



Unmanned Aerial Vehicle-Based Techniques for Monitoring and Prevention of Invasive Apple Snails (Pomacea canaliculata) in Rice Paddy Fields

Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Site
2.2. UAVs and Agricultural Drones
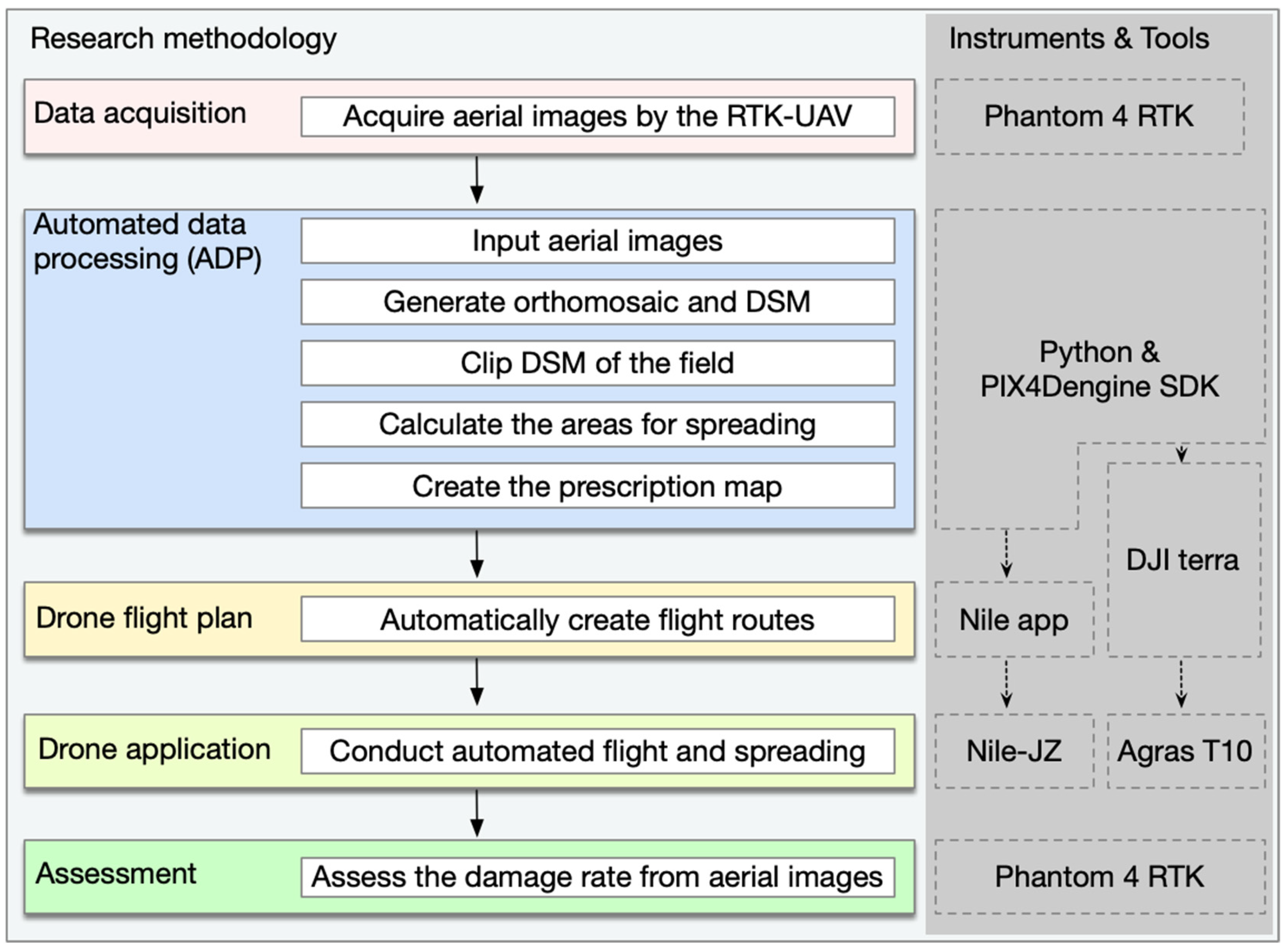
2.3. The Research Methodology
- Data acquisition, specifically for aerial images using the RTK-UAV.
