
Design and Experiment of Adaptive Profiling Header Based on Multi-Body Dynamics–Discrete Element Method Coupling

Abstract
:1. Introduction
2. Adaptive Profiling Header Structure
2.1. Structure
2.2. Working Principle
3. Key Component Design
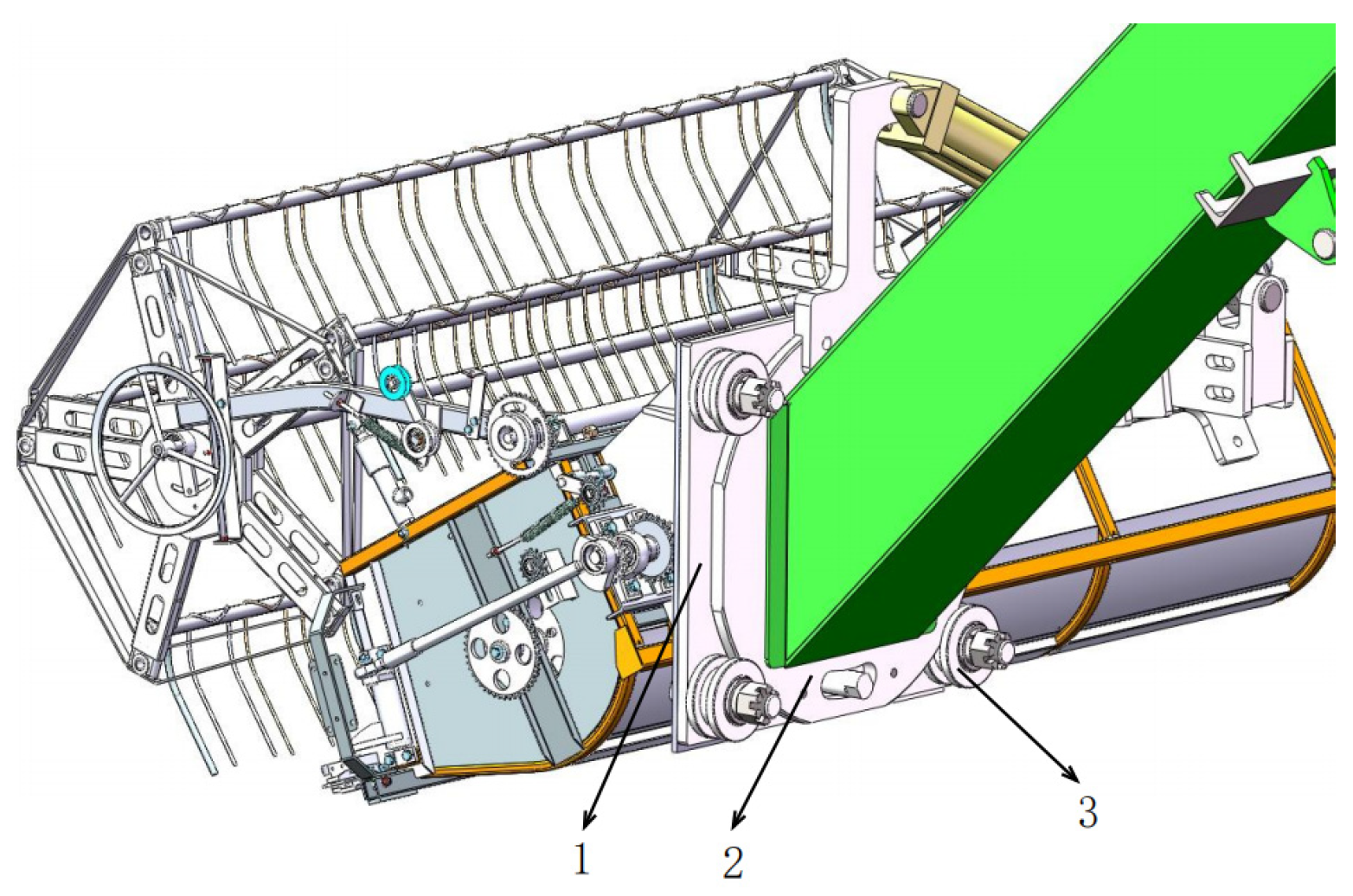
3.1. Profiling Mechanism
3.2. Characterization of Header Height
3.3. Analysis of Header Height Adjustment Motion
3.4. Analysis of Header Horizontal Adjustment Movement
4. MBD-DEM Coupling
4.1. Multi-Body Dynamics Modeling
4.2. Discrete Element Modeling
5. Simulation Result Analysis
5.1. The Three-Factor Quadratic Regression Orthogonal Rotational Combination Method
5.2. Result Analysis
5.3. Response Surface Analysis
- (1)
- Interaction between the profiling wheel linkage length and the profiling wheel width
- (2)
- Interaction between the length of the profiling wheel linkage and the mass of the profiling wheel
- (3)
- Interaction between the width of the profiling wheel and the mass of the profiling wheel
5.4. Optimization of Optimal Parameters
6. Control System Design
6.1. Fuzzy Controller Design
- (1)
- When the deviation is large, to eliminate the deviation as soon as possible, improve the response speed, and avoid overshoot in the system response, it is necessary to increase KP and reduce KD, with KI usually set to zero.
