
3D Locating System for Pests’ Laser Control Based on Multi-Constraint Stereo Matching

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
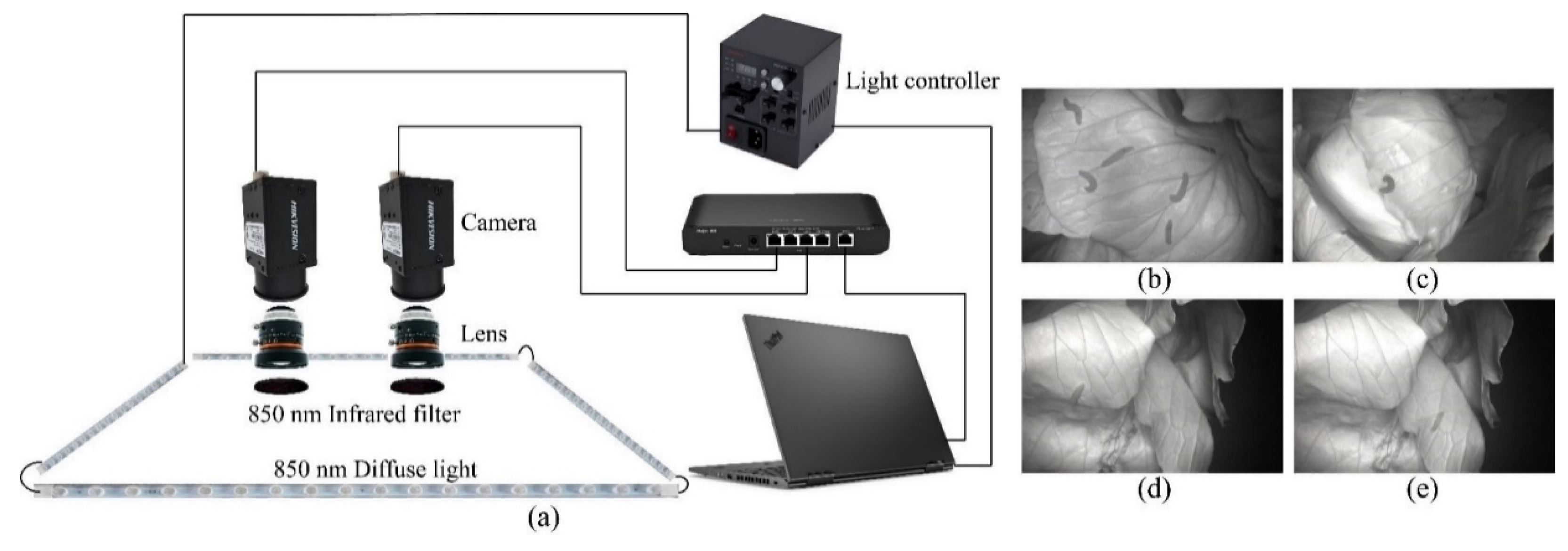
2.1. Binocular NIR Vision Unit
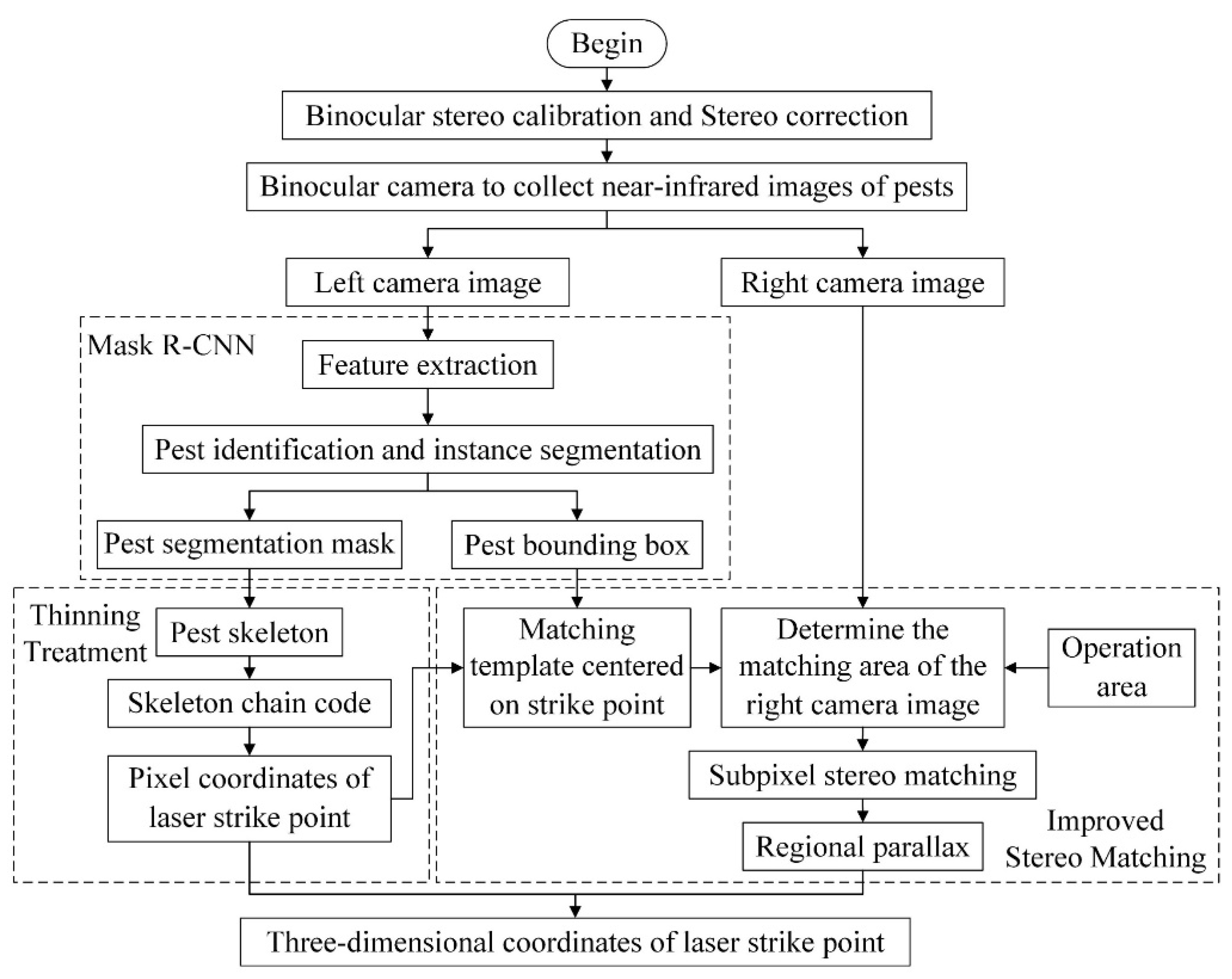
2.2. System Architecture
2.2.1. Instance Segmentation of Pieris rapae Image Area Based on Mask R-CNN
- (1)
- Mask R-CNN Model
- The feature extraction network ResNet50 [30] extracted multi-scale information from the input image and generated a series of feature maps.
- According to the mapping relationship between the feature map and the input image, the region proposal network (RPN) used the sliding window of the convolution layer to scan the anchor box in the feature map and generated a series of regions of interest (RoI) through classification and regression.
- The RoI Align determined the eigenvalue of each point in the RoI and then performed pooling and other operations to match and align the target candidate region obtained by the RPN network with the feature map.
- The feature maps output by RoI Align were input to the fully connected (FC) layers and the fully convolutional network (FCN). The former identified P. rapae and located the respective bounding boxes, and the latter segmented the pixel area of the larvae.
