1. Introduction
The sugarcane industry is an important sector in the Chinese national economy, and achieving automated production is fundamental to its development. The sugarcane harvester plays a crucial role in the automation of the sugarcane industry. The future development direction of sugarcane harvesters lies in informatization, precision, and intelligence [
1]. By relying on information technologies such as sensors, remote control, and GPS, dynamic coordination and management of sugarcane harvesting operations can be achieved, thereby improving harvesting efficiency [
2,
3]. The newly introduced sugarcane harvesters in the market are equipped with a central control display in the driver’s cabin, primarily used to display various parameter indicators and vehicle condition information of the harvester, as well as to set and adjust certain mechanical parameters. Technical progress has resulted in a heightened level of complexity in agricultural machines and devices [
4]. During the sugarcane harvesting process, the control of the harvester, including driving maneuvering, operation regulation, and adjustment of entertainment facilities, is still conducted through physical means. In the course of field visits, it was observed that the sugarcane harvester has complex functions, cumbersome operations, multiple controllers, and unclear operational logic, often resulting in high cognitive load for the driver, increased learning costs, and work fatigue.
In traditional agricultural machinery, the operation parameters are displayed on the instrument panel in the driver’s cabin. However, an increasing number of agricultural machinery cabins are now equipped with touch screens to display relevant parameter information. With this new type of human machine interface, operators can simply touch the screen menu to select various terminal information within the unit [
5], effectively reducing manual labor and improving operational efficiency [
6]. Against the backdrop of global development in agricultural machinery automation, the shift from fully mechanical interaction to more intuitive and effortless touch screen interaction in sugarcane harvesters’ cabins is an inevitable trend. However, current research on the interaction in agricultural machinery cabins primarily focuses on the physical interface, such as the arrangement and size of displays and controllers, the relationship between human body dimensions and structural points, as well as the design of form features, such as shape, graphics, materials, and colors [
7,
8,
9,
10,
11]. For instance, Zhang Jianmin and Fu Jun combined human machine interaction cognition with the driver’s operational habits and used JACK simulation analysis software to optimize the layout of instruments, buttons, and steering wheels in tractor cabins [
12]. Currently, there is limited attention given to new interactive methods for operating large and medium-sized agricultural machinery cabins, both domestically and internationally.
In the field of intelligent vehicles, there has been extensive research on the control methods of utilizing a central control screen for partial secondary driving tasks, and these methods are gradually being applied [
13]. Compared to methods of mechanical manipulation that require direct touch, touch screen control loses the tactile feedback and familiarity delivered through the sense of touch, and in a moving car driving environment, the driver’s attention must be focused on driving the car safely with limited visual resources allocated to secondary tasks, so touch screen control has to reduce the driver’s visual dependence [
14]. Studies by Holmen and Zadeh indicated that haptic feedback can replace visual feedback to some extent by studying the effect of different haptic feedback on the driver’s accuracy in adjusting the window height during car window adjustment [
15]. Similar research was done by Rümelin and Butz, who concluded that a programmable touch sense might increase the efficiency of driver tasks connected to the touch screen while driving, reducing driver distraction and enhancing driving safety [
16]. Some studies have shown that the interaction will take up a significant amount of the driver’s visual attention and the accurate click rate on the touch screen will fall significantly in poor road conditions. The operation time will also increase [
17,
18]. Ahmad et al. evaluated the ease of use and input performance of automotive touch screens under different road conditions [
19]. It was shown that the ease of use of the car’s in-vehicle interactive display will be affected when driving is disturbed by road inequalities. Stein et al. suggested the effects of parameters such as frequency, amplitude, rhythm, roughness, and duration on the effect of haptic feedback and made design recommendations for the setting of relevant parameters in touch screen design [
20].
