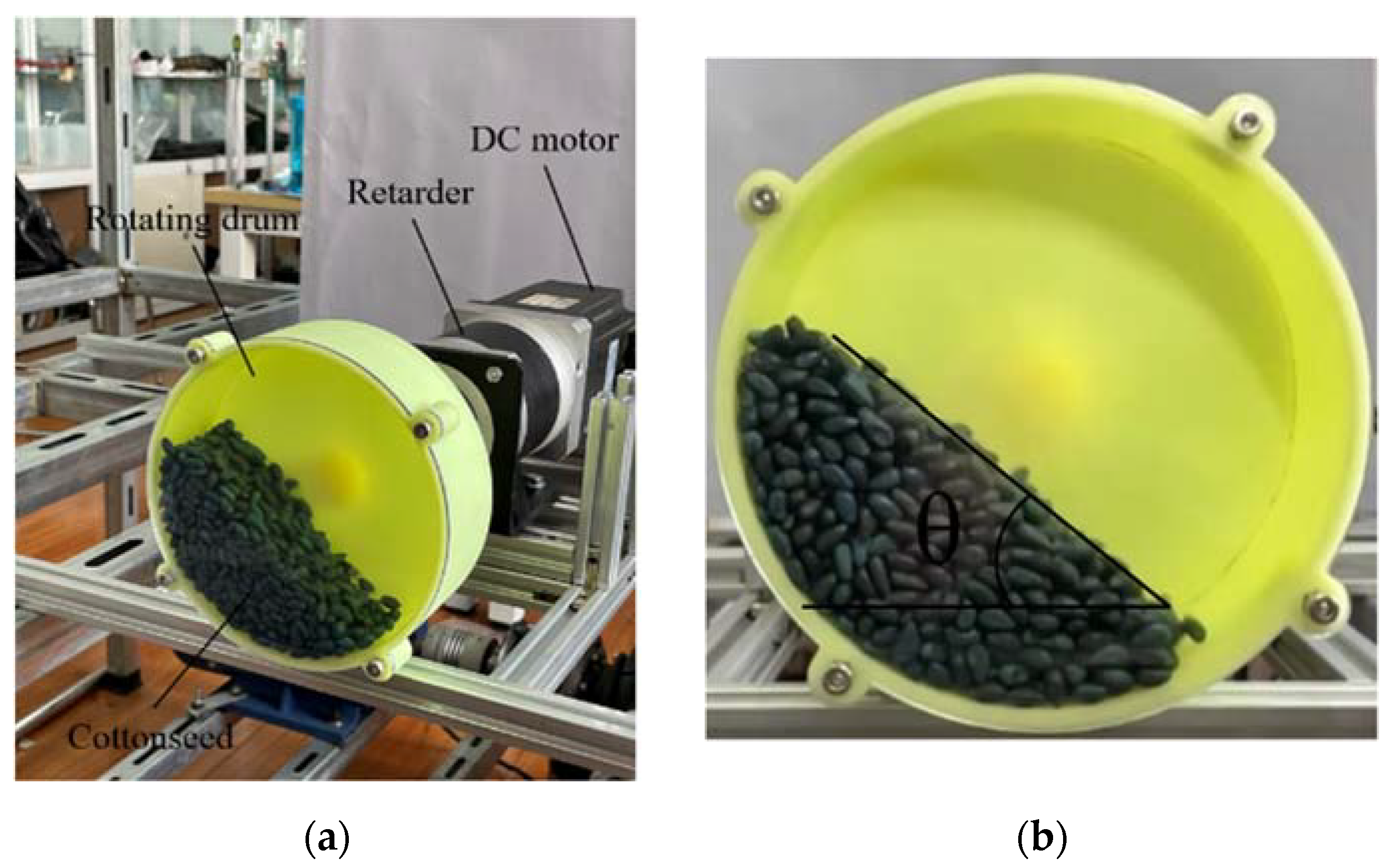
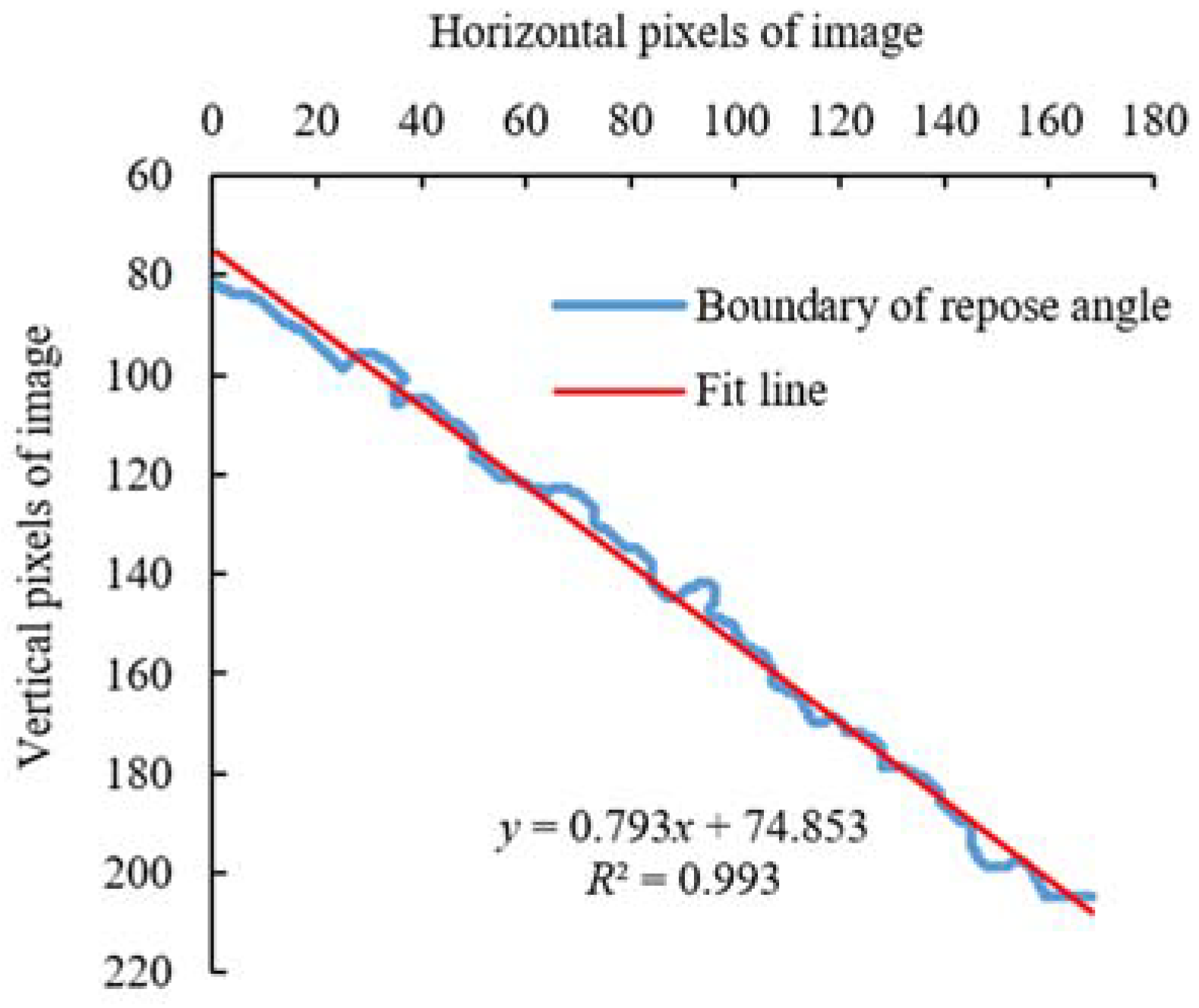
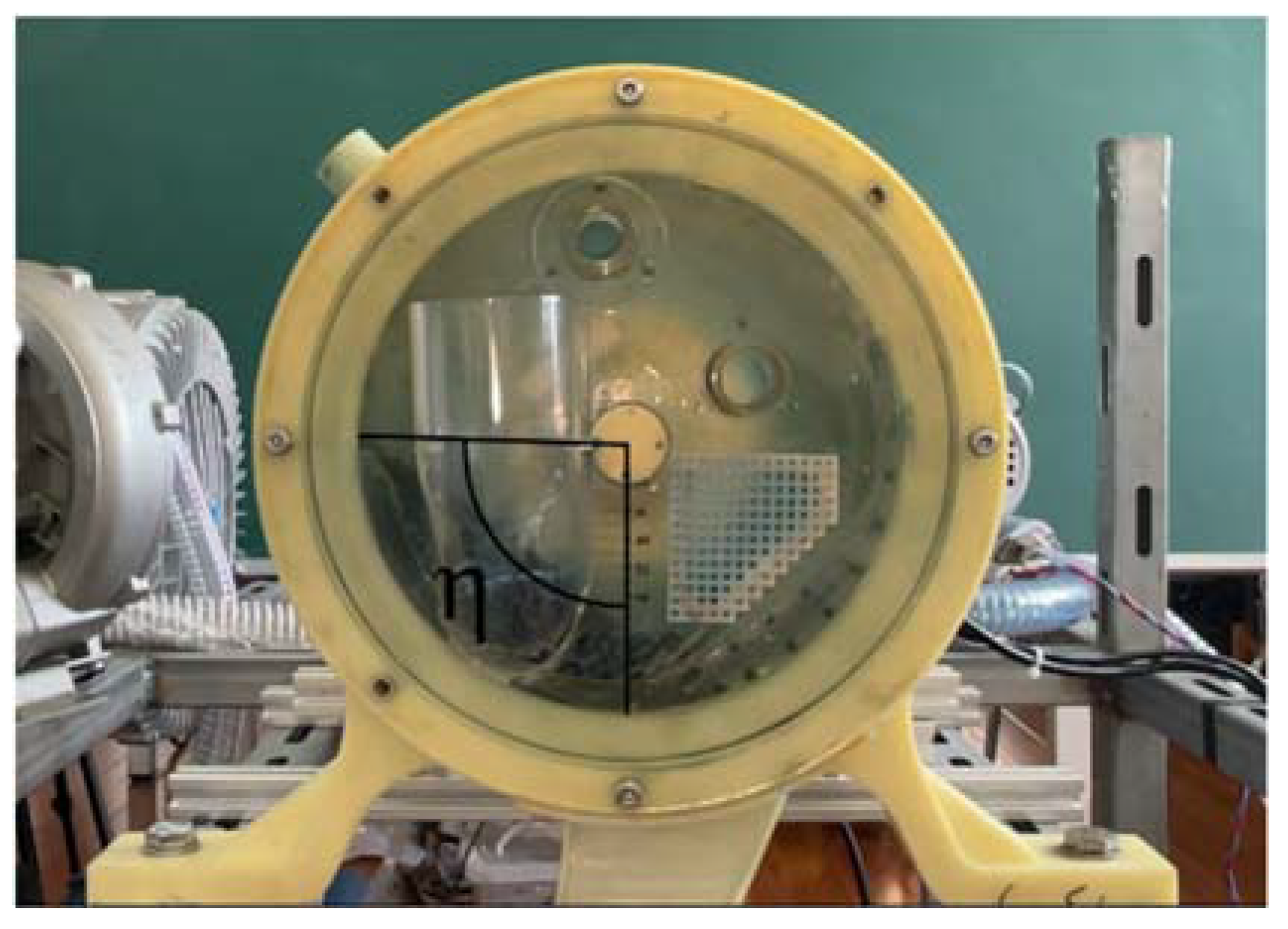
2.3. Determination of Dynamic Repose Angle of Coated Delinted Cotton Seeds
2.4. Selection of Contact Model, Modeling of Cotton Seed and Pretest of Discrete Element Simulation
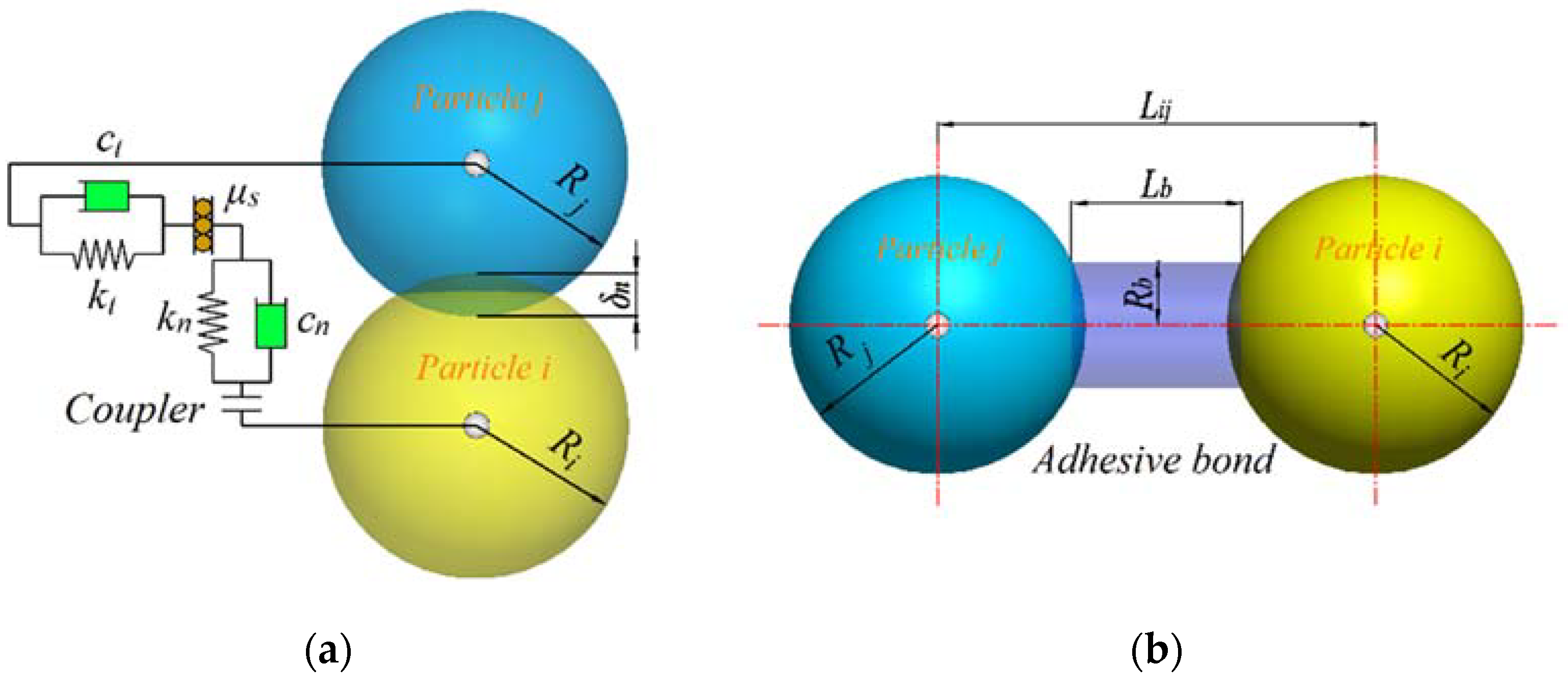
2.4.1. Selection of Contact Model