- (2)
- Dataset augmentation and labeling
- (3)
- Transfer training
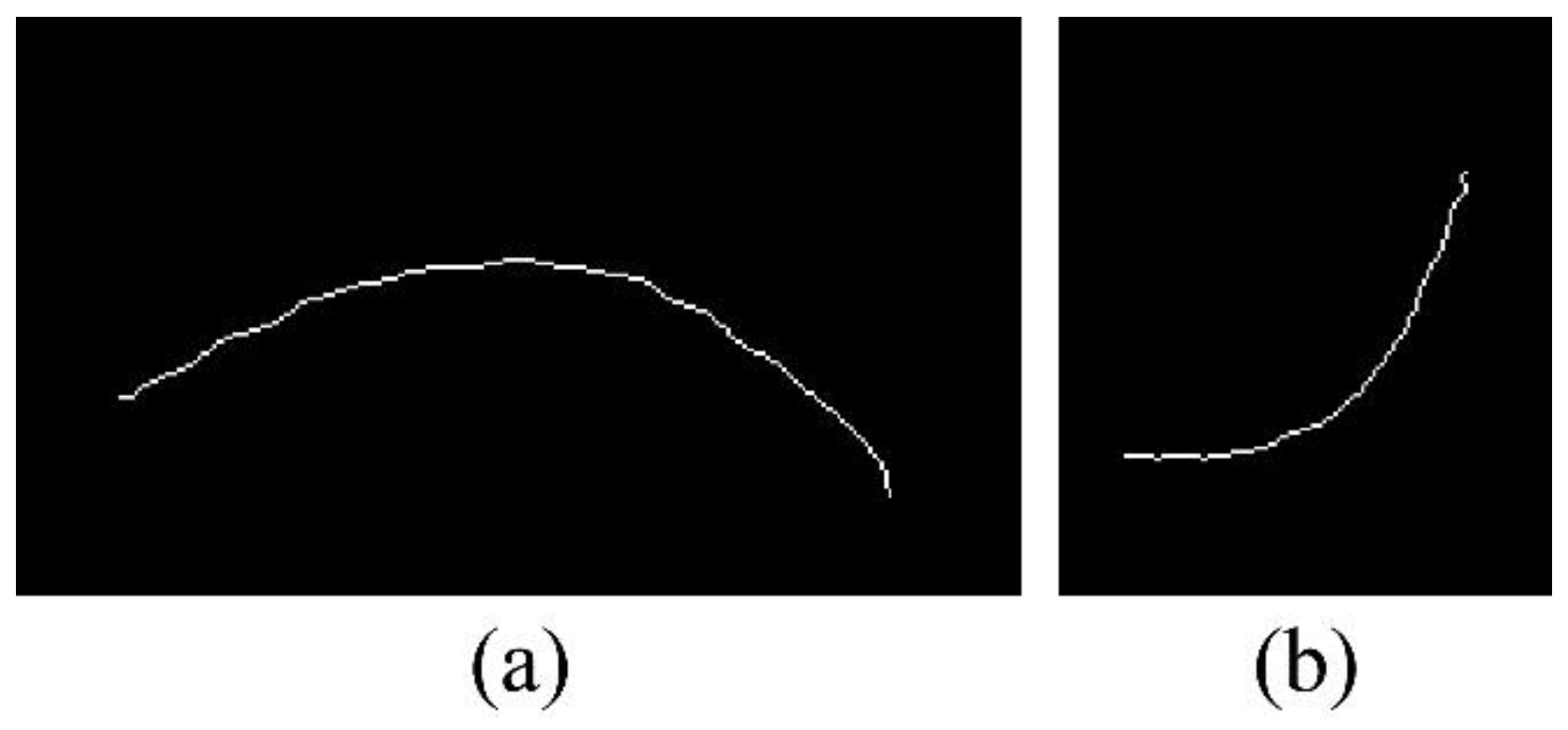
2.2.2. Pest Skeleton Extraction and Strike Point Location
- (1)
- Laser strike point
- (2)
- Pest skeleton extraction based on improved ZS thinning algorithm
- (3)
- Strike point location
2.2.3. The Multi-Constrained Stereo Matching Method
- (1)
- The first construct: Row Constraint
- (2)
- The second construct: Column Constraint
3. Test and Results
3.1. Experiments
3.1.1. Experiment 1: Accuracy Evaluation of Pest Identification and Instance Segmentation Network
3.1.2. Experiment 2: Performance Evaluation of the 3D Locating System
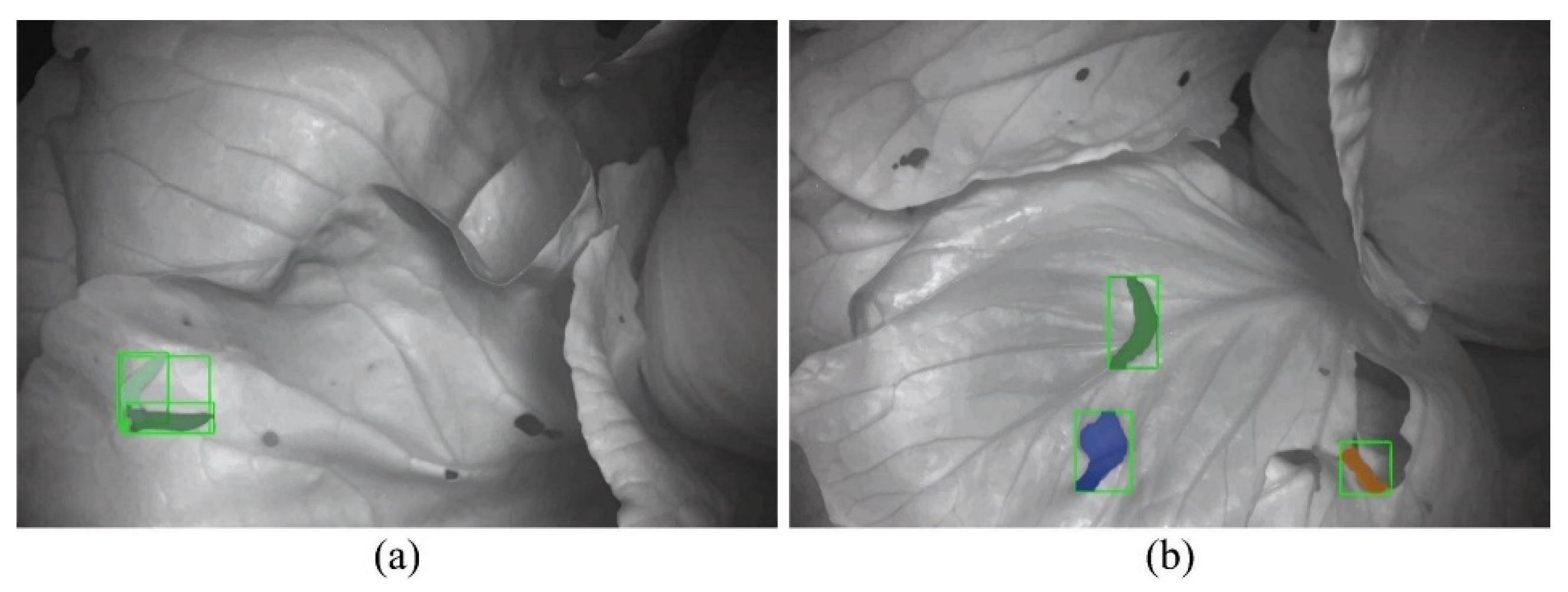
3.2. Validity Results of Mask R-CNN
3.3. 3D Localization Results of Field Pests
3.3.1. X-Axis and Y-Axis Location Error
3.3.2. Z-Axis Location Error
4. Discussion
4.1. Analyses of Instance Segmentation Result
4.2. Analyses of Location Result
4.3. Analyses of the Multi-Constraint Stereo Matching Result
4.4. Discussion about Further Improvement Aspects
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sumesh, N.; Chang, C.; Hsu, F.; Su, C.; Chen, S. Rapid laser pest control system with 3D small object detection. In Proceedings of the International Society for Optical Engineering (SPIE 11299)—AI and Optical Data Sciences, San Francisco, CA, USA, 25 March 2020. [Google Scholar] [CrossRef]
- Kaierle, S.; Marx, C.; Rath, T.; Hustedt, M. Find and Irradiate—Lasers Used for Weed Control: Chemical free elimination of unwanted plants. Laser Tech. J. 2013, 10, 44–47. [Google Scholar] [CrossRef]
- Enserink, M. Can the war on locusts be won? Science 2004, 306, 1880. [Google Scholar] [CrossRef] [PubMed]
- Keller, M.D.; Leahy, D.J.; Norton, B.J.; Mullen, E.R.; Marvit, M.; Makagon, A. Laser induced mortality of Anopheles stephensi mosquitoes. Sci. Rep. 2016, 6, 20936. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Xiang, Y.; Yang, Z.; Han, X.; Lin, J.; Hu, Z. A Laser irradiation method for controlling Pieris rapae larvae. Appl. Sci. 2021, 11, 9533. [Google Scholar] [CrossRef]
