
Design of 4UM-120D Electric Leafy Vegetable Harvester Cutter Height off the Ground Automatic Control System Based on Incremental PID
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
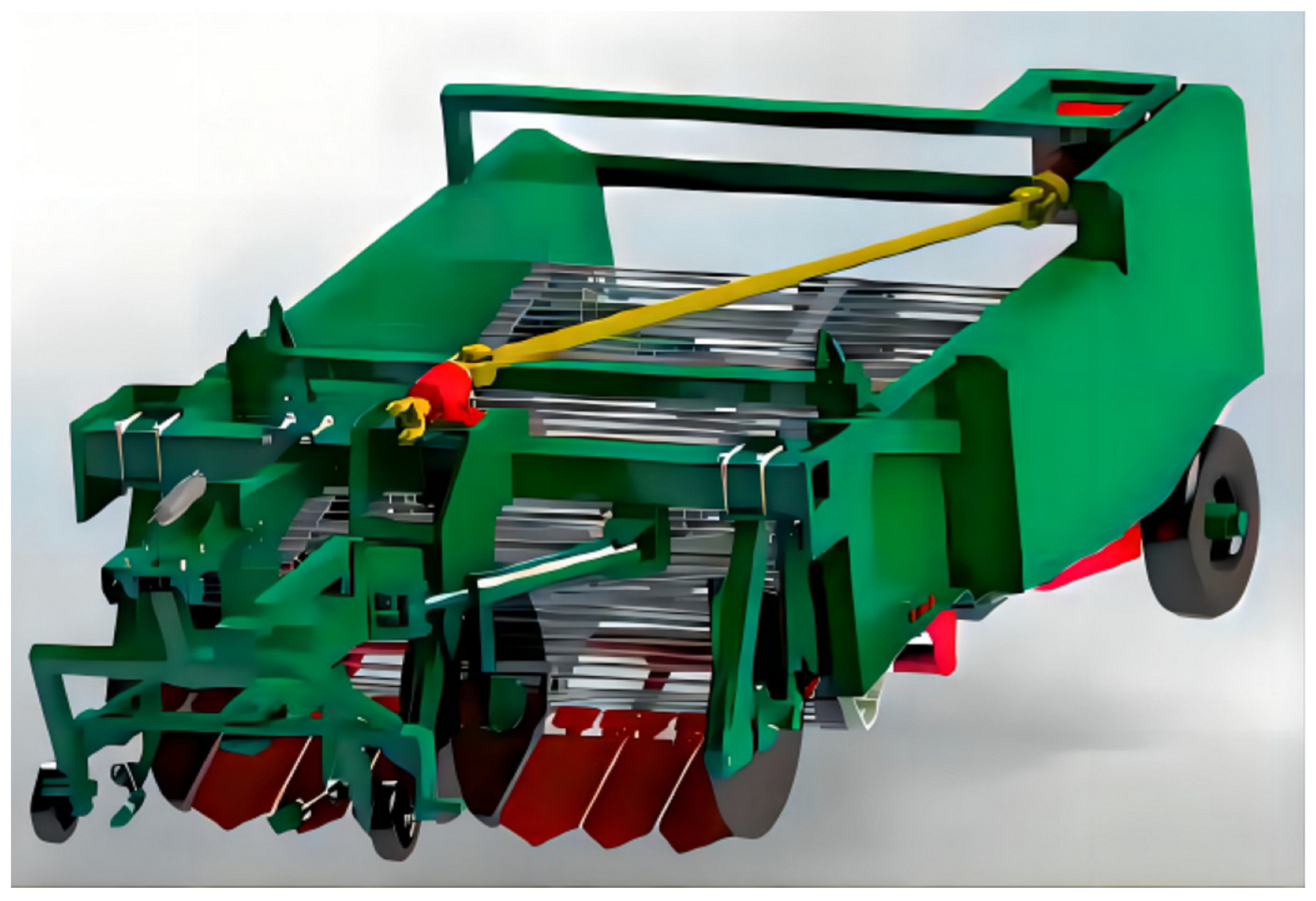
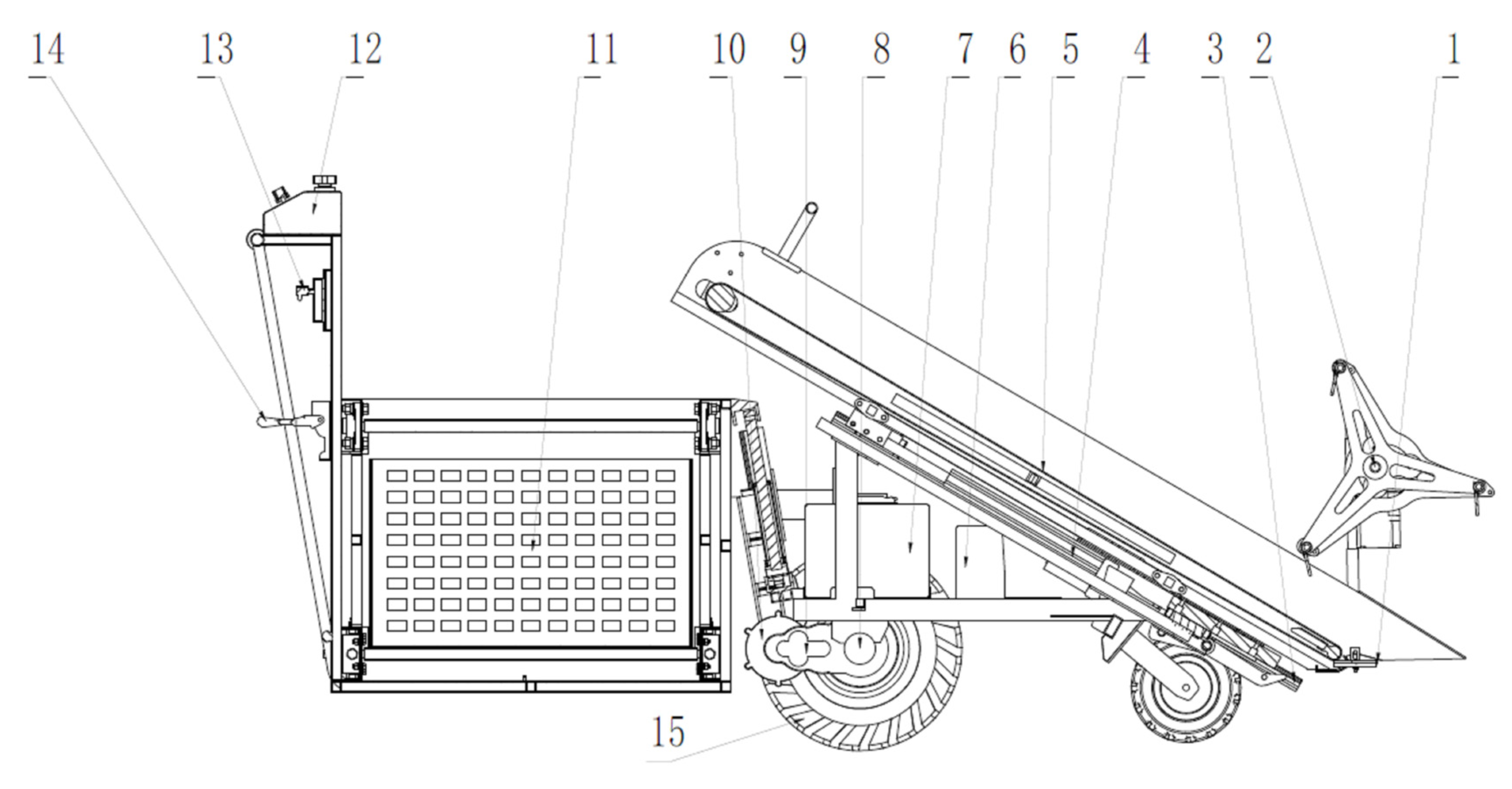
2.1. Machine Structure and Working Principle
2.1.1. Machine Structure and Technical Parameters
2.1.2. Working Principle
2.2. Composition and Control principle of an Automatic Control System for Cutter Height from the Ground
2.2.1. Composition of an Automatic Control System for Cutter Height from the Ground
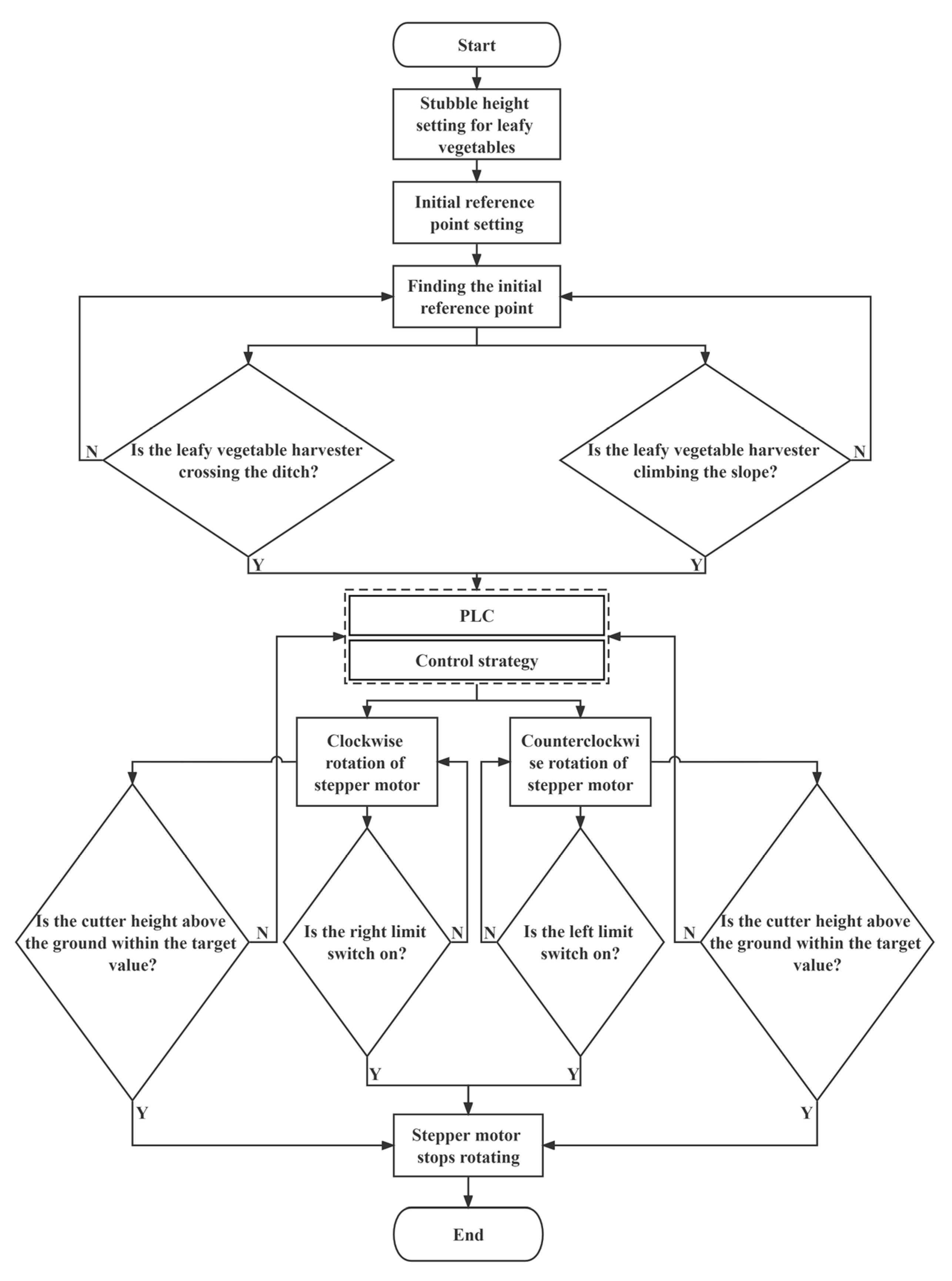
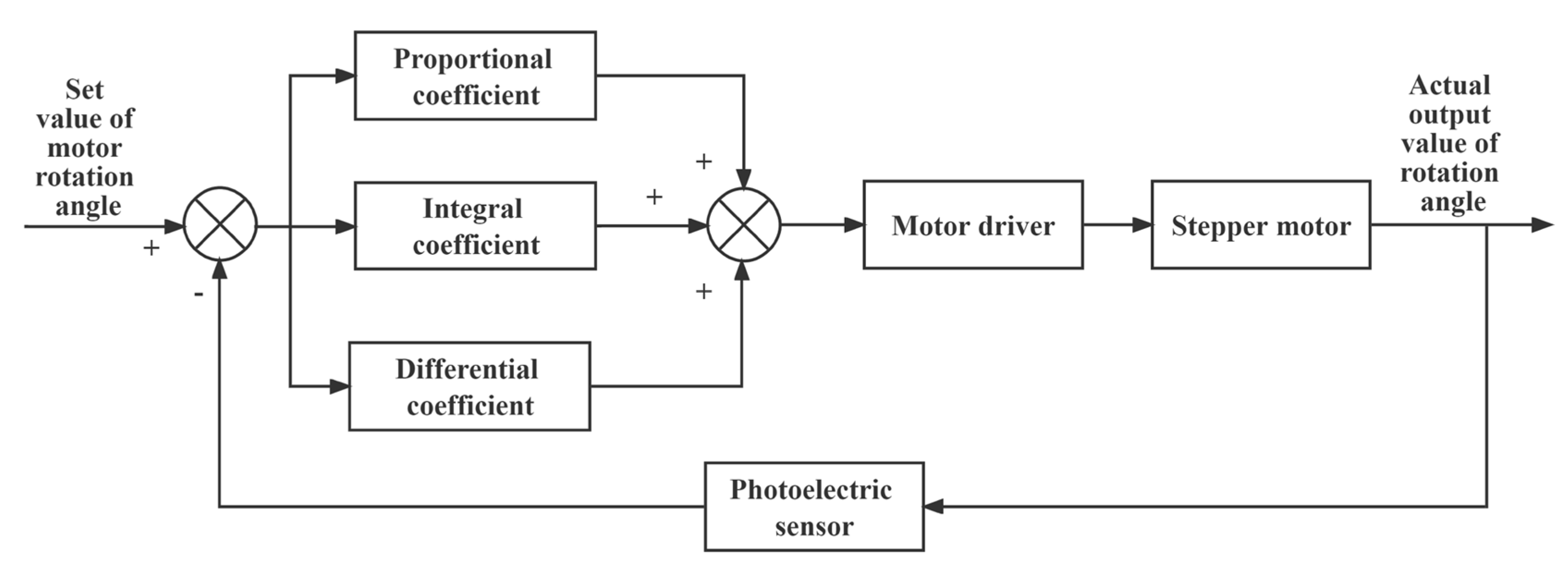
2.2.2. Control Principle
2.3. Model of Cutter Height from the Ground Adjustment System
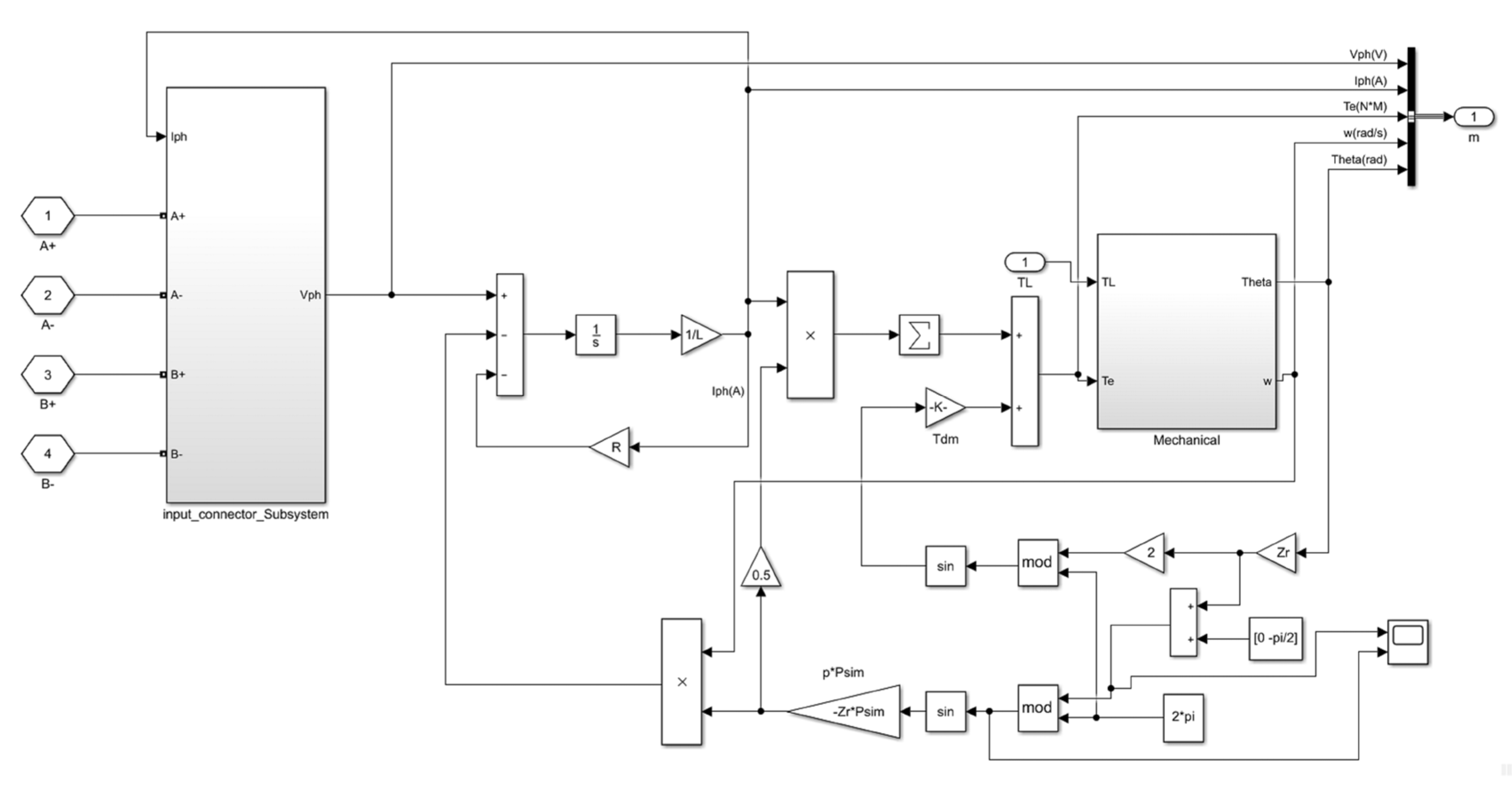
2.3.1. Cutter Height from the Ground Adjustment Motor Model
2.3.2. Drive System Model
2.4. Control Strategy Establishment
2.4.1. Analysis of Position PID Control Strategy
2.4.2. Analysis of Incremental PID Control Strategy
2.4.3. Difference between Position and Incremental PID Control
2.5. Control Model Establishment and Simulation
3. Results
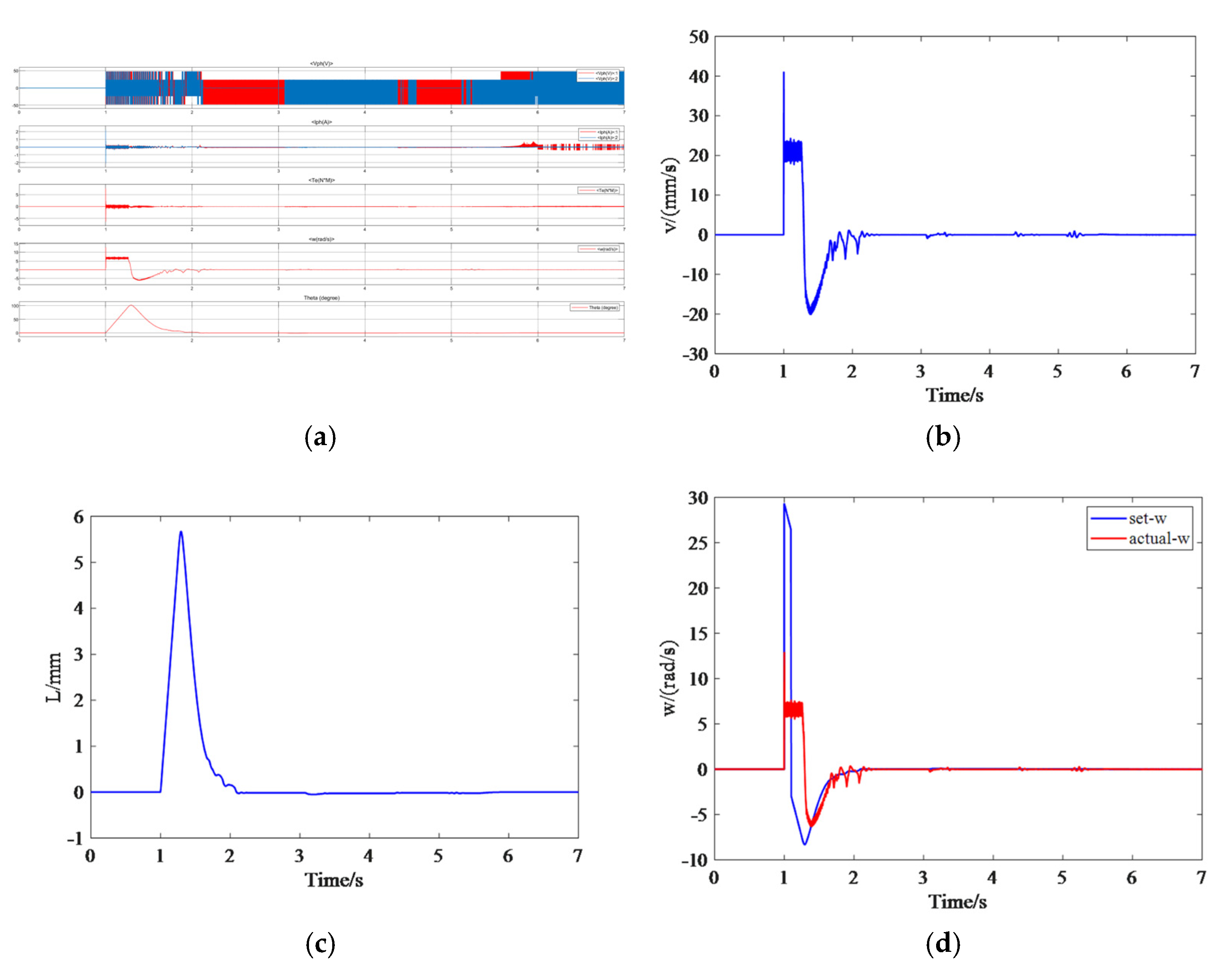