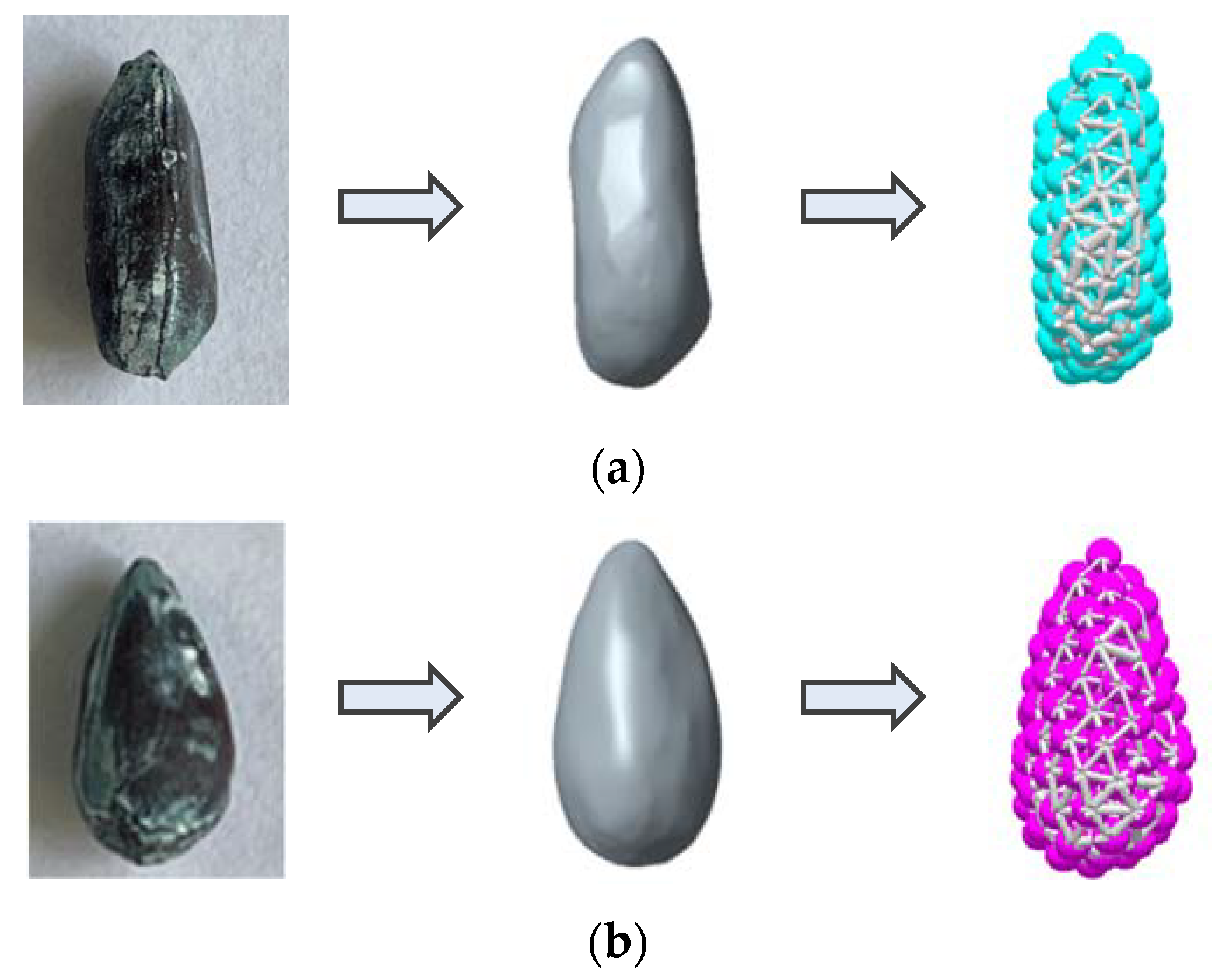
2.4.2. Modeling of Coated Delinted Cotton Seed
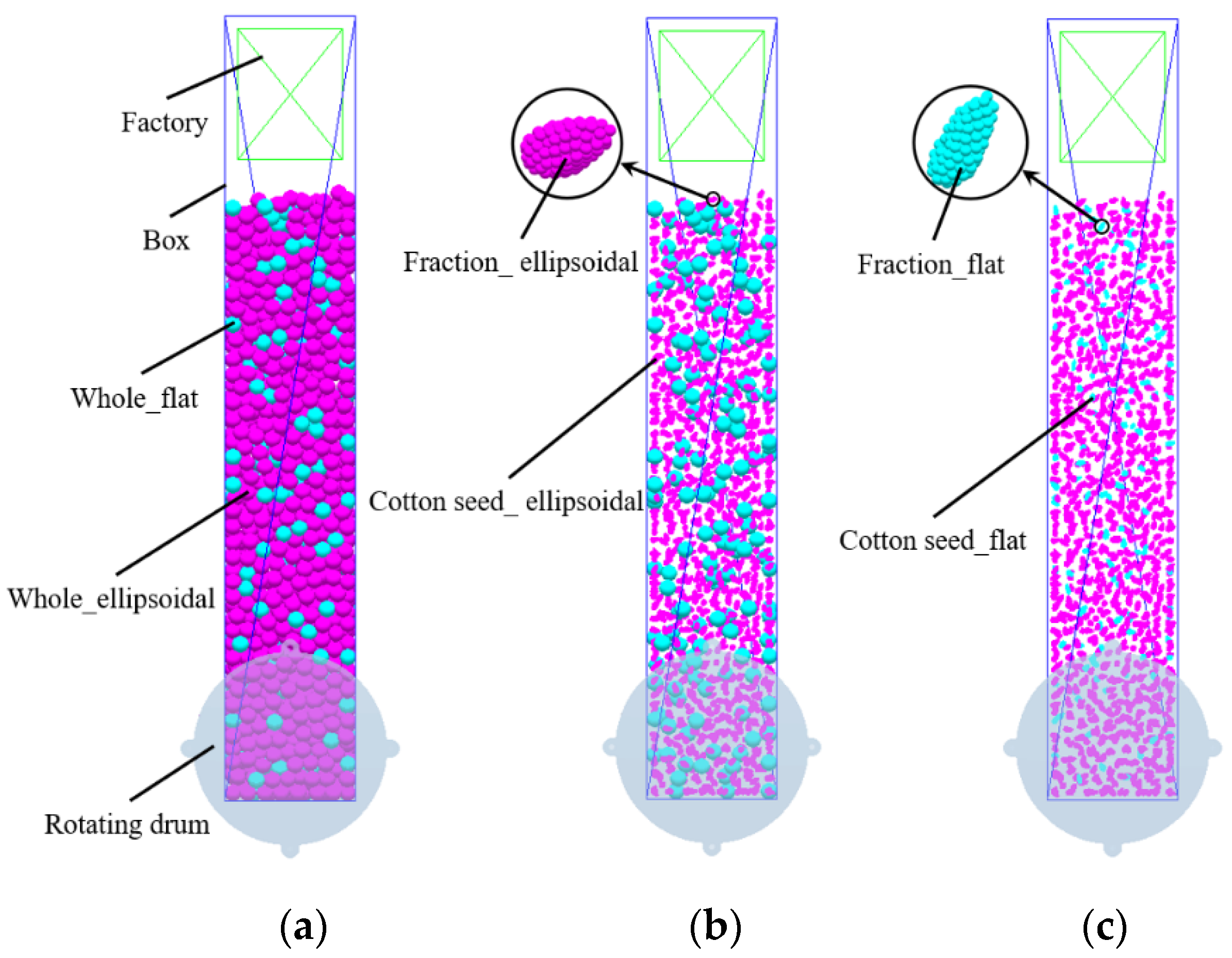
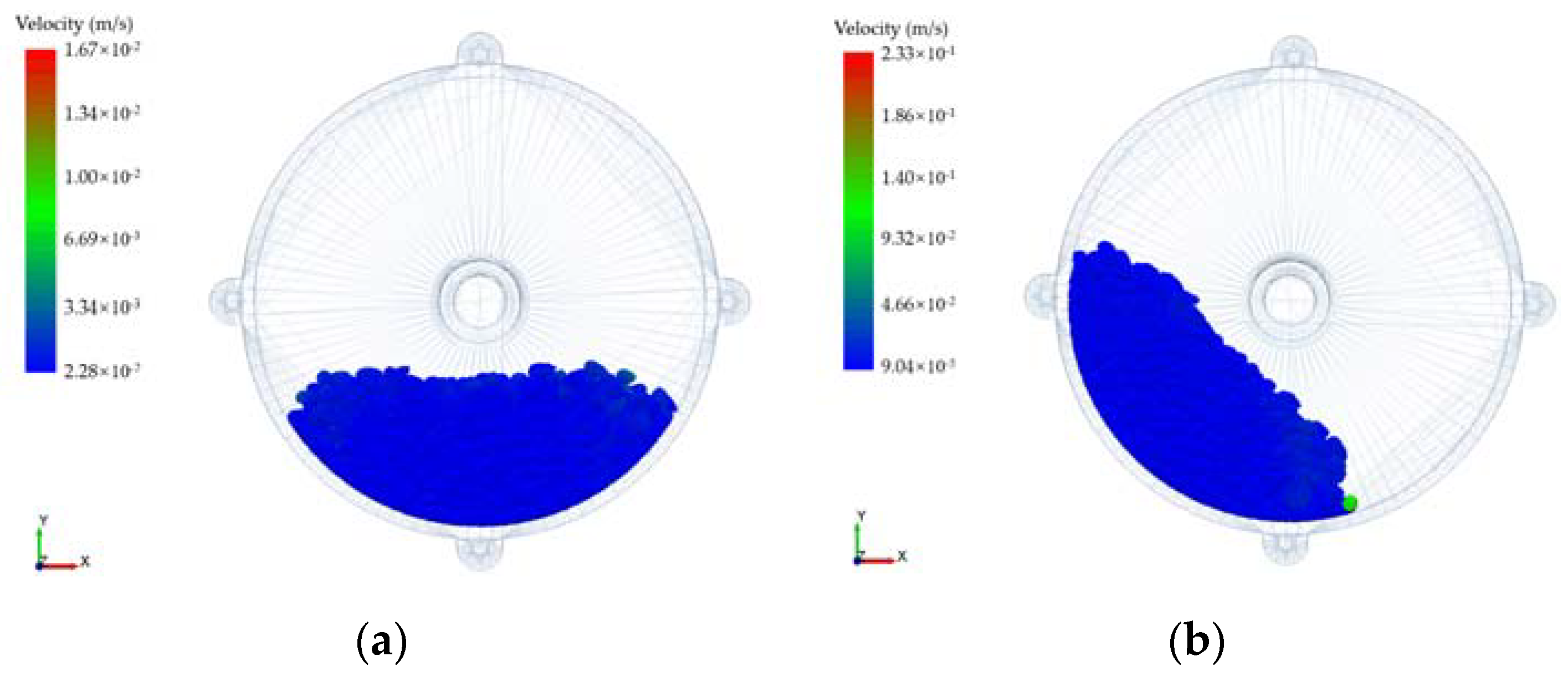
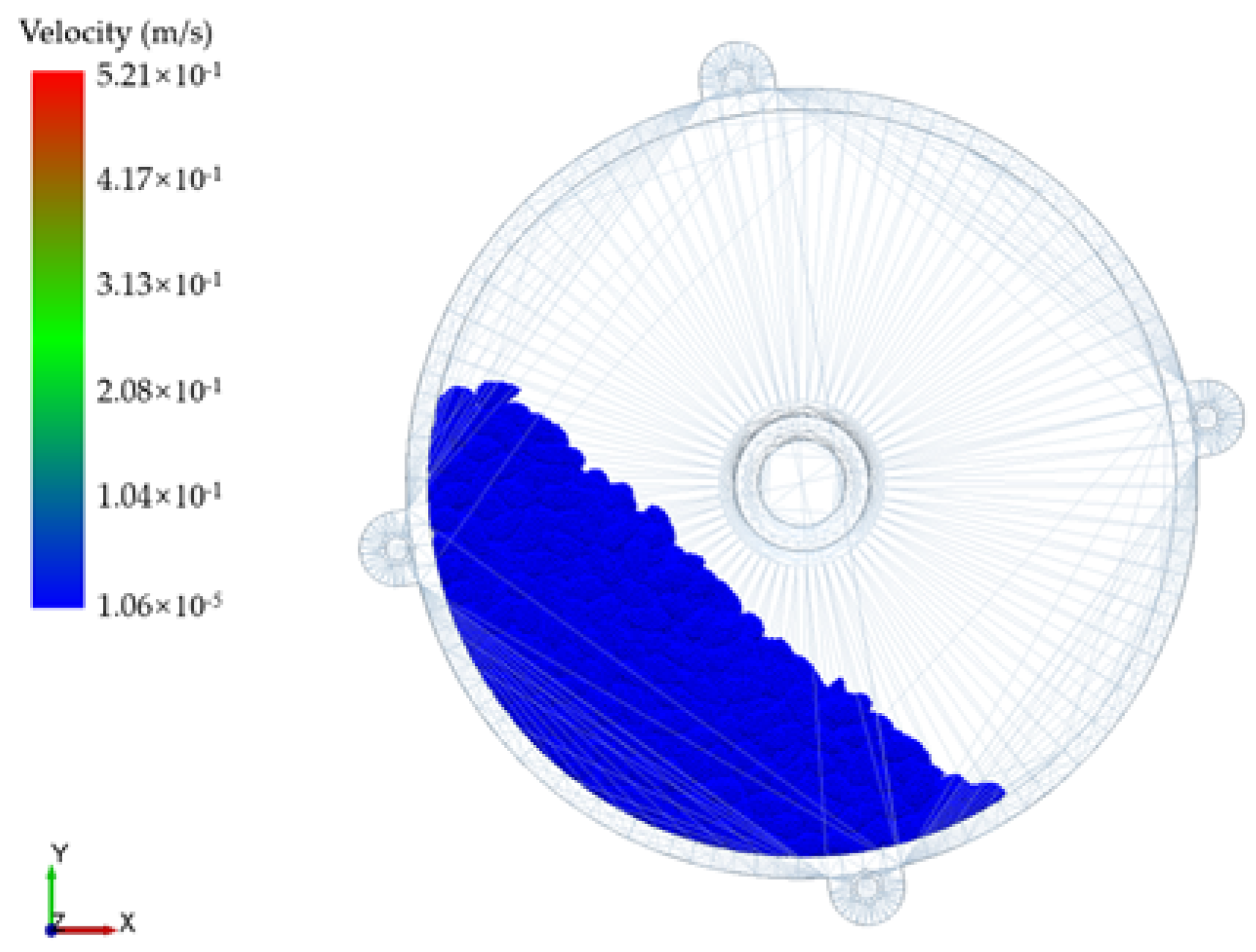
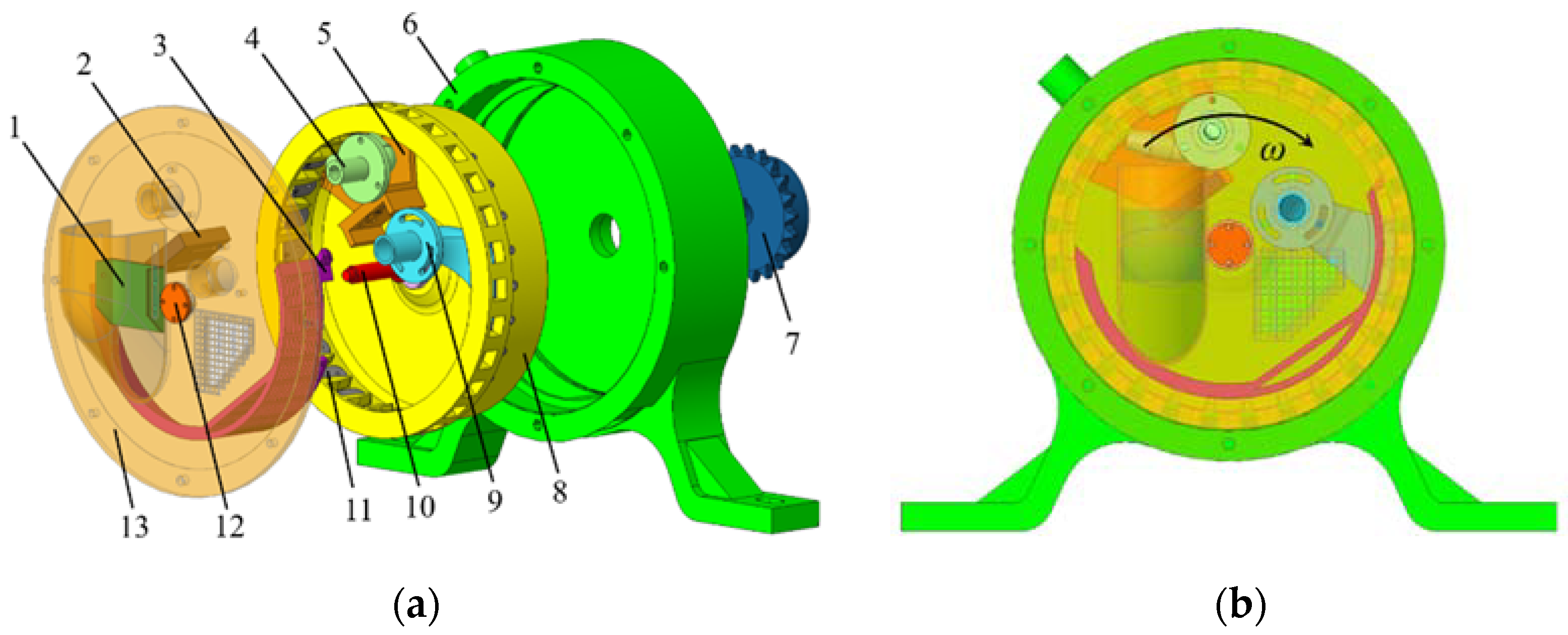
2.4.3. Pretests of Discrete Element Simulation of the Rotating Drum
2.5. Calibration of Cotton Seeds Contact Parameters
2.5.1. Plackett–Burman Test
