
Optimization of Shifting Quality for Hydrostatic Power-Split Transmission with Single Standard Planetary Gear Set

Abstract
:1. Introduction
2. Materials and Methods
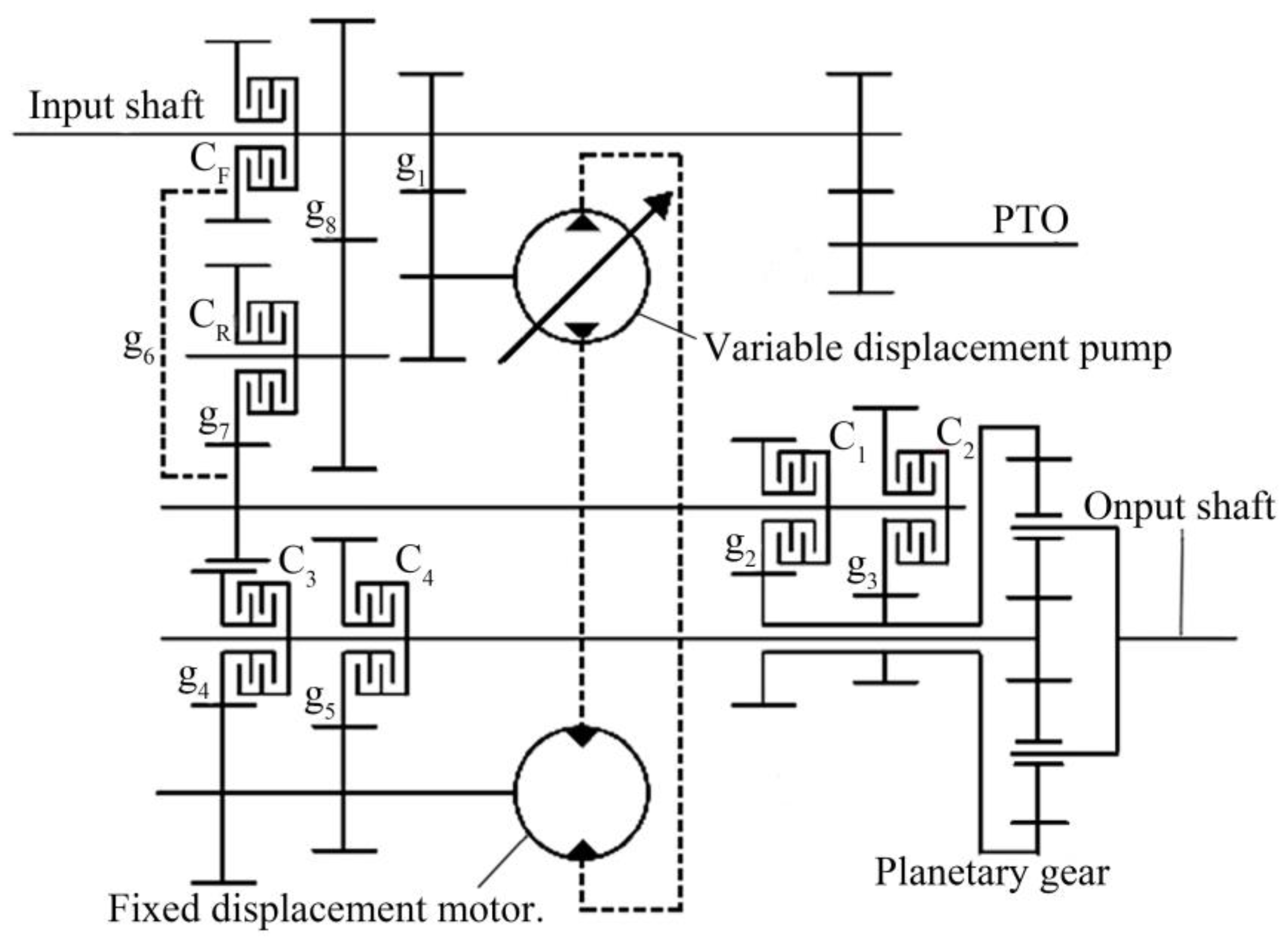
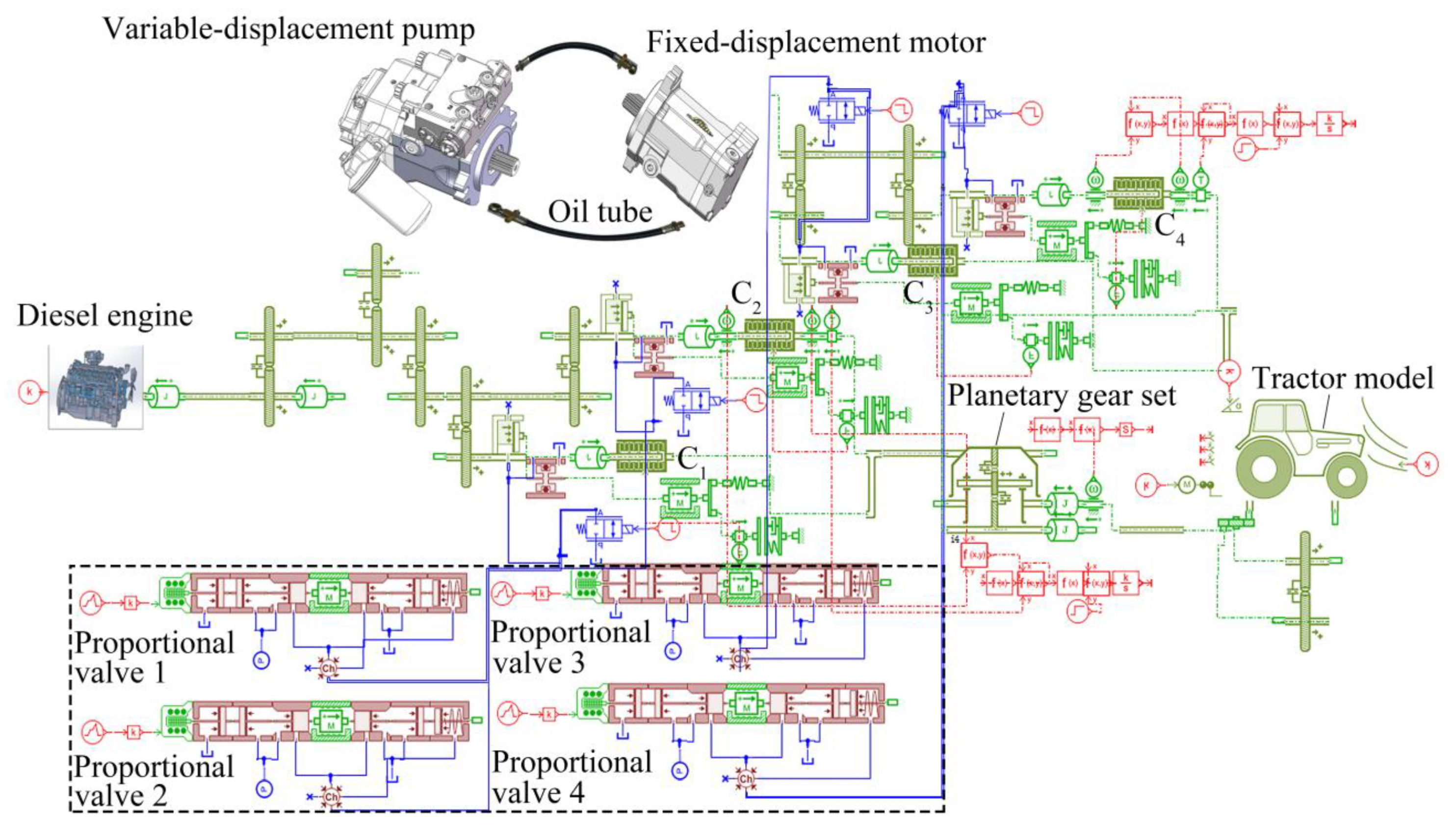
2.1. Powertrain
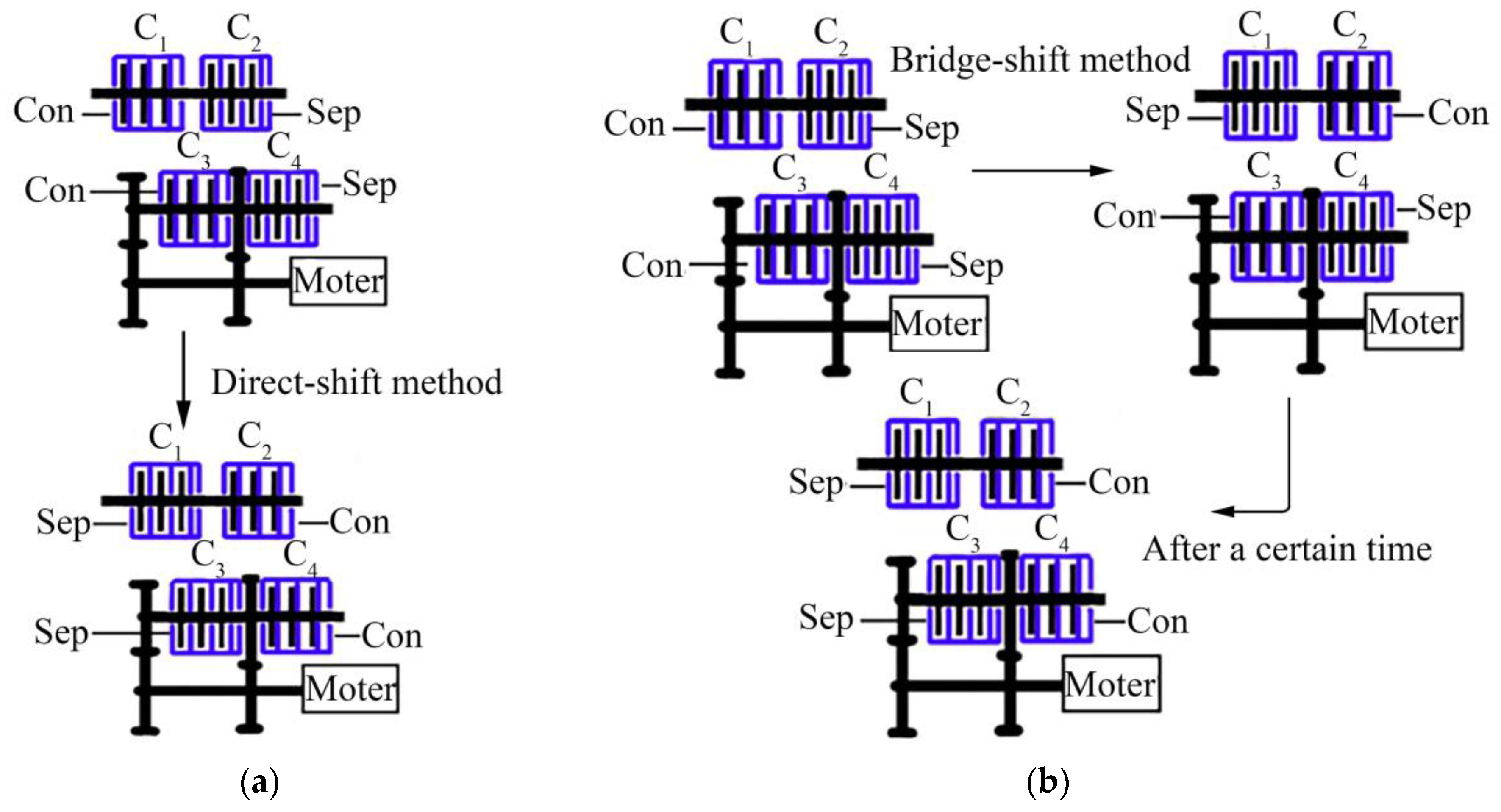
2.2. Control Strategies
2.3. Modeling of the Swash Plate Axial Piston Units