- Faruki, S.I.; Das, D.R.; Khan, A.R.; Khatun, M. Effects of ultraviolet (254 nm) irradiation on egg hatching and adult emergence of the flour beetles, Tribolium castaneum, T. confusum and the almond moth, Cadra cautella. J. Insect Sci. 2007, 7, 36. [Google Scholar] [CrossRef] [Green Version]
- Sorungbe, A.A.; Badmus, H.A.; Sulaimon, A.M. Effect of ultraviolet irradiation on egg hatching of tropical warehouse moth (Ephestia Cautella), development of its adult and mortality. Int. J. Res. Pharma. Bio. Sci. 2016, 3, 23–27. [Google Scholar]
- Cheng, X.; Zhang, Y.; Chen, Y.; Wu, Y.; Yue, Y. Pest identification via deep residual learning in complex background. Comput. Electron. Agric. 2017, 141, 351–356. [Google Scholar] [CrossRef]
- Ren, F.; Liu, W.; Wu, G. Feature reuse residual networks for insect pest recognition. IEEE Access 2019, 7, 122758–122768. [Google Scholar] [CrossRef]
- Ngugi, L.C.; Abelwahab, M.; Abo-Zahhad, M. Recent advances in image processing techniques for automated leaf pest and disease recognition—A review. Inf. Process. Agric. 2020, 8, 27–51. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar] [CrossRef]
- Jiao, L.; Dong, S.; Zhang, S.; Xie, C.; Wang, H. AF-RCNN: An anchor-free convolutional neural network for multi-categories agricultural pest detection. Comput. Electron. Agric. 2020, 174, 105522. [Google Scholar] [CrossRef]
- Tassis, L.M.; de Souza, J.E.T.; Krohling, R.A. A deep learning approach combining instance and semantic segmentation to identify diseases and pests of coffee leaves from in-field images. Comput. Electron. Agric. 2021, 186, 106191. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Hou, X.; Wang, Y.; Zhou, L.; Chen, X. An intelligent identification system combining image and DNA sequence methods for fruit flies with economic importance (Diptera: Tephritidae). Pest Manag. Sci. 2021, 77, 3382–3396. [Google Scholar] [CrossRef]
- Minakshi, M.; Bharti, P.; Bhuiyan, T.; Kariev, S.; Chellappan, S. A framework based on deep neural networks to extract anatomy of mosquitoes from images. Sci. Rep. 2020, 10, 13059. [Google Scholar] [CrossRef]
