




Research on Path Tracking of Articulated Steering Tractor Based on Modified Model Predictive Control


Abstract
:1. Introduction
2. Materials and Methods
2.1. Kinematics Model of the Articulated Steering Tractor
2.1.1. Front Wheel Steering Kinematic Model
2.1.2. Kinematic Model of Articulated Steering
2.2. Multi-Body Dynamics Model of the Articulated Steering Tractor
2.3. Parametric Adaptive Path Tracking Controller Design
2.3.1. MPC Path Tracking Algorithm Based on Kinematic Model
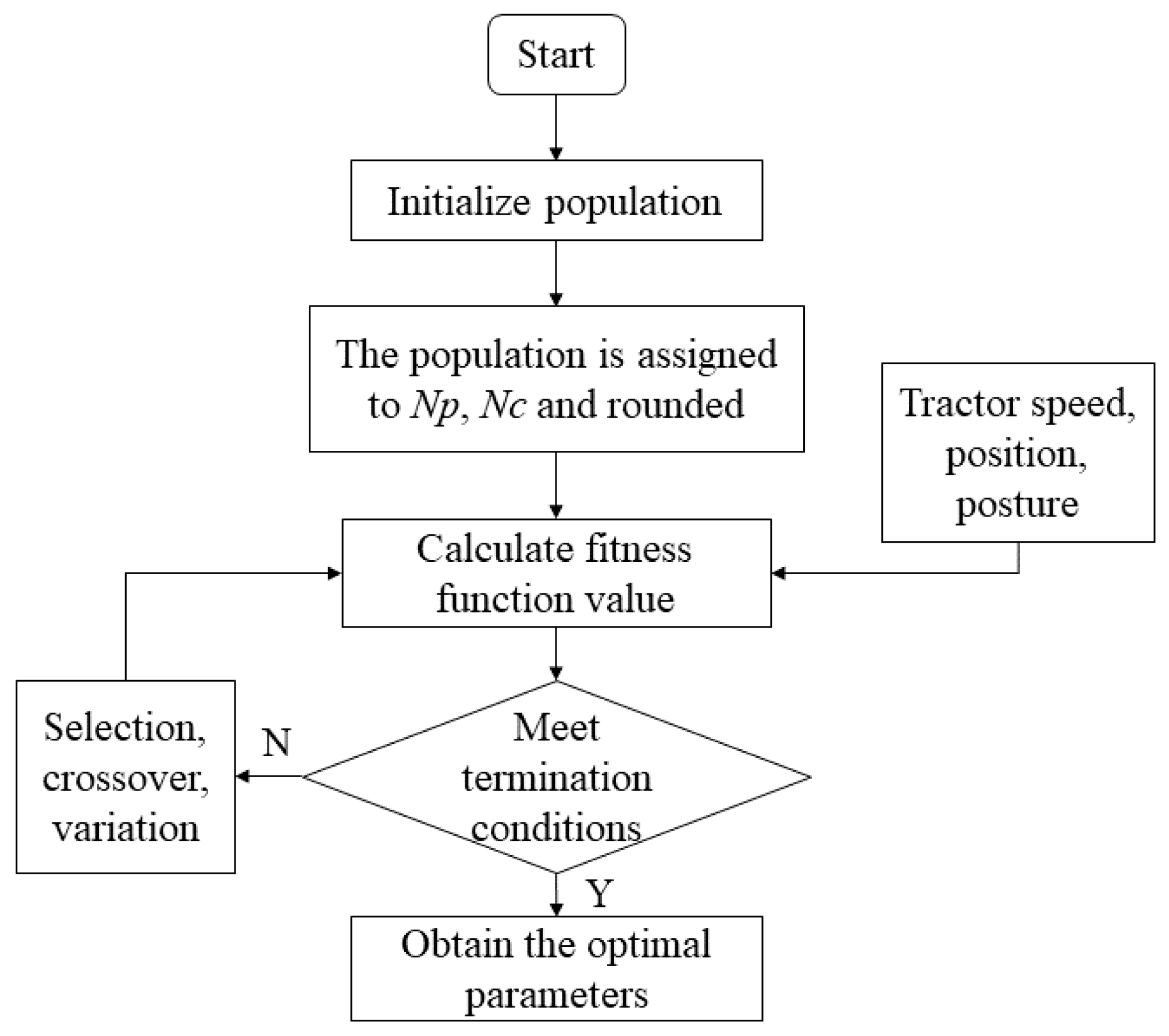
2.3.2. Genetic Algorithm to Optimize Time-Domain Parameters
3. Results and Discussion
3.1. Simulation Test
3.1.1. Construction of the Simulation System
3.1.2. U-Shaped Curve Path Tracking Simulation
3.1.3. Figure-Eight-Shaped Curve Path Tracking Simulation
3.1.4. Complex Curve Path Tracking Simulation
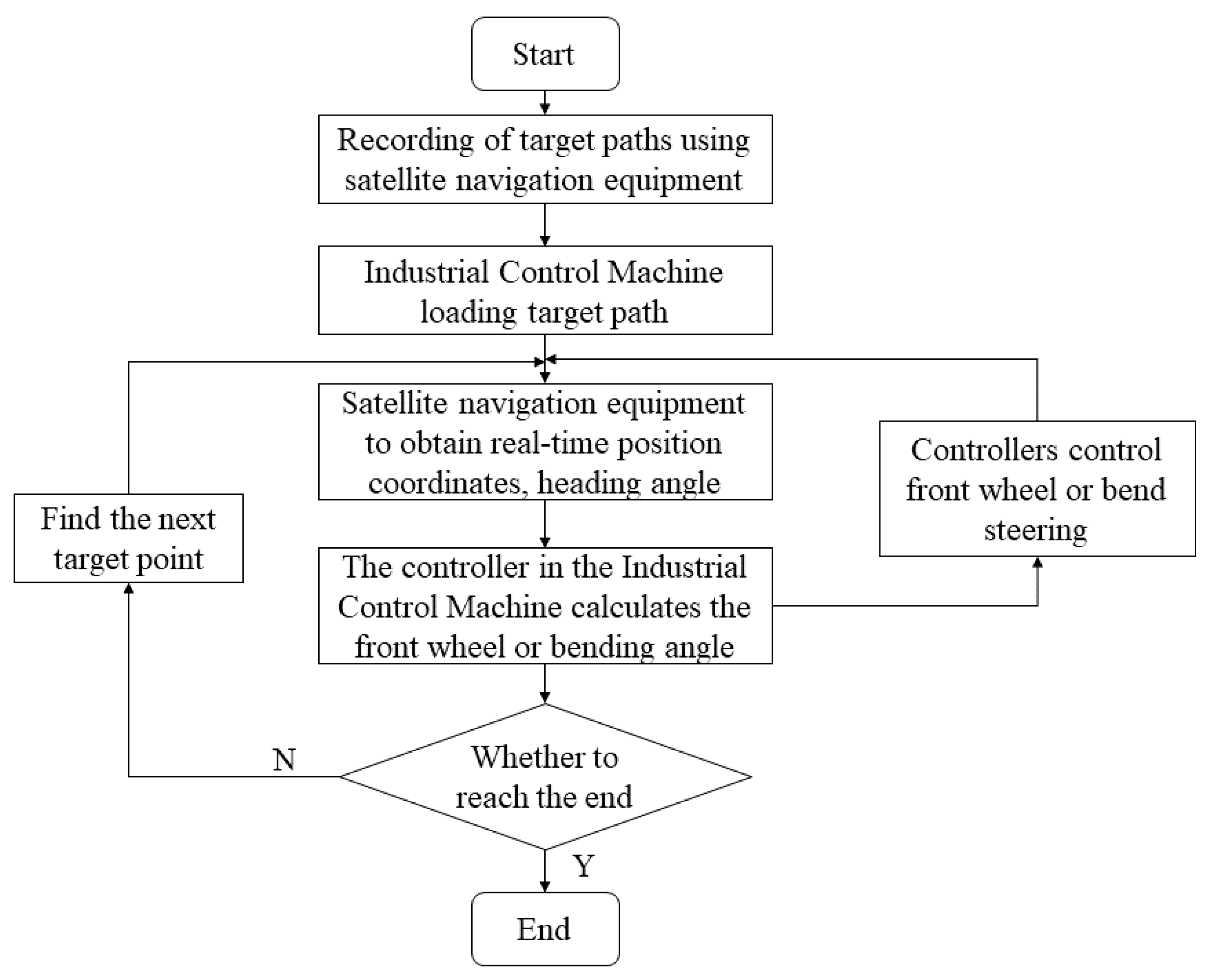
3.2. Test Verification
3.2.1. Straight-Line Path
3.2.2. Front Wheel Steering Path
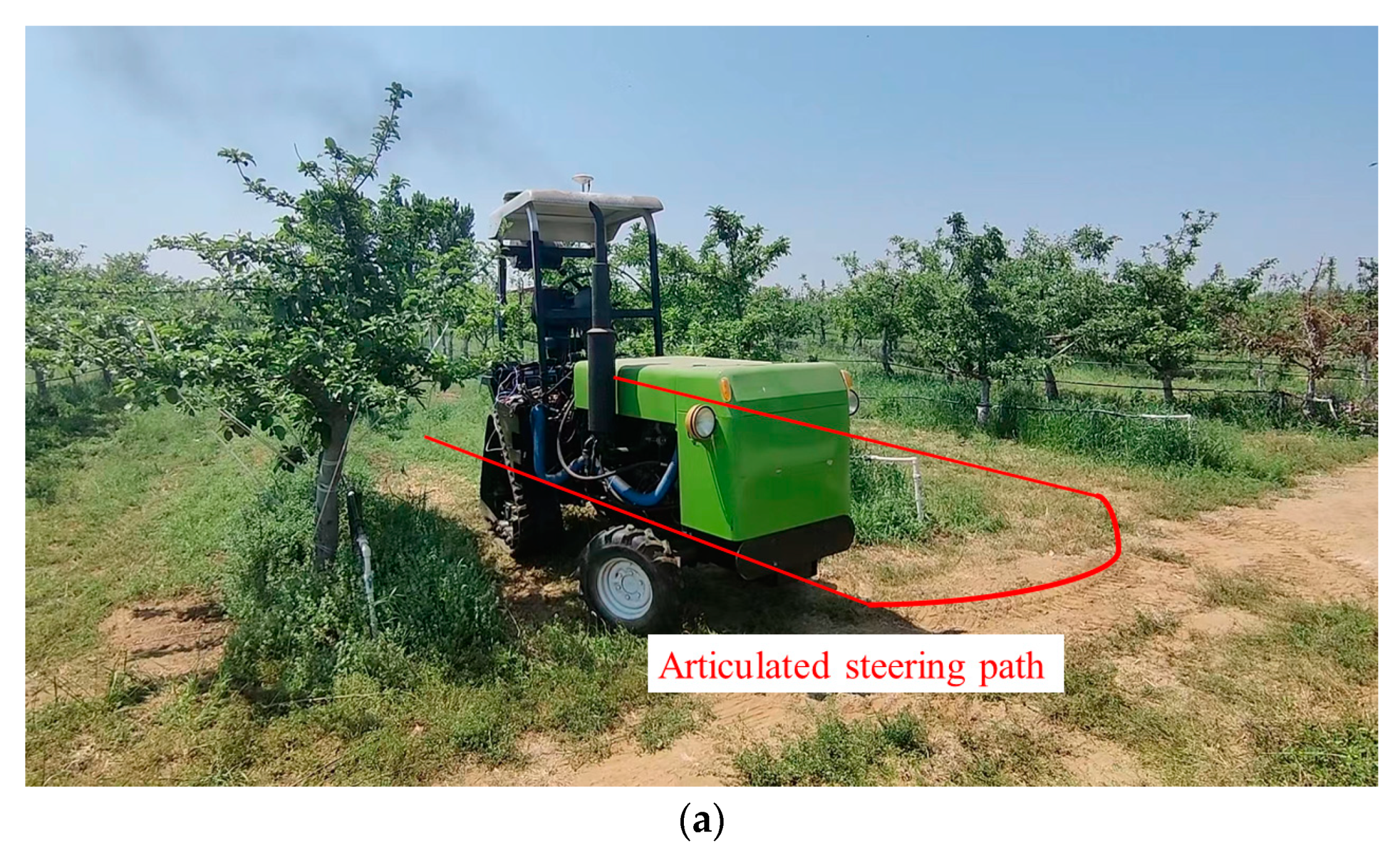
3.2.3. Articulated Steering Path
4. Conclusions
- The kinematics model and multi-body dynamics model of the articulated steering tractor were established. Then, the co-simulations by RecurDyn and Simulink were conducted under a U-shaped, figure-eight-shaped and complex curves path. The maximum lateral deviations of the adaptive MPC were reduced by 59.0%, 24.9% and 13.2%, respectively. At the same time, the average lateral deviations were reduced by 72%, 43.5% and 20.3% compared with the traditional MPC. The maximum heading deviations of the adaptive MPC were reduced by 44.6%, 11.9% and 24.1%, respectively. The average lateral deviations were reduced by 58.7%, 74.9% and 68.5%.