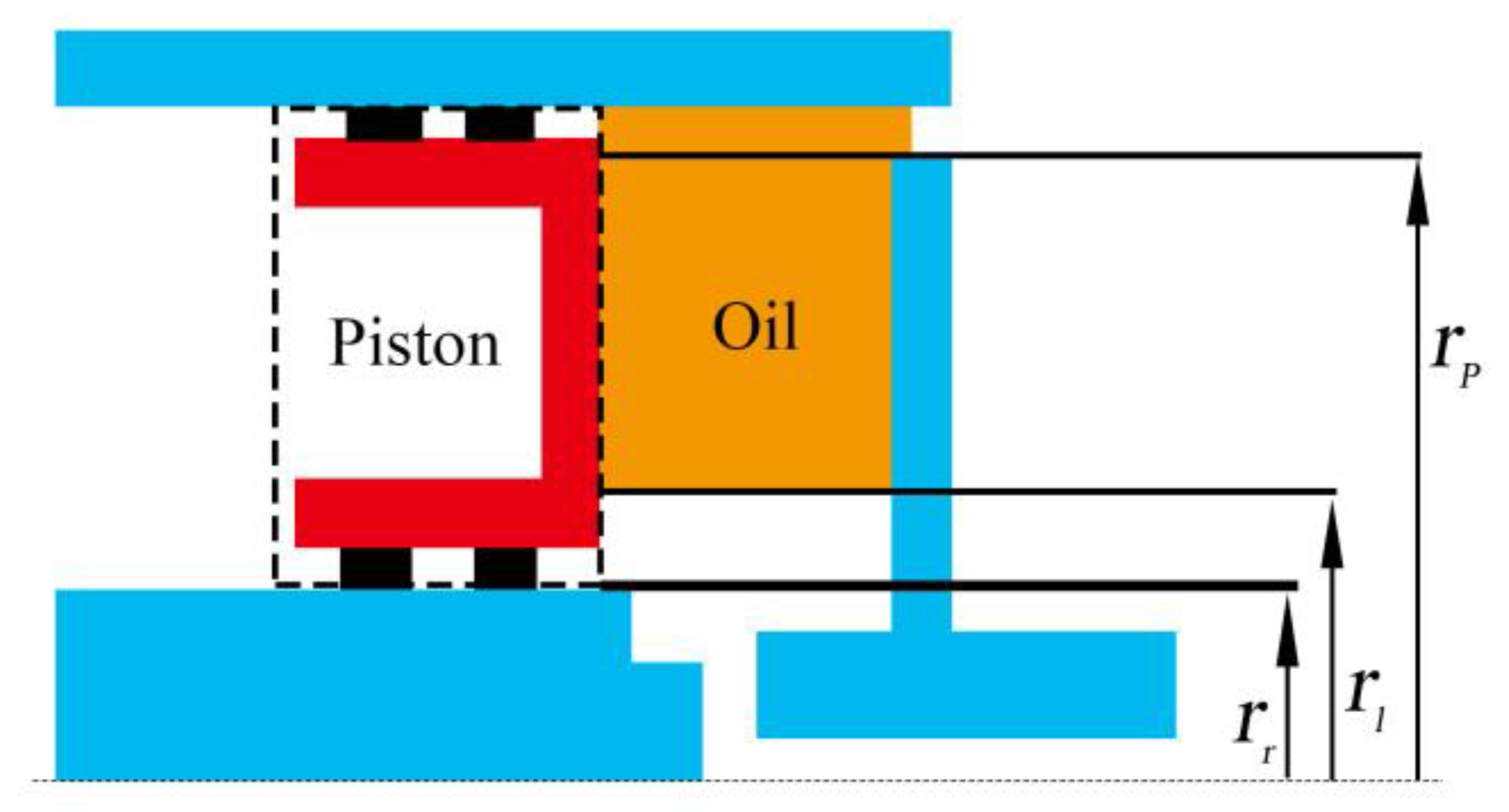
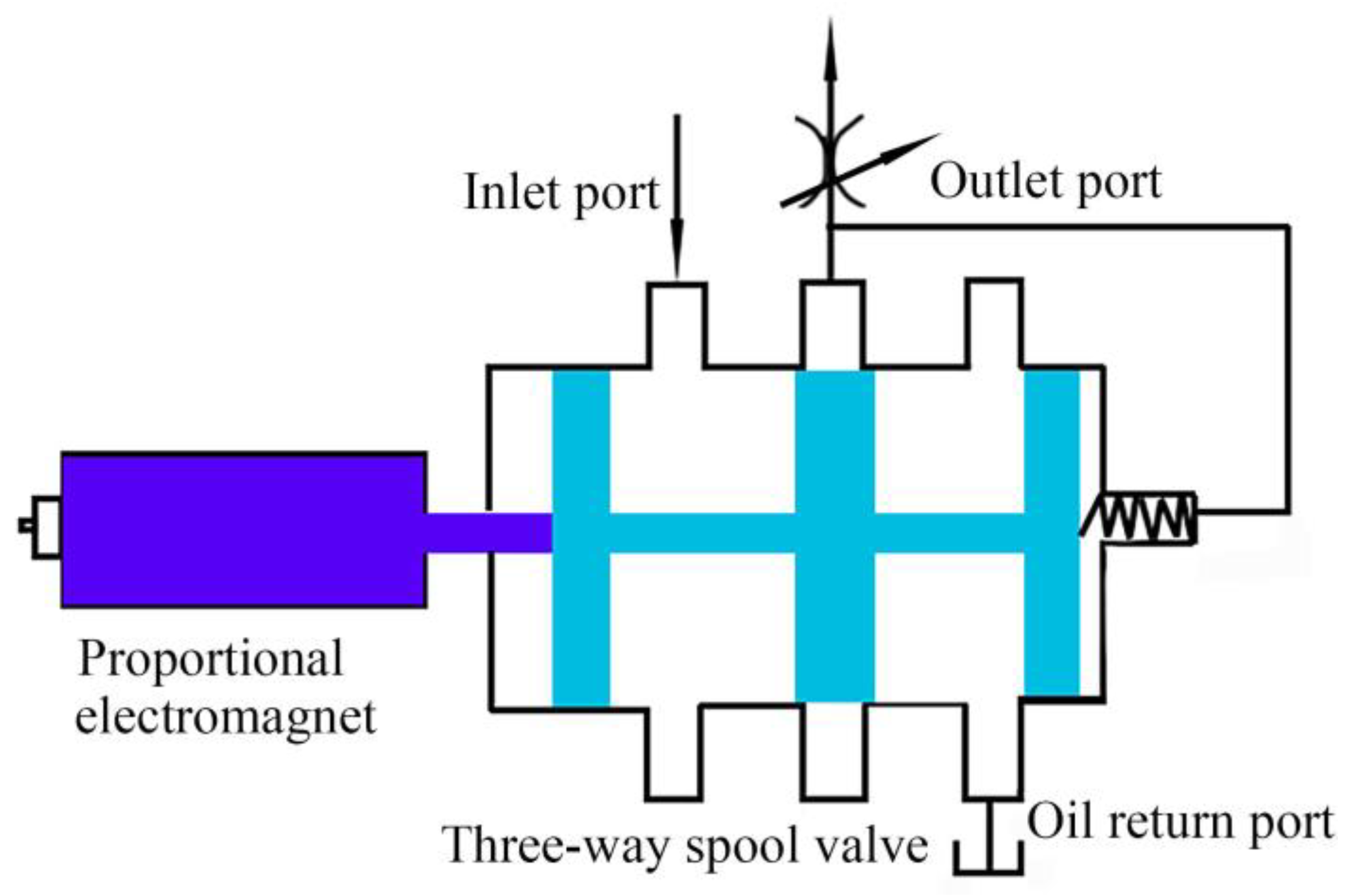
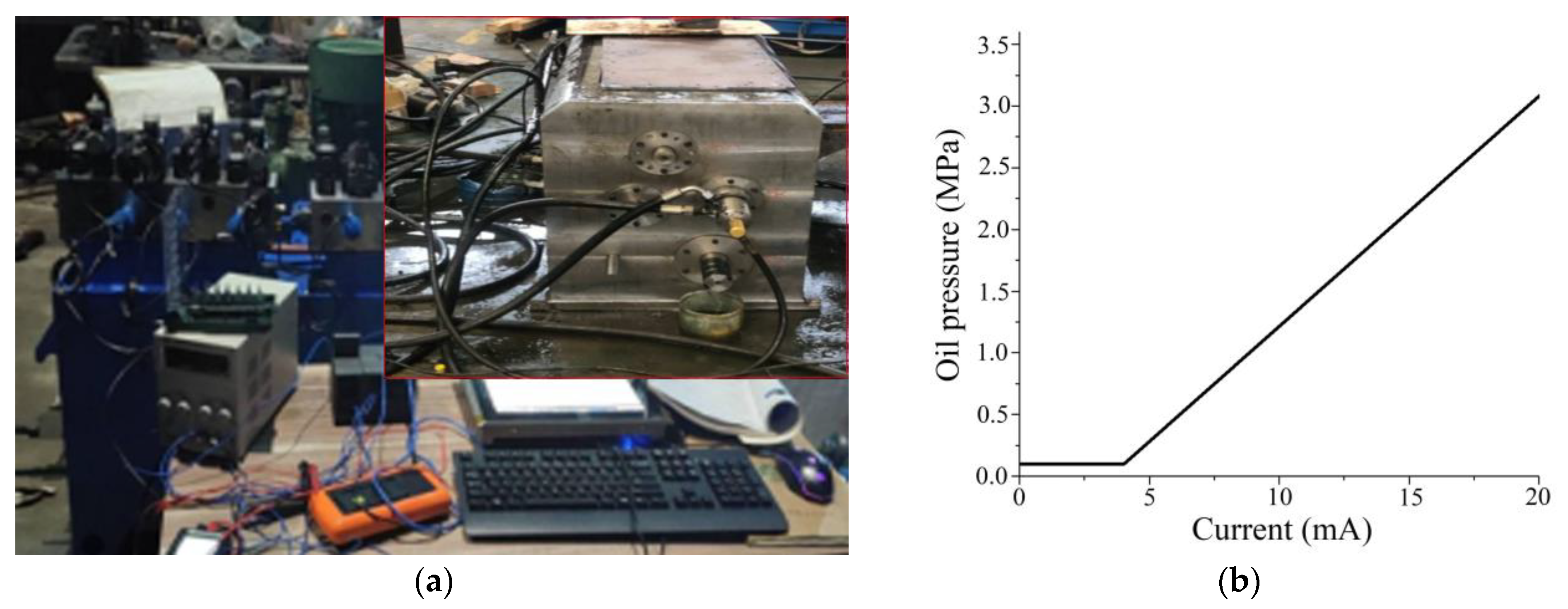
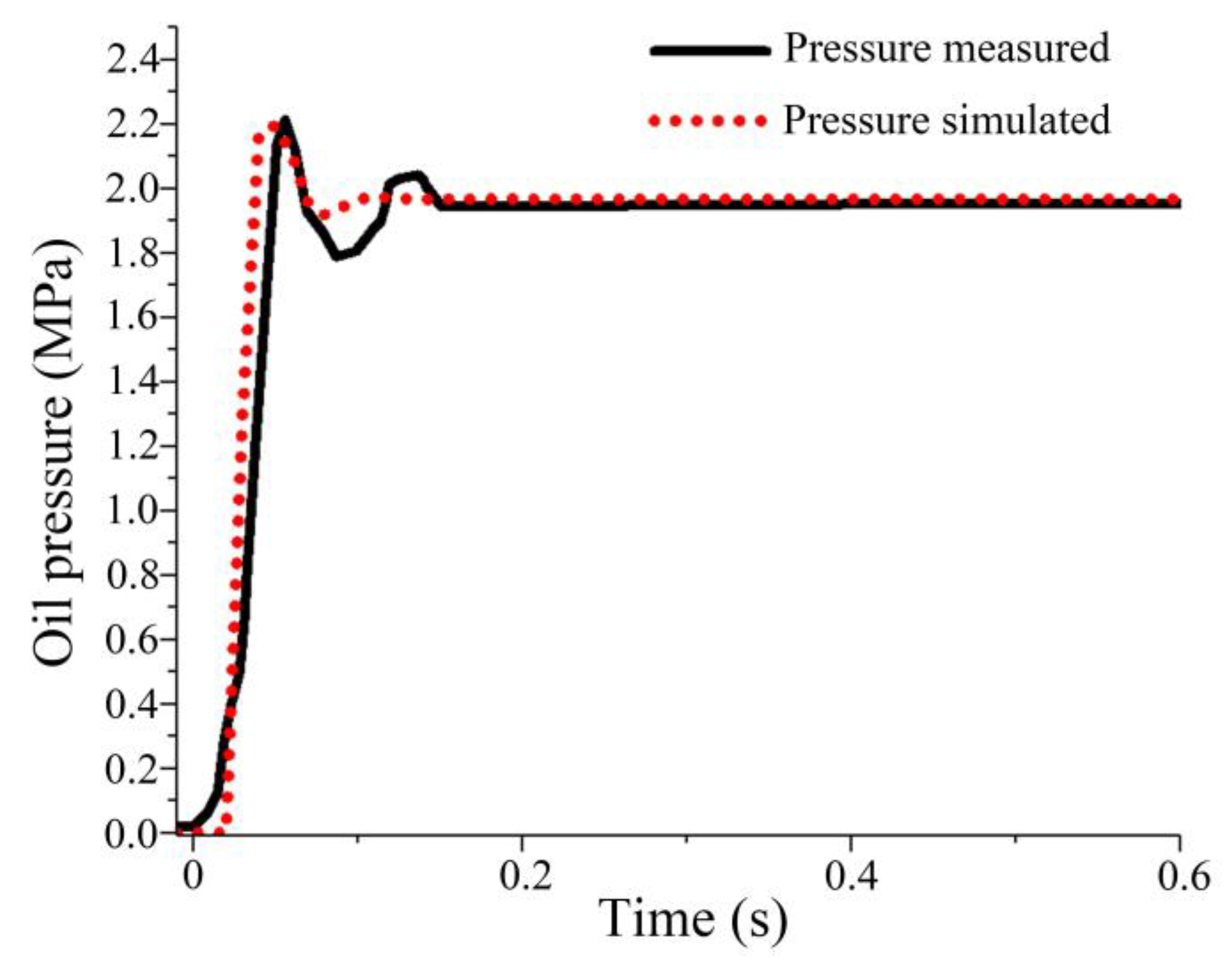
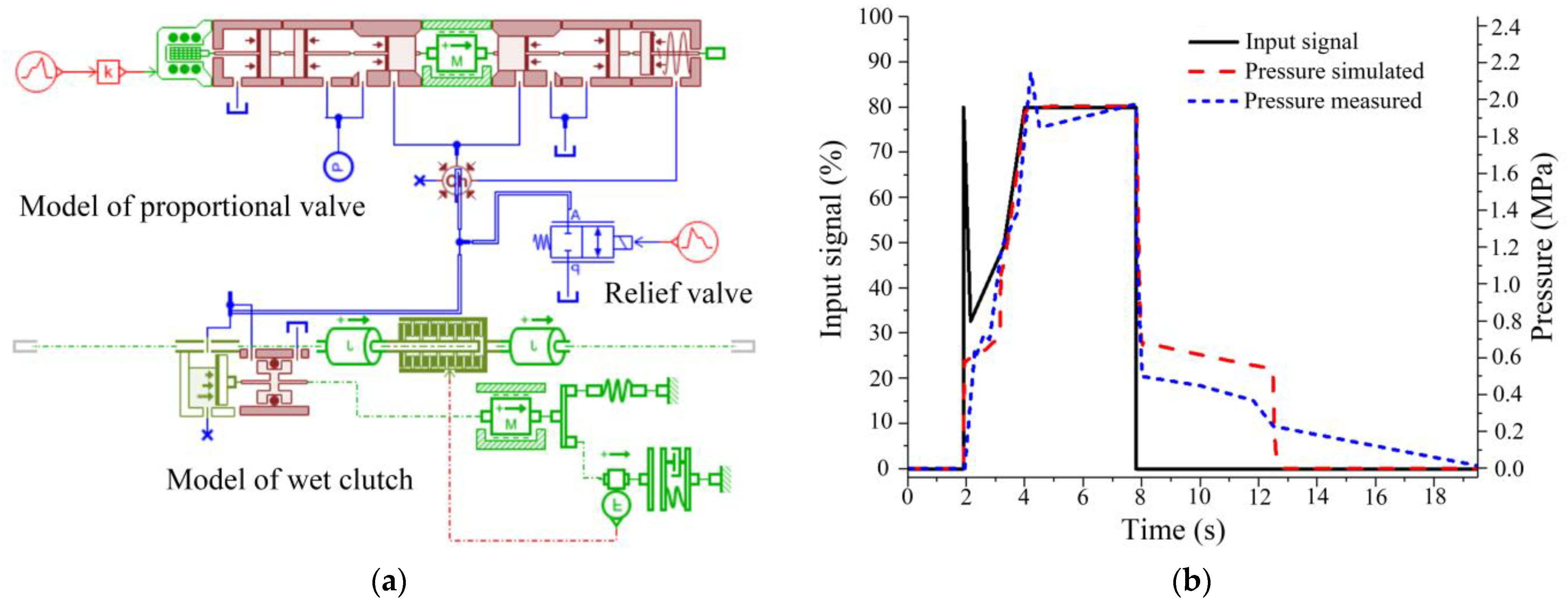
2.4. Modeling of the Power-Shift System
2.5. Modeling of Gears and Shafts
2.6. Modeling of Tractor
3. Results and Discussion
3.1. Evaluation Indicators
3.2. Direct-Shift Method
