
Model Development for Off-Road Traction Control: A Linear Parameter-Varying Approach



Abstract
:1. Introduction
Contributions
2. Materials and Methods
2.1. Introduction to Linear Parameter-Varying Models
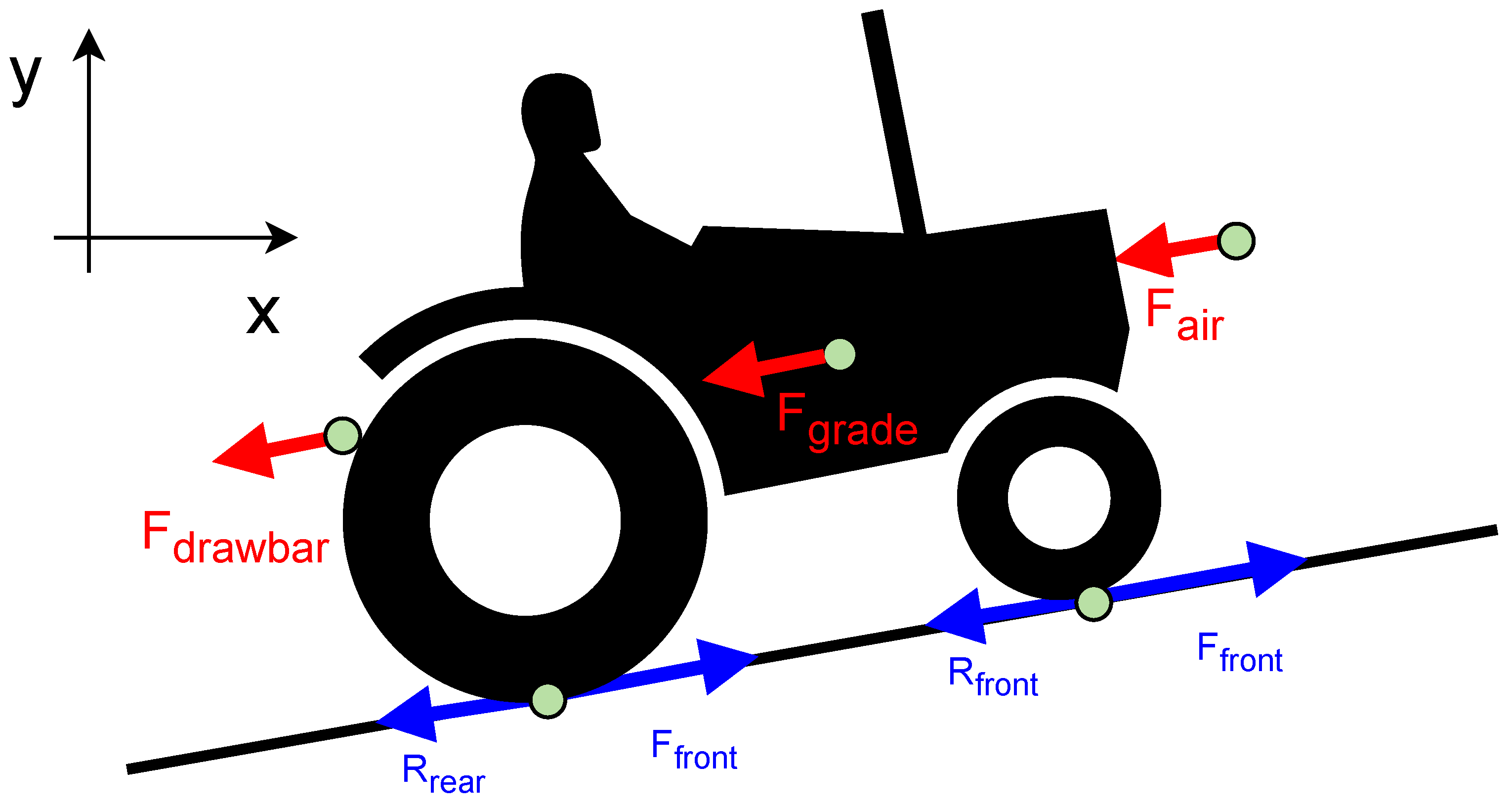
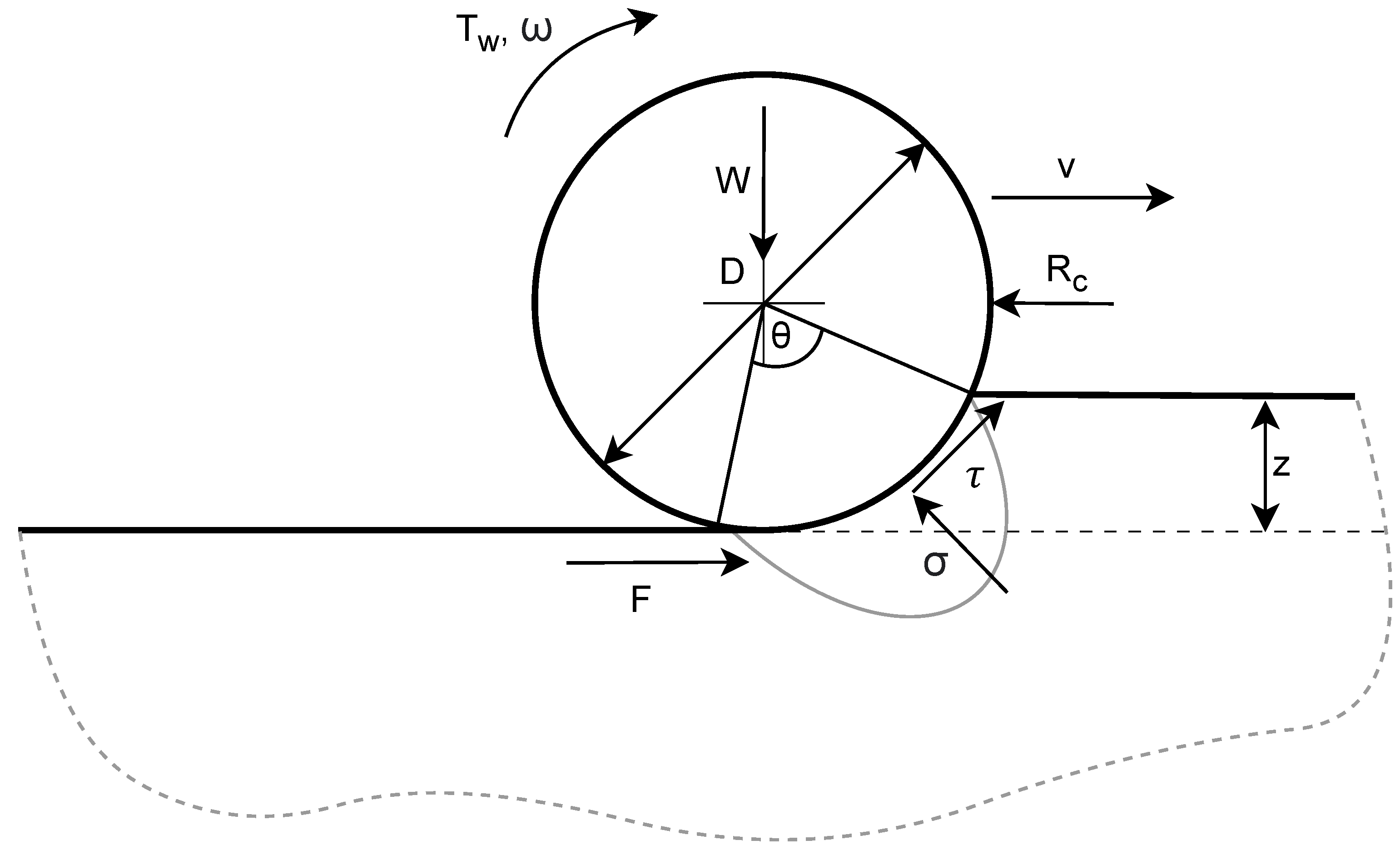
2.2. Model Development
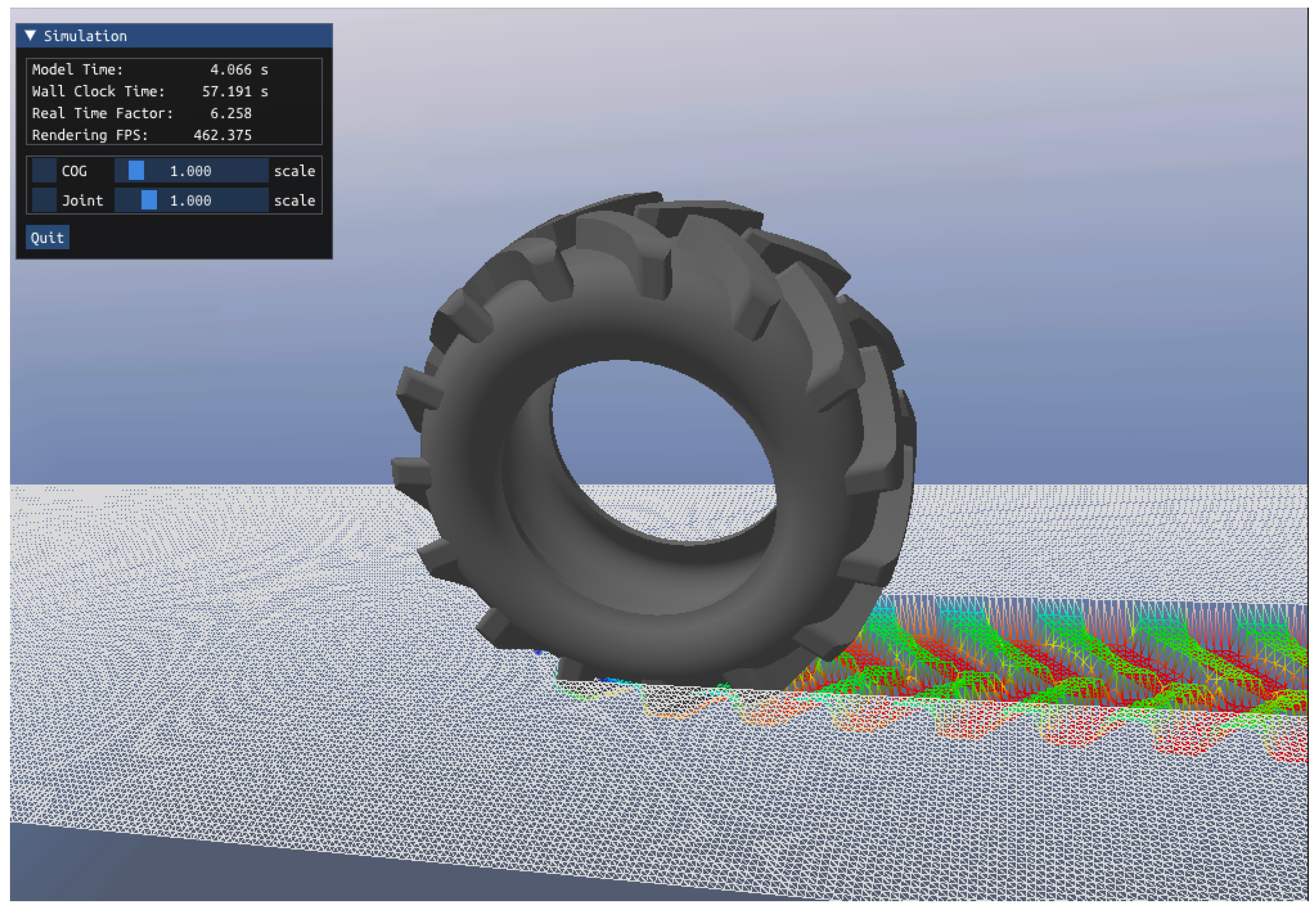
2.3. Implementation Details
- The actual state vector of the model;
- The model parameters (such as the wheel inertia, assumed to be constant);
- The inputs of the model over time;
- The actual scheduling parameter vector;
- The simulation time.
3. Results
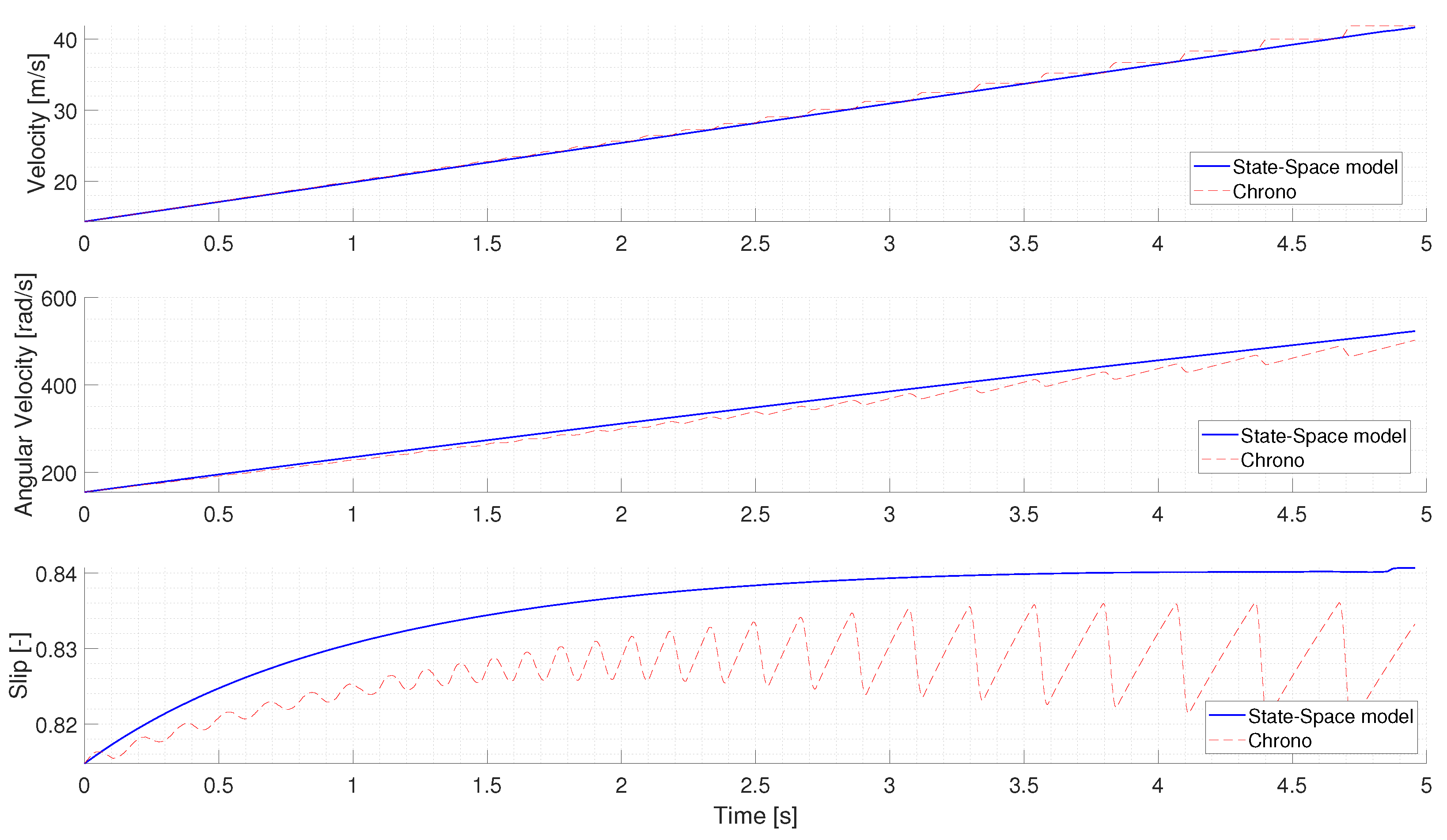
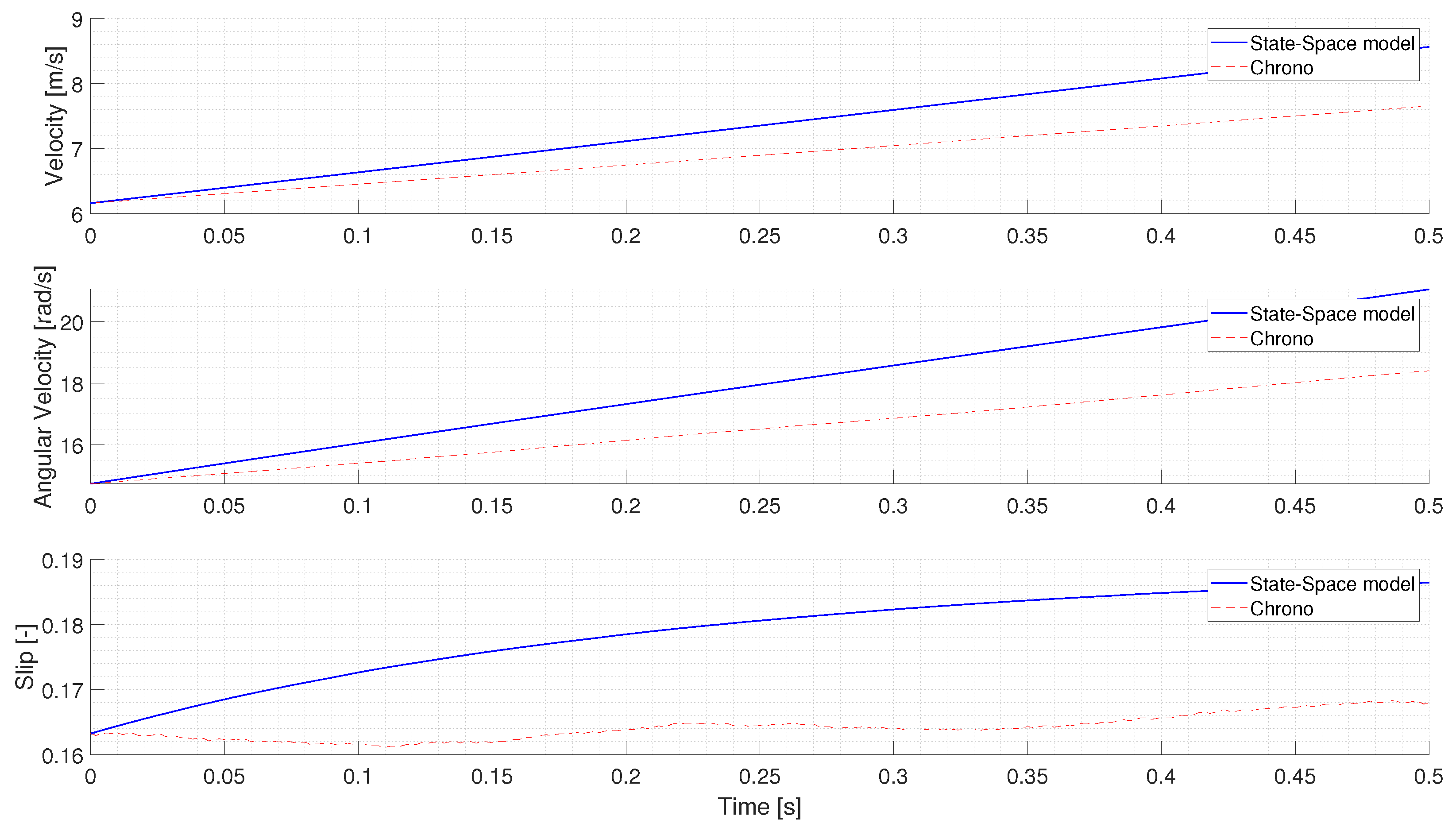
3.1. Simulation Results
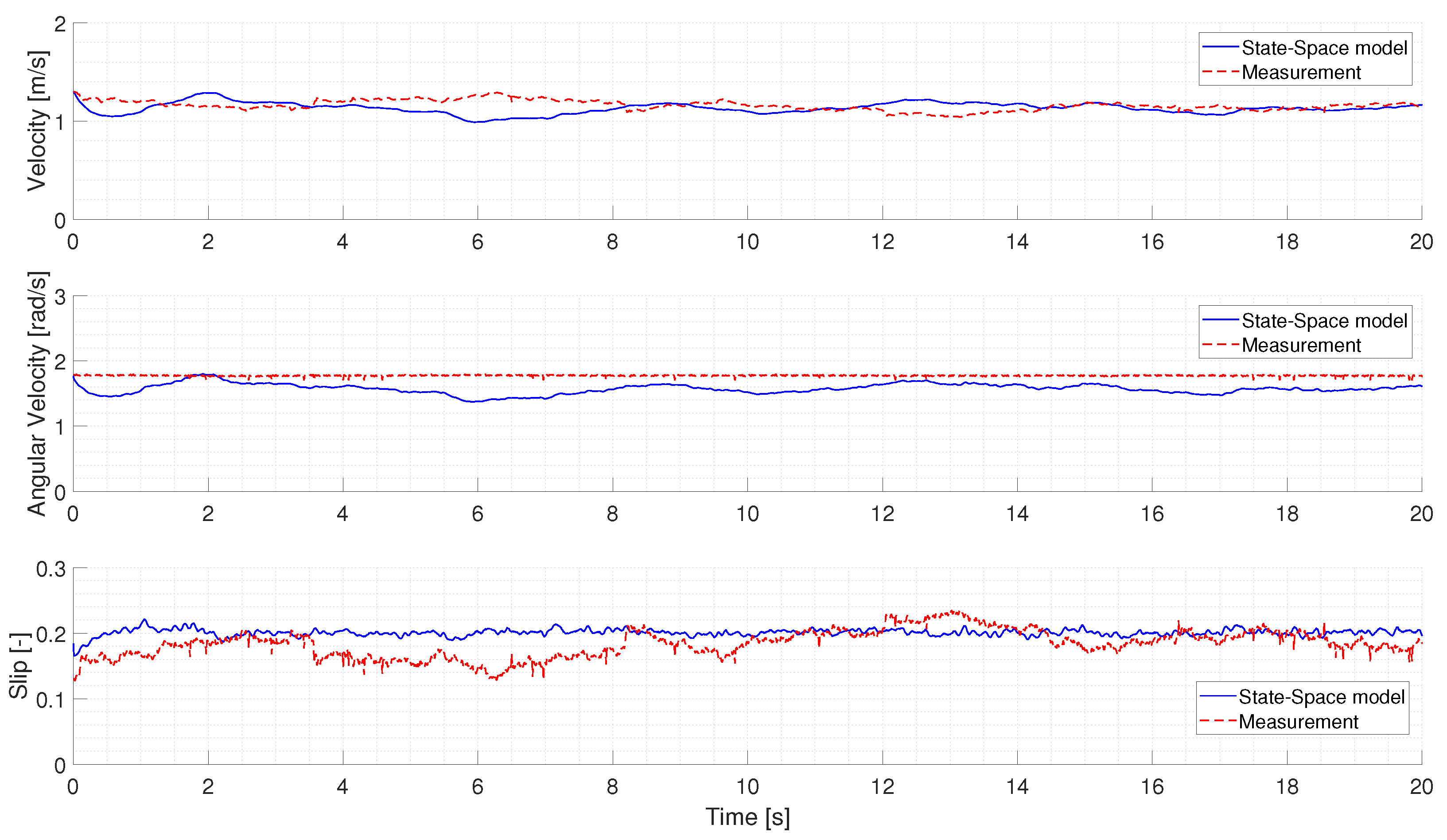
3.2. Experimental Measurements
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABS | Antilock Braking System |
| ACC | Adaptive Cruise Control |
| DAS | Driver Assistance System |
| DEM | Discrete Element Method |
| FEM | Finite Element Method |
| LFR | Linear Fractional Representation |
| LFT | Linear Fractional Transformation |
| LPV | Linear Parameter-Varying |
| qLPV | Quasi-Linear Parameter-Varying |
| SCM | Soil Contact Model |
References
- Sunusi, I.I.; Zhou, J.; Wang, Z.Z.; Sun, C.; Ibrahim, I.E.; Opiyo, S.; Soomro, S.A.; Korohou, T.; Soomro, S.A.; Olanrewaju, T. Intelligent tractors: Review of online traction control process. Comput. Electron. Agric. 2020, 170, 105176. [Google Scholar] [CrossRef]