On the other hand, research on user experience based human machine interfaces in intelligent automotive driving cabins also provides references for the study of new interaction methods in agricultural machinery cabins. Hao et al. explored the design principles of modeling forms of instrument panels to shared vehicles and demonstrated that SD-AIO panels (the panel of symmetrical driver-oriented layout with an all-in-one type screen) are effective in reducing user tension while performing driving tasks and secondary tasks, promoting sustainable interactions with high traffic efficiency and good user experience [
21]. Li et al. investigated the interface layout of two types of in-vehicle information systems and found that hierarchical and checkerboard layouts have different effects on ease of use and driving safety at different speeds [
22].
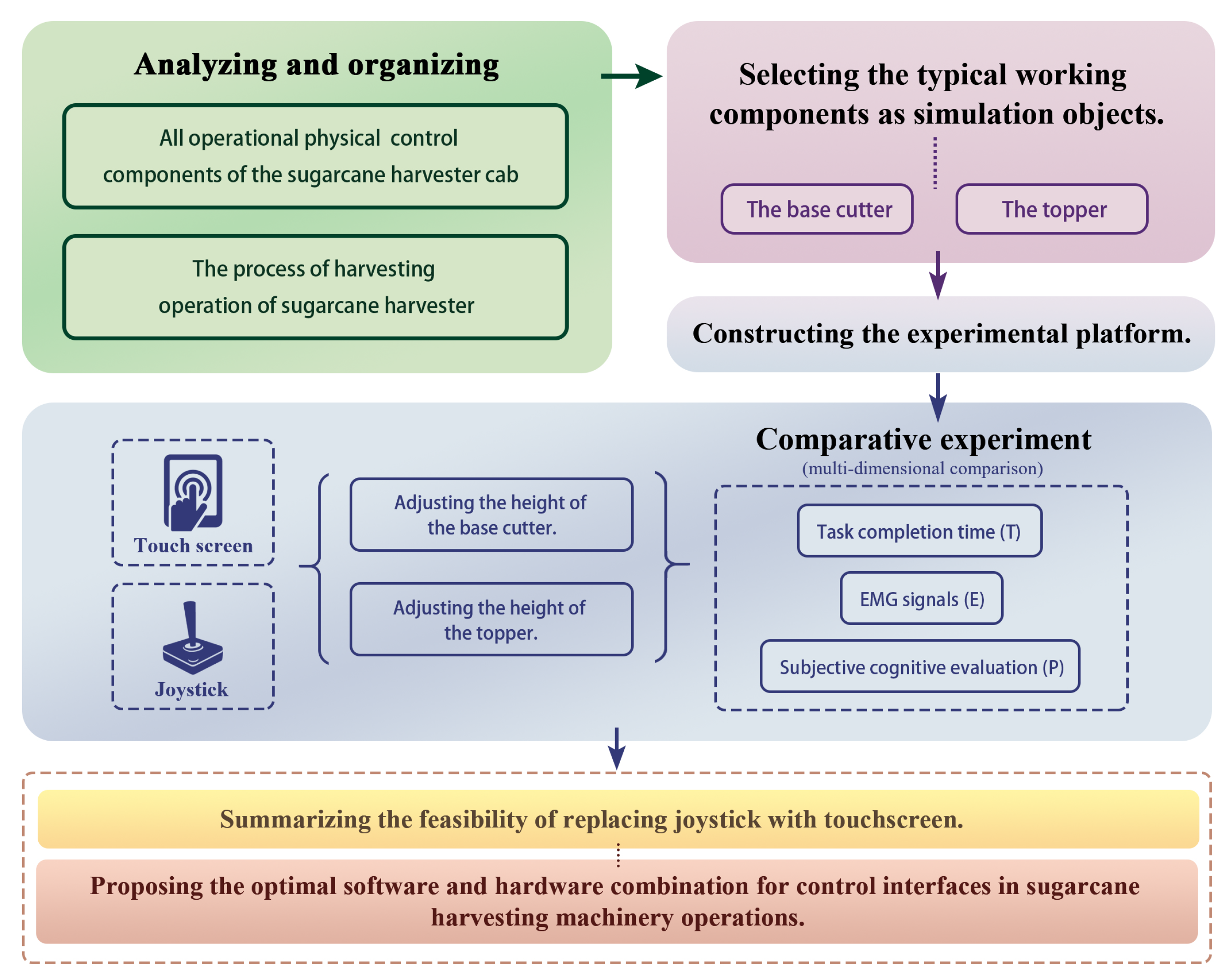
In conclusion, the majority of research in the field of human machine interfaces for automotive driving cabins currently focuses on aspects such as the interaction efficiency and user experience of in-vehicle displays and interfaces. The question of whether touch screen virtual buttons can replace mechanical control components is primarily based on experience and subjective judgment, with a lack of experimental studies comparing the efficiency of mechanical control components and touch screen in adjusting mechanical structures and controlling switches. The existing research on the driving and ergonomic comfort of sugarcane harvesters primarily focuses on the range of joint angles of the human body, without exploring the possibility of replacing operational control components with touch screen interfaces. The latter has the potential to effectively reduce superfluous physical control components, streamline the control interface, and likely make the sugarcane harvesting process more intuitive and efficient. Therefore, this study aims to conduct a multidimensional comparison through simulation experiments, evaluating the efficiency, muscle fatigue levels, and user experience of manipulating the height of the sugarcane harvester topper and base cutter using both joystick control and touch screen control. The research intends to explore the feasibility of future operations where all agricultural machine operations are taken over by a central control screen interface.
Surface electromyography (sEMG) is bioelectrical signals emitted by neuromuscular activity in the human body during spontaneous movement and can be seen as a composite of bioelectrical signals generated by subepidermal muscle activity superimposed in time and space in that epidermis [