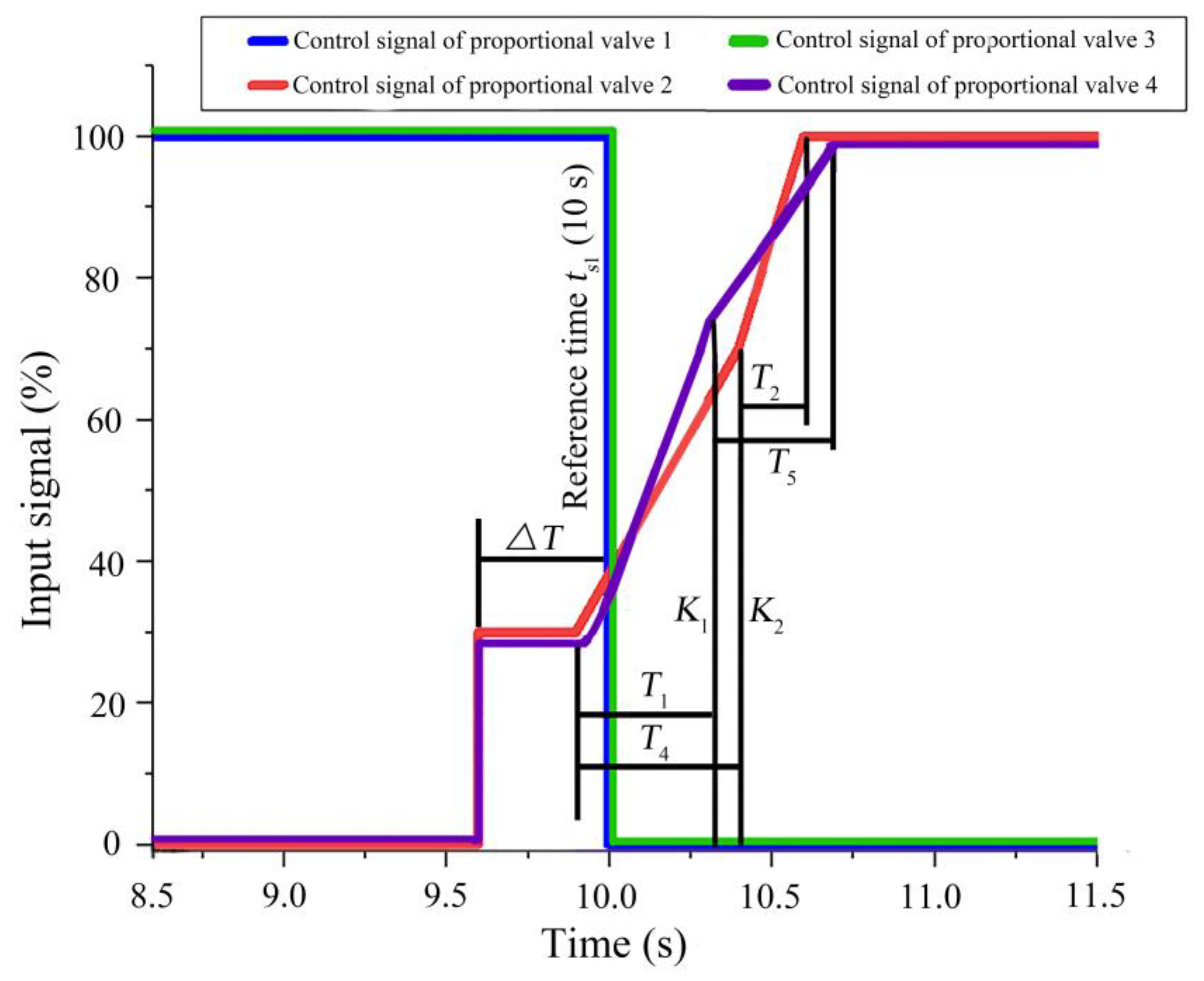
3.2.1. Determination of Shift Points
3.2.2. Optimization of Shifting Quality
3.3. Bridge-Shift Method
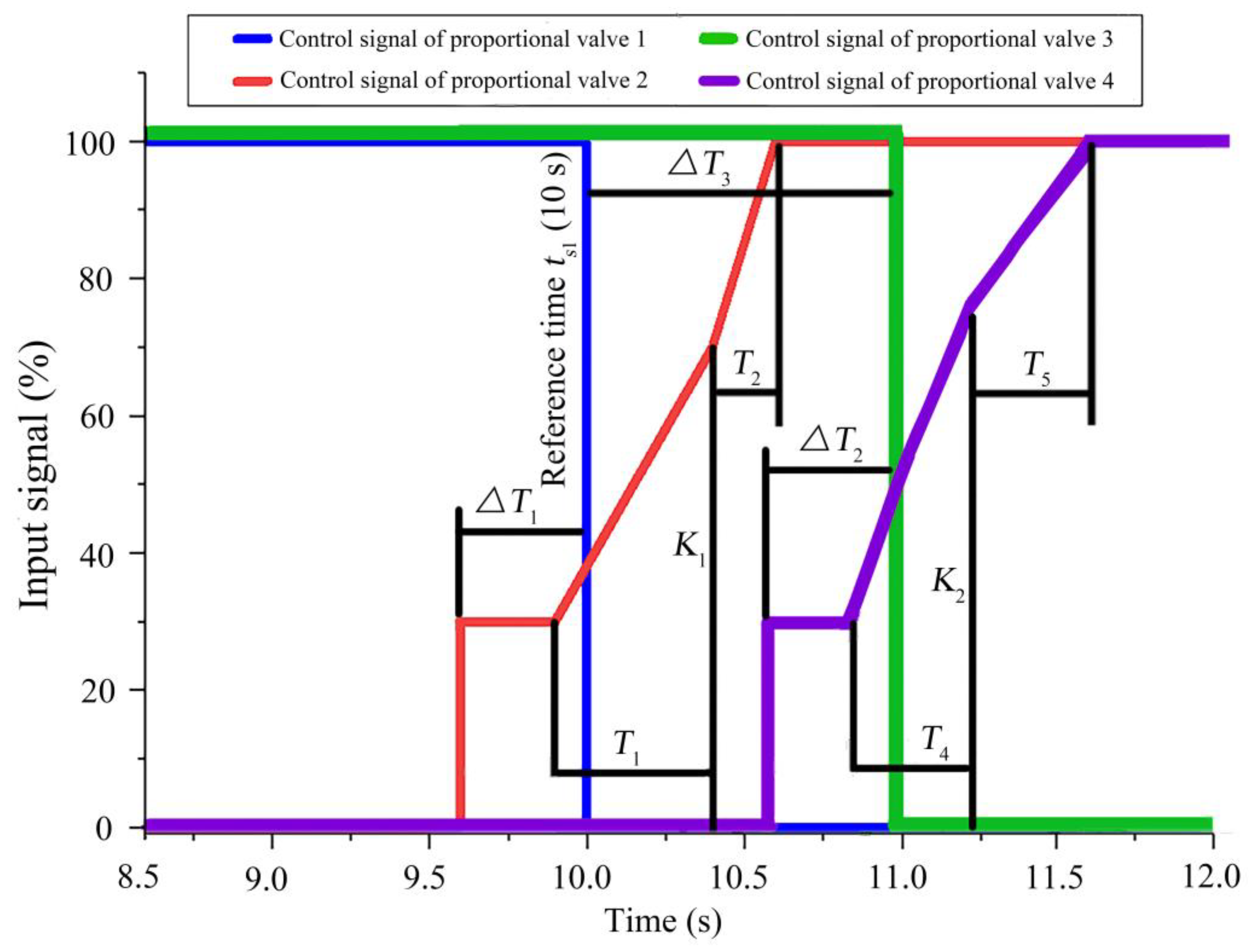
3.3.1. Determination of Shift Points
3.3.2. Optimization of Shifting Quality
3.4. Discussion
4. Conclusions
- (1)
- The degree of influence of each factor with the direct-shift method is ranked as