- Luo, Z.; Wang, J.; Wu, J.; Zhang, S.; Chen, Z.; Xie, B. Research on a Hydraulic Cylinder Pressure Control Method for Efficient Traction Operation in Electro-Hydraulic Hitch System of Electric Tractors. Agriculture 2023, 13, 1555. [Google Scholar] [CrossRef]
- Stentz, A.; Dima, C.; Wellington, C.; Herman, H.; Stager, D. A system for semi-autonomous tractor operations. Auton. Robot. 2002, 13, 87–104. [Google Scholar] [CrossRef]
- Upadhyaya, S.; Wulfsohn, D. Traction prediction using soil parameters obtained with an instrumented analog device. J. Terramech. 1993, 30, 85–100. [Google Scholar] [CrossRef]
- Rubinstein, D.; Shmulevich, I.; Frenckel, N. Use of explicit finite-element formulation to predict the rolling radius and slip of an agricultural tire during travel over loose soil. J. Terramech. 2018, 80, 1–9. [Google Scholar] [CrossRef]
- Jiang, M.; Dai, Y.; Cui, L.; Xi, B. Experimental and DEM analyses on wheel-soil interaction. J. Terramech. 2018, 76, 15–28. [Google Scholar] [CrossRef]
- Wong, J.Y.; Reece, A. Prediction of rigid wheel performance based on the analysis of soil-wheel stresses part I. Performance of driven rigid wheels. J. Terramech. 1967, 4, 81–98. [Google Scholar] [CrossRef]
- He, R.; Sandu, C.; Khan, A.K.; Guthrie, A.G.; Els, P.S.; Hamersma, H.A. Review of terramechanics models and their applicability to real-time applications. J. Terramech. 2019, 81, 3–22. [Google Scholar] [CrossRef]