- (2)
- When the deviation is small, to further reduce the deviation and prevent excessive overshoot, oscillation, and deterioration of stability, KP and KI should be increased to ensure the steady-state performance of the system.
- (3)
- When the deviation and deviation rate of change are the same sign, the controlled quantity changes in the direction of deviation from the predetermined value. Therefore, when the controlled quantity approaches a fixed value, the proportional effect of the inverse sign hinders the integral effect, avoiding integral overshoot and subsequent oscillations, which is beneficial for control.
- (4)
- When the deviation change rate is large, KP should be reduced and KI should be increased.
6.2. Fuzzy PID Control Simulation
7. Tests
7.1. Test Plan
7.2. Analysis of Test Results
8. Discussion
9. Conclusions
- An adaptive profiling header was designed, including the profiling mechanism and control system of the header. Geometric modeling and mechanical analysis models were established. Real-time measurements of the header height were achieved through the profiling mechanism, and the height and angle of the header were adjusted by the expansion and contraction of the cylinder to achieve the adaptive leveling control of the header.
- The MBD-DEM coupling method was used to analyze the motion characteristics of the adaptive profiling header. A three-factor quadratic regression orthogonal rotation combination experiment was conducted using the profiling wheel linkage length, profiling wheel width, and profiling wheel mass as experimental factors. The results indicated that the optimal profiling effect was achieved when the profiling wheel linkage length, profiling wheel width, and profiling wheel mass were 562 mm, 20 mm, and 3.6 kg, respectively.
- The test results indicate that the header profiling mechanism can accurately perceive changes in field terrain with high profiling accuracy. It can effectively meet the harvesting and usage requirements of ratooning rice. The experimental results are basically consistent with the mathematical model and MBD-DEM coupled simulation results. That is to say, adjusting the height and horizontal angle of the header through PID fuzzy control is a feasible method. This is of great significance for further improving the yield of ratooning rice.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, M.; Wang, Z.; Luo, X.; Guo, W. Review of precision rice hill-drop drilling technology and machine for paddy. Int. J. Agric. Biol. Eng. 2018, 11, 1–11. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, C.; Xiao, S.; Sun, Y.; Huang, J.; Peng, S. Agronomic responses of ratoon rice to nitrogen management in central China. Field Crops Res. 2019, 241, 107569. [Google Scholar] [CrossRef]