23]. EMG signal, commonly utilized for measuring and assessing muscle activity, is a reliable and convenient method for fatigue detection at present [
24,
25]. It has been widely employed in evaluating the comfort of operators and assessing fatigue levels in different postures or conditions. Liu et al. conducted a relevant analysis of the steering comfort of automobiles in a virtual driving environment based on upper limb EMG signals of drivers, establishing an evaluation model for objective assessment of steering comfort [
26]. Mi et al. designed an 8-channel sEMG acquisition system, which automatically detects muscle fatigue states based on collected sEMG signals, indicating a proportional relationship between effective sEMG amplitude and muscle fatigue level [
27]. In this study, EMG testing will be employed to compare the fatigue levels of different control methods through simulated operational experiments. The experimental research design process is illustrated in
Figure 1.
2. Materials and Methods
2.1. Participants
This experiment involves the issue of learnability regarding two control methods: touch screen and joystick. Therefore, participants who have never been exposed to sugarcane harvester driving tasks are required. Considering the current situation where there are hardly any female drivers of sugarcane harvesters, this experiment ultimately selected 18 male university students between the ages of 18 and 28 as participants. None of the participants had experience with driving sugarcane harvesters. They did not report any vision problems that interfered with normal driving.
2.2. Equipment
The harvesting process of a sugarcane harvester consists of several steps: cutting the top, lifting the fallen sugarcane, cutting the roots, segmenting, separating, and loading. These steps involve the sequential utilization of height adjustment control joysticks for the topper, sugarcane lifter, and base cutter. Each mechanism is adjusted to the appropriate height for the current operation before initiating the harvesting process by activating the start switch. Real-time adjustments are necessary during sugarcane harvesting to accommodate varying field conditions, degree of lodging, and cane height. The base cutter and topper height adjustment joysticks are the most commonly used of these changes. As a result, to build the experimental platform for this investigation, the control mechanisms for the base cutter and topper were chosen as typical simulation objects.