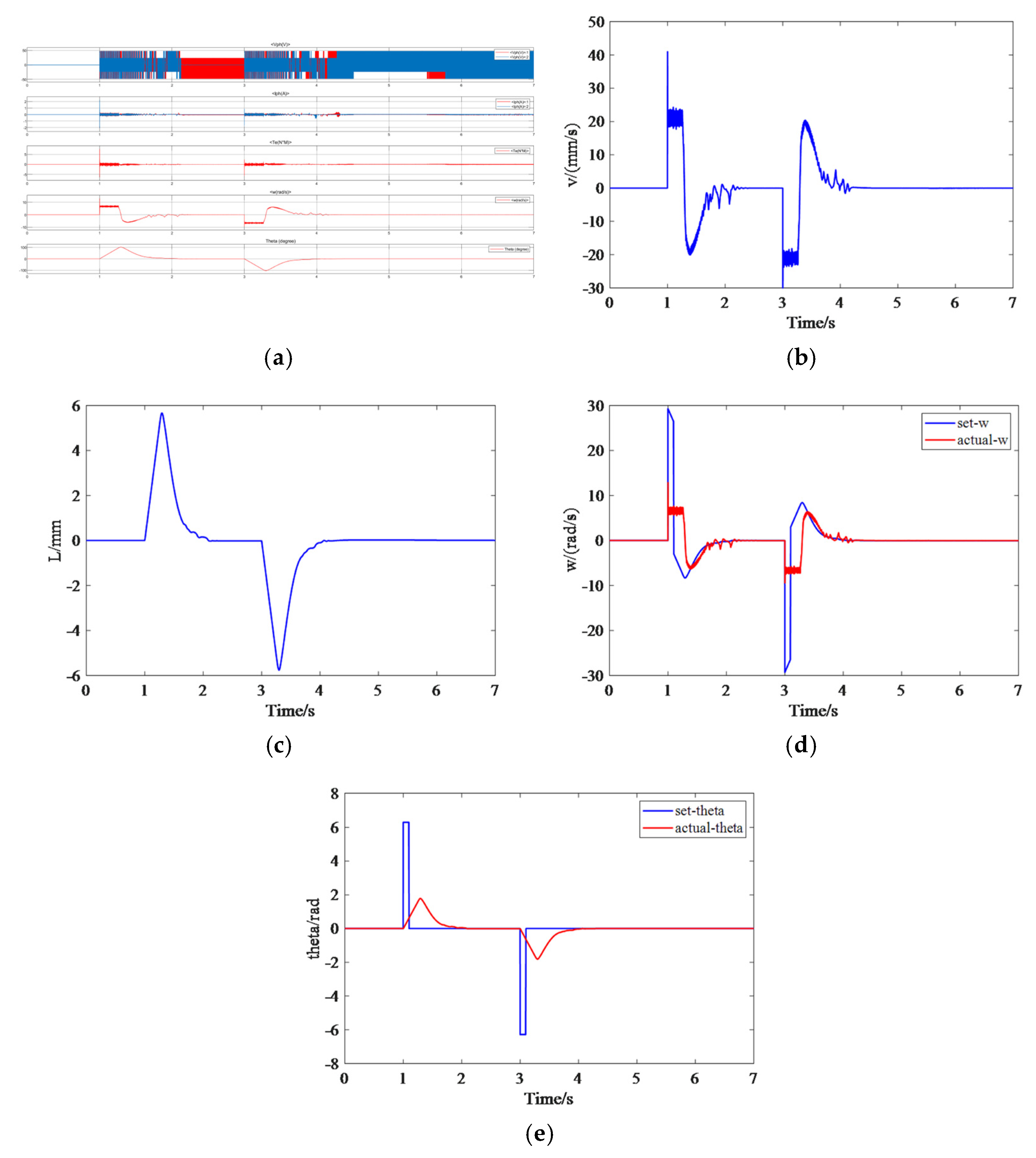
3.1. Results of the Simulation Tests
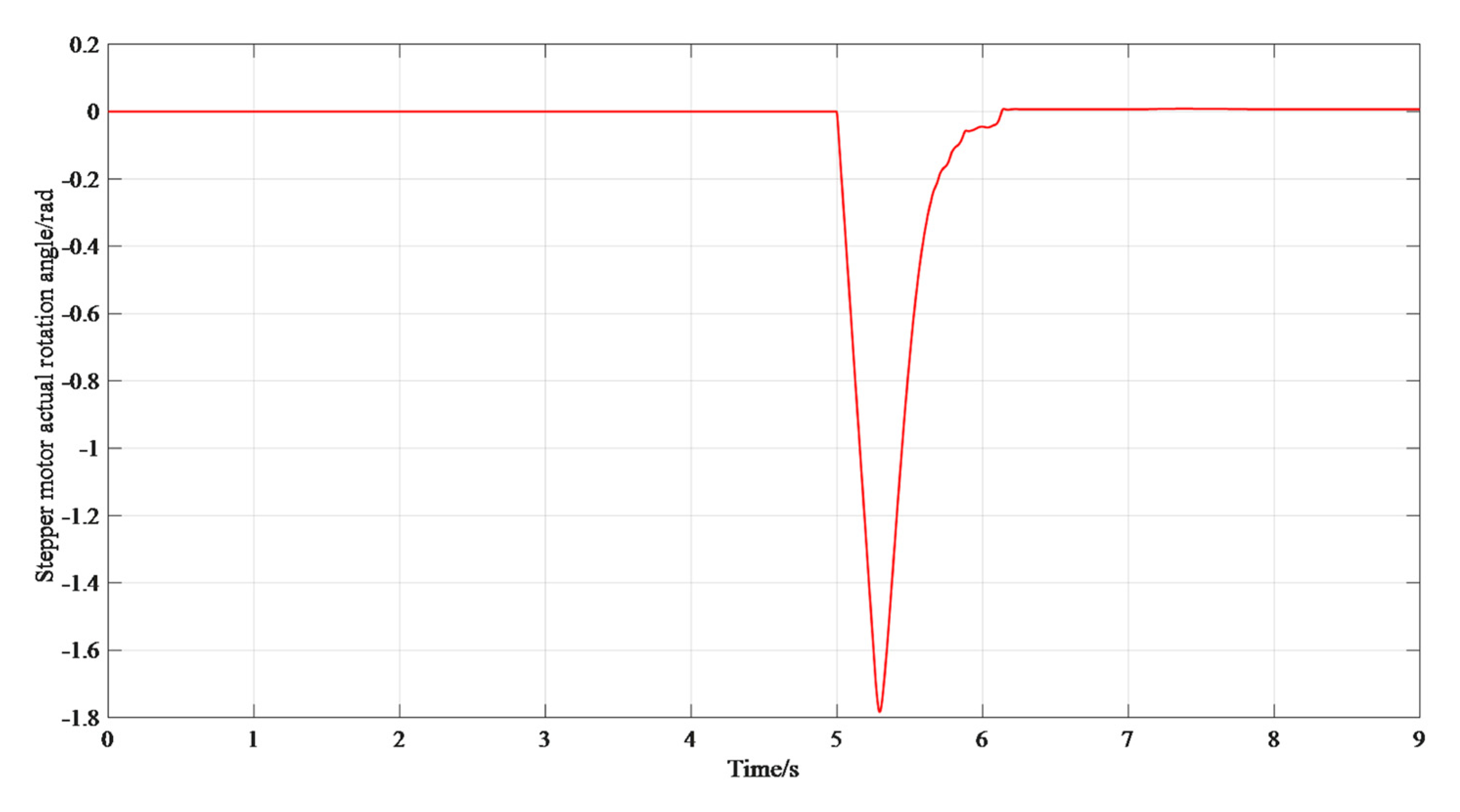
3.2. Results of Field Trials
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Jun, W.; Dongdong, D.U.; Jinbing, H.U.; JianXi, Z. Vegetable Mechanized Harvesting Technology and Its Development. Trans. Chin. Soc. Agric. Mach. 2014, 45, 81–87. [Google Scholar]
- Yue, J.; Hongru, X.; Suwei, X. Research Statue and Development Trendency on Leaf Vegetable Harvesting Technology and Equipment. J. Agric. Sci. Technol. 2018, 20, 72–78. [Google Scholar]
- Pei, T.; Xin, L.; Peiben, W. Design of power system of electric leaf vegetable harvester. J. Chin. Agric. Mech. 2019, 40, 72–76. [Google Scholar]
- Yuanjuan, G.; Yulong, F.; Chuangye, L. Research Actuality of Leek Harvester and its Developing Countermeasures. J. Agric. Mech. Res. 2018, 40, 262–268. [Google Scholar]
- Gongwei, S.; Gongpu, W.; Lianglong, H.; Jianning, Y.; Yemeng, W.; Teng, W.; Xiaodong, C. Development of harvesting mechanism for stem tips of sweet potatoes. Trans. Chin. Soc. Agric. Eng. 2019, 35, 46–55. [Google Scholar]