- Yuan, S.; Cassman, K.; Huang, J.; Peng, S.; Grassini, P. Can ratoon cropping improve resource use efficiencies and profitability of rice in central China. Field Crops Res. 2019, 234, 66–72. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; He, A.; Jiang, G.; Sun, H.; Jiang, M.; Man, J.; Ling, X.; Cui, K.; Huang, J.; Peng, S. Ratoon rice technology: A green and resource-efficient way for rice production. Adv. Agron. 2020, 159, 135–167. [Google Scholar]
- Alizadeh, M.R.; Habibi, F. A comparative study on the quality of the main and ratoon rice crops. J. Food Qual. 2016, 39, 669–674. [Google Scholar] [CrossRef]
- Yu, X.; Yuan, S.; Tao, X. Comparisons between main and ratoon crops in resource use efficiencies, environmental impacts, and economic profits of rice ratooning system in central China. Sci. Total Environ. 2021, 799, 149–246. [Google Scholar] [CrossRef]
- Liu, W.; Luo, X.; Zeng, S.; Wen, Z.; Zeng, L. Study on field turning mechanism and performance test of crawler ratooning rice harvester. J. Jilin Univ. Eng. Technol. Ed. 2023, 53, 2659–2705. [Google Scholar]
- Ling, X.; Zhang, T.; Deng, N.; Yuan, S.; Huang, J. Modelling rice growth and grain yield in rice ratooning production system. Field Crops Res. 2019, 241, 107574. [Google Scholar] [CrossRef]
- Liu, W.; Luo, X.; Zeng, S.; Zang, Y. Numerical simulation and experiment of grain motion in the conveying system of ratooning rice harvesting machine. Int. J. Agric. Biol. Eng. 2022, 15, 103–115. [Google Scholar] [CrossRef]
- Liu, W.; Luo, X.; Zeng, S.; Zeng, L.; Wen, Z. The Design and Test of the Chassis of a Triangular Crawler-Type Ratooning Rice Harvester. Agriculture 2022, 12, 890. [Google Scholar] [CrossRef]
- Harrell, D.L.; Bond, J.A.; Blanche, S. Evaluation of main-crop stubble height on ratoon rice growth and development. Field Crops Res. 2009, 114, 396–403. [Google Scholar] [CrossRef]
- Dong, H.; Chen, Q.; Wang, W.; Peng, S.; Huang, J.; Cui, K.; Nie, L. The growth and yield of a wet-seeded rice-ratoon rice system in central China. Field Crops Res. 2017, 208, 55–59. [Google Scholar] [CrossRef]
- Tulpule, P.; Kelkar, A. Integrated robust optimal design (IROD) of header height control system for combine harvester. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 2699–2704. [Google Scholar]
- Kassen, D.; Kelkar, A. Combine harvester header height control via robust feedback linearization. In Proceedings of the 2017 Indian Control Conference(ICC), Guwahati, India, 4–6 January 2017; pp. 1–6. [Google Scholar]
- Ni, Y.; Jin, C.; Chen, M.; Yuan, W.; Qian, Z.; Yang, T.; Cai, Z. Computational model and adjustment system of header height of soybean harvesters based on soil-machine system. Comput. Electron. Agric. 2021, 183, 105907. [Google Scholar] [CrossRef]
- Liu, W.; Luo, X.; Zeng, S.; Zeng, L. Performance test and analysis of the self-adaptive profiling header for ratooning rice based on fuzzy PID control. Trans. Chin. Soc. Agric. Eng. 2022, 38, 1–9. [Google Scholar]
- Xie, Y.; Alleyne, A.; Greer, A. Fundamental limits in combine harvester header height control. J. Dyn. Syst. Meas. Control 2013, 135, 034503. [Google Scholar] [CrossRef] [PubMed]