- Johnson, D.K.; Botha, T.R.; Els, P.S. Real-time side-slip angle measurements using digital image correlation. J. Terramech. 2019, 81, 35–42. [Google Scholar] [CrossRef]
- Linström, B.V.; Els, P.S.; Botha, T. A real-time non-linear vehicle preview model. Int. J. Heavy Veh. Syst. 2018, 25, 1–22. [Google Scholar] [CrossRef]
- Sandu, C.; Kolansky, J.; Botha, T.; Els, S. 6.3. Multibody Dynamics Techniques for Real-Time Parameter Estimation. Adv. Auton. Veh. Des. Sev. Environ. 2015, 44, 221. [Google Scholar]
- Vieira, D.; Orjuela, R.; Spisser, M.; Basset, M. An adapted Burckhardt tire model for off-road vehicle applications. J. Terramech. 2022, 104, 15–24. [Google Scholar] [CrossRef]
- Lenain, R.; Thuilot, B.; Cariou, C.; Martinet, P. High accuracy path tracking for vehicles in presence of sliding: Application to farm vehicle automatic guidance for agricultural tasks. Auton. Robot. 2006, 21, 79–97. [Google Scholar] [CrossRef]
- Cariou, C.; Lenain, R.; Thuilot, B.; Berducat, M. Automatic guidance of a four-wheel-steering mobile robot for accurate field operations. J. Field Robot. 2009, 26, 504–518. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Traction-energy balancing adaptive control with slip optimization for wheeled robots on rough terrain. Cogn. Syst. Res. 2018, 49, 142–156. [Google Scholar] [CrossRef]
