1. Introduction
Tractors are mainly off-road vehicles that are used to conduct agricultural operations such as plow tillage [
1], rotary tillage [
2], baler operation [
3], transportation with a trailer [
4], construction works with a loader [
5], and so on. For these operations, it is important to operate tractors efficiently.
A tractor’s performance includes appropriate power delivery and low fuel consumption. Power delivery depends on the working loads [
6]. It was observed that approximately 84% of engine-rated power was consumed during rotary tillage, and that minimal power was consumed during loader operation. Lee et al. [
7] investigated the ballast, tire inflation pressure, transmission gear, engine speed, and workload as control variables of fuel efficiency. They developed a linear regression model that could estimate fuel efficiency. Lee et al. [
8] developed an engine throttle control system, which was a load-sensitive control system for a tractor. In their control system, the proportional–integral (PI) was applied to maximize the fuel efficiency of the tractor during plow tillage.
Globally, scholars have attempted to determine parameters that can reduce the fuel consumption of tractors during agricultural operations. Mileusnić et al. [
9] conducted various field operations to compare the fuel consumption of tractors, but the performance of these tractors was not analyzed based on the working load. Moinfar et al. [
10] analyzed the rolling resistance, slip ratio, tractive efficiency, and fuel consumption considering the driving system, ballast weight, and tire pressure. In their study, the factors investigated could improve a tractor’s performance. They stated that the ballast weight, tire inflation pressure, and type of driving system were the most significant factors. Additionally, the highest traction efficiency was obtained for a 4WD system, as the working width was increased. Finally, they suggested that the 4WD system was better than other driving systems when considering traction efficiency and minimal fuel consumption. Shafaei et al. [
11] stated that tillage depth is more highly prioritized than speed for power delivery efficiency, because tillage depth indicates the working load. Greater tillage depth occurred with greater working loads. In their study, an automatic slip control system that would be effective at a slip lower than 0.2 was developed while considering the tractive efficiency. Finally, they highlighted that the slip efficiency, as well as the overall power efficiency, highly depended on tillage depth rather than speed. Han et al. [
12] developed a cooperative control method that considered engine load and tillage depth to overcome the traditional draft position. They mentioned that this control method aimed to provide high power and low fuel consumption based on tillage depth, because they believed that tillage depth represented the working loads. The control method developed in their study ensured the tillage quality and ideal engine power. In addition, Kim et al. [
13] reported that tillage depth had a wide range of effects on the working load of a tractor. They conducted plow tillage in various soil layers and predicted the soil–tool interactions. Kim et al. [
14] conducted plow tillage to analyze power transmission efficiency based on the tillage depth of a 42 kW tractor. They also reported that the overall power requirement was significantly increased due to the working load.
Furthermore, Zhang et al. [
15] proposed a joint control method for reducing the energy consumption of an electric tractor during plow tillage. In their study, low traction efficiency and significant energy consumption due to the excessive wheel slip were addressed. They also reported that the drive torque distribution was one of the most crucial factors for higher energy consumption. Finally, they suggested that the slip, traction efficiency, and energy consumption were the best in torque distribution mode. However, the energy consumption was analyzed as the target tractor was an electric tractor. In research conducted on hybrid tractors to save energy, an energy-saving control strategy based on instantaneous optimization was proposed, focusing on minimizing the fuel consumption of the hybrid tractor in plowing and rotary tillage. It was found that the fuel consumption for plowing and rotary tillage decreased by approximately 6.31% and 4.70%, respectively [
16,
17].
Apart from what was described above, the working load is the most important parameter for predicting the fuel consumption, performance, and the power delivery efficiency of a tractor. However, engine modes were not used to predict the tractors’ performance. The engine mode operates as the engine is loaded. Siddique et al. [
18] estimated fuel consumption based on the engine load levels by using a PTO (power take-off) dynamometer test and developed the simulation model using AMESim software (version 16, SIEMENS AG, Munich, Germany); the correlations were statistically analyzed and compared with those in the previous literature. Siddique et al. [
19] also stated that tractor fuel consumption highly depends on the load that occurs during agricultural operations and the gear stages used for the operations. In their study, fuel consumption was analyzed in both a simulation model and an experimental field test, and the results were statistically correlated. However, power delivery efficiencies were not analyzed during rotary tillage operations based on engine modes.
Therefore, this study focused on analyzing power delivery efficiencies in various engine modes. The tractive efficiencies of all engine modes were compared; finally, the most effective energy-saving engine mode for use during rotary tillage was selected. The specific objectives were as follows:
- (i)
To conduct rotary tillage operation in various engine modes.
- (ii)
To analyze power delivery efficiencies.
- (iii)
To compare tractive performances using the Brixius method [
20].
- (iv)
To suggest an energy-saving engine mode for use during rotary tillage.