- Peng, M.; Zhiyu, Z.; Hanping, M. Research on Automatic Alignment Control System of Electric Leaf Vegetable Harvester. J. Agric. Mech. Res. 2022, 44, 84–89. [Google Scholar]
- Li, J.; Shang, Z.; Li, R.; Cui, B. Adaptive Sliding Mode Path Tracking Control of Unmanned Rice Transplanter. Agriculture 2022, 12, 1225. [Google Scholar] [CrossRef]
- Bai, S.; Yuan, Y.; Niu, K.; Shi, Z.; Zhou, L.; Zhao, B.; Wei, L.; Liu, L.; Zheng, Y.; An, S.; et al. Design and Experiment of a Sowing Quality Monitoring System of Cotton Precision Hill-Drop Planters. Agriculture 2022, 12, 1117. [Google Scholar] [CrossRef]
- Nang, V.N.; Yamane, S. Development of prototype harvester for head lettuce. Eng. Agric. Environ. Food 2015, 8, 18–25. [Google Scholar] [CrossRef]
- Guo, Y.; Dong, S.; Tian, S.B. Design on Control System of Seedling Vegetable Harvester Based on Single Chip. Adv. Mater. Res. 2013, 721, 656–660. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, H.; Pan, F.; Du, M.; Ji, C. Control System of a Motor-Driven Precision No-Tillage Maize Planter Based on the CANopen Protocol. Agriculture 2022, 12, 932. [Google Scholar] [CrossRef]