- Salama, M.A.; Vantsevich, V.V.; Way, T.R.; Gorsich, D.J. UGV with a distributed electric driveline: Controlling for maximum slip energy efficiency on stochastic terrain. J. Terramech. 2018, 79, 41–57. [Google Scholar] [CrossRef]
- Pacejka, H.B.; Besselink, I.J.M. Magic Formula Tyre Model with Transient Properties. Veh. Syst. Dyn. 1997, 27, 234–249. [Google Scholar] [CrossRef]
- Alexander, A.; Sciancalepore, A.; Vacca, A. Online Controller Setpoint Optimization for Traction Control Systems Applied to Construction Machinery. In Proceedings of the BATH/ASME 2018 Symposium on Fluid Power and Motion Control, Bath, UK, 12–14 September 2018; p. V001T01A068. [Google Scholar] [CrossRef]
- Saunders, A.; White, D.; Compere, M. Estimating Pacejka (PAC2002) Tire Coefficients for Pneumatic Tires on Soft Soils With Application to BAJA SAE Vehicles. In Proceedings of the ASME 2019 International Mechanical Engineering Congress and Exposition, Salt Lake City, UT, USA, 11–14 November 2019; Volume 59414, p. V004T05A081. [Google Scholar]
- Vieira, D.; Orjuela, R.; Spisser, M.; Basset, M. Longitudinal Vehicle Control based on Off-road Tire Model for Soft Soil Applications. IFAC-PapersOnLine 2021, 54, 304–309. [Google Scholar] [CrossRef]
- Gaspar, P.; Szaszi, I.; Bokor, J. Active Suspension Design using LPV Control. IFAC Proc. Vol. 2004, 37, 565–570. [Google Scholar] [CrossRef]
- Poussot-Vassal, C.; Sename, O.; Dugard, L.; Gáspár, P.; Szabó, Z.; Bokor, J. A new semi-active suspension control strategy through LPV technique. Control Eng. Pract. 2008, 16, 1519–1534. [Google Scholar] [CrossRef]