Firstly, an experimental setup was constructed to simulate the control process of the base cutter and topper. In actual production, the height of the base cutter outside the cabin cannot be directly observed. Therefore, a visual feedback device called the base cutter height display tube was installed inside the cabin to provide real-time feedback to the driver regarding the current distance of the base cutter above the ground. The base cutter height display tube, a calibrated cylindrical tube equipped with markings, enables real-time feedback on the distance between the base cutter and the ground by detecting variations in the liquid level. To streamline the simulation experiment, a vertically oriented wooden board with calibrated stickers was employed as a simplified alternative. The vertical motion of the internal liquid was emulated using a DC-brushed electric push rod. The structure of the topper can be deconstructed into three primary components: a rotational motor, a supporting rod, and a blade. Due to its exceptional deformation resistance and low weight, the KT board, which is 5 mm thick, is used to manufacture both the blade and the supporting rod. The rotational motion of the swing arm is precisely controlled by a servo motor.
Through observation and calculation, it was found that the height adjustment of the topper can quickly rise or fall to the desired position in real-time correspondence. Therefore, the corresponding simulation mechanism for the topper height adjustment needs to rotate rapidly to the specified position. The motor’s rotation and adjustment have a real-time mapping relationship. On the other hand, the height adjustment of the base cutter involves a slower ascent and descent to the desired position. This