- Taking the articulated steering tractor as the test platform, the performance of adaptive MPC was tested in real tractors through a straight-line path, front wheel steering path and articulated steering path. The results indicated that the maximum lateral deviations of the adaptive MPC were reduced by 67.8%, 44.7% and 45.1%, respectively. Compared with the traditional MPC, the average lateral deviations of the adaptive MPC were reduced by 65.3%, 57.4% and 60.9%, respectively. The maximum heading deviations of the adaptive MPC were reduced by 26.8%, 44.9% and 50.2%, respectively. The average lateral deviations were reduced by 28.1%, 31.4% and 34.7%.
- The results of simulations and real tractor tests show that the real-time and path tracking performance of the proposed adaptive MPC is superior to the traditional MPC. Adaptive MPC can adjust the tractor faster when deviations occur, and the adjustment frequency of adaptive MPC is faster and the effect is better. The adaptive MPC can effectively enhance the path tracking accuracy of the articulated steering tractor.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Franceschetti, B.; Rondelli, V.; Capacci, E. Lateral Stability Performance of Articulated Narrow-Track Tractors. Agronomy 2021, 11, 2512. [Google Scholar] [CrossRef]
- Liang, C.; Pan, K.; Zhao, M.; Lu, M. Multi-Node Path Planning of Electric Tractor Based on Improved Whale Optimization Algorithm and Ant Colony Algorithm. Agriculture 2023, 13, 586. [Google Scholar] [CrossRef]
- Innam, L.; Kyunghyun, L.; Jeehyong, L.; Kwanho, Y. Autonomous Greenhouse Sprayer Navigation Using Automatic Tracking Algorithm. Appl. Eng. Agric. 2015, 31, 17–21. [Google Scholar] [CrossRef]
- Shutske, J.M. Agricultural automation & autonomy: Safety and Risk Assessment Must be at the Forefront. J. Agromed. 2022, 28, 5–10. [Google Scholar] [CrossRef]
- Md-Tahir, H.; Zhang, J.; Zhou, Y.; Sultan, M.; Ahmad, F.; Du, J.; Ullah, A.; Hussain, Z.; Xia, J. Engineering Design, Kinematic and Dynamic Analysis of High Lugs Rigid Driving Wheel, a Traction Device for Conventional Agricultural Wheeled Tractors. Agriculture 2023, 13, 493. [Google Scholar] [CrossRef]