- Zhong, Y.; Gao, J.; Lei, Q.; Zhou, Y. A Vision-Based Counting and Recognition System for Flying Insects in Intelligent Agriculture. Sensors 2018, 18, 1489. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Yu, G.; Han, L.; Guo, T. Identification of four moth larvae based on near-infrared spectroscopy technology. Spectrosc. Lett. 2015, 48, 1–6. [Google Scholar] [CrossRef]
- Türker-Kaya, S.; Huck, C.W. A review of mid-infrared and near-infrared imaging: Principles, concepts and applications in plant tissue analysis. Molecules 2017, 22, 168. [Google Scholar] [CrossRef] [Green Version]
- Sankaran, S.; Maja, J.M.; Buchanon, S.; Ehsani, R. Huanglongbing (Citrus Greening) Detection Using Visible, Near Infrared and Thermal Imaging Techniques. Sensors 2013, 13, 2117–2130. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; El-Madany, T.S.; Filippa, G.; Ma, X.; Ahrens, B.; Carrara, A.; Gonzalez-Cascon, R.; Cremonese, E.; Galvagno, M.; Hammer, T.W.; et al. Using Near-Infrared-Enabled Digital Repeat Photography to Track Structural and Physiological Phenology in Mediterranean Tree–Grass Ecosystems. Remote Sens. 2018, 10, 1293. [Google Scholar] [CrossRef] [Green Version]
- Hu, Z.; Xiang, Y.; Li, Y.; Long, Z.; Liu, A.; Dai, X.; Lei, X.; Tang, Z. Research on Identification Technology of Field Pests with Protective Color Characteristics. Appl. Sci. 2022, 12, 3810. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, J.; Zeng, Z.; Zou, X.; Chen, M. Research on vision pre-positioning for litchi picking robot under large field of view. Trans. Chin. Soc. Agric. Eng. 2019, 35, 48–54. [Google Scholar] [CrossRef]
- Jiao, J.; Wang, R.; Wang, W.; Dong, S.; Wang, Z.; Gao, W. Local stereo matching with improved matching cost and disparity refinement. IEEE MultiMedia 2014, 21, 16–27. [Google Scholar] [CrossRef]
- Zhang, F.; Prisacariu, V.; Yang, R.; Torr, P.H. Ga-net: Guided aggregation net for end-to-end stereo matching. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; Available online: https://arxiv.org/pdf/1904.06587v1.pdf (accessed on 11 April 2022).