is because the range of height adjustment for the base cutter is smaller compared to the topper, requiring greater precision. As a result, the adjustment speed is relatively slower. The corresponding simulation mechanism for the base cutter height display tube needs to raise or lower at a slower speed to the specified height. In this case, the motor’s rotation and adjustment do not adopt a real-time mapping relationship.
A 12-inch Android tablet, which is comparable in size to commonly used central control LCD screens, was selected for the touch screen control. Since the simulation mechanisms for the topper and base cutter of the sugarcane harvester operate in an up-and-down motion, the experimental setup followed the principles of human operating habits and interface design consistency. The touch screen control interface for the topper and base cutter height display tube on the experimental platform was designed as a vertical sliding bar. Sliding upwards corresponds to the upward movement of the mechanical structure, while sliding downwards corresponds to the downward movement. Additionally, flat icon designs were chosen to enhance the efficiency of user information processing. The joystick chosen is an XY two-axis Hall industrial joystick that closely resembles the appearance of sugarcane combine harvesters.
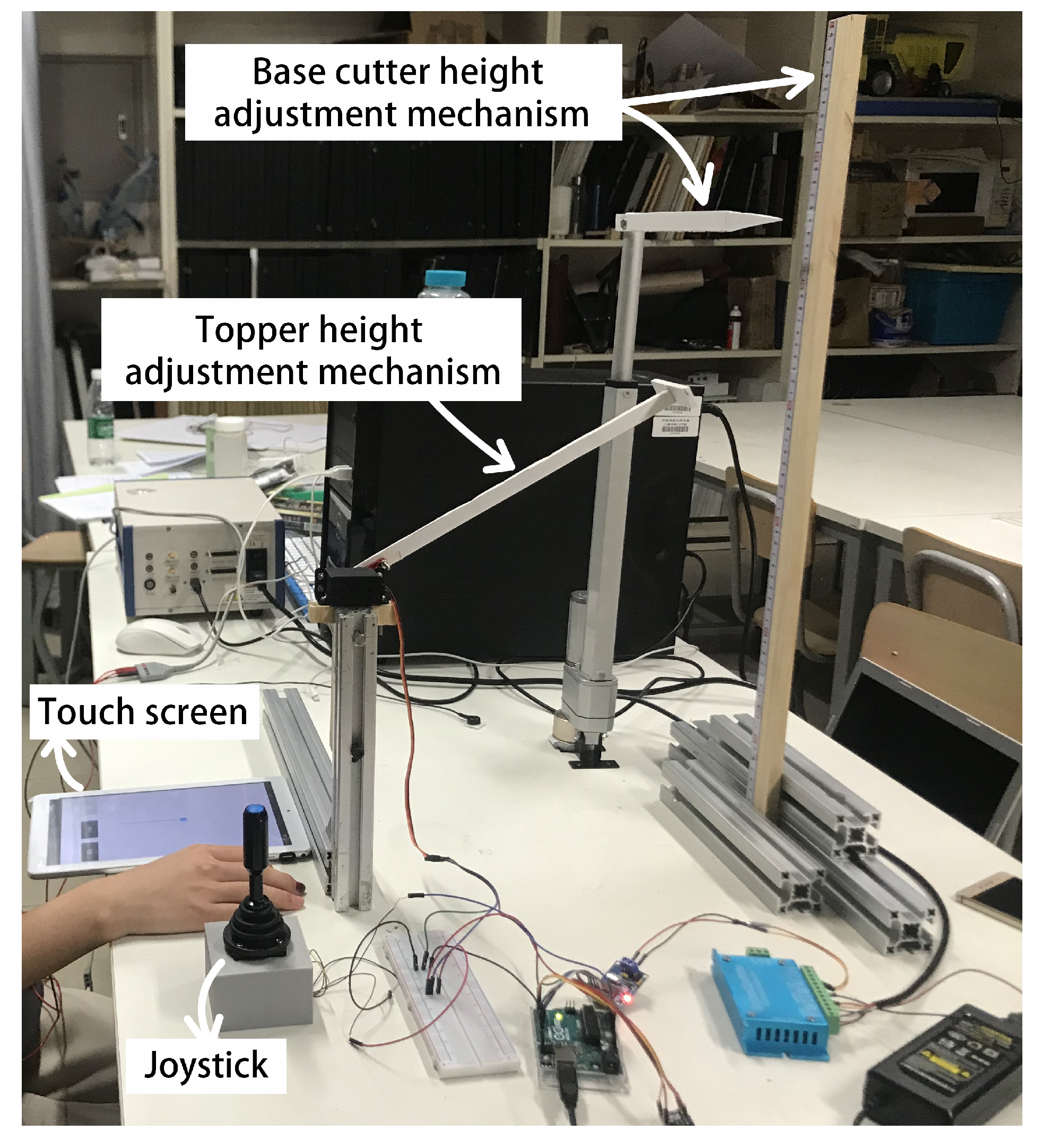
The complete experimental setup is shown in
Figure 2. The setup can be divided into two parts: the simulation mechanism for the topper and the simulation mechanism for the base cutter height display tube. Both parts can be adjusted in height using two control methods: a joystick and a touch screen. The touch screen control utilizes a tablet connected to a WiFi sensor, and the Arduino board is used to control the mechanical simulation mechanism. The joystick control employs a Hall joystick and the Arduino board to control the mechanical simulation mechanism [