- Németh, B. Robust LPV design with neural network for the steering control of autonomous vehicles. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 4134–4139. [Google Scholar]
- Németh, B.; Gáspár, P.; Orjuela, R.; Basset, M. LPV-based Control Design of an Adaptive Cruise Control System for Road Vehicles. IFAC-PapersOnLine 2015, 48, 62–67. [Google Scholar] [CrossRef]
- Vu, V.T.; Sename, O.; Dugard, L.; Gaspar, P. The Design of an H∞/LPV Active Braking Control to Improve Vehicle Roll Stability. IFAC-PapersOnLine 2019, 52, 54–59. [Google Scholar] [CrossRef]
- Gáspár, P.; Németh, B.; Bokor, J. Design of an LPV-based integrated control for driver assistance systems. IFAC Proc. Vol. 2012, 45, 511–516. [Google Scholar] [CrossRef]
- Gáspár, P.; Szabó, Z.; Bokor, J. LPV design of adaptive integrated control for road vehicles. IFAC Proc. Vol. 2011, 44, 662–667. [Google Scholar] [CrossRef]
- Li, J.; Sun, S.; Sun, C.; Liu, C.; Tang, W.; Wang, H. Analysis of Effect of Grouser Height on Tractive Performance of Tracked Vehicle under Different Moisture Contents in Paddy Soil. Agriculture 2022, 12, 1581. [Google Scholar] [CrossRef]
- Wong, J.Y. Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and Design; Butterworth-Heinemann: Oxford, UK, 2009. [Google Scholar]
- Bekker, M.G. Theory of Land Locomotion; University of Michigan Press: Ann Arbor, MI, USA, 1956. [Google Scholar]