- Tong, Z.; Zheng, B.; Yang, Y. CFD-DEM investigation of the dispersion mechanisms in commercial dry powder inhalers. Powder Technol. 2013, 240, 19–24. [Google Scholar] [CrossRef]
- Xian, R.; Hermann, N. Simulation of particles and sediment behaviour in centrifugal field by coupling CFD and DEM. Chem. Eng. Sci. 2013, 94, 20–26. [Google Scholar]
- Ren, P.; Zhong, W.; Chen, Y. CFD-DEM simulation of spouting of corn-shaped particles. Particuology 2012, 10, 562–572. [Google Scholar] [CrossRef]
- Chu, K.; Chen, J.; Wang, B. Understand solids loading effects in a dense medium cyclone: Effect of particle size by a CFD-DEM method. Powder Technol. 2017, 320, 594–609. [Google Scholar] [CrossRef]
- Aman, M.; Mayank, K.; Narasimha, M. A coupled CFD-DEM model for tumbling mill dynamics-Effect of lifter profile. Powder Technol. 2024, 433, 119178. [Google Scholar]
- Ma, H.; Liu, Z.; Zhou, L.; Du, J.; Zhao, Y. Numerical investigation of the particle flow behaviors in a fluidized-bed drum by CFD-DEM. Powder Technol. 2023, 429, 118891. [Google Scholar] [CrossRef]
- Wang, Y.; Kang, X.; Wang, G.; Ji, W. Numerical Analysis of Friction-Filling Performance of Friction-Type Vertical Disc Precision Seed-Metering Device Based on EDEM. Agriculture 2023, 13, 2183. [Google Scholar] [CrossRef]
- Rajendiran, S.; Lakshmi, P. Simulation of PID and fuzzy logic controller for integrated seat suspension of a quarter car with driver model for different road profiles. J. Mech. Sci. Technol. 2016, 30, 4565–4570. [Google Scholar] [CrossRef]
- Yanwu, G.; Ying, H.; Xiang, D.; Meiqi, H.; Gang, L. Fuzzy-PID Speed Control of Diesel Engine Based on Load Estimation. SAE Int. J. Engines 2015, 8, 1669–1677. [Google Scholar]
- Zhu, Q.; Zhu, Z.; Zhang, H. Design of an Electronically Controlled Fertilization System for an Air-Assisted Side-Deep Fertilization Machine. Agriculture 2023, 13, 2210. [Google Scholar] [CrossRef]
- Li, C.; Wu, J.; Pan, X. Design and Experiment of a Breakpoint Continuous Spraying System for Automatic-Guidance Boom Sprayers. Agriculture 2023, 13, 2203. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and Experiment of a Variable Spray System for Unmanned Aerial Vehicles Based on PID and PWM Control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef]
- Xu, Y.; Gao, Z.; Khot, L.; Meng, X.; Zhang, Q. A Real-Time Weed Mapping and Precision Herbicide Spraying System for Row Crops. Sensors 2018, 18, 4245. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Cutting width (mm) | 1200 |
| Header auger type | Telescopic lateral conveying |
| Reel type | Eccentric gear shifting type |
| Chopper type | Reciprocating type |
| Feeding amount (kg·s−1) | 1000 |
| Mass (kg) | 440 |
| Maximum height (mm) | 800 |
| Leveling angle range (°) | ±10 |
| No. | Part I | Part II | Kinematic Pair |
|---|---|---|---|
| 1 | Header | Ground | Translate |
| 2 | Header | Profiling wheel | Revolute |
| 3 | Profiling bracket | Four-link | Revolute |