- Liu, J.G.; Ji, G.; Yan, F.W.; Shen, J.H.; Sun, Y.F. Stereo matching network based on disparity optimization. Comput. Eng. 2022, 48, 220–228. [Google Scholar] [CrossRef]
- Scharstein, D.; Taniai, T.; Sinha, S.N. Semi-global stereo matching with surface orientation priors. In Proceedings of the 2017 International Conference on 3D Vision (3DV), Qingdao, China, 10–12 October 2017. [Google Scholar] [CrossRef] [Green Version]
- Lu, Z.; Wang, J.; Li, Z.; Chen, S.; Wu, F. A resource-efficient pipelined architecture for real-time semi-global stereo matching. IEEE T. Circ. Syst. Vid. 2021, 32, 660–673. [Google Scholar] [CrossRef]
- Chen, Y.N.; Ma, J. Study on the larva age markers of three important vegetable pests. J. Changjiang Veg. 1994, 2, 17–18. [Google Scholar]
- Yu, X.; Fan, Z.; Wan, H.; He, Y.; Du, J.; Li, N.; Yuan, Z.; Xiao, G. Positioning, Navigation, and Book Accessing/Returning in an Autonomous Library Robot using Integrated Binocular Vision and QR Code Identification Systems. Sensors 2019, 19, 783. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016. [Google Scholar]
- Yu, X.G.; Wu, X.M.; Luo, C.B.; Ren, P. Deep learning in remote sensing scene classification: A data augmentation enhanced convolutional neural network framework. GISci. Remote Sens. 2017, 54, 741–758. [Google Scholar] [CrossRef] [Green Version]
- Powell, J.A. Lepidoptera. In Encyclopedia of Insects, 2nd ed.; Resh, V.H., Cardé, R.T., Eds.; Academic Press: New York, NY, USA, 2009; pp. 559–586. [Google Scholar]
- Yuan, L.Y.; Zhou, H.; Han, D.; Xu, G.D. Improved skeleton extraction algorithm with smoothing iterations. Comput. Eng. Appl. 2020, 56, 188–193. [Google Scholar] [CrossRef]
- Žalik, B.; Mongus, D.; Lukač, N.; Žalik, K.R. Efficient chain code compression with interpolative coding. Inform. Sci. 2018, 439, 39–49. [Google Scholar] [CrossRef]
- Kaehler, A.; Bradski, G. Learning OpenCV 3; OReilly Media, Inc.: Sebastopol, CA, USA, 2016; pp. 350–353. [Google Scholar]
- Luo, L.; Zou, X.; Ye, M.; Yang, Z.; Zhang, C.; Zhu, N.; Wang, C. Calculation and localization of bounding volume of grape for undamaged fruit picking based on binocular stereo vision. Trans. Chin. Soc. Agric. Eng. 2016, 32, 41–47. [Google Scholar] [CrossRef]