4. Discussion
In this study, rotary tillage was used to analyze the power delivery efficiency and fuel consumption of a tractor based on its engine modes. The results of this study are discussed below.
- (i)
It was observed that the maximum engine power, which was around 84.76 kW, was consumed in the APS power mode, and the minimum required engine power was 63.17 kW in the conventional mode during rotary tillage. In the case of the axle power, the highest and lowest axle power was consumed in the APS ECO and conventional modes, accounting for 53.45 and 31.74 kW, respectively. This indicated that the conventional, APS ECO, and APS power modes, respectively, delivered around 31.43, 72.55, and 53.43% of the engine power to both axles. After analyzing the PTO power, it was observed that the maximum and minimum PTO power was 39.48 and 20.24 kW in the APS power and APS ECO modes. This meant that approximately 49.75, 27.47, and 46.56% of the engine power was consumed as PTO power in the conventional, APS ECO, and APS power modes, respectively. Hensh et al. [
27] reported that the PTO power consumption was in the range of 20.11% to 71.77% for a depth increase of 50 mm to 150 mm. Upadhyay and Raheman [
28] also stated that the PTO power consumption was in the range of 26.90% to 63.74% for an average working depth of 120 mm. These studies agreed that the APS ECO mode consumed sufficient PTO power for rotary tillage.
- (ii)
It was also observed that the PDE in the APS power mode was the highest, accounting for around 89.23%, and the lowest PDE was around 66.48% in the conventional mode. However, the PDE in the APS ECO mode was around 77.57% of the rated engine power. Kim et al. [
6] stated that the PDE of a 78 kW tractor was around 84.1% of the rated engine power for rotary tillage. Lee [
29] also stated that the maximum PDE of a 30 kW tractor was approximately 85% of the rated engine power during rotary tillage. According to the PDE, the APS power mode was the best engine mode for rotary tillage. To select the most economical engine mode in terms of fuel, the fuel consumption must be analyzed.
- (iii)
In the case of fuel consumption, the conventional mode had the lowest fuel consumption, and the APS power mode consumed the most fuel. The fuel consumption in the APS ECO mode was 19.39 L/h. Siddique et al. [
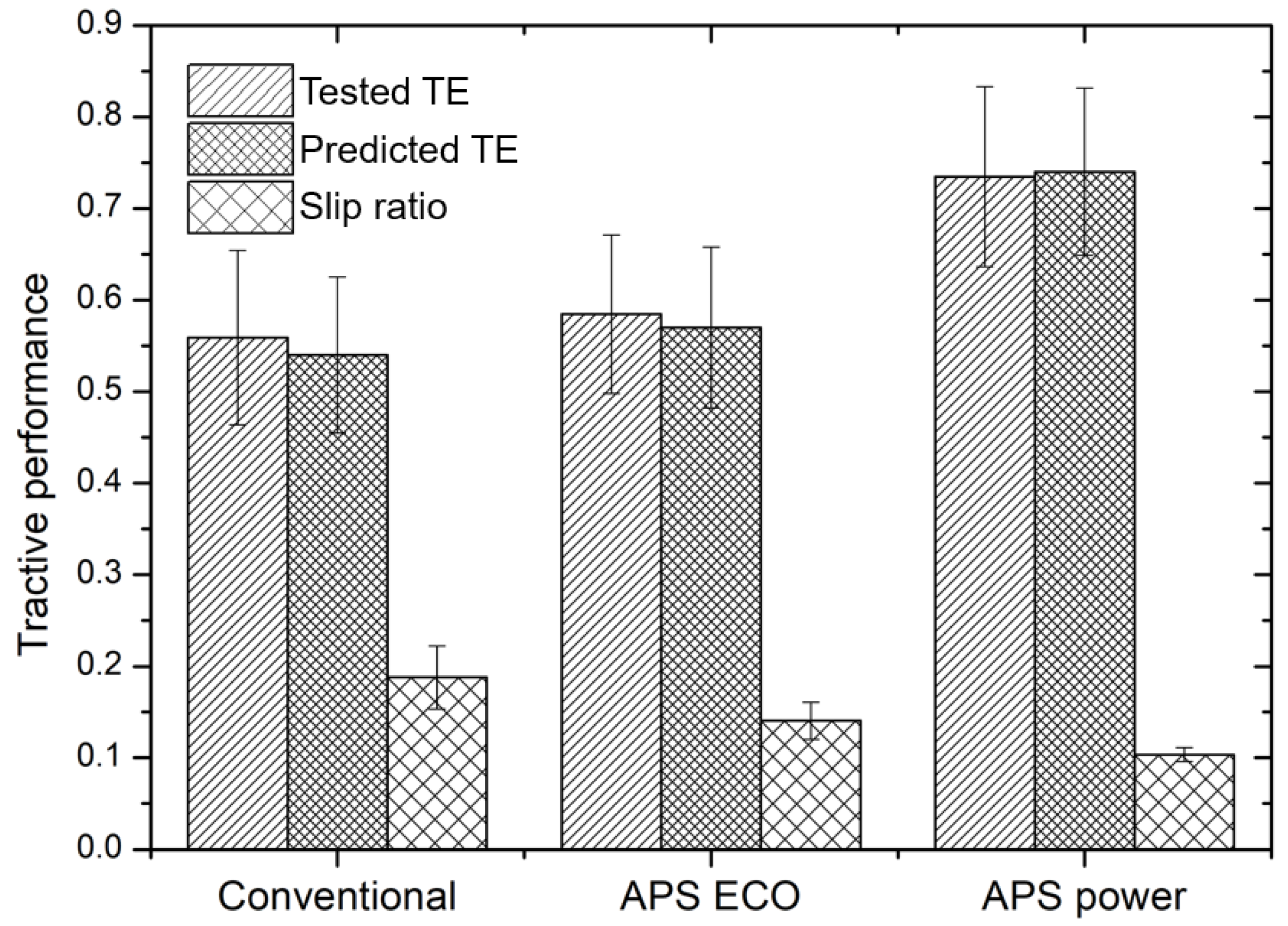
19] conducted similar research and stated that the APS ECO mode was the most economical engine mode comparison with the conventional and APS power modes; it was around 42.35% more economical in terms of fuel than the conventional mode. However, it was observed that the conventional mode consumed the least fuel during rotary tillage. In addition, a comparison of the tested and predicted tractive efficiencies showed that they were almost similar. The statistical analysis showed that there were no significant differences between the tested and predicted tractive efficiencies in each engine mode. In the conventional mode, the slip ratio was higher than those in the APS ECO and APS power modes, accounting for 18.80%. Therefore, a comparative analysis was conducted based on the working load in rotary tillage.
- (iv)
The comparative analysis showed that the working load in the APS ECO mode was located in the ungoverned region. In addition, it showed that the working load was close to the maximum engine torque. This indicated that the APS ECO mode could be used to perform rotary tillage with high loads that could suddenly occur during operation [