- Huang, Y.; Hoffmann, W.C.; Lan, Y.; Wu, W.; Fritz, B.K. Development of a Spray System for an Unmanned Aerial Vehicle Platform. Appl. Eng. Agric. 2009, 25, 803–809. [Google Scholar] [CrossRef]
- Wang, Z.; Xin, P.; Sun, H.T. Path Tracking of Unmanned Vehicles Based on Contraction Constraint Model Predictive Control. Control. Decis. 2022, 37, 625–634. [Google Scholar]
- Zheng, J.; Wang, L.; Wang, X.; Shi, Y.; Yang, Z. Parameter Calibration of Cabbages (Brassica oleracea L.) Based on the Discrete Element Method. Agriculture 2023, 13, 555. [Google Scholar] [CrossRef]
- DiazdelRio, F.; SanchezCuevas, P.; IñigoBlasco, P.; SevillanoRamos, J.L. Improving Tracking of Trajectories through Tracking Rate Regulation: Application to UAVs. Sensors 2022, 22, 9795. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.C.; Zhang, H.H.; Feng, Y.X. MPC-Based Obstacle Avoidance Path Tracking Control for Distributed Drive Electric Vehicles. World Electr. Veh. J. 2022, 13, 221. [Google Scholar] [CrossRef]
- Zheng, K.; Zhao, X.; Han, C.; He, Y.; Zhai, C.; Zhao, C. Design and Experiment of an Automatic Row-Oriented Spraying System Based on Machine Vision for Early-Stage Maize Corps. Agriculture 2023, 13, 691. [Google Scholar] [CrossRef]
- Huang, Y.R.; Fu, J.H.; Xu, S.Y.; Han, T.L.; Yu, W. Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS. Agriculture 2022, 12, 1169. [Google Scholar] [CrossRef]
- Qiang, S.; Mao, H.P.; Guan, X.P. Numerical Simulation and Experimental Verification of the Deposition Concentration of an Unmanned Aerial Vehicle. Appl. Eng. Agric. 2019, 35, 367–376. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, C.; Gao, Z.; Sugirbay, A.; Chen, J.; Chen, Y. Research on 2D Laser Automatic Navigation Control for Standardized Orchard. Appl. Sci. 2020, 10, 2763. [Google Scholar] [CrossRef]
- Kang, N.; Han, Y.; Wang, B.Y. Linear quadratic regulator based on extended state observer–based active disturbance rejection control of autonomous vehicle path following control. J. Syst. Control. Eng. 2023, 273, 102–120. [Google Scholar] [CrossRef]