follows: the reverse starting point Ts, the time difference ΔT, time T2, current K1, current K2, time T5, time T4, time T1, and the reverse duration Td. The best combination of factors is A3B4C3D1E1F4G3H3I1.
- (2)
- The degree of influence of each factor with the bridge-shift method is ranked as follows: the reverse starting point Ts, time T1, time T4, time difference ΔT3, time difference ΔT1, time T2, the reverse duration Td1, time difference ΔT2, displacement ratio et, swash plate axial piston unit’s reversal start point, current K2, the reverse duration Td2, and time T5. The optimum level combination is A3B3C2D3E1F1G1H2I1J3K3L1M1.
- (3)
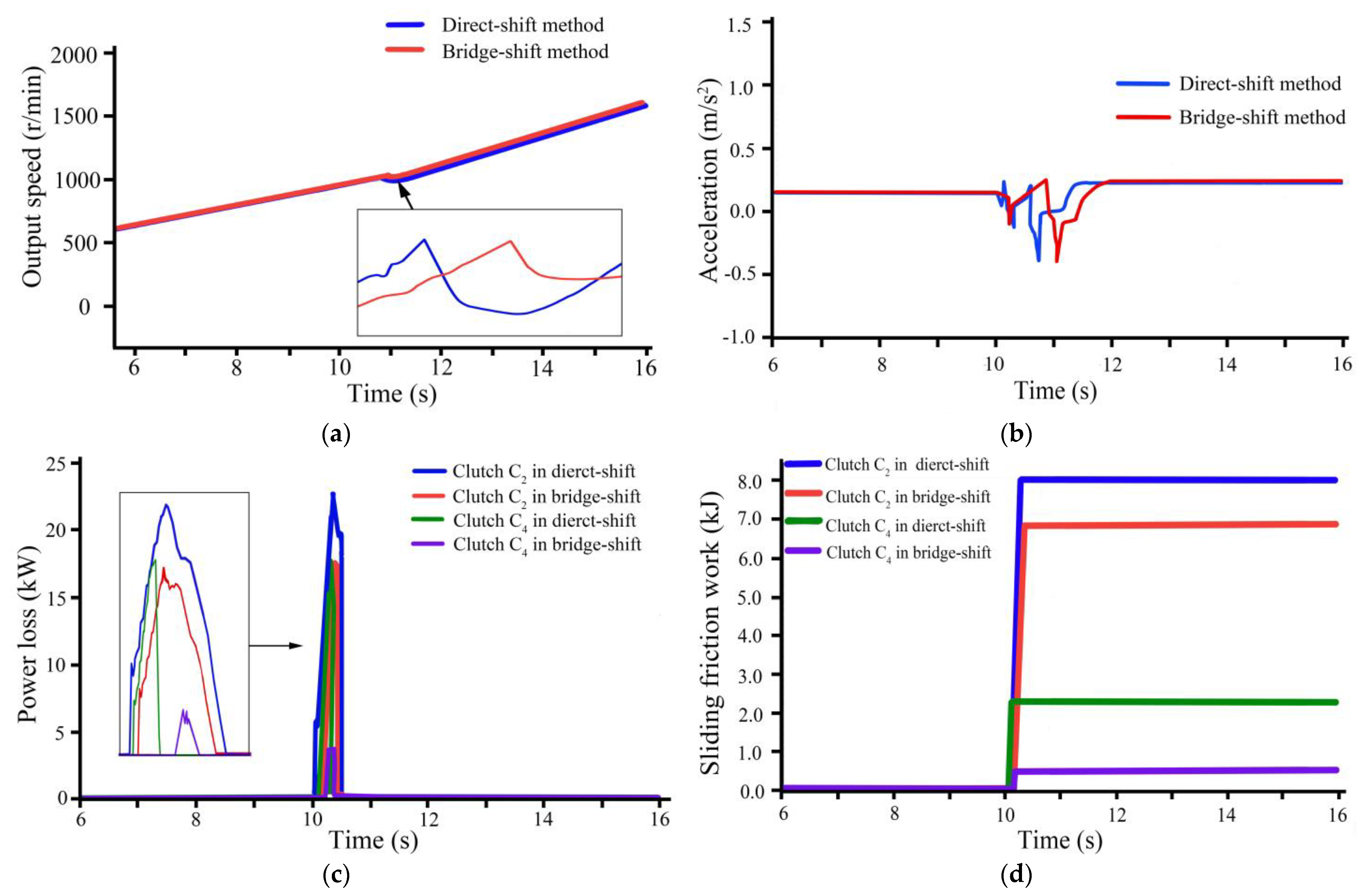
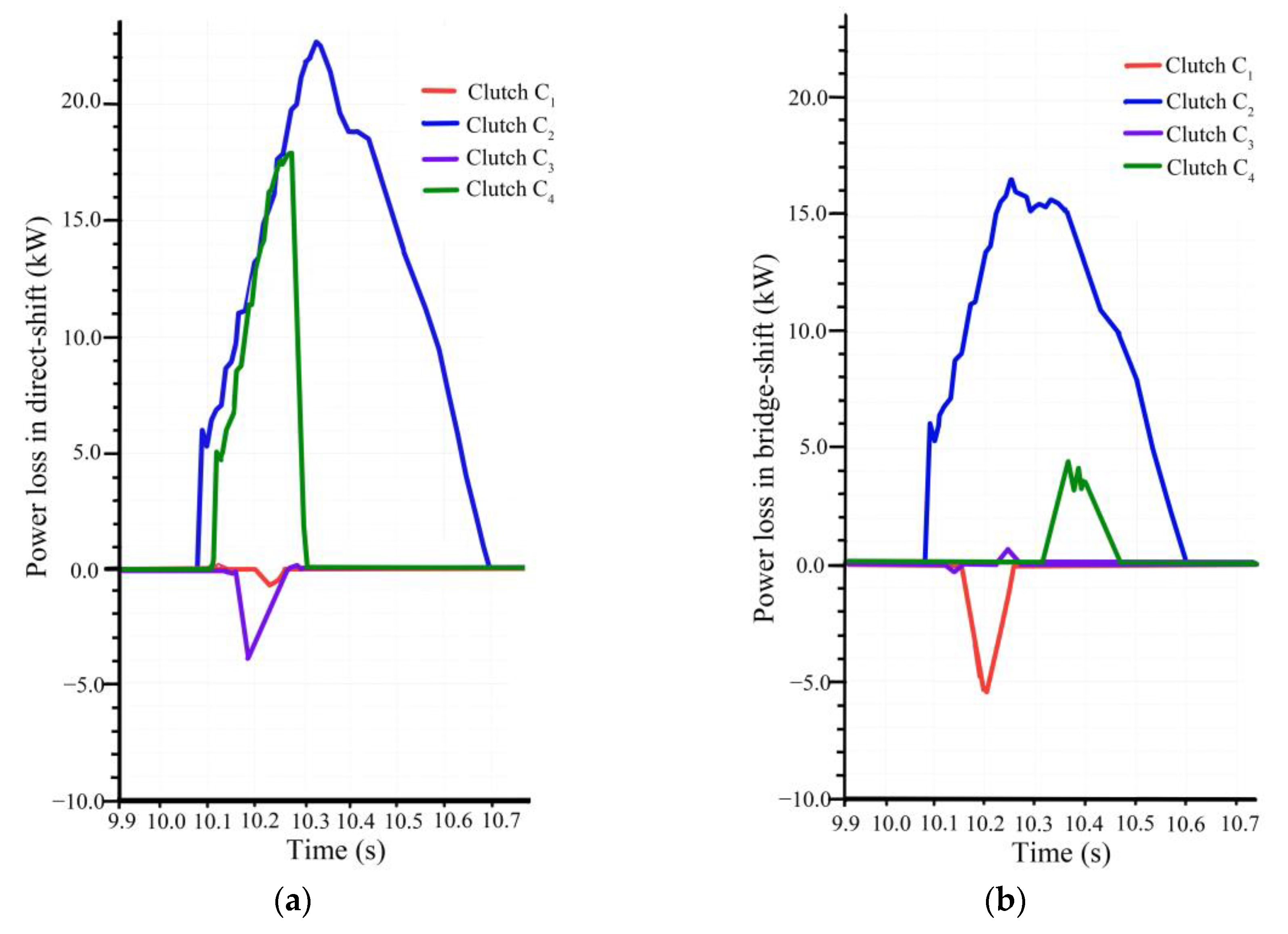
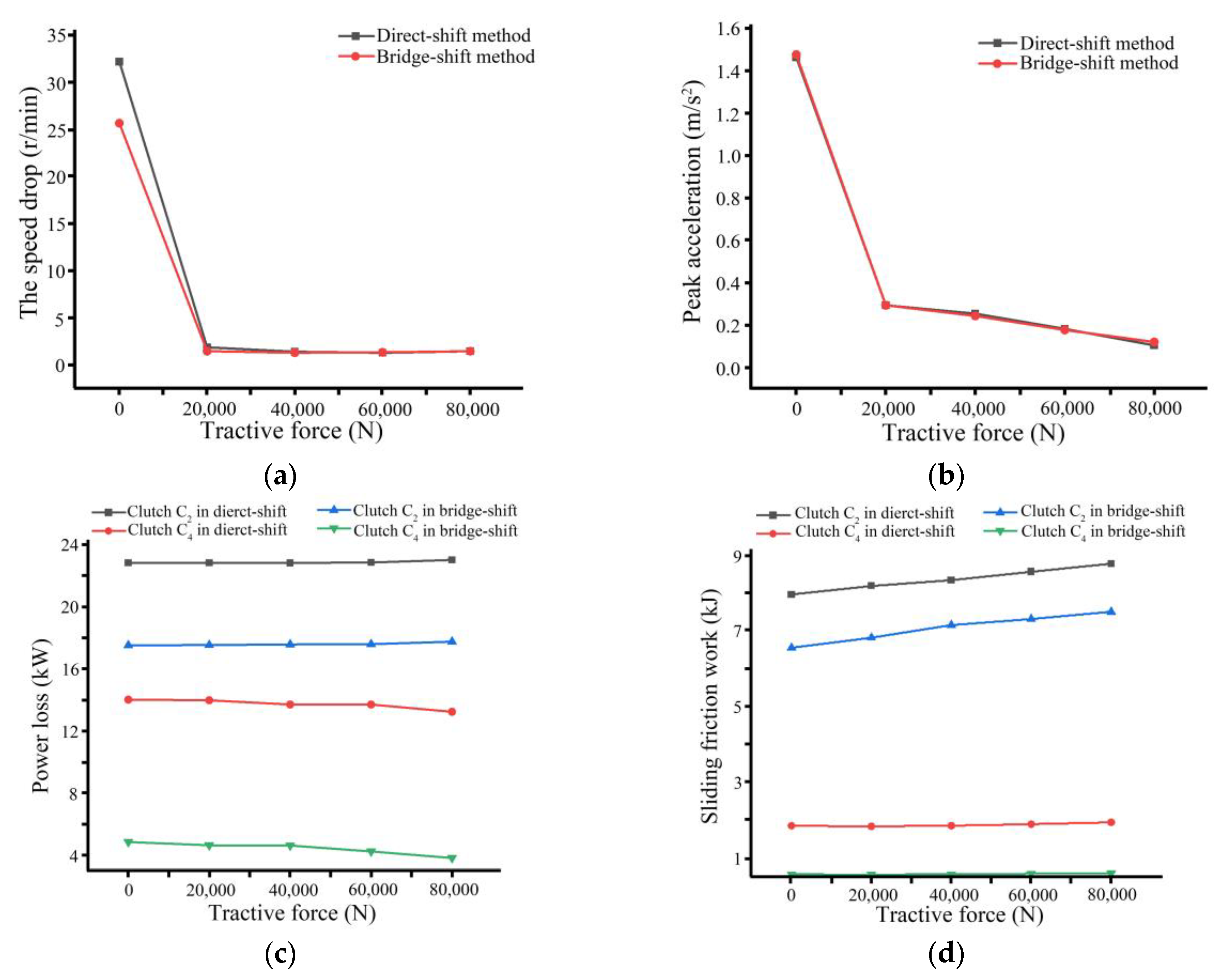
- Compared with the direct-shift method, the bridge-shift method reduces the speed drop by 47.72%, the power loss of clutch C2 by 22.82%, the sliding friction work of clutch C2 by 14.92%, the power loss of clutch C4 by 74.48%, and the sliding friction work of clutch C4 by 75.84%. In addition, the influence of the two control strategies on the peak acceleration can be ignored.