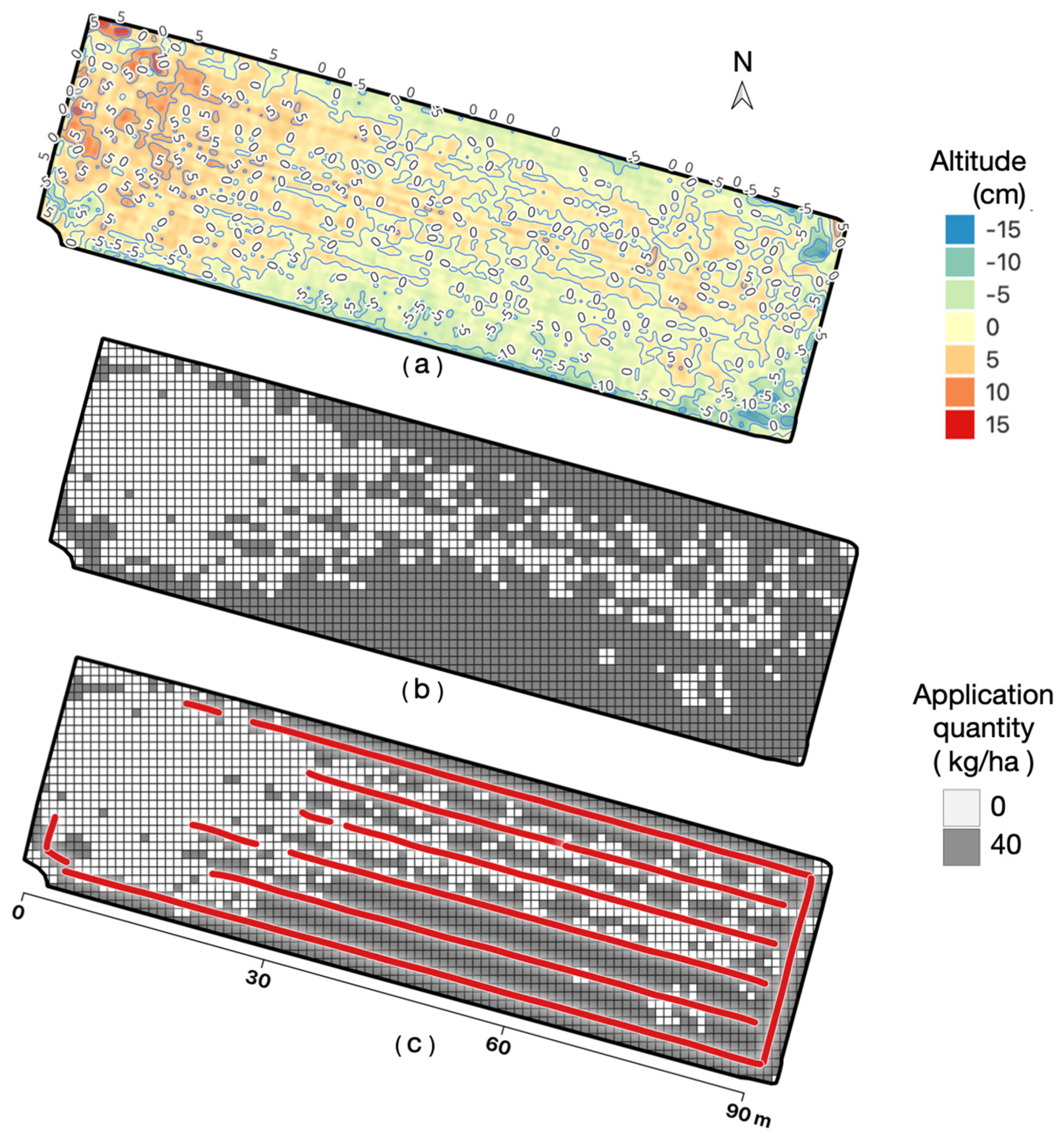
- Automated Data Processing (ADP), developed with the Python language and PIX4D engine SDK 1.4 [37]. This includes procedures such as inputting aerial images, generating orthomosaics and the DSM, clipping the DSM of the field, calculating the areas for spreading, and creating the prescription map. The DJI Terra software, not in the procedures for ADP, was used for creating the prescription map for Agras T10.
