2.4.2. Establishment of Discrete Element Simulation Model
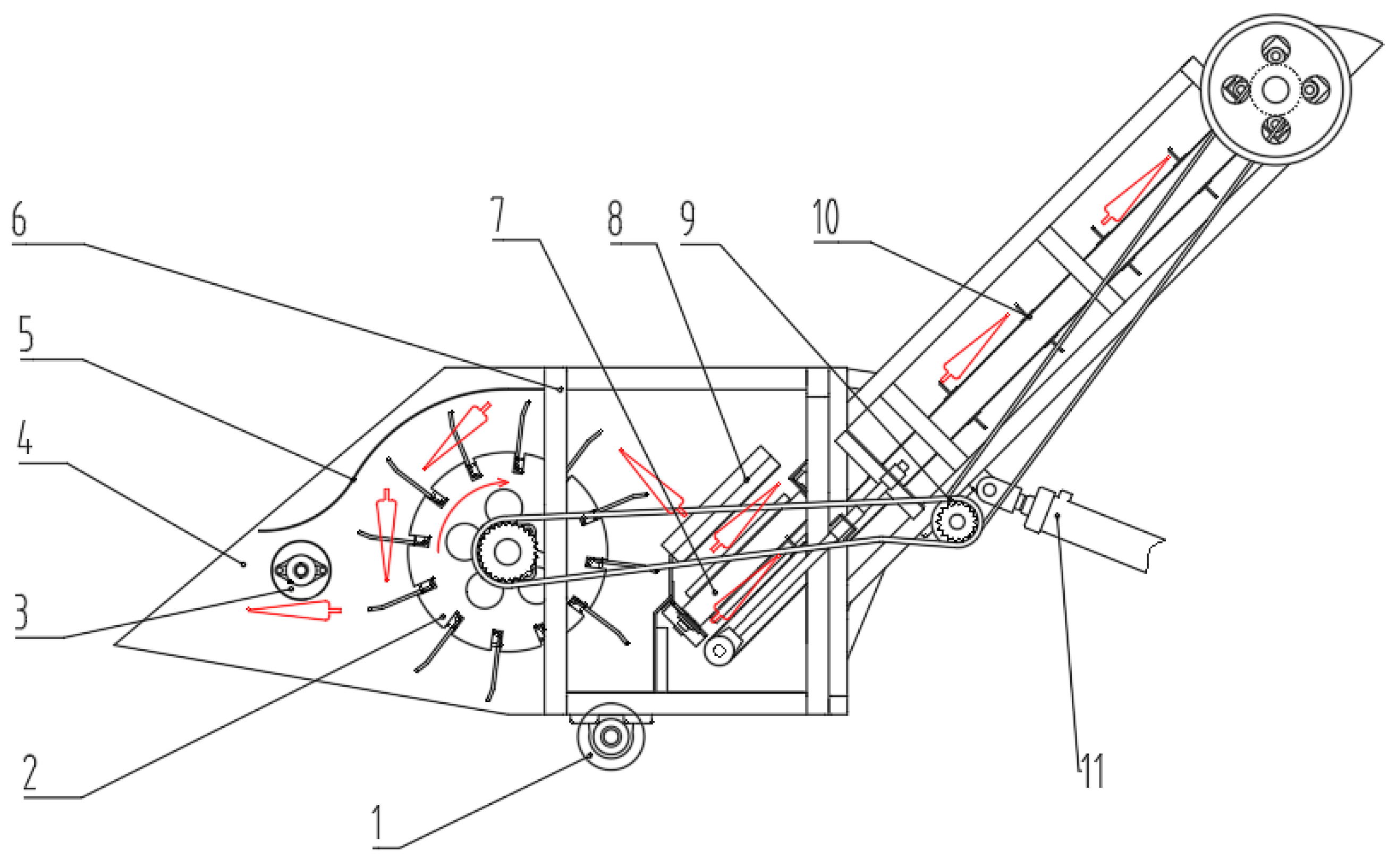
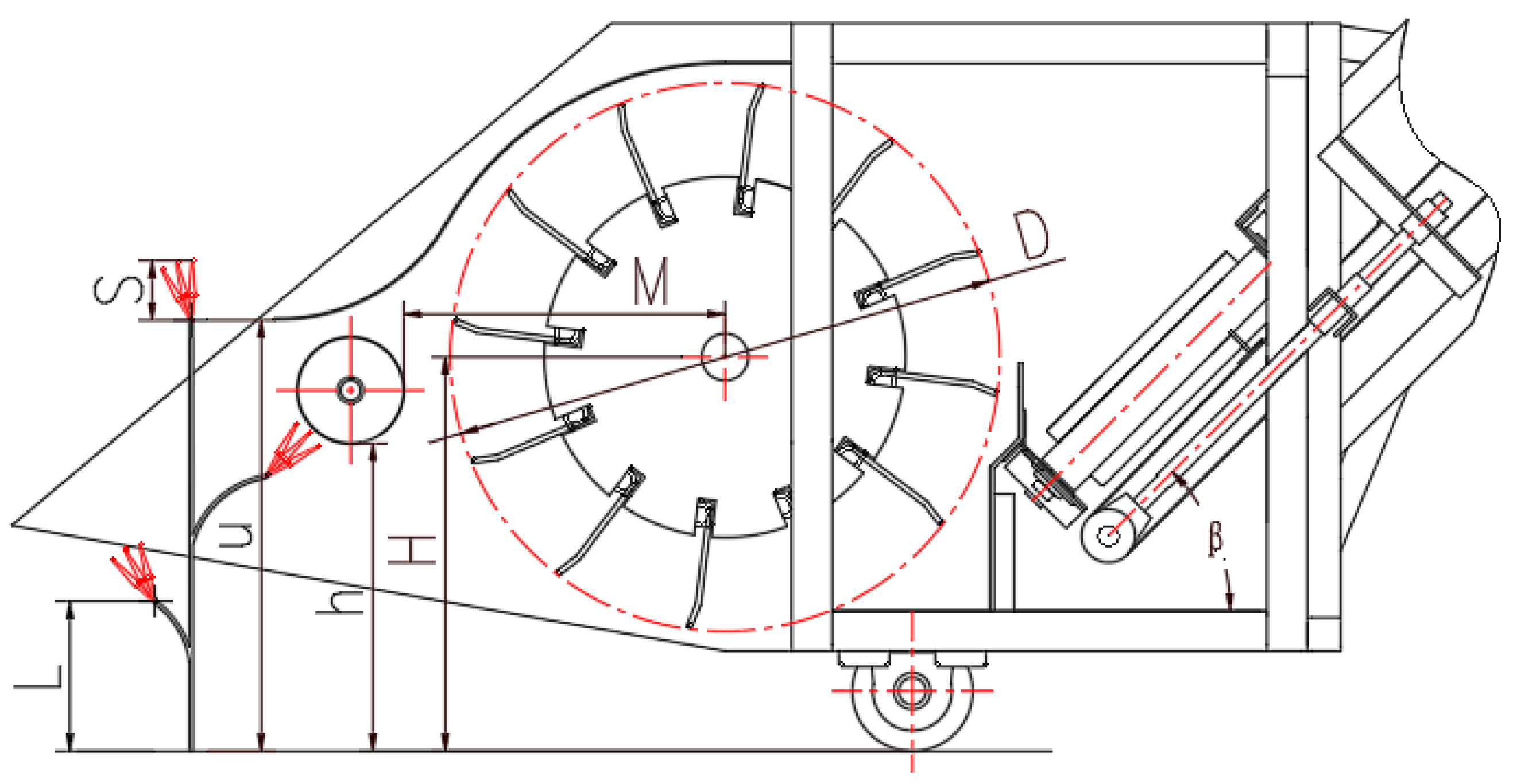
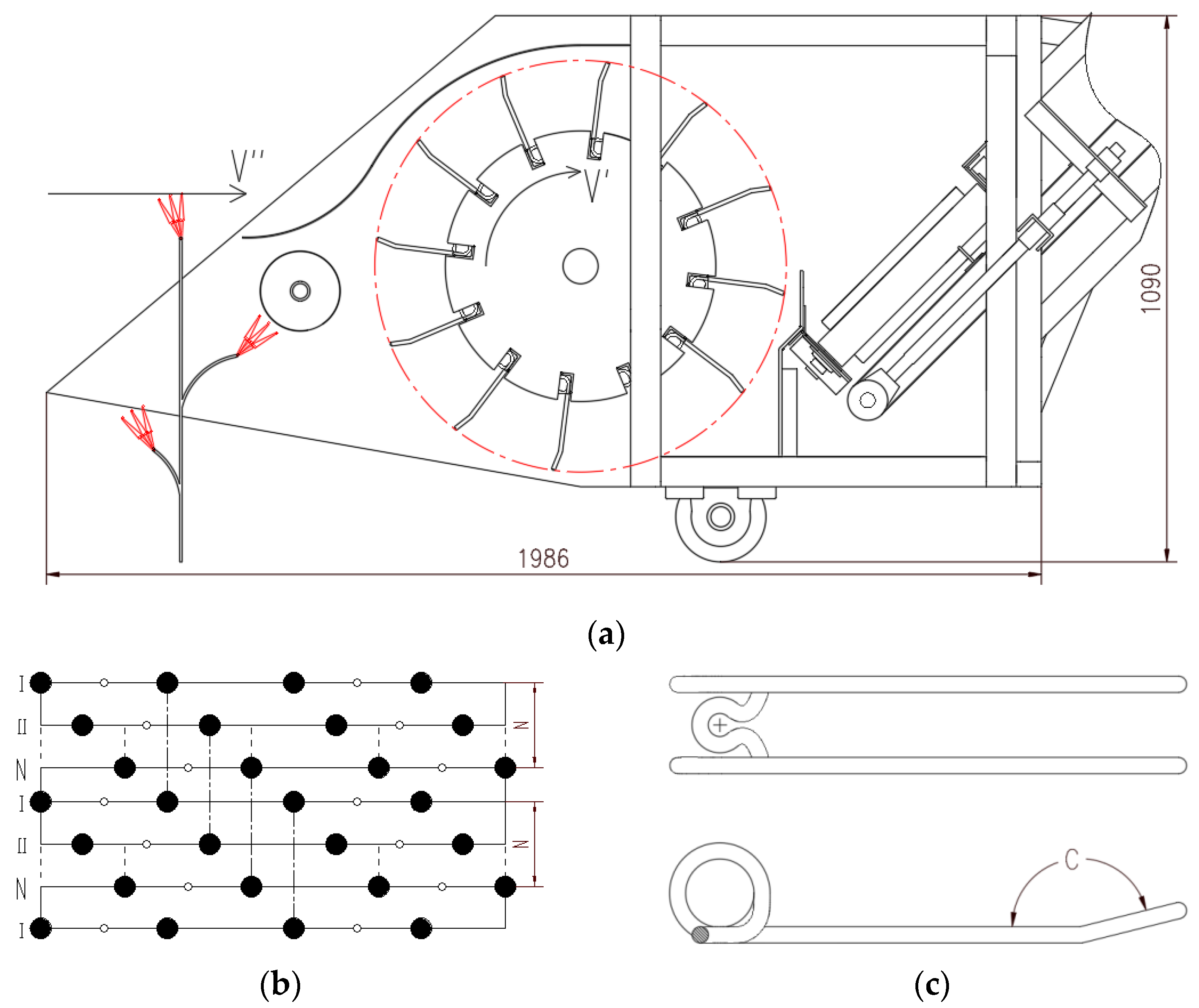
To reduce the simulation time, the width of the picking drum was reduced to 500 mm, and SolidWorks 2020 was used to build the three-dimensional model of the pepper-picking platform, as shown in