- Honglei, J.; Yun, L.; Jiangtao, Q. Photoelectric sensors combined with rotary encoders to detect the suction performance of suction metering devices. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2018, 34, 28–39. [Google Scholar]
- Chengqian, J.; Feiyang, G.; Jinshan, X. Optimization of working parameters of soybean combine harvester. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2019, 35, 10–22, (in Chinese with English abstract). [Google Scholar]
- Jie, H.; Jingguang, Z.; Zhizhang, Z.; Xiwen, L.; Yang, G.; Lian, H. Design and experiment of automatic operation system for rice transplanter. Trans. Chin. Soc. Agric. Mach. 2019, 50, 17–24. [Google Scholar]
- Lixin, Z.; Zenghui, Z.; Chengyi, W.; ShiChun, J.; Tong, L.; DongYun, C.; XiaoLing, D. Design of integrated monitoring system for wheat precision seeding and fertilization based on variable distance photoelectric sensor. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2018, 34, 27–34. [Google Scholar]
- Xincheng, L.; Jian, Z.; Yuliang, Y. Design and Experiment on an Intelligent Control System for Small Electric Leafy Vegetable Harvester. J. Agric. Mech. Res. 2020, 42, 83–87. [Google Scholar]
- Yuanyuan, W. Design of Greenhouse Celery Harvester; Ningxia University: Yinchuan, China, 2018. [Google Scholar]