2.5.2. Box–Behnken Test
2.5.3. Validation Tests
Validation Test of Rotating Drum
Validation Test of Seed-Metering Device
2.5.4. Single-Factor Test for Rolling Friction Coefficient
3. Results and Discussion
3.1. Plackett–Burman Test
3.2. Box–Behnken Test
3.2.1. Significance Analysis and Regression Model
3.2.2. Parameter Optimization
3.3. Validation Tests
3.3.1. Validation Test of Rotating Drum
3.3.2. Validation Tests of Seed-Metering Device
3.4. Single-Factor Test for Rolling Friction Coefficient
4. Conclusions
- (1)
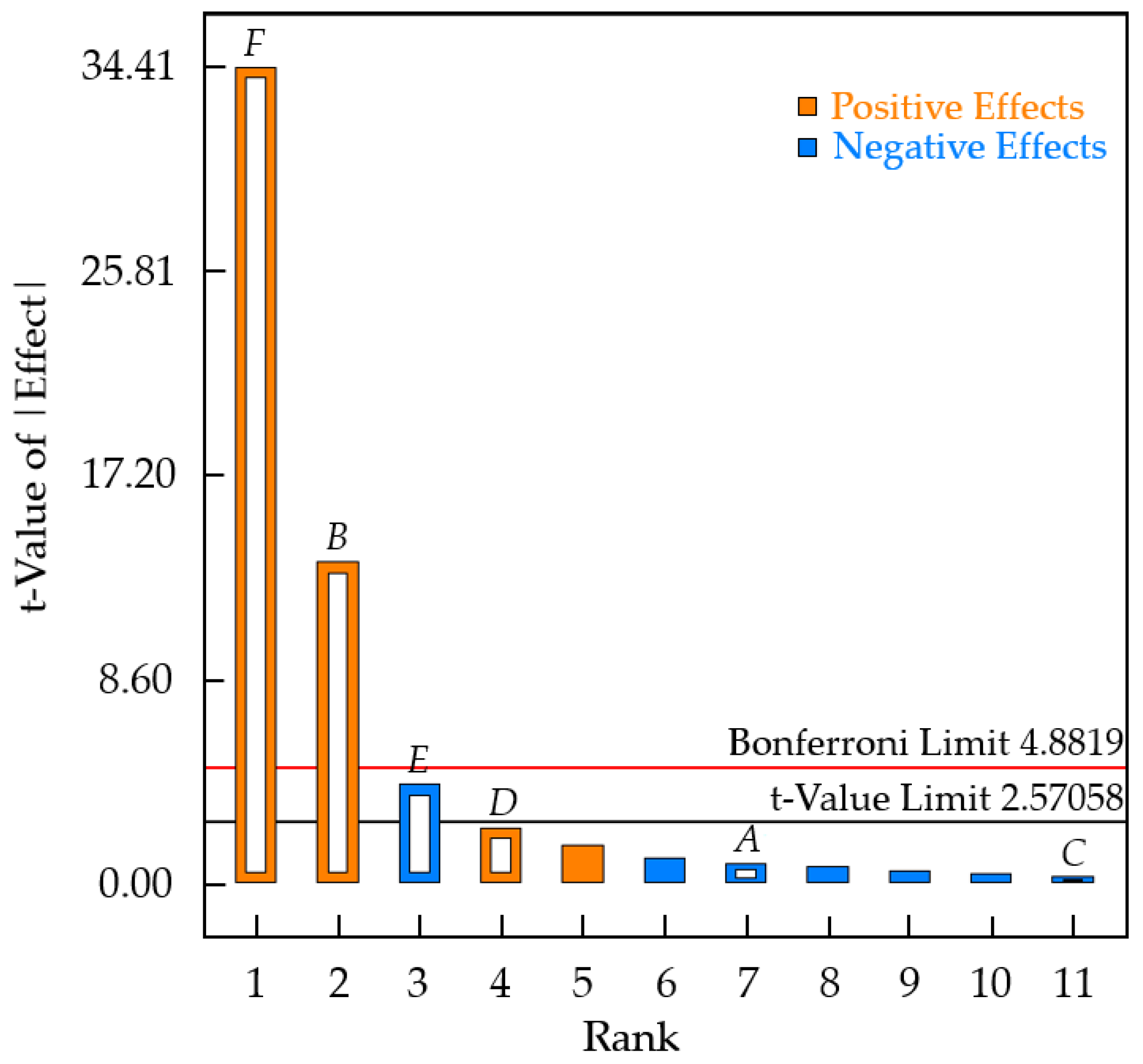
- The results of the Plackett–Burman test showed that the static friction coefficient of cotton seed–tough photosensitive resin, the impact recovery coefficient of cotton seed–cotton seed, and the static friction coefficient of cotton seed–cotton seed had highly significant effects on the simulated dynamic repose angle, and other contact parameters had no significant effect on the simulated dynamic repose angle; the static friction coefficient had a positive effect on the simulated dynamic repose angle, and the impact recovery coefficient had a negative effect on the simulated dynamic repose angle.