- Bernstein, R. Probleme zur experimentellen Motorpflugmechanik. Der Mot. 1913, 16, 199–206. [Google Scholar]
- Bekker, M.G. Introduction to Terrain-Vehicle Systems. Part I: The Terrain. Part II: The Vehicle; University of Michigan Press: Ann Arbor, MI, USA, 1969. [Google Scholar]
- Janosi, Z. The Analytical Determination of Drawbar Pull as A Function of Slip for Tracked Vehicles in Deformable Soils. In Proceedings of the International Society for Terrain-Vehicle Systems, The 1st International Conference, Turin, Italy, 1961; Volume 707. [Google Scholar]
- El Hariri, A.; Ahmed, A.E.E.; Kiss, P. Sandy Loam Soil Shear Strength Parameters and Its Colour. Appl. Sci. 2023, 13, 3847. [Google Scholar] [CrossRef]
- Iagnemma, K.; Shibly, H.; Dubowsky, S. On-line terrain parameter estimation for planetary rovers. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 3, pp. 3142–3147. [Google Scholar]
- Iagnemma, K.; Kang, S.; Brooks, C.; Dubowsky, S. Multi-sensor terrain estimation for planetary rovers. In Proceedings of the 8th International Symposium on Artificial Intelligence, Robotics, and Automation in Space, Nara, Japan, 19–23 May 2003. [Google Scholar]
- Tasora, A.; Serban, R.; Mazhar, H.; Pazouki, A.; Melanz, D.; Fleischmann, J.; Taylor, M.; Sugiyama, H.; Negrut, D. Chrono: An Open Source Multi-Physics Dynamics Engine; Springer: Berlin/Heidelberg, Germany, 2016; pp. 19–49. [Google Scholar]