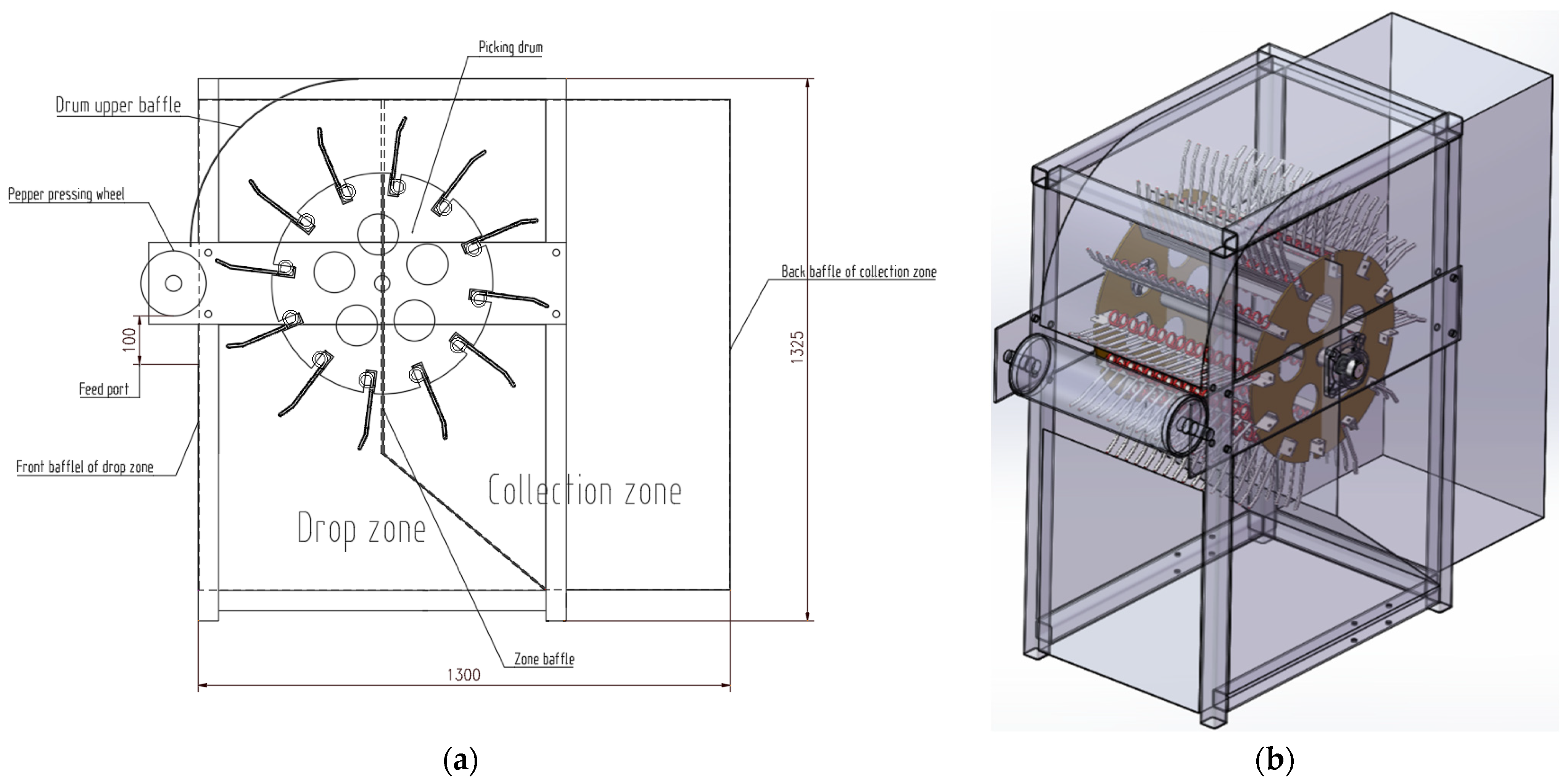
Figure 8. This model removes extraneous structures, but retains necessary components such as the pepper-pressing wheel, the upper baffle on the drum, and the picking drum. And on the original picking frame, the front baffle of the drop area, partition baffle, collection area baffle, and other closed baffles were added, and the internal space of the bench model was divided into “collection area” and “drop area”.
During the simulation, a large number of pepper pellets were randomly generated at the feed inlet (, rectangular area) on the left side of the bench model through the pellet factory, and a rightward horizontal feeding speed () was applied to these pellets. Under the picking action of the high-speed rotation of the picking drum, most of the pepper particles were thrown behind the bench model and fell to the “collection area” due to gravity, which was regarded as successful harvesting. A small number of unsuccessfully harvested peppers were blocked by the partition baffle and the front baffle of the drop area in the left half of the bench model, and finally fell to the “drop area”, which was regarded as a ground drop loss.