- (2)
- The results of the Box–Behnken test showed that the established quadratic regression model between test factors and the simulated dynamic repose angle had good accuracy and reliability. The optimal combination of contact parameters solved by the Design-Expert 10.0.4 software optimization module was 0.33 for the static friction coefficient of cotton seed–tough photosensitive resin, 0.06 for the impact recovery coefficient of cotton seed–cotton seed, 0.10 for the static friction coefficient of cotton seed–cotton seed, 0.13 for the impact recovery coefficient of cotton seed–tough photosensitive resin, 0.12 for the impact recovery coefficient of cotton seed–fully transparent photosensitive resin, and 0.29 for the static friction coefficient of cotton seed–fully transparent photosensitive resin.
- (3)
- The results of the validation tests of the rotating drum and seed-metering device showed that the relative errors of physical and simulation tests were less than 2% under the optimal combination of contact parameters, indicating that the discrete element models and calibrated contact parameters of the coated delinted cotton seeds had good accuracy and reliability.
- (4)
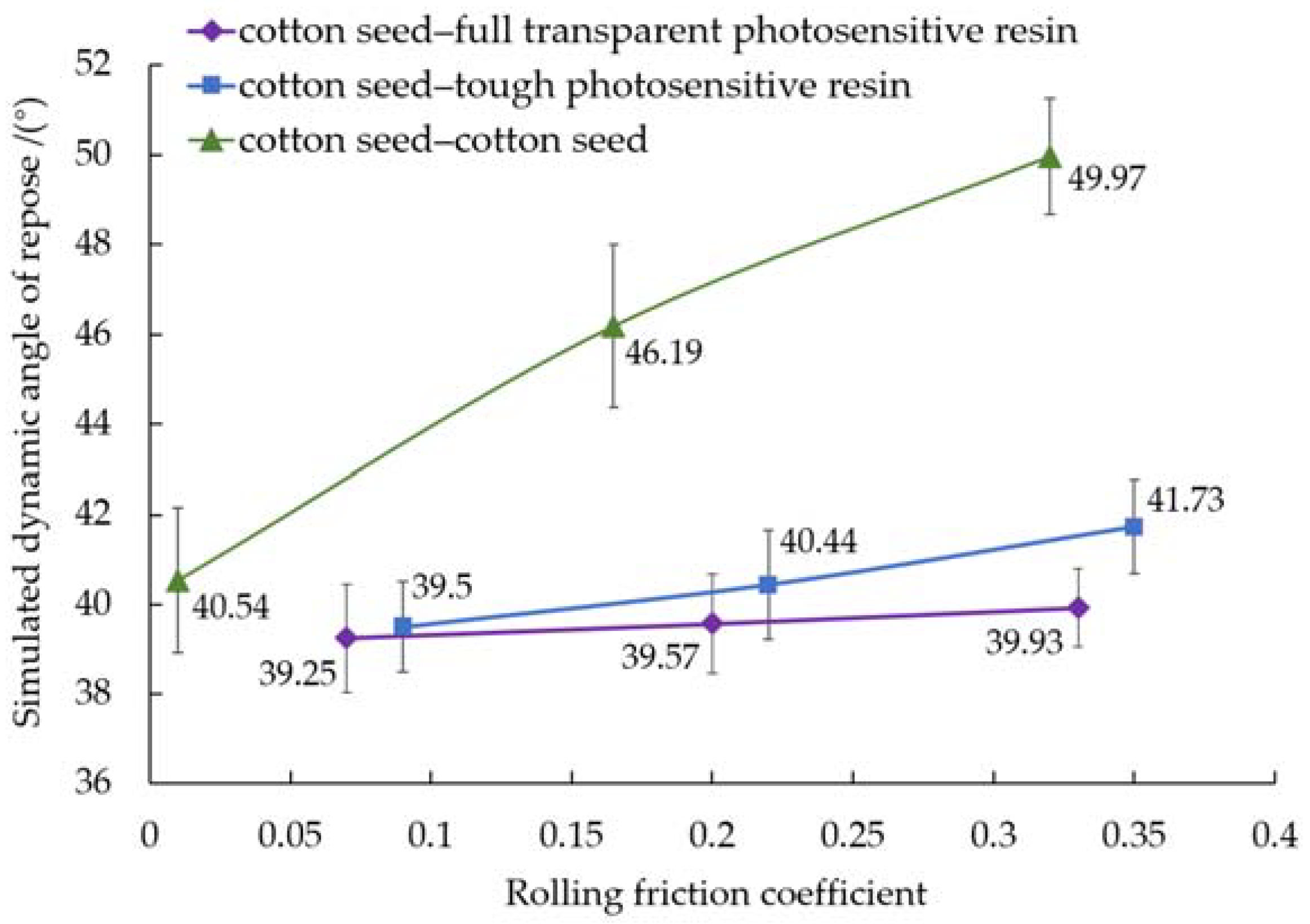
- The results of the single-factor test for the rolling friction coefficient showed that the rolling friction coefficient had a positive effect on the simulated dynamic repose angle.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mao, S.C.; Li, Y.B.; Dong, H.Z.; Bie, S.; Lin, Y.Z.; Dong, H.L. Cotton Cultivation in China, 1st ed.; Shanghai Science and Technology Press: Shanghai, China, 2013; pp. 55–65. [Google Scholar]
- Zhang, C.Y.; Kang, J.M.; Peng, Q.J.; Zhang, L.L.; Wang, X.Y.; Jian, S.C. Design and Test of Secondary Seed Feeding Mechanism of Air-suction Roller Dibbler for Cotton. Trans. Chin. Soc. Agric. Mach. 2021, 52, 106–116. [Google Scholar]
- Ni, X.D.; Xu, G.J.; Wang, Q.; Peng, X.R.; Wang, J.; Hu, B. Design and Experiment of Pneumatic Cylinder Array Precision Seed-metering Device for Cotton. Trans. Chin. Soc. Agric. Mach. 2017, 48, 58–67. [Google Scholar]
- Hu, M.J.; Xia, J.F.; Zheng, K.; Du, J.; Liu, Z.Y.; Zhou, M.K. Design and Experiment of Inside-filling Pneumatic High Speed Precision Seed-metering Device for Cotton. Trans. Chin. Soc. Agric. Mach. 2021, 52, 73–85. [Google Scholar]
- Ibrahim, E.J.; Liao, Q.X.; Wang, L.; Liao, Y.T.; Yao, L. Design and experiment of multi-row pneumatic precision metering device for rapeseed. Int. J. Agri. Biol. Eng. 2018, 11, 116–123. [Google Scholar]
- Yazgi, A.; Degirmencioglu, A. Measurement of seed spacing uniformity performance of a precision metering unit as function of the number of holes on vacuum plate. Measurement 2014, 56, 128–135. [Google Scholar] [CrossRef]
- Singh, R.C.; Singh, G.; Saraswat, D.C. Optimisation of Design and Operational Parameters of a Pneumatic Seed Metering Device for Planting Cotton seeds. Biosyst. Eng. 2005, 92, 429–438. [Google Scholar] [CrossRef]
- Wang, Y.B.; Li, H.W.; Hu, H.N.; He, J.; Wang, Q.J.; Lu, C.Y.; Liu, P.; He, D.; Lin, X. DEM—CFD coupling simulation and optimization of a self-suction wheat shooting device. Powder Technol. 2021, 393, 494–509. [Google Scholar] [CrossRef]
- Li, Z.D.; Yang, W.C.; Wu, Y.Y.; He, S.; Wang, W.W.; Chen, L.Q. Performance analysis and experiments of seed filling assisted by groove-tooth of pneumatic disc precision metering device for rapeseed. Trans. CSAE 2020, 36, 57–66. [Google Scholar]
- Gao, X.J.; Zhou, Z.Y.; Xu, Y.; Yu, Y.B.; Su, Y.; Cui, T. Numerical simulation of particle motion characteristics in quantitative seed feeding system. Powder Technol. 2020, 367, 643–658. [Google Scholar] [CrossRef]
- Du, X.; Liu, C.L.; Jiang, M.; Zhang, F.Y.; Yuan, H.; Yang, H.X. Design and experiment of self-disturbance inner-filling cell wheel maize precision seed-metering device. Trans. CSAE 2019, 35, 23–34. [Google Scholar]
- Lei, X.L.; Liao, Y.T.; Zhang, Q.S.; Wang, L.; Liao, Q.X. Numerical simulation of seed motion characteristics of distribution head for rapeseed and wheat. Comput. Elec. Agri. 2018, 150, 98–109. [Google Scholar] [CrossRef]
- Han, D.D.; Zhang, D.X.; Jing, H.R.; Yang, L.; Cui, T.; Ding, Y.Q.; Wang, Z.D.; Wang, Y.X.; Zhang, T.L. DEM-CFD coupling simulation and optimization of an inside-filling air-blowing maize precision seed-metering device. Comput. Elec. Agri. 2018, 150, 426–438. [Google Scholar] [CrossRef]
- Zhang, R.F.; Jiao, W.; Zhou, J.L.; Qi, B.; Liu, H.; Xia, Q.Q. Parameter Calibration and Experiment of Rice Seeds Discrete Element Model with Different Filling Particle Radius. Trans. Chin. Soc. Agric. Mach. 2020, 51, 227–235. [Google Scholar]
- Kanakabandi, C.K.; Goswami, T.K. Determination of properties of black pepper to use in discrete element modeling. J. Food Eng. 2019, 246, 111–118. [Google Scholar] [CrossRef]