- Beal, C.E.; Gerdes, J.C. Model Predictive Control for Vehicle Stabilization at the Limits of Handling. IEEE Trans. Control. Syst. Technol. 2013, 21, 1258–1269. [Google Scholar] [CrossRef]
- Arun, M.; Hiroyuki, O.; Tatsuya, S. Path tracking control using model predictive control with on GPU implementation for autonomous driving. J. Arid. Land Stud. 2018, 28, 163–167. [Google Scholar] [CrossRef]
- Zhang, C.; Chu, D.; Liu, S. Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control. IEEE Intell. Transp. Syst. Mag. 2019, 11, 29–40. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.W. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints. IEEE Trans. Veh. Technol. 2017, 66, 52–64. [Google Scholar] [CrossRef]
- Mata, S.; Zubizarreta, A.; Pinto, C. Robust tube-based model predictive control for lateral path tracking. IEEE Trans. Intell. Veh. 2019, 4, 569–577. [Google Scholar] [CrossRef]
- Wei, C.; Romano, R.; Merat, N. Risk-based autonomous vehicle motion control with considering human driver’s behaviour. Transp. Res. C 2019, 107, 1–14. [Google Scholar] [CrossRef]
- Liu, L.X.; Guo, X.; Fang, Y.C. A Reinforcement Learning-Based Strategy of Path Following for Snake Robots with an Onboard Camera. Sensors 2022, 22, 9867. [Google Scholar] [CrossRef] [PubMed]
- Bai, G.X.; Meng, Y.; Liu, L.; Gu, Q.; Huang, J.; Liang, G.D. Path Tracking for Car-like Robots Based on Neural Networks with NMPC as Learning Samples. Electronics 2022, 24, 4232. [Google Scholar] [CrossRef]
- Hua, Z.X. Overview of path tracking control algorithms for autonomous vehicles. Equip. Manuf. Technol. 2021, 6, 100–103. [Google Scholar]
- Liu, P.T.; Wang, S.K.; Wang, J.Z. Design and application of unmanned control algorithm for seismic vehicle. J. Mech. Eng. 2022, 58, 211–220. [Google Scholar]