EDEM 2021.2 is a general-purpose CAE software based on the discrete element method for simulating the behavioral characteristics of granular systems of bulk materials. It defines and quickly performs dynamic analysis of bulk material systems. In the EDEM simulation, many discrete pepper particles were randomly generated at the feed port (rectangular plane) on the left side of the bench model through the particle factory, and a horizontal feeding speed to the right was applied to these pepper particles. Most of these pepper particles were thrown behind the bench under the high-speed rotation of the picking drum and fell to the “harvesting area” due to gravity, which was considered successful harvesting. A small number of unsuccessfully harvested peppers were blocked by the partition baffle and the front baffle of the drop area in the left half of the bench model, and finally fell to the “drop area”, which was regarded as a ground drop loss. Through multiple picking bench EDEM simulation pre-tests, it was found that EDEM can better meet the test requirements when dealing with the relative motion of the picking drum, partition baffle, and pepper particles.
EDEM 2021.2 was used to carry out the simulation experiment of the pepper-picking bench; the specific steps are mainly divided into three parts: pre-processor, solver, and post-processor. The pre-processing module can complete the establishment of the pod pepper discrete element model, the assignment of physical mechanics and contact attributes, pre-simulation preparations such as the import of the picking bench geometry, the generation of the particle factory, and the selection of the contact model. In the solver part, the setting of the Rayleigh time step for the solution, simulation time, data saving time interval, selection of the solver engine, start the simulation, etc., can be completed. After the simulation is over, the quantity or quality of peppercorns in the “drop zone” and “collection zone” can be visually monitored through the post-processing module, so as to obtain the drop loss rate of peppercorns in each simulation test.
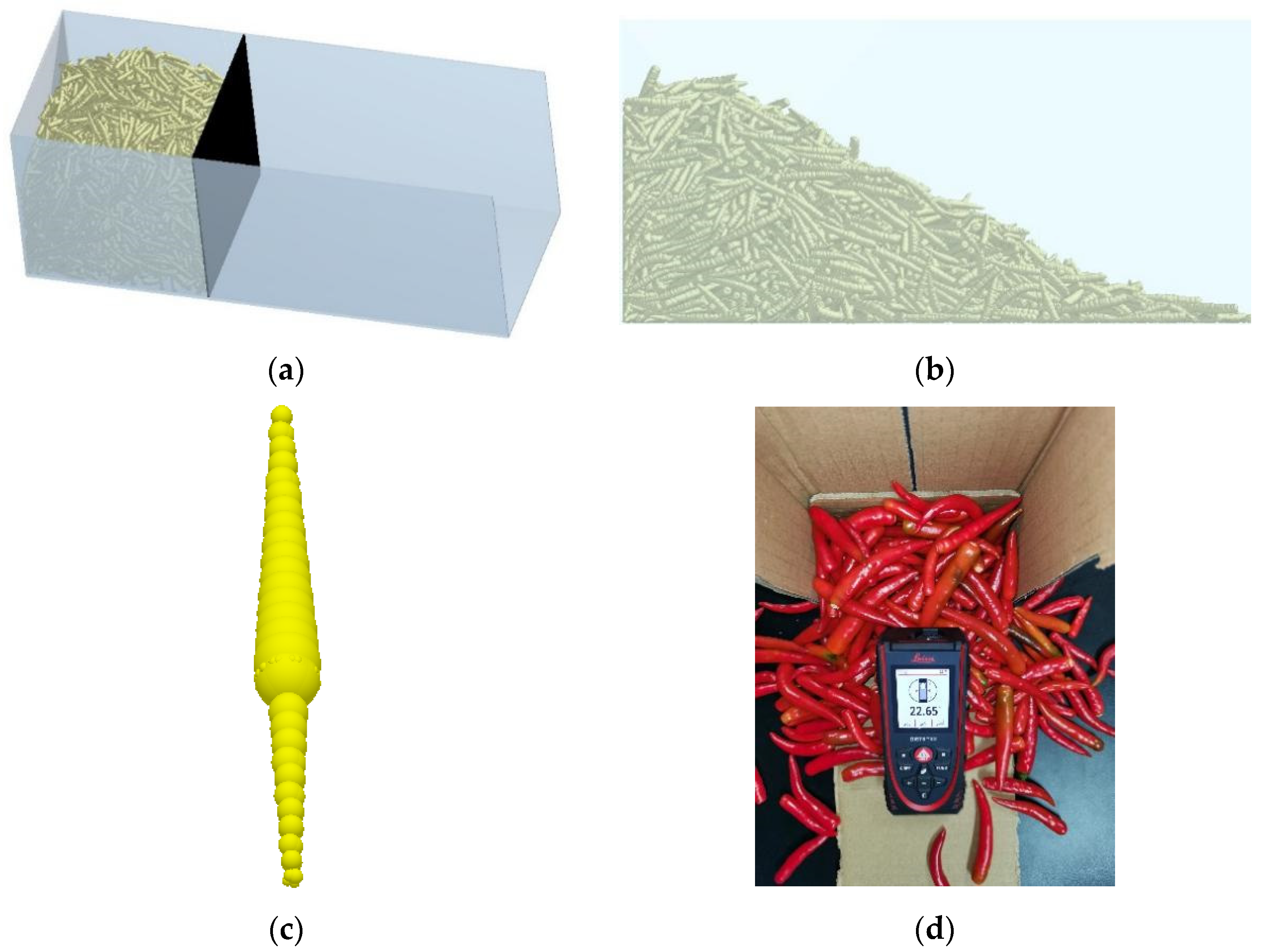
(1) Pre-treatment. Since the connection force between the short stem and the plant of pod pepper is much smaller than that of pod pepper at the fruiting force [