- Cabiscol, R.; Finke, J.H.; Kwade, A. Calibration and interpretation of DEM parameters for simulations of cylindrical tablets with multi-sphere approach. Powder Technol. 2018, 327, 232–245. [Google Scholar] [CrossRef]
- Hou, Z.F.; Dai, N.Z.; Chen, Z.; Qiu, Y.; Zhang, X.W. Measurement and calibration of physical property parameters for Agropyron seeds in a discrete element simulation. Trans. CSAE 2020, 36, 46–54. [Google Scholar]
- Ma, W.P.; You, Y.; Wang, D.C.; Yin, S.J.; Huan, X.L. Parameter Calibration of Alfalfa Seed Discrete Element Model Based on RSM and NSGA-Ⅱ. Trans. Chin. Soc. Agric. Mach. 2020, 51, 136–144. [Google Scholar]
- Yu, Q.X.; Liu, Y.; Chen, X.B.; Sun, K.; Lai, Q.H. Calibration and Experiment of Simulation Parameters for Panax notoginseng Seeds Based on DEM. Trans. Chin. Soc. Agric. Mach. 2020, 51, 123–132. [Google Scholar]
- Ghodki, B.M.; Patel, M.; Namdeo, R.; Carpenter, G. Calibration of discrete element model parameters: Soybeans. Comput. Part. Mech. 2019, 6, 3–10. [Google Scholar] [CrossRef]
- Mohammad, M.; Tekeste, M.Z.; Rosentrater, K.A. Calibration and Validation of a Discrete Element Model of Corn Using Grain Flow Simulation in a Commercial Screw Grain Auger. T. Asabe 2017, 60, 1403–1415. [Google Scholar]
- Coetzee, C.J.; Els, D.N.J. Calibration of discrete element parameters and the modelling of silo discharge and bucket filling. Comput. Elec. Agri. 2009, 65, 198–212. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, J.; Wang, Y.; Yan, D.; Yu, Y. A study on the modelling method of maize-seed particles based on the discrete element method. Powder Technol. 2020, 374, 353–376. [Google Scholar] [CrossRef]
- Shi, L.R.; Ma, Z.T.; Zhao, W.Y.; Yang, X.P.; Sun, B.G.; Zhang, J.P. Calibration of simulation parameters of flaxed seeds using discrete element method and verification of seed-metering test. Trans. CSAE 2019, 35, 25–33. [Google Scholar]
- Wu, M.C.; Cong, J.L.; Yan, Q.; Zhu, T.; Peng, X.Y.; Wang, Y.S. Calibration and experiments for discrete element simulation parameters of peanut seed particles. Trans. CSAE 2020, 36, 30–38. [Google Scholar]
- Hu, M.J.; Zhou, Y.; Tang, Z.C.; Xu, Z.Y.; Wang, H.L.; Wang, P.T. Mechanical properties of the delinted and coated cotton seed. J. Anhui Agric. Univ. 2018, 45, 175–180. [Google Scholar]
- Gao, X.J.; Xu, Y.; He, X.W.; Zhang, D.X.; Yang, L.; Cui, T. Design and Experiment of Diversion Turbine of Air-assisted High Speed Maize Precision Seed Metering Device. Trans. Chin. Soc. Agric. Mach. 2019, 50, 42–52. [Google Scholar]
- Liu, W.Z.; He, J.; Li, H.W.; Li, X.Q.; Zheng, K.; Wei, Z.C. Calibration of Simulation Parameters for Potato Minituber Based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135.e142. [Google Scholar]
- Xing, J.J.; Zhang, R.; Wu, P.; Zhang, X.R.; Dong, X.H.; Chen, Y.; Ru, S.F. Parameter calibration of discrete element simulation model for latosol particles in hot areas of Hainan Province. Trans. CSAE 2020, 36, 158–166. [Google Scholar]
- Ma, Y.H. Agricultural Material Science, 1st ed.; Chemical Industry Press: Beijing, China, 2015; p. 90. [Google Scholar]
- Chou, S.H.; Hu, H.J.; Hsiau, S.S. Investigation of friction effect on granular dynamic behavior in a rotating drum. Adv. Powder Technol. 2016, 27, 1912–1921. [Google Scholar] [CrossRef]
- Mellmann, J. The Transverse Motion of Solids in Rotating Cylinders-Forms of Motion and Transition Behaviour. Powder Technol. 2001, 118, 251–270. [Google Scholar] [CrossRef]
- Huang, S. Research and Application of Numerical Simulation of Fluid Machinery, 1st ed.; South China University of Technology Press: Guangzhou, China, 2015; pp. 102–105. [Google Scholar]
- Wang, G.Q.; Hao, W.J.; Wang, J.X. Discrete Element Method and Its Practice in EDEM, 1st ed.; Northwest University of Technology Press: Xian, China, 2010; pp. 1–33. [Google Scholar]
- Bharadwaj, R.; Ketterhagen, W.R.; Hancock, B.C. Discrete element simulation study of a Freeman powder rheometer. Chem. Eng. Sci. 2010, 65, 5747–5756. [Google Scholar] [CrossRef]
- Maharjan, R.; Jeong, S.H. High shear seeded granulation: Its preparation mechanism, formulation, process, evaluation, and mathematical simulation. Powder Technol. 2020, 366, 667–688. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Ketterhagen, W.R. Modeling the motion and orientation of various pharmaceutical tablet shapes in a film coating pan using DEM. Int. J. Pharmaceut. 2011, 409, 137–149. [Google Scholar] [CrossRef]
- Wang, L.M.; Fan, S.Y.; Cheng, H.S.; Meng, H.B.; Shen, Y.J.; Wang, J.; Zhou, H.B. Calibration of contact parameters for pig manure based on EDEM. Trans. CSAE 2020, 36, 95–102. [Google Scholar]
- Cunha, R.N.; Santos, K.G.; Lima, R.N.; Duarte, C.R.; Barrozo, M.A.S. Repose angle of monoparticles and binary mixture: An experimental and simulation study. Powder Technol. 2016, 303, 203–211. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Poisson’s Ratio | Shear Modulus/(Pa) | Density/(kg·m−3) |