28]. After adjusting the height, the experimental setup can be automatically reset for repeated experiments.
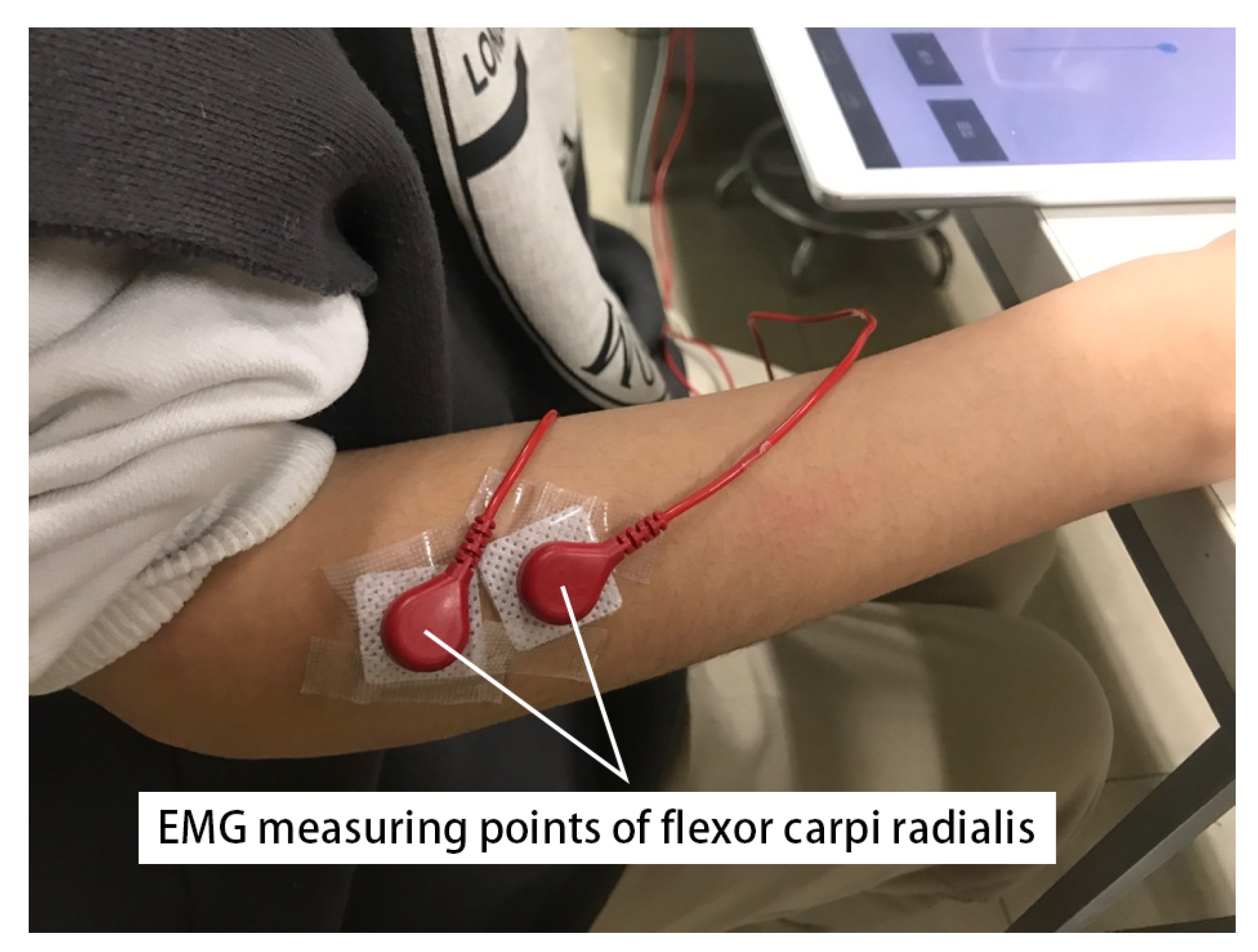
The use of joysticks and touch screens for height control requires individuals to have precise control over finger movements. The ability of an individual to accomplish a given task primarily by the movement of the hand as well as the muscle groups of the fingers with a combination of perceptual, tactile, and attentional abilities is known as the delicate operation ability of the human hand [
29]. During fine handing movements, the main force-emitting muscles are the flexor carpi radialis, flexor carpi ulnaris, extensor digitorum, and flexor digitorum superficialis [
30,
31]. Therefore, in this study, the flexor carpi radialis was chosen as the target for EMG measurements. The subjects’ EMG signals were continuously recorded during the experiment, and the signal acquisition instrument was the BioLab Mental and Behavioral Simultaneous Recording System produced by MindWare, Inc. To avoid interference with EMG signals acquisition due to oil on the skin surface, the subjects’ skin was cleaned thoroughly and prepared before electrode placement. The potential difference between the two electrodes over time is EMG signals [
32]. The electrode sheet may become loose during the experiment due to hand movements, so the electrode sheet and the wire should be fixed at the body surface of the measured muscle with medical rubber tape [
33], as shown in
Figure 3, to avoid affecting the experimental results.