- Krenn, R.; Hirzinger, G. SCM–A soil contact model for multi-body system simulations. In Proceedings of the 11th European Regional Conference of the International Society for Terrain-Vehicle Systems, Bremen, Germany, 5–8 October 2009. [Google Scholar]
- Kiss, P.; Laib, L. Tractor energy balance under instationary conditions: 6th Mini Conference on Vehicle System Dynamics, Identification and Anomalies (VSDIA’98). In Proceedings of the 6th Mini Conference on Vehicle System Dynamics, Identification and Anomalies, VSDIA’98, Budapest, Hungary, 9–11 November 1998; pp. 407–414. [Google Scholar]
- Kiss, P. Effect of Soil Deformation on the Energy Balance of Tractors. Hung. Agric. Eng. 1999, 12, 35–39. [Google Scholar]
- Jia, F.; Liu, Z. A LPV traction control approach for independent in-wheel electric motor vehicle. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 1992–1997. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terrain parameters | Sinkage coefficient [-] | 1.1 |
| Cohesion [Pa] | 0 | |
| Shear deformation modulus [m] | 0.01 | |
| Friction angle [°] | 30 | |
| Contact area [m2] | 0.224 | |
| Vehicle parameters | Wheel inertia [kgm2] | 20 |
| Vehicle mass [kg] | 500 | |
| Wheel width [m] | 0.4 | |
| Wheel radius [m] | 0.5 |
| Terrain parameters | Sinkage coefficient [-] | 0.85 |
| Cohesion [Pa] | 2200 | |
| Shear deformation modulus [m] | 0.08 | |
| Friction angle [°] | 30 | |