| 4 | Four-link | Angle sensor | Revolute |
| No. | Parameters | Value |
|---|---|---|
| 1 | Soil particle radius/mm | 5 |
| 2 | Soil particle density/(kg·m−3) | 2600 |
| 3 | Poisson’s ratio of soil particles | 0.38 |
| 4 | Static friction coefficient between soil particles | 0.6 |
| 5 | Rolling friction coefficient between soil particles | 0.26 |
| 6 | Shear modulus between soil particles/MPa | 1 |
| 7 | Recovery coefficient between soil particles | 0.37 |
| 8 | Contact adhesion energy of soil particles/J·m2 | 15.6 |
| 9 | Soil particle adhesion strength/N | −0.001 |
| 10 | Soil particle contact plasticity ratio | 0.36 |
| 11 | Soil particles–profiling wheel static friction coefficient | 0.31 |
| 12 | Soil particles–profiling wheel rolling friction coefficient | 0.13 |
| 13 | Soil particles–profiling wheel recovery coefficient | 0.54 |
| 14 | Cohesive modulus/(kN/mn+1) | 42.538 |
| 15 | Internal friction modulus/(kN/mn+2) | 9.004 |
| 16 | Soil deformation index | 0.8227 |
| 17 | Soil moisture content/% | 37.3 |
| 18 | Soil compaction/kPa | 3093.5 |
| Code | Length of Profiling Wheel Linkage (mm) | Width of Profiling Wheel (mm) | Profiling Wheel Mass (kg) |
|---|---|---|---|
| −1.682 | 450 | 15 | 2.5 |
| −1 | 490.54 | 18.04 | 3.01 |
| 0 | 550 | 22.5 | 3.75 |
| 1 | 609.46 | 26.96 | 4.49 |
| 1.682 | 650 | 30 | 5 |
| No. | Parameters | Value | ||||
|---|---|---|---|---|---|---|
| Length of Profiling Wheel Linkage X1 (mm) | Width of Profiling Wheel X2 (mm) | Profiling Wheel Mass X3 (kg) | Y1 | Y2 | Y3 | |
| 1 | −1 | −1 | −1 | 44.9 | 38 | 6.5 |
| 2 | 1 | −1 | −1 | 45.7 | 68 | 1.8 |
| 3 | −1 | 1 | −1 | 44.6 | 28 | 7.9 |
| 4 | 1 | 1 | −1 | 45.6 | 32 | 5.6 |
| 5 | −1 | −1 | 1 | 44.5 | 65 | 4.4 |
| 6 | 1 | −1 | 1 | 45.8 | 72 | 1.2 |
| 7 | −1 | 1 | 1 | 43.6 | 47 | 8.1 |
| 8 | 1 | 1 | 1 | 44.9 | 49 | 5.3 |
| 9 | −1.682 | 0 | 0 | 44.0 | 25 | 9.4 |
| 10 | 1.682 | 0 | 0 | 45.1 | 83 | 1.5 |
| 11 | 0 | −1.682 | 0 | 47.1 | 38 | 1.9 |
| 12 | 0 | 1.682 | 0 | 45.2 | 21 | 7.5 |
| 13 | 0 | 0 | −1.682 | 46.1 | 22 | 5.6 |
| 14 | 0 | 0 | 1.682 | 44.6 | 87 | 2.0 |
| 15 | 0 | 0 | 0 | 46.7 | 27 | 3.8 |
| 16 | 0 | 0 | 0 | 46.3 | 29 | 4.4 |
| 17 | 0 | 0 | 0 | 47.1 | 15 | 4.3 |
| 18 | 0 | 0 | 0 | 46.7 | 25 | 4.0 |
| 19 | 0 | 0 | 0 | 47.3 | 16 | 3.8 |
| 20 | 0 | 0 | 0 | 46.7 | 34 | 3.2 |
| 21 | 0 | 0 | 0 | 46.6 | 39 | 2.9 |
| 22 | 0 | 0 | 0 | 46.8 | 26 | 3.7 |
| 23 | 0 | 0 | 0 | 47 | 28 | 3.2 |
| Variance Source | The Header Support Force Y1 | The Soil Support Force Y2 | The Soil Subsidence Depth Y3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Square Sum | Degree of Freedom | F | p | Square Sum | Degree of Freedom | F | p | Square Sum | Degree of Freedom | F | p | |
| Model | 21.45 | 9 | 15.82 | <0.0001 ** | 8145.21 | 9 | 6.80 | 0.0030 ** | 102.10 | 9 | 20.96 | <0.0001 ** |
| X1 | 2.86 | 1 | 18.99 | 0.0014 ** | 1446.35 | 1 | 10.86 | 0.0081 ** | 50.59 | 1 | 93.46 | <0.0001 ** |