|---|---|---|---|
| Tough photosensitive resin | 0.42 | 1.04 × 109 | 1140 |
| Fully transparent photosensitive resin | 0.41 | 9.49 × 108 | 1268 |
| Symbol | Simulation Parameter | Levels | ||
|---|---|---|---|---|
| Low Level (−1) | Mid Level (0) | High Level (+1) | ||
| A | Impact recovery coefficient of cotton seed–tough photosensitive resin | 0.04 | 0.23 | 0.42 |
| B | Static friction coefficient of cotton seed–tough photosensitive resin | 0.30 | 0.36 | 0.42 |
| C | Impact recovery coefficient of cotton seed–fully transparent photosensitive resin | 0.03 | 0.18 | 0.33 |
| D | Static friction coefficient of cotton seed– fully transparent photosensitive resin | 0.26 | 0.29 | 0.32 |
| E | Impact recovery coefficient of cotton seed–cotton seed | 0.01 | 0.095 | 0.18 |
| F | Static friction coefficient of cotton seed– cotton seed | 0 | 0.05 | 0.10 |
| G, H, J, K, L | Virtual parameter | −1 | 0 | +1 |
| Test Serial Number | Test Factors | Simulated Dynamic Angle of Repose θ/(°) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | G | H | J | K | L | ||
| 1 | 1 | 1 | −1 | 1 | 1 | 1 | −1 | −1 | −1 | 1 | −1 | 40.02 ± 1.14 |
| 2 | −1 | 1 | 1 | −1 | 1 | 1 | 1 | −1 | −1 | −1 | 1 | 39.43 ± 0.57 |
| 3 | 1 | −1 | 1 | 1 | −1 | 1 | 1 | 1 | −1 | −1 | −1 | 38.06 ± 0.64 |
| 4 | −1 | 1 | −1 | 1 | 1 | −1 | 1 | 1 | 1 | −1 | −1 | 33.82 ± 0.82 |
| 5 | −1 | −1 | 1 | −1 | 1 | 1 | −1 | 1 | 1 | 1 | −1 | 37.33 ± 0.62 |
| 6 | −1 | −1 | −1 | 1 | −1 | 1 | 1 | −1 | 1 | 1 | 1 | 38.36 ± 1.02 |
| 7 | 1 | −1 | −1 | −1 | 1 | −1 | 1 | 1 | −1 | 1 | 1 | 30.01 ± 1.64 |
| 8 | 1 | 1 | −1 | −1 | −1 | 1 | −1 | 1 | 1 | −1 | 1 | 40.49 ± 1.15 |
| 9 | 1 | 1 | 1 | −1 | −1 | −1 | 1 | −1 | 1 | 1 | −1 | 33.94 ± 1.38 |
| 10 | −1 | 1 | 1 | 1 | −1 | −1 | −1 | 1 | −1 | 1 | 1 | 34.08 ± 0.90 |
| 11 | 1 | −1 | 1 | 1 | 1 | −1 | −1 | −1 | 1 | −1 | 1 | 31.05 ± 0.90 |
| 12 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | 31.51 ± 1.50 |
| Test Factors | Stdized Effect | Sum of Squares | Degree of Freedom | F-Value | p-Value | Contribution/% | Significance Ranking |
|---|---|---|---|---|---|---|---|
| A | −0.16 | 0.08 | 1 | 0.71 | 0.439 | 0.051 | 5 |
| B | 2.58 | 19.92 | 1 | 183.39 | <0.0001 ** | 13.136 | 2 |
| C | −0.053 | 0.01 | 1 | 0.08 | 0.790 | 0.006 | 6 |
| D | 0.45 | 0.60 | 1 | 5.51 | 0.066 | 0.395 | 4 |
| E | −0.8 | 1.90 | 1 | 17.53 | 0.009 ** | 1.256 | 3 |
| F | 6.55 | 128.58 | 1 | 1183.87 | <0.0001 ** | 84.799 | 1 |
| R2 = 0.9964; Adj R2 = 0.9921; CV = 0.92%; Adeq precision = 39.41 | |||||||
| Test Serial Number | B | E | F | Simulated Dynamic Angle of Repose θ/(°) |
|---|---|---|---|---|
| 1 | −1 | −1 | 0 | 35.95 ± 1.20 |
| 2 | 1 | −1 | 0 | 37.40 ± 2.12 |
| 3 | −1 | 1 | 0 | 34.15 ± 1.02 |
| 4 | 1 | 1 | 0 | 36.98 ± 0.79 |
| 5 | −1 | 0 | −1 | 31.24 ± 0.86 |
| 6 | 1 | 0 | −1 | 33.21 ± 0.59 |
| 7 | −1 | 0 | 1 | 37.15 ± 2.06 |
| 8 | 1 | 0 | 1 | 40.90 ± 2.28 |
| 9 | 0 | −1 | −1 | 33.21 ± 0.88 |
| 10 | 0 | 1 | −1 | 32.30 ± 0.88 |
| 11 | 0 | −1 | 1 | 40.70 ± 0.62 |
| 12 | 0 | 1 | 1 | 39.34 ± 0.73 |
| 13 | 0 | 0 | 0 | 36.07 ± 0.89 |
| 14 | 0 | 0 | 0 | 36.39 ± 0.74 |
| 15 | 0 | 0 | 0 | 36.95 ± 0.94 |
| 16 | 0 | 0 | 0 | 36.01 ± 1.40 |
| 17 | 0 | 0 | 0 | 36.55 ± 0.78 |
| Source of Variation | Sum of Squares | Degree of Freedom | F-Value | p-Value |
|---|---|---|---|---|
| Model | 116.88 | 9 | 95.34 | <0.0001 ** |
| B | 12.50 | 1 | 91.76 | <0.0001 ** |
| E | 2.52 | 1 | 18.50 | 0.0036 ** |
| F | 98.91 | 1 | 726.12 | <0.0001 ** |
| BE | 0.48 | 1 | 3.50 | 0.1038 |
| BF | 0.79 | 1 | 5.81 | 0.0467 * |
| EF | 0.05 | 1 | 0.37 | 0.5614 |
| B2 | 1.13 | 1 | 8.30 | 0.0236 * |
| E2 | 0.25 | 1 | 1.84 | 0.2166 |
| F2 | 0.26 | 1 | 1.94 | 0.2059 |
| Residual | 0.95 | 7 | ||
| Lack of Fit | 0.37 | 3 | 0.84 | 0.5400 |
| Pure Error | 0.59 | 4 | ||
| Cor Total | 117.83 | 16 | ||
| R2 = 0.9919; Adj R2 = 0.9815; CV = 1.02%; Adeq precision = 33.68 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, M.; Xia, J.; Zhou, Y.; Luo, C.; Zhou, M.; Liu, Z. Measurement and Calibration of the Discrete Element Parameters of Coated Delinted Cotton Seeds. Agriculture 2022, 12, 286. https://doi.org/10.3390/agriculture12020286
Hu M, Xia J, Zhou Y, Luo C, Zhou M, Liu Z. Measurement and Calibration of the Discrete Element Parameters of Coated Delinted Cotton Seeds. Agriculture. 2022; 12(2):286. https://doi.org/10.3390/agriculture12020286
Chicago/Turabian StyleHu, Mengjie, Junfang Xia, Yong Zhou, Chengming Luo, Mingkuan Zhou, and Zhengyuan Liu. 2022. "Measurement and Calibration of the Discrete Element Parameters of Coated Delinted Cotton Seeds" Agriculture 12, no. 2: 286. https://doi.org/10.3390/agriculture12020286
APA StyleHu, M., Xia, J., Zhou, Y., Luo, C., Zhou, M., & Liu, Z. (2022). Measurement and Calibration of the Discrete Element Parameters of Coated Delinted Cotton Seeds. Agriculture, 12(2), 286. https://doi.org/10.3390/agriculture12020286