- Drone flight plan, automatically generated by the Nile app and DJI Terra for their corresponding drone models.
- Drone application, carried out by Nile-JZ or Agras T10.
- Assessment of the damage rate caused by P. canaliculata snails, determined from the aerial images acquired by the RTK-UAV.
| 01: | begin | |
| 02: | Set | |
| 03: | from within rice canopy regions | |
| 04: | from outside rice canopy regions | |
| 05: | using a GIS program or tool | |
| 06: | Assign the 97.5th percentile value of | |
| 07: | Assign the 97.5th percentile value of | |
| 08: | Assign the 2.5th percentile value of | |
| 09: | ||
| 10: | Calculate the 2.5th percentile value | |
| 11: | ||
| 12: | end | |
3. Results
3.1. Implementation of Site-Specific Drone Application
3.2. Effectiveness Analysis of Site-Specific Drone Application
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADP | Automated Data Processing |
| AGL | Above Ground Level |
| DSM | Digital Surface Model |
| GCP | Ground Control Point |
| GNSS | Global Navigation Satellite System |
| GSD | Ground Sample Distance |
| GNDVI | Green Normalized Difference Vegetation Index |
| LiDAR | Light Detection and Ranging |
| NDVI | Normalized Difference Vegetation Index |
| RTK | Real-Time Kinematic |
| TLS | Terrestrial Laser Scanning |
| UAV | Unmanned Aerial Vehicle |
| VR | Variable Rate |
References
- Lowe, S.; Browne, M.; Boudjelas, S.; De Poorter, M. 100 of the World’s Worst Invasive Alien Species: A Selection from the Global Invasive Species Database; Invasive Species Specialist Group: Auckland, New Zealand, 2000; Volume 12. [Google Scholar]
- CABI Digital Library. Pomacea canaliculata (Invasive Apple Snail). 2013. Available online: https://www.cabidigitallibrary.org/doi/10.1079/cabicompendium.68490 (accessed on 21 June 2023).