- Zhang, L.; Li, C.; Fan, Y.; Zhang, X.; Zhao, J. Physician-Friendly Tool Center Point Calibration Method for Robot-Assisted Puncture Surgery. Sensors 2021, 21, 366. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number 1 | Precision (%) | Recall (%) | F1 (%) | |||
|---|---|---|---|---|---|---|
| N | TP | FP | FN | |||
| 158 | 154 | 3 | 4 | 95.65 | 97.47 | 96.55 |
| Parameters | Left Camera | Right Camera |
|---|---|---|
| Focus/mm | 6 | |
| Cell size/μm | 2.4 (Sx) × 2.4 (Sy) | |
| Center column (Cx)/pixel | 1589.60 | 1609.84 |
| Center row (Cy)/pixel | 1034.15 | 1051.87 |
| 2nd order radial distortion (K1)/1/pixel2 | −0.087540 | −0.086044 |
| 4th order radial distortion (K2)/1/pixel4 | 0.162294 | 0.155954 |
| 6th order radial distortion (K3)/1/pixel6 | 0.000185 | 0.000337 |
| 2nd order tangential distortion (P1)/1/pixel2 | 0.000210 | −0.000308 |
| 2nd order tangential distortion (P2)/1/pixel2 | −0.065631 | −0.056233 |
| Image size/pixel | 3072(H) × 2048(V) | |
| Baseline distance/mm | 49.50 | |
| Reprojection error/pixel | 0.36 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Feng, Q.; Lin, J.; Hu, Z.; Lei, X.; Xiang, Y. 3D Locating System for Pests’ Laser Control Based on Multi-Constraint Stereo Matching. Agriculture 2022, 12, 766. https://doi.org/10.3390/agriculture12060766
Li Y, Feng Q, Lin J, Hu Z, Lei X, Xiang Y. 3D Locating System for Pests’ Laser Control Based on Multi-Constraint Stereo Matching. Agriculture. 2022; 12(6):766. https://doi.org/10.3390/agriculture12060766
Chicago/Turabian StyleLi, Yajun, Qingchun Feng, Jiewen Lin, Zhengfang Hu, Xiangming Lei, and Yang Xiang. 2022. "3D Locating System for Pests’ Laser Control Based on Multi-Constraint Stereo Matching" Agriculture 12, no. 6: 766. https://doi.org/10.3390/agriculture12060766
APA StyleLi, Y., Feng, Q., Lin, J., Hu, Z., Lei, X., & Xiang, Y. (2022). 3D Locating System for Pests’ Laser Control Based on Multi-Constraint Stereo Matching. Agriculture, 12(6), 766. https://doi.org/10.3390/agriculture12060766