- (4)
- Under different tractive forces, the quality of the bridge-shift method is better than that of the direct-shift method, and no power interruption phenomenon was observed in all the simulation calculations.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, X.; Vacca, A. Advanced design and optimal sizing of hydrostatic transmission systems. Actuators 2021, 10, 243. [Google Scholar] [CrossRef]
- Dario, R.; Macro, C. Power losses in power-split CVTs: A fast black-box approximate method. Mech. Mach. Theory 2018, 128, 528–543. [Google Scholar] [CrossRef]
- Kim, J.Y.; Bae, D.S. Development of 3D dynamic and 1D numerical model for computing pulley ratio of chain CVT transmission. Int. J. Auto. Technol. 2022, 23, 1045–1053. [Google Scholar] [CrossRef]
- Chen, Y.; Cheng, Z.; Qian, Y. Fuel consumption comparison between hydraulic mechanical continuously variable transmission and stepped automatic transmission based on the economic control strategy. Machines 2022, 10, 699. [Google Scholar] [CrossRef]
- İnce, E.; Güler, M.A. On the advantages of the new power-split infinitely variable transmission over conventional mechanical transmissions based on fuel consumption analysis. J. Clean. Prod. 2020, 244, 118795. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, J.; Wang, J.; Guo, Z.; Guo, F.; Xi, Z.; Xu, J. Speed changing control strategy for improving tractor fuel economy. Trans. Chin. Soc. Agric. Eng. 2020, 36, 82–89. [Google Scholar]
- Wang, G.; Zhao, Y.; Song, Y.; Xue, L.; Chen, X. Optimizing the fuel economy of hydrostatic power-split system in continuously variable tractor transmission. Heliyon 2023, 9, e15915. [Google Scholar] [CrossRef]
- Renius, K.T. Fundamentals of Tractor Design; Springer Nature: Cham, Switzerland, 2020. [Google Scholar]
- Renius, K.T.; Resch, R. Continuously variable tractor transmissions. In Proceedings of the 2005 Agriculture Equipment Technology Conference, Louisville, KY, USA, 14–16 February 2005. [Google Scholar]
- Xia, Y.; Sun, D.; Qin, D.; Zhou, X. Optimisation of the power-cycle hydro-mechanical parameters in a continuously variable transmission designed for agricultural tractors. Biosyst. Eng. 2020, 193, 12–24. [Google Scholar] [CrossRef]
- Liu, F.; Wu, W.; Hu, J.; Yuan, S. Design of multi-range hydro-mechanical transmission using modular method. Mech. Syst. Signal Process. 2019, 126, 1–20. [Google Scholar] [CrossRef]
- Wang, J.; Xia, C.; Fan, X.; Cai, J. Research on transmission characteristics of hydromechanical continuously variable transmission of tractor. Math. Probl. Eng. 2020, 2020, 6978329. [Google Scholar] [CrossRef]
- Li, B.; Pan, J.; Li, Y.; Ni, K.; Huang, W.; Jiang, H.; Liu, F. Optimization method of speed ratio for power-shift transmission of agricultural tractor. Machines 2023, 11, 438. [Google Scholar] [CrossRef]
- Wang, J.; Xia, C.; Fan, X.; Cai, J. Research on the influence of tractor parameters on shift quality, based on uniform design. Appl. Sci. 2022, 12, 4895. [Google Scholar] [CrossRef]
- Li, B.; Ni, K.; Li, Y.; Pan, J.; Huang, W.; Jiang, H.; Liu, F. Control strategy of shuttle shifting process of agricultural tractor during headland turn. IEEE Access 2023, 11, 38436–38447. [Google Scholar] [CrossRef]
- Bao, M.; Ni, X.; Zhao, X.; Li, S. Research on the HMCVT gear shifting smoothness of the four-speed self-propelled cotton picker. Mech. Sci. 2020, 11, 267–283. [Google Scholar] [CrossRef]
- Chen, Y.; Qian, Y.; Lu, Z.; Zhou, S.; Xiao, M.; Bartos, P.; Xiong, Y.; Jin, G.; Zhang, W. Dynamic characteristic analysis and clutch engagement test of HMCVT in the high-power tractor. Complexity 2021, 2021, 8891127. [Google Scholar] [CrossRef]
- Iqbal, S.; Al-bender, F.; Ompusunggu, A.P.; Pluymers, B.; Desmet, W. Modeling and analysis of wet friction clutch engagement dynamics. Mech. Syst. Signal Process. 2015, 60–61, 420–436. [Google Scholar] [CrossRef]
- Wang, G.; Xue, L.; Zhu, Y.; Zhao, Y.; Jiang, H.; Wang, J. Fault diagnosis of power-shift system in continuously variable transmission tractors based on improved Echo State Network. Eng. Appl. Artif. Intel. 2023, in press. [Google Scholar]
- Xiang, Y.; Li, R.; Brach, C.; Liu, X.; Geimer, M. A novel algorithm for hydrostatic-mechanical mobile machines with a dual-clutch transmission. Energies 2022, 15, 2095. [Google Scholar] [CrossRef]
- Li, G.; Görges, D. Optimal control of the gear shifting process for shift smoothness in dual-clutch transmissions. Mech. Syst. Signal Process. 2018, 103, 23–38. [Google Scholar] [CrossRef]
- Li, J.; Dong, H.; Han, B.; Zhang, Y.; Zhu, Z. Designing comprehensive shifting control strategy of hydro-mechanical continuously variable transmission. Appl. Sci. 2022, 12, 5716. [Google Scholar] [CrossRef]
- Duncan, J.R.; Wegscheid, E.L. Determinants of off-road vehicle transmission ‘shift quality’. Appl Ergon. 1985, 16, 173–178. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Range | Clutches | Displacement Ratio of Pump to Motor | Tractor Speed at Rated Engine Speed/(km/h) | |||||
|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | CF | CR | |||
| HM1 | ● | ● | ● | −1→+1 | 2→14 | |||
| HM2 | ● | ● | ● | −1→+1 | 12→30 | |||
| HMR | ● | ● | ● | −0.9→+1 | 0→−16 | |||
| Input Signal/mA | Output Pressure/MPa | Spring Preload/N | Spring Stiffness/(N/mm) | Flow Coefficient | Mass of Spool/kg | Hole Diameter/mm |
|---|---|---|---|---|---|---|
| 4~20 | 0~2 | 20.0 | 19.9 | 0.6 | 0.52 | 1.2 |
| Clutch | Area of Friction Plate/(mm2) | Area of Piston/(mm2) | Number of Friction Plates | Spring Stiffness/(N/mm) | Frictional Coefficient |
|---|---|---|---|---|---|
| C1 | 7780 | 7210 | 7 | 19.6 | 0.12 |
| C2 | 6900 | 6090 | 8 | 10.42 | 0.11 |
| C3/C4 | 4780 | 3810 | 7 | 6.7 | 0.08 |
| Level | T1/ms | T2/ms | K1/% | T4/ms | T5/ms | K2/% | ΔT/ms | Ts/s | Td/ms |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 200 | 400 | 40 | 200 | 400 | 40 | 350 | 9.9 | 500 |
| 2 | 250 | 500 | 50 | 250 | 500 | 50 | 400 | 10 | 650 |
| 3 | 300 | 600 | 60 | 300 | 600 | 60 | 450 | 10.1 | 800 |
| 4 | 350 | 700 | 70 | 350 | 700 | 70 | 500 | 10.2 | 950 |
| Factor | A | B | C | D | E | F | G | H | I | Peak Acceleration | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Number | |||||||||||
| Test 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 2.754091 | |
| Test 2 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2.218880 | |
| Test 3 | 1 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 0.746190 | |
| Test 4 | 1 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 1.523540 | |