20], when picking rollers to harvest pepper, the fruit of the pepper is often picked together with the short stem (with the handle). Therefore, in the simulation process, it is proposed to establish an integrated discrete element model of pod pepper stem, and the physical and mechanical properties of the short stem were regarded as the same as those of pod pepper fruit. According to the 3D measurement data of pod pepper and short stem stalk, an integrated 3D model of pepper with handle was established, and it was imported into EDEM 2021.2 software as a particle filling template.
The 3D model of the pod-pepper-picking platform established above was imported into EDEM 2021.2 as geometries as well as the material properties of steel, and the contact properties between geometry and the pod pepper can be set. The merge function in geometry was used to fuse the picking drum parts into one drum geometry and merge the rest of the racks into another rack geometry, and add a clockwise linear rotation speed () around the drum axis to the drum. At the fixed position (−715, 324, 2315) at the feed inlet in front of the bench model, a virtual box geometry was established as a particle factory, and a total of 216 pod pepper particles with handles were randomly generated in a dynamic manner. Through the mass calculation function of EDEM, the total mass of the particles () is 373.7 g, which is less than the actual weight of 100 grains of pod pepper, which is 708.3 g. This is because the volume of the pod pepper model is larger than the actual volume in the process of 3D modeling and discrete element model particle filling was reduced. The feeding velocity is flat in the −X direction, and the number of hot peppers generated per second and the simulation time were dynamically adjusted in proportion to the size, so as to achieve the same feeding amount and feeding effect as the actual picking operation. In the actual picking process, the stress deformation and the huge picking movement speed and movement distance of pod pepper are relatively small, and have little impact on the picking results, and the main consideration index of the simulation process is the ground drop loss of pepper. The acceleration of gravity was set to in the Y direction.