- Bai, G.X.; Liu, L.; Meng, Y.; Liu, S.Y. Real-time path tracking of mobile robot based on nonlinear model predictive control. J. Agric. Mach. 2020, 51, 47–52+60. [Google Scholar]
- Meng, Y.; Gan, X.; Bai, G.X. Path tracking predictive control of articulated vehicle for underground mine based on preview distaNce. J. Eng. 2019, 41, 662–671. [Google Scholar]
- Li, S.X.; Xu, B.; Hu, M.J. Multi-point preview path tracking method for articulated vehicles based on dynamic model predictive control. Automot. Eng. 2021, 43, 1187–1194. [Google Scholar]
- Joseph, C.; Mehrez, M.W.; Han, J.; Jeon, S.; Melek, W. Model Predictive Path Following Control without terminal constraints for holonomic mobile robots. Control. Eng. Pract. 2023, 132, 105406. [Google Scholar] [CrossRef]
- Yue, J.; Xu, X.; Zhang, L.; Zou, T. Model free predictive path tracking control of variable-configuration unmanned ground vehicle. ISA Trans. 2022, 129, 485–494. [Google Scholar] [CrossRef]
- Nie, Y.X.; Hua, Y.D.; Zhang, M.L.; Zhang, X.J. Intelligent Vehicle Trajectory Tracking Control Based on VFF-RLS Road Friction Coefficient Estimation. Electronics 2022, 11, 3119. [Google Scholar] [CrossRef]
- Fu, Z.Q.; Xiong, L.; Qian, Z.X.; Leng, B.; Zeng, D.Q.; Huang, Y.J. Model Predictive Trajectory Optimization and Tracking in Highly Constrained Environments. Int. J. Automot. Technol. 2022, 23, 927–938. [Google Scholar] [CrossRef]
- Chen, X.; Peng, D.; Hu, J.B.; Li, C.; Zheng, S.L.; Zhang, W.H. Adaptive torsional vibration active control for hybrid electric powertrains during start-up based on model prediction. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 2219–2229. [Google Scholar] [CrossRef]
- Vu, T.M.; Moezzi, R.; Cyrus, J.; Hlava, J.P. Parallel Hybrid Electric Vehicle Modelling and Model Predictive Control. Appl. Sci. 2021, 11, 10668. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural Artificial Systems; MIT Press: Cambridge, UK, 1975. [Google Scholar]