- Tao, L.; Jin, Z.; Wenyi, X.; QingLong, L.; Hua, Z.; XiTian, Q.; Na, L.; WeiHua, L.; DaYong, G. Development of 4UGS2 type double-row sweet potato harvester. Trans. Chin. Soc. Agric. Eng. 2018, 34, 26–33. [Google Scholar]
- Long, Y. Design and MATLAB simulation of pressure control based on positional PID algorithm. Electron. Technol. Softw. Eng. 2018, 146, 27. [Google Scholar]
- Baocheng, T.; Bin, W. Incremental PID control for unmanned vehicle path tracking. J. Xi’an Univ. Technol. 2016, 36, 996–1001. [Google Scholar]
- Wenjian, X.; Yongke, L. Intelligent vehicle design based on incremental PID control algorithm. Inf. Technol. 2012, 36, 125–127. [Google Scholar]
- Yifei, Z. Simulation of Stepper Motor Control System Based on Simulink; Southwest Jiaotong University: Chengdu, China, 2014. [Google Scholar]
- Lei, W.; Donghao, L. Optimal design and simulation of acceleration and deceleration curves of stepper motors. Autom. Appl. 2021, 26, 21–24. [Google Scholar]
- Wenqiang, X.; Jianhong, Y. Derivation of transfer function model for two-phase hybrid stepper motor. Space Electron. 2011, 8, 50–53. [Google Scholar]