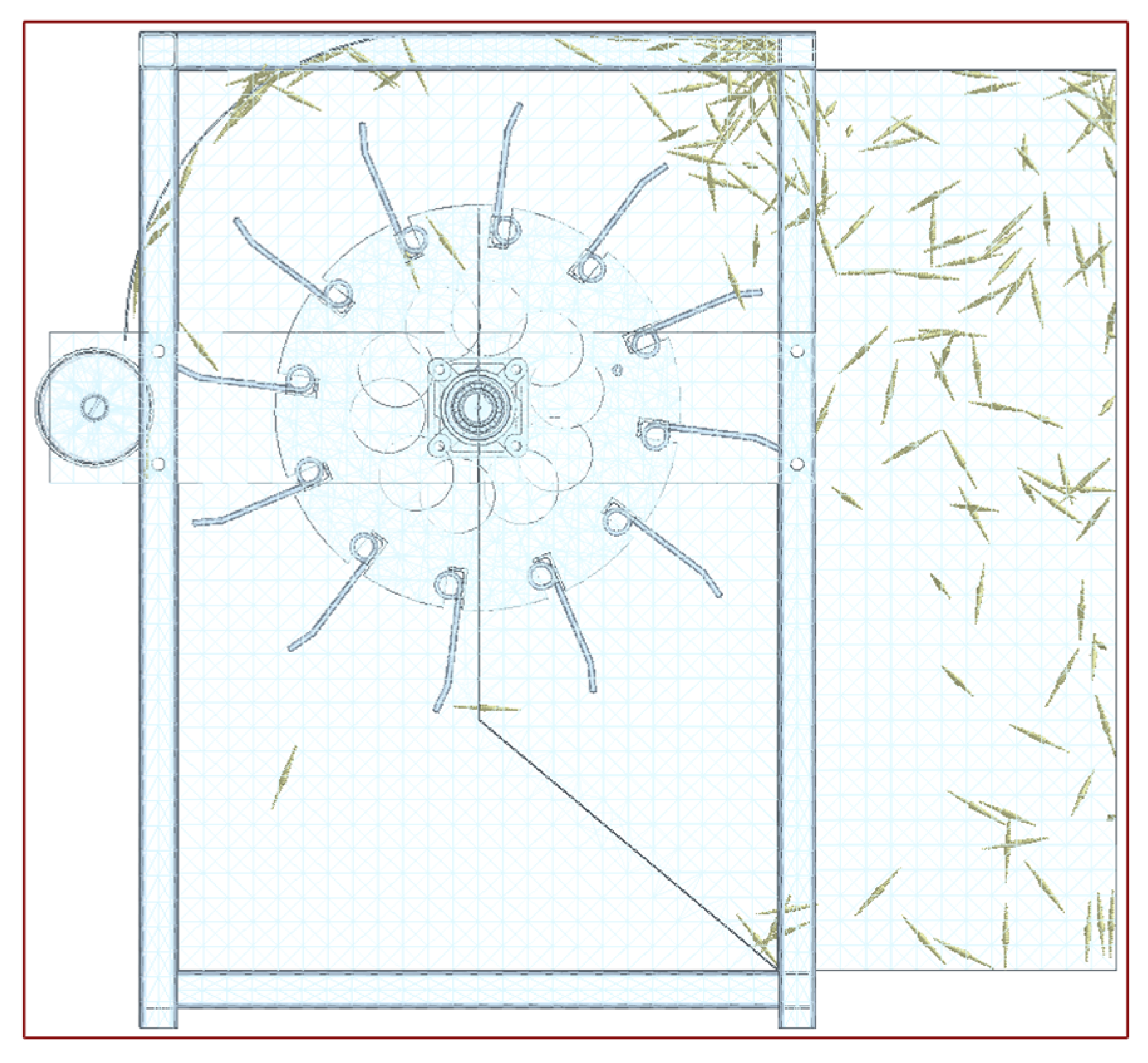
(2) Solver. The simulation fixed time step was set to 20% in the solver module, and the simulation time was dynamically adjusted to 2~4 s according to the feeding speed of pepper, so as to ensure that all pepper particles are generated and “harvested”. The cell size was set as 2.5 R, and the GPU solution engine was selected to speed up the solution. The schematic diagram of the simulation process of the pepper-picking platform is shown in
Figure 9.