| Contact area [m2] | 0.224 | |
| Vehicle parameters | Wheel inertia [kgm2] | 20 |
| Vehicle mass [kg] | 1662.5 | |
| Wheel width [m] | 0.46 | |
| Wheel radius [m] | 0.9 |
| High-Slip Simulation | Low-Slip Simulation | Measurement | ||
|---|---|---|---|---|
| Velocity [m/s] | Max | 1.406 | 0.908 | 0.283 |
| Mean | 0.314 | 0.456 | 0.075 | |
| Angular velocity [rad/s] | Max | 40.631 | 2.650 | 0.423 |
| Mean | 14.706 | 1.416 | 0.202 | |
| Slip [-] | Max | 0.02 | 0.019 | 0.076 |
| Mean | 0.008 | 0.015 | 0.022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szabo, A.; Doba, D.K.; Aradi, S.; Kiss, P. Model Development for Off-Road Traction Control: A Linear Parameter-Varying Approach. Agriculture 2024, 14, 499. https://doi.org/10.3390/agriculture14030499
Szabo A, Doba DK, Aradi S, Kiss P. Model Development for Off-Road Traction Control: A Linear Parameter-Varying Approach. Agriculture. 2024; 14(3):499. https://doi.org/10.3390/agriculture14030499
Chicago/Turabian StyleSzabo, Adam, Daniel Karoly Doba, Szilard Aradi, and Peter Kiss. 2024. "Model Development for Off-Road Traction Control: A Linear Parameter-Varying Approach" Agriculture 14, no. 3: 499. https://doi.org/10.3390/agriculture14030499
APA StyleSzabo, A., Doba, D. K., Aradi, S., & Kiss, P. (2024). Model Development for Off-Road Traction Control: A Linear Parameter-Varying Approach. Agriculture, 14(3), 499. https://doi.org/10.3390/agriculture14030499