| Test 5 | 2 | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 1.526142 | |
| Test 6 | 2 | 2 | 2 | 1 | 1 | 4 | 4 | 3 | 3 | 1.028317 | |
| Test 7 | 2 | 3 | 3 | 4 | 4 | 1 | 1 | 2 | 2 | 2.135518 | |
| Test 8 | 2 | 4 | 4 | 3 | 3 | 2 | 2 | 1 | 1 | 2.862647 | |
| Test 9 | 3 | 1 | 2 | 3 | 4 | 1 | 2 | 3 | 4 | 1.061769 | |
| Test 10 | 3 | 2 | 1 | 4 | 3 | 2 | 1 | 4 | 3 | 0.627891 | |
| Test 11 | 3 | 3 | 4 | 1 | 2 | 3 | 4 | 1 | 2 | 3.136779 | |
| Test 12 | 3 | 4 | 3 | 2 | 1 | 4 | 3 | 2 | 1 | 0.614615 | |
| Test 13 | 4 | 1 | 2 | 4 | 3 | 3 | 4 | 2 | 1 | 2.631731 | |
| Test 14 | 4 | 2 | 1 | 3 | 4 | 4 | 3 | 1 | 2 | 3.048925 | |
| Test 15 | 4 | 3 | 4 | 2 | 1 | 1 | 2 | 4 | 3 | 1.001010 | |
| Test 16 | 4 | 4 | 3 | 1 | 2 | 2 | 1 | 3 | 4 | 0.674891 | |
| Test 17 | 1 | 1 | 4 | 1 | 4 | 2 | 3 | 2 | 3 | 1.952227 | |
| Test 18 | 1 | 2 | 3 | 2 | 3 | 1 | 4 | 1 | 4 | 2.758566 | |
| Test 19 | 1 | 3 | 2 | 3 | 2 | 4 | 1 | 4 | 1 | 0.501519 | |
| Test 20 | 1 | 4 | 1 | 4 | 1 | 3 | 2 | 3 | 2 | 0.814421 | |
| Test 21 | 2 | 1 | 4 | 2 | 3 | 4 | 1 | 3 | 2 | 0.627852 | |
| Test 22 | 2 | 2 | 3 | 1 | 4 | 3 | 2 | 4 | 1 | 0.584379 | |
| Test 23 | 2 | 3 | 2 | 4 | 1 | 2 | 3 | 1 | 4 | 2.766946 | |
| Test 24 | 2 | 4 | 1 | 3 | 2 | 1 | 4 | 2 | 3 | 1.894956 | |
| Test 25 | 3 | 1 | 3 | 3 | 1 | 2 | 4 | 4 | 2 | 0.901438 | |
| Test 26 | 3 | 2 | 4 | 4 | 2 | 1 | 3 | 3 | 1 | 1.022129 | |
| Test 27 | 3 | 3 | 1 | 1 | 3 | 4 | 2 | 2 | 4 | 1.486624 | |
| Test 28 | 3 | 4 | 2 | 2 | 4 | 3 | 1 | 1 | 3 | 2.839502 | |
| Test 29 | 4 | 1 | 3 | 4 | 2 | 4 | 2 | 1 | 3 | 2.871530 | |
| Test 30 | 4 | 2 | 4 | 3 | 1 | 3 | 1 | 2 | 4 | 1.853240 | |
| Test 31 | 4 | 3 | 1 | 2 | 4 | 2 | 4 | 3 | 1 | 0.999228 | |
| Test 32 | 4 | 4 | 2 | 1 | 3 | 1 | 3 | 4 | 2 | 0.398879 | |
| Factor | T1 | T2 | K1 | T4 | T5 | K2 | ΔT | Ts | Td |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1.569 | 1.791 | 1.644 | 1.502 | 1.467 | 1.628 | 1.502 | 2.880 | 1.496 |
| 2 | 1.678 | 1 643 | 1.681 | 1.573 | 1.731 | 1.626 | 1.613 | 1.848 | 1.660 |
| 3 | 1.461 | 1.597 | 1.411 | 1.609 | 1 518 | 1.767 | 1.510 | 0.872 | 1.620 |
| 4 | 1.685 | 1.453 | 1.747 | 1.799 | 1.768 | 1.463 | 1.859 | 0.883 | 1.706 |
| Range | 0.224 | 0.338 | 0.336 | 0.297 | 0.301 | 0.304 | 0.357 | 2.008 | 0.210 |
| Level | T1/ms | T2/ms | K1/% | T4/ms | T5/ms | K2/% | ΔT1/ms | ΔT2/ms | ΔT3/ms | Ts/s | Td1/ms | Td2/ms | et/s |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 250 | 500 | 50 | 250 | 500 | 50 | 400 | 400 | 500 | 9.9 | 150 | 350 | −1 |
| 2 | 300 | 600 | 60 | 300 | 600 | 60 | 450 | 450 | 750 | 10 | 200 | 500 | −0.95 |
| 3 | 350 | 700 | 70 | 350 | 700 | 70 | 500 | 500 | 1000 | 10.1 | 250 | 650 | −0.9 |
| Factor | A | B | C | D | E | F | G | H | I | J | K | L | M | Peak Acceleration | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Number | |||||||||||||||
| Test 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 2.693358 | |
| Test 2 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2.655476 | |
| Test 3 | 1 | 1 | 1 | 1 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 1.527961 | |
| Test 4 | 1 | 2 | 2 | 2 | 1 | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 1.152763 | |
| Test 5 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 1 | 1 | 1 | 1.169344 | |
| Test 6 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 1 | 1 | 1 | 2 | 2 | 2 | 2.620924 | |
| Test 7 | 1 | 3 | 3 | 3 | 1 | 1 | 1 | 3 | 3 | 3 | 2 | 2 | 2 | 0.986310 | |
| Test 8 | 1 | 3 | 3 | 3 | 2 | 2 | 2 | 1 | 1 | 1 | 3 | 3 | 3 | 2.600973 | |
| Test 9 | 1 | 3 | 3 | 3 | 3 | 3 | 3 | 2 | 2 | 2 | 1 | 1 | 1 | 1.178958 | |
| Test 10 | 2 | 1 | 2 | 3 | 1 | 2 | 3 | 2 | 2 | 3 | 1 | 2 | 3 | 0.840597 | |
| Test 11 | 2 | 1 | 2 | 3 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2.284741 | |
| Test 12 | 2 | 1 | 2 | 3 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 1.072096 | |
| Test 13 | 2 | 2 | 3 | 1 | 1 | 2 | 3 | 2 | 3 | 1 | 3 | 1 | 2 | 2.606293 | |
| Test 14 | 2 | 2 | 3 | 1 | 2 | 3 | 1 | 3 | 1 | 2 | 1 | 2 | 3 | 1.374078 | |
| Test 15 | 2 | 2 | 3 | 1 | 3 | 1 | 2 | 1 | 1 | 3 | 2 | 3 | 1 | 1.139140 | |
| Test 16 | 2 | 3 | 1 | 2 | 1 | 2 | 2 | 3 | 1 | 2 | 2 | 3 | 1 | 1.244164 | |
| Test 17 | 2 | 3 | 1 | 2 | 2 | 3 | 3 | 1 | 2 | 3 | 3 | 1 | 2 | 0.545924 | |
| Test 18 | 2 | 3 | 1 | 2 | 3 | 1 | 1 | 2 | 3 | 1 | 1 | 2 | 3 | 2.701621 | |
| Test 19 | 3 | 1 | 3 | 2 | 1 | 3 | 2 | 1 | 3 | 2 | 1 | 3 | 2 | 1.371793 | |
| Test 20 | 3 | 1 | 3 | 2 | 2 | 1 | 3 | 2 | 1 | 3 | 2 | 1 | 3 | 0.451569 | |
| Test 21 | 3 | 1 | 3 | 2 | 3 | 2 | 1 | 3 | 2 | 1 | 3 | 2 | 1 | 2.626360 | |
| Test 22 | 3 | 2 | 1 | 3 | 1 | 3 | 2 | 2 | 1 | 3 | 3 | 2 | 1 | 0.417362 | |
| Test 23 | 3 | 2 | 1 | 3 | 2 | 1 | 3 | 3 | 2 | 1 | 1 | 3 | 2 | 2.697961 | |
| Test 24 | 3 | 2 | 1 | 3 | 3 | 2 | 1 | 1 | 3 | 2 | 2 | 1 | 3 | 1.339399 | |
| Test 25 | 3 | 3 | 2 | 1 | 1 | 3 | 2 | 3 | 2 | 1 | 2 | 1 | 3 | 2.665314 | |
| Test 26 | 3 | 3 | 2 | 1 | 2 | 1 | 3 | 1 | 3 | 2 | 3 | 2 | 1 | 1.008765 | |
| Test 27 | 3 | 3 | 2 | 1 | 3 | 2 | 1 | 2 | 1 | 3 | 1 | 3 | 2 | 0.411107 | |
| Factor | T1/ms | T2/ms | K1/ms | T4/ms | T5 | K2 | ΔT1 | ΔT2 | ΔT3 | Ts | Td1 | Td2 | et |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1.843 | 1.726 | 1.758 | 1.787 | 1.553 | 1.545 | 1.492 | 1.573 | 1.432 | 2.612 | 1.604 | 1.525 | 1.530 |
| 2 | 1.535 | 1.613 | 1.471 | 1.543 | 1.644 | 1.722 | 1.755 | 1.541 | 1.722 | 1.378 | 1.711 | 1.692 | 1.663 |
| 3 | 1.443 | 1.483 | 1.593 | 1.492 | 1.624 | 1.555 | 1.575 | 1.707 | 1.667 | 0.832 | 1.506 | 1.605 | 1.628 |
| Range | 0.400 | 0.243 | 0.287 | 0.295 | 0.091 | 0.177 | 0.263 | 0.166 | 0.290 | 1.780 | 0.205 | 0.167 | 0.133 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Wang, J.; Yang, Y.; Wang, G.; Fu, S. Optimization of Shifting Quality for Hydrostatic Power-Split Transmission with Single Standard Planetary Gear Set. Agriculture 2023, 13, 1685. https://doi.org/10.3390/agriculture13091685
Xu Z, Wang J, Yang Y, Wang G, Fu S. Optimization of Shifting Quality for Hydrostatic Power-Split Transmission with Single Standard Planetary Gear Set. Agriculture. 2023; 13(9):1685. https://doi.org/10.3390/agriculture13091685
Chicago/Turabian StyleXu, Zhaorui, Jiabo Wang, Yanqiang Yang, Guangming Wang, and Shenghui Fu. 2023. "Optimization of Shifting Quality for Hydrostatic Power-Split Transmission with Single Standard Planetary Gear Set" Agriculture 13, no. 9: 1685. https://doi.org/10.3390/agriculture13091685
APA StyleXu, Z., Wang, J., Yang, Y., Wang, G., & Fu, S. (2023). Optimization of Shifting Quality for Hydrostatic Power-Split Transmission with Single Standard Planetary Gear Set. Agriculture, 13(9), 1685. https://doi.org/10.3390/agriculture13091685