- Halwart, M. The golden apple snail Pomacea canaliculata in Asian rice farming systems: Present impact and future threat. Int. J. Pest Manag. 1994, 40, 199–206. [Google Scholar] [CrossRef]
- Chaichana, R.; Sumpan, T. The potential ecological impact of the exotic snail Pomacea canaliculata on the Thai native snail Pila scutata. Sci. Asia 2014, 40, 11–15. [Google Scholar] [CrossRef]
- Carlsson, N.; Kestrup, Å.; Mårtensson, M.; Nyström, P. Lethal and non-lethal effects of multiple indigenous predators on the invasive golden apple snail (Pomacea canaliculata). Freshw. Biol. 2004, 49, 1269–1279. [Google Scholar] [CrossRef]
- Carlsson, N.O.; Brönmark, C.; Hansson, L.A. Invading herbivory: The golden apple snail alters ecosystem functioning in Asian wetlands. Ecology 2004, 85, 1575–1580. [Google Scholar] [CrossRef]
- Joshi, R. Problems with the management of the golden apple snail Pomacea canaliculata: An important exotic pest of rice in Asia. In Area-Wide Control of Insect Pests: From Research to Field Implementation; Springer: Dordrecht, The Netherlands, 2007; pp. 257–264. [Google Scholar]
- Sin, T.S. Damage potential of the golden apple snail Pomacea canaliculata (Lamarck) in irrigated rice and its control by cultural approaches. Int. J. Pest Manag. 2003, 49, 49–55. [Google Scholar] [CrossRef]
- Wada, T.; Ichinose, K.; Higuchi, H. Effect of drainage on damage to direct-sown rice by the apple snail Pomacea canaliculata (Lamarck)(Gastropoda: Ampullariidae). Appl. Entomol. Zool. 1999, 34, 365–370. [Google Scholar] [CrossRef]
- Counce, P.A.; Keisling, T.C.; Mitchell, A.J. A uniform, objective, and adaptive system for expressing rice development. Crop Sci. 2000, 40, 436–443. [Google Scholar] [CrossRef]
- Takahashi, K.; Seki, M.; Nishida, H. Prevention of the Harm from Apple Snail with Rotary Cultivator. J. Jpn. Soc. Agric. Mach. 2002, 64, 101–107. [Google Scholar] [CrossRef]
- Takahashi, K.; Seki, M.; Higashi, S.; Miike, T. Development of Technology by Rotary Tiller to Control the Density of Apple Snail. J. Jpn. Soc. Agric. Mach. 2005, 67, 68–74. [Google Scholar] [CrossRef]
- Wada, T. Strategies for Controlling the Apple Snail Pomacea canaliculata (Lamarck) (Gastropoda: Ampullariidae) in Japanese Direct-Sown Paddy Fields. Jpn. Agric. Res. Q. JARQ 2004, 38, 75–80. [Google Scholar] [CrossRef]
- Makiyama, M.; Itoh, T. The Effects of Shallow Ponding Depth for Control of the Damage by Pomacea canaliculata. J. Agric. Eng. Soc. Jpn. 2005, 73, 793–796. [Google Scholar] [CrossRef]
- Kawakami, Y.; Furuta, T.; Nakagawa, H.; Kitamura, T.; Kurosawa, K.; Kogami, K.; Tajino, N.; Tanaka, M.S. Rice cultivation support system equipped with water-level sensor system. IFAC-PapersOnLine 2016, 49, 143–148. [Google Scholar] [CrossRef]
- Cruz, K.M.S.D.; Ella, V.B.; Suministrado, D.C.; Pereira, G.S.; Agulto, E.S. A Low-Cost Wireless Sensor for Real-Time Monitoring of Water Level in Lowland Rice Field under Alternate Wetting and Drying Irrigation. Water 2022, 14, 4128. [Google Scholar] [CrossRef]
- Osari, H. A method for assessing land leveling to produce high-quality consolidated paddy fields. Paddy Water Environ. 2003, 1, 35–41. [Google Scholar] [CrossRef]
- Yamaji, E. Standard and evaluation of paddy field consolidation. In Proceedings of the Soil and Water Engineering for Paddy Field Management, International Workshop, Bangkok, Thailand, 28–30 January 1992. [Google Scholar]