| X2 | 2.13 | 1 | 14.15 | 0.0037 ** | 978.35 | 1 | 7.35 | 0.0129 * | 36.80 | 1 | 67.98 | <0.0001 ** |
| X3 | 1.50 | 1 | 9.94 | 0.0103 * | 2276.33 | 1 | 17.09 | 0.0020 ** | 5.74 | 1 | 10.60 | 0.0086 ** |
| X1X2 | 0.005 | 1 | 0.033 | 0.8591 | 120.13 | 1 | 0.90 | 0.3646 | 0.98 | 1 | 1.81 | 0.2082 |
| X1X3 | 0.080 | 1 | 0.53 | 0.4829 | 78.13 | 1 | 0.59 | 0.4614 | 0.13 | 1 | 0.23 | 0.6412 |
| X2X3 | 0.24 | 1 | 1.63 | 0.2310 | 3.13 | 1 | 0.023 | 0.8813 | 0.84 | 1 | 1.56 | 0.2400 |
| X12 | 10.69 | 1 | 70.98 | <0.0001 ** | 1753.01 | 1 | 13.16 | 0.0046 ** | 5.68 | 1 | 10.49 | 0.0089 ** |
| X22 | 1.26 | 1 | 8.36 | 0.0161 * | 80.75 | 1 | 0.61 | 0.4542 | 1.89 | 1 | 3.50 | 0.0909 |
| X32 | 4.82 | 1 | 32.02 | 0.0002 ** | 1809.66 | 1 | 13.59 | 0.0042 ** | 0.028 | 1 | 0.052 | 0.8237 |
| Residual | 1.51 | 10 | 1331.74 | 10 | 5.41 | 10 | ||||||
| Lack of fit | 0.89 | 5 | 1.43 | 0.3522 | 1052.41 | 5 | 3.77 | 0.0859 | 4.49 | 5 | 4.83 | 0.0544 |
| Error | 0.62 | 5 | 279.33 | 5 | 0.93 | 5 | ||||||
| Sum | 22.96 | 19 | 9476.95 | 19 | 107.52 | 19 | ||||||
| Parameters | ec | e | ||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| NB | PB | PB | PM | PM | PS | ZO | ZO | |
| NM | PB | PB | PM | PS | PS | ZO | NS | |
| NS | PM | PM | PM | PS | ZO | NS | NS | |
| KP | ZO | PM | PM | PS | ZO | NS | NM | NM |
| PS | PS | PS | ZO | NS | NM | NM | NM | |
| PM | PS | ZO | NS | NM | NM | NM | NB | |
| PB | ZO | ZO | NM | NM | NB | NB | NB | |
| NB | NB | NB | NM | NM | NS | ZO | ZO | |
| NM | NB | NB | NM | NS | NS | ZO | ZO | |
| NS | NB | NM | NS | NS | ZO | PS | PS | |
| KI | ZO | NM | NM | NS | ZO | PS | PM | PM |
| PS | NM | NS | ZO | PS | PS | PM | PB | |
| PM | ZO | ZO | PS | PS | PM | PB | PB | |
| PB | ZO | ZO | PS | PM | PM | PB | PB | |
| NB | PS | NS | NB | NB | NB | NM | PS | |
| NM | PS | NS | NB | NM | NM | NS | ZO | |
| NS | ZO | NS | NM | NM | NS | NS | ZO | |
| KD | ZO | ZO | NS | NS | NS | NS | NM | ZO |
| PS | ZO | ZO | ZO | ZO | ZO | ZO | ZO | |
| PM | PB | NS | PS | PS | PS | PS | PB | |
| PB | PB | PM | PM | PM | PS | PS | PB | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Zeng, S.; Chen, X. Design and Experiment of Adaptive Profiling Header Based on Multi-Body Dynamics–Discrete Element Method Coupling. Agriculture 2024, 14, 105. https://doi.org/10.3390/agriculture14010105
Liu W, Zeng S, Chen X. Design and Experiment of Adaptive Profiling Header Based on Multi-Body Dynamics–Discrete Element Method Coupling. Agriculture. 2024; 14(1):105. https://doi.org/10.3390/agriculture14010105
Chicago/Turabian StyleLiu, Weijian, Shan Zeng, and Xuegeng Chen. 2024. "Design and Experiment of Adaptive Profiling Header Based on Multi-Body Dynamics–Discrete Element Method Coupling" Agriculture 14, no. 1: 105. https://doi.org/10.3390/agriculture14010105
APA StyleLiu, W., Zeng, S., & Chen, X. (2024). Design and Experiment of Adaptive Profiling Header Based on Multi-Body Dynamics–Discrete Element Method Coupling. Agriculture, 14(1), 105. https://doi.org/10.3390/agriculture14010105