- Mohammadi, S.; Hejazi, S.R. Using particle swarm optimization and genetic algorithms for optimal control of non-linear fractional-order chaotic system of cancer cells. Math. Comput. Simul. 2022, 206, 538–560. [Google Scholar] [CrossRef]
- Dong, T.S.; Chen, S.Y.; Huang, H.; Han, C.; Dai, Z.Q.; Yang, Z.H. Large-Scale Truss Topology and Sizing Optimization by an Improved Genetic Algorithm with Multipoint Approximation. Appl. Sci. 2021, 21, 407. [Google Scholar] [CrossRef]
- Ochelska, M.J.; Poniszewska, M.; Aneta, M.W. Selected Genetic Algorithms for Vehicle Routing Problem Solving. Electronics 2021, 10, 3147. [Google Scholar] [CrossRef]
- Zhang, Z.F.; Xie, D.Q.; Lv, F.; Liu, R.K.; Yang, Y.W. Intelligent geometry compensation for additive manufactured oral maxillary stent by genetic algorithm and backpropagation network. Comput. Biol. Med. 2023, 157, 106716. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Overall vehicle mass (kg) | 1992.2 | Maximum climbing degree (°) | 30 |
| Front body mass (kg) | 632.8 | Front wheel spacing (mm) | 930 |
| Rear body mass (kg) | 1359.4 | Rear wheel spacing (mm) | 1080 |
| Length (mm) | 3100 | Wheelbase (mm) | 1850 |
| Width (mm) | 1230 | Maximum articulated angle (°) | 34 |
| Height (mm) | 1640 | Crawler grounding length (mm) | 460 |
| Minimum radius of front wheel steering (m) | 4.0 | Minimum radius of articulated steering (m) | 2.2 |
| Category | Category | MPC | Adaptive MPC |
|---|---|---|---|
| lateral deviation (cm) | Maximum | 15.13 | 6.21 |
| Average | 7.53 | 2.10 | |
| SD | 4.71 | 2.84 | |
| heading deviation (°) | Maximum | 14.45 | 8.00 |
| Average | 4.19 | 1.73 | |
| SD | 3.14 | 2.00 |
| Category | Category | MPC | Adaptive MPC |
|---|---|---|---|
| lateral deviation (cm) | Maximum | 22.41 | 16.83 |
| Average | 21.31 | 12.05 | |
| SD | 2.37 | 1.97 | |
| heading deviation (°) | Maximum | 4.54 | 4.00 |
| Average | 4.26 | 1.07 | |
| SD | 0.60 | 0.45 |
| Category | Category | MPC | Adaptive MPC |
|---|---|---|---|
| lateral deviation (cm) | Maximum | 22.34 | 19.38 |