- Mora, O.E.; Suleiman, A.; Chen, J.; Pluta, D.; Okubo, M.H.; Josenhans, R. Comparing sUAS photogrammetrically-derived point clouds with GNSS measurements and terrestrial laser scanning for topographic mapping. Drones 2019, 3, 64. [Google Scholar] [CrossRef]
- Rivera, G.; Porras, R.; Florencia, R.; Sánchez-Solís, J.P. LiDAR applications in precision agriculture for cultivating crops: A review of recent advances. Comput. Electron. Agric. 2023, 207, 107737. [Google Scholar] [CrossRef]
- Ulvi, A. Documentation, Three-Dimensional (3D) Modelling and visualization of cultural heritage by using Unmanned Aerial Vehicle (UAV) photogrammetry and terrestrial laser scanners. Int. J. Remote Sens. 2021, 42, 1994–2021. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- ten Harkel, J.; Bartholomeus, H.; Kooistra, L. Biomass and crop height estimation of different crops using UAV-based LiDAR. Remote Sens. 2019, 12, 17. [Google Scholar] [CrossRef]
- Sofonia, J.; Shendryk, Y.; Phinn, S.; Roelfsema, C.; Kendoul, F.; Skocaj, D. Monitoring sugarcane growth response to varying nitrogen application rates: A comparison of UAV SLAM LiDAR and photogrammetry. Int. J. Appl. Earth Obs. 2019, 82, 101878. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Erkbol, H.; Adrian, J.; Newcomb, M.; LeBauer, D.; Pauli, D.; Shakoor, N.; Mockler, T. UAV-based sorghum growth monitoring: A comparative analysis of lidar and photogrammetry. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 3, 489–496. [Google Scholar] [CrossRef]
- Urban, R.; Reindl, T.; Brouček, J. Testing of drone DJI Phantom 4 RTK accuracy. In Advances and Trends in Geodesy, Cartography and Geoinformatics II; CRC Press: Boca Raton, FL, USA, 2020; pp. 99–105. [Google Scholar]
- Ekaso, D.; Nex, F.; Kerle, N. Accuracy assessment of real-time kinematics (RTK) measurements on unmanned aerial vehicles (UAV) for direct geo-referencing. Geo Spat. Inf. Sci. 2020, 23, 165–181. [Google Scholar] [CrossRef]
- Swinton, S.; Lowenberg-DeBoer, J. Evaluating the profitability of site-specific farming. J. Prod. Agric. 1998, 11, 439–446. [Google Scholar] [CrossRef]
- Bongiovanni, R.; Lowenberg-DeBoer, J. Precision agriculture and sustainability. Precis. Agric. 2004, 5, 359–387. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, W.; Krienke, B.; Cao, Q.; Zhu, Y.; Cao, W.; Liu, X. In-season variable rate nitrogen recommendation for wheat precision production supported by fixed-wing UAV imagery. Precis. Agric. 2022, 23, 830–853. [Google Scholar] [CrossRef]
- Pawase, P.P.; Nalawade, S.M.; Bhanage, G.B.; Walunj, A.A.; Kadam, P.B.; Durgude, A.G.; Patil, M.G. Variable rate fertilizer application technology for nutrient management: A review. Int. J. Agric. Biol. Eng. 2023, 16, 11–19. [Google Scholar] [CrossRef]
- Yi, L.; Lan, Y.; Kong, H.; Kong, F.; Huang, H.; Han, X. Exploring the potential of UAV imagery for variable rate spraying in cotton defoliation application. Int. J. Precis. Agric. Aviat. 2019, 2, 42–45. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Y.; Zhang, Z.; Han, L.; Li, Y.; Zhang, H.; Wongsuk, S.; Li, Y.; Wu, X.; He, X. Spray performance evaluation of a six-rotor unmanned aerial vehicle sprayer for pesticide application using an orchard operation mode in apple orchards. Pest Manag. Sci. 2022, 78, 2449–2466. [Google Scholar] [CrossRef]
- Yoshida, K.; Wada, T.; Matsukura, K.; Shiba, T. Potential overwintering areas of the alien apple snail, Pomacea canaliculata. Aquat. Invasions 2022, 17, 402–414. [Google Scholar] [CrossRef]
- Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W.; Marcial-Pablo, M.D.J.; Enciso, J. Digital terrain models generated with low-cost UAV photogrammetry: Methodology and accuracy. ISPRS Int. J. Geo-Inf. 2021, 10, 285. [Google Scholar] [CrossRef]
- Guan, S.; Takahashi, K.; Nakano, K.; Fukami, K.; Cho, W. Real-Time Kinematic Imagery-Based Automated Levelness Assessment System for Land Leveling. Agriculture 2023, 13, 657. [Google Scholar] [CrossRef]
- PIX4D. Pix4Dengine SDK Quick-Start; PIX4D S.A.: Prilly, Switzerland, 2019. [Google Scholar]
- GDAL/OGR Contributors. GDAL/OGR Geospatial Data Abstraction Software Library; Open Source Geospatial Foundation: Beaverton, OR, USA, 2021. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Paruelo, J.M.; Lauenroth, W.K.; Roset, P.A. Estimating aboveground plant biomass using a photographic technique. Rangel. Ecol. Manag./J. Range Manag. Arch. 2000, 53, 190–193. [Google Scholar] [CrossRef]
- Meyer, G.E.; Neto, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color indices for weed identification under various soil, residue, and lighting conditions. Trans. Asae 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Patrignani, A.; Ochsner, T.E. Canopeo: A powerful new tool for measuring fractional green canopy cover. Agron. J. 2015, 107, 2312–2320. [Google Scholar] [CrossRef]
- Song, C.; Zhou, Z.; Zang, Y.; Zhao, L.; Yang, W.; Luo, X.; Jiang, R.; Ming, R.; Zang, Y.; Zi, L.; et al. Variable-rate control system for UAV-based granular fertilizer spreader. Comput. Electron. Agric. 2021, 180, 105832. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | G1 | G2 | G3 | |||
|---|---|---|---|---|---|---|
| Field | F1 | F2 | F3 | F4 | F5 | F6 |
| Area (ha) | 0.49 | 0.26 | 0.26 | 0.33 | 1.18 | 0.33 |
| Latitude, longitude | 33.326974 N 130.398870 E | 33.326546 N 130.396180 E | 33.345911 N 130.399962 E | 33.346190 N 130.400063 E | 33.323753 N 130.376322 E | 33.319522 N 130.374446 E |
| Transplanting date | 26 June 2023 | 26 June 2023 | 24 June 2023 | 24 June 2023 | 22 June 2023 | 23 June 2023 |
| Timely treatment | drone application | - | drone application | - | drone application | - |
| Drone Model |  Nile-JZ |  Agras T10 |
|---|---|---|
| Target fields | F1 and F3 | F5 |
| Application date | 6 July 2023 | 29 June 2023 |
| Weather | Sunny | Shower |
| Wind speed (m/s) | 4.5 | 5 |
| Wind direction | SSE | SSW |
| Temperature (°) | 31.7 | 28.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, S.; Takahashi, K.; Watanabe, S.; Tanaka, K. Unmanned Aerial Vehicle-Based Techniques for Monitoring and Prevention of Invasive Apple Snails (Pomacea canaliculata) in Rice Paddy Fields. Agriculture 2024, 14, 299. https://doi.org/10.3390/agriculture14020299
Guan S, Takahashi K, Watanabe S, Tanaka K. Unmanned Aerial Vehicle-Based Techniques for Monitoring and Prevention of Invasive Apple Snails (Pomacea canaliculata) in Rice Paddy Fields. Agriculture. 2024; 14(2):299. https://doi.org/10.3390/agriculture14020299
Chicago/Turabian StyleGuan, Senlin, Kimiyasu Takahashi, Shunichiro Watanabe, and Katsunori Tanaka. 2024. "Unmanned Aerial Vehicle-Based Techniques for Monitoring and Prevention of Invasive Apple Snails (Pomacea canaliculata) in Rice Paddy Fields" Agriculture 14, no. 2: 299. https://doi.org/10.3390/agriculture14020299
APA StyleGuan, S., Takahashi, K., Watanabe, S., & Tanaka, K. (2024). Unmanned Aerial Vehicle-Based Techniques for Monitoring and Prevention of Invasive Apple Snails (Pomacea canaliculata) in Rice Paddy Fields. Agriculture, 14(2), 299. https://doi.org/10.3390/agriculture14020299