8,
18]. In addition, the slip ratio in the APS ECO mode was around 14.04% for rotary tillage, which was lower than that in the conventional mode. Zhang et al. [
15] suggested that power loss could occur with a higher slip ratio [
24,
30].
On the other hand, the conventional and APS power modes were located in the governed region, where the working load was comparatively low and the fuel consumption was higher. On the map of engine characteristics, the governed region is outside of the engine operating range, where the fuel efficiency rapidly decreases [
8]. Lee [
31] conducted research on maximizing the fuel efficiency of agricultural tractors. He suggested that the ungoverned region is the safest and most suitable region of the engine characteristic map for conducting agricultural operations because the engine’s operating range is from the points of maximum torque to the points of maximum power of the engine [
32]. In addition, this could allow unexpected engine turn-off due to fluctuations in the working load, which are to be avoided.
In conclusion, the conventional and APS power modes would not be suitable or efficient for rotary tillage due to their being in the governed region and due to the fluctuation in agricultural working loads. For this reason, it could be said that the APS ECO mode is the most suitable and efficient engine mode for the working loads that are in the engine’s operating range. Therefore, we would suggest that users perform rotary tillage using the APS ECO mode efficiently.
5. Conclusions
In this study, the power delivery efficiency and fuel consumption of a 95 kW tractor were analyzed based on the conventional, APS ECO, and APS power engine modes. An APS (auto power shift) controller was used to select the engine modes. Finally, an energy-saving and efficient engine mode was selected for rotary tillage based on a comparative analysis. The power delivery and tractive efficiency in the APS power mode were the highest, but the fuel consumption was also the highest compared to that in the other engine modes. The slip ratio in the APS power mode was around 10%. In addition, a comparison of the tested and predicted tractive efficiencies showed that there were no significant differences for each engine mode. This indicated that the APS control algorithm was accurately performed.
In the case of the conventional mode, both the power delivery and tractive efficiencies were the lowest, as was the fuel consumption. However, the slip ratio in the conventional engine mode was rather high. On the other hand, the PDE and TE in the APS ECO mode were moderate, as was the fuel consumption, whereas the slip ratio was below 15%. The comparative analysis showed that the APS ECO mode was in the engine’s operating range, and the highest engine torque was possible in comparison with the APS power and conventional modes. In addition, the fuel consumption was comparatively lower than that in the APS power mode. However, the conventional and APS power modes were in the governed region, where that the engine could suddenly be turned off due to fluctuations in the working load. For this reason, we can say that APS ECO mode could be the most suitable, efficient, and energy-saving engine mode for rotary tillage. Finally, we recommend that rotary tillage is conducted by efficiently using the APS ECO mode.




 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}