| Average | 6.99 | 5.57 | |
| SD | 5.37 | 4.34 | |
| heading deviation (°) | Maximum | 7.01 | 5.32 |
| Average | 1.97 | 0.62 | |
| SD | 1.56 | 0.80 |
| Category | Category | MPC | Adaptive MPC |
|---|---|---|---|
| lateral deviation (cm) | Maximum | 9.39 | 3.02 |
| Average | 2.19 | 0.76 | |
| SD | 2.21 | 0.69 | |
| heading deviation (°) | Maximum | 8.73 | 6.39 |
| Average | 1.85 | 1.33 | |
| SD | 2.21 | 1.42 |
| Category | Category | MPC | Adaptive MPC |
|---|---|---|---|
| lateral deviation (cm) | Maximum | 22.00 | 12.17 |
| Average | 4.69 | 2.00 | |
| SD | 5.38 | 2.52 | |
| heading deviation (°) | Maximum | 11.44 | 6.30 |
| Average | 2.74 | 1.88 | |
| SD | 2.94 | 2.10 |
| Category | Category | MPC | Adaptive MPC |
|---|---|---|---|
| lateral deviation (cm) | Maximum | 18.24 | 10.01 |
| Average | 5.45 | 2.22 | |
| SD | 3.84 | 1.86 | |
| heading deviation (°) | Maximum | 13.07 | 6.51 |
| Average | 2.91 | 1.90 | |
| SD | 2.60 | 1.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, B.; Su, X.; Yu, H.; Guo, W.; Zhang, Q. Research on Path Tracking of Articulated Steering Tractor Based on Modified Model Predictive Control. Agriculture 2023, 13, 871. https://doi.org/10.3390/agriculture13040871
Zhou B, Su X, Yu H, Guo W, Zhang Q. Research on Path Tracking of Articulated Steering Tractor Based on Modified Model Predictive Control. Agriculture. 2023; 13(4):871. https://doi.org/10.3390/agriculture13040871
Chicago/Turabian StyleZhou, Baocheng, Xin Su, Hongjun Yu, Wentian Guo, and Qing Zhang. 2023. "Research on Path Tracking of Articulated Steering Tractor Based on Modified Model Predictive Control" Agriculture 13, no. 4: 871. https://doi.org/10.3390/agriculture13040871
APA StyleZhou, B., Su, X., Yu, H., Guo, W., & Zhang, Q. (2023). Research on Path Tracking of Articulated Steering Tractor Based on Modified Model Predictive Control. Agriculture, 13(4), 871. https://doi.org/10.3390/agriculture13040871