- Lin, Y.; Yunlong, J.; Yang, L. Modeling and simulation of short arc removal rivet system. Electr. Process. Tool. 2022, 366, 24–29. [Google Scholar]
- Zhenya, Q.; Qianqian, Q.; Liying, W. Simulation study of constant current subdivision drive control for two-phase hybrid stepper motor. Microtechnology 2022, 50, 48–52. [Google Scholar]
- Zaimang, W.; Juan, P.; Jie, H. Development of rice precision hole direct seeding machine sowing monitoring system. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2020, 36, 9–16. [Google Scholar]
- Caiyun, L.; Weiqiang, F.; Chunjiang, Z.; Hebo, M.; Zhijun, M.; Jianjun, D.; Nana, G.; Xiu, W.; Liwei, L. Design and experiment of real-time monitoring system for wheat sowing. Trans. Chin. Soc. Agric. Eng. 2017, 33, 32–40. [Google Scholar]
- Dongye, S.; Datong, Q.; Yuxing, W. Study on fuzzy control strategy of CVT system for automatic vehicles. Trans. Chin. Soc. Agric. Mach. 2001, 7–10. [Google Scholar]
- Tian, F.; Wang, X.; Yu, S.; Wang, R.; Song, Z.; Yan, Y.; Li, F.; Wang, Z.; Yu, Z. Research on Navigation Path Extraction and Obstacle Avoidance Strategy for Pusher Robot in Dairy Farm. Agriculture 2022, 12, 1008. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, X.; Zhang, H.; Shen, C.; Fu, W. Design and Performance Test of a Jujube Pruning Manipulator. Agriculture 2022, 12, 552. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Whole machine size (length × width × height)/(mm × mm × mm) | 2180 × 1500 × 1200 |
| Battery capacity/Ah | 50 |
| Working width/mm | 1200 |
| Cutter height adjustment range/mm | 0~100 |
| Conveyor belt width/mm | 1200 |
| Conveyor belt installation inclination/° | 30 |
| Wheelbase/mm | 550 |
| Wheel radius/mm | 175 |
| Minimum ground clearance/mm | 70 |
| Productivity/ | 0.04~0.08 |
| Working Condition Numbers | Names | Specific Situations |
|---|---|---|
| Working condition 1 | The harvester suddenly crossed the ditch | A narrow strip of lower ground was in front of the harvester, which led the sensor to believe that the cutter was too high, and therefore should be lowered. |
| Working condition 2 | The harvester suddenly climbed the slope | A narrow strip of higher ground was in front of the harvester, which led the sensor to believe that the cutter was too low, and therefore that it should rise. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Hu, L.; Wang, G.; Yuan, J.; Bao, G.; Shen, H.; Wu, W.; Yin, Z. Design of 4UM-120D Electric Leafy Vegetable Harvester Cutter Height off the Ground Automatic Control System Based on Incremental PID. Agriculture 2023, 13, 905. https://doi.org/10.3390/agriculture13040905
Chen W, Hu L, Wang G, Yuan J, Bao G, Shen H, Wu W, Yin Z. Design of 4UM-120D Electric Leafy Vegetable Harvester Cutter Height off the Ground Automatic Control System Based on Incremental PID. Agriculture. 2023; 13(4):905. https://doi.org/10.3390/agriculture13040905
Chicago/Turabian StyleChen, Wenming, Lianglong Hu, Gongpu Wang, Jianning Yuan, Guocheng Bao, Haiyang Shen, Wen Wu, and Zicheng Yin. 2023. "Design of 4UM-120D Electric Leafy Vegetable Harvester Cutter Height off the Ground Automatic Control System Based on Incremental PID" Agriculture 13, no. 4: 905. https://doi.org/10.3390/agriculture13040905
APA StyleChen, W., Hu, L., Wang, G., Yuan, J., Bao, G., Shen, H., Wu, W., & Yin, Z. (2023). Design of 4UM-120D Electric Leafy Vegetable Harvester Cutter Height off the Ground Automatic Control System Based on Incremental PID. Agriculture, 13(4), 905. https://doi.org/10.3390/agriculture13040905