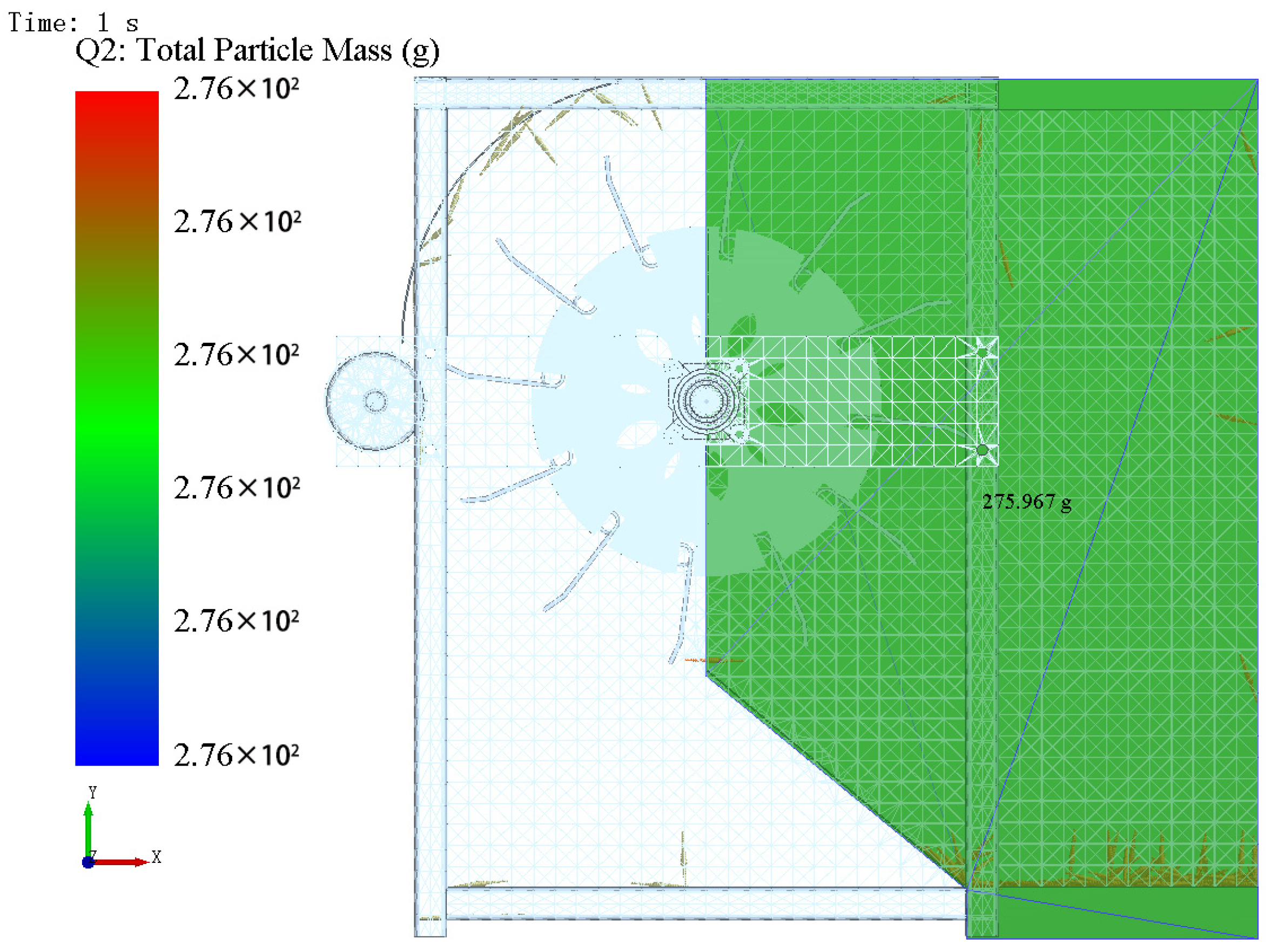
(3) Post-processing. After the simulation is completed, we switch to the post-processing module, and in the Setup Selections analysis function, import a Geometry Bin Group 3D model of the same size as the “collecting area” to monitor the quality of the harvested pod peppers, and adjust the model position coordinates so that it coincides with the “collection area”. As shown in
Figure 10, the monitoring item was set to the total mass of pod pepper in the Geometry Bin Group area, and this part of the mass (for example, shown in the figure is 275.967 g) is the mass of pod pepper successfully harvested during the simulation process, then the ground drop loss mass and ground drop loss rate of pod pepper in the simulation can be determined by Equation (8).
where
is the mass of pod pepper lost by ground drop in the simulation, g;
is the total mass of pod pepper fed in the simulation, 373.7 g;
is the mass of pod pepper successfully harvested in the simulation, g;
is the simulated nominal ground drop loss rate of pod pepper, %.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}