In the field of human machine interaction, NASA-TLX is commonly used to assess the cognitive load experienced by participants after completing operational tasks. As this study aims to explore the learnability and ease of use of two control methods, touch screen and joystick, it is necessary to optimize the relevant questions based on the characteristics and objectives of the research. This will result in subjective evaluation scales that are easier to comprehend and have clearer indicators. This questionnaire intends to examine whether there are differences in the cognitive evaluations made by participants regarding the experimental tasks across different control methods. Specifically, a one-way analysis of variance (ANOVA) will be conducted, with the control methods (touch screen and joystick) as the independent variable, and the subjective evaluations of the participants’ experiences with the two control methods in the questionnaire as the dependent variable.
2.3. Experimental Design
The study employed a 2 × 2 factorial design, with two independent variables representing two types of control structures and two control methods. The dependent variables included EMG signal characteristics (E), task completion time (T), and subjective cognitive assessment values (P). The two types of control components were the height adjustment for the topper and the base cutter height display tube. Two sets of comparative experiments were conducted for each type, using touch screen control and joystick control. To eliminate the learning and adaptation effects of initial operations, participants were evenly divided into two groups for each type, with one group starting with touch screen control and the other with joystick control. Finally, one-way ANOVA was used for statistical inference of the experimental data.
The experimental design consists of two operational tasks as follows:
For the Topper Group: The task involves adjusting the height of the topper using both the joystick and touch screen. The adjustment is made from position 35 to 55 on the scale. This task is repeated three times.
For the Base Cutter Group: The task involves adjusting the height of the base cutter display tube using both the joystick and touch screen. The pointer is initially moved from position 45 to 55 or from 55 to 45 on the scale. This task is also repeated three times.
2.4. Procedures
Prior to the experiment, the participants were randomly assigned to two groups. Subsequently, the participants were instructed to sit in the designated position and adjust the chair to a comfortable and convenient position for operation. They were then briefed on the general nature of the experiment and given instructions to connect the electrode pads to the BioLab system. After a two-minute rest period, the experiment commenced. Under the guidance of the experimenters, the participants sequentially completed four operational tasks: adjusting the topper height using the joystick and touch screen, each repeated three times, and adjusting the base cutter height display tube using the joystick and touch screen, also repeated three times, resulting in a total of 12 trials. The order of tasks was reversed for the other group. Following each task, the participants rested for two minutes before proceeding to the next task, during which time the experimenters reset the equipment. The operational time for each task and the electromyographic response signals during the participants’ performance were recorded and displayed in real time on a computer screen via the BioLab system. Upon completion of the operational tasks, the participants filled out a questionnaire based on their experiences and perceptions during the experiment, providing subjective feedback on their impressions of the two control methods.
4. Validation Experiment
4.1. Test Methods
Compared to indoor environments, numerous significant external factors must not be disregarded during the operation of agricultural machinery. For instance, vehicle shaking and bouncing can arise from uneven road surfaces, while the driver’s recognition and use of the touch screen may be affected by intense light exposure. Moreover, variations in operational efficiency and user experience can occur due to factors such as the driver’s age, education level, and proficiency in operating agricultural machinery. To exclude the impact of external factors (e.g., vehicle shaking, glare, noise, and the driver) on the aforementioned experimental results, a field experiment was conducted to validate the ongoing effectiveness of the indoor simulated experimental results in real operating environments of agricultural machinery. Additionally, in consideration of potential disparities between the actual usage experience and manipulation force of the joystick compared to a small-scale simulated joystick, a straight handle joystick resembling the shape and dimensions of the cabin in a sugarcane harvester was chosen for experimental validation, aiming to replicate the genuine operating environment.
Participants for the experiment included six experienced professional agricultural machinery operators aged between 35 and 50 years, with educational backgrounds ranging from junior high school to high school. They had normal or corrected vision and no color blindness or color weakness. The height adjustment mechanisms for the topper and base cutter were placed in Dongfanghong LX904 tractor’s cabin for this experiment (
Figure 7). The participants were instructed to complete all operational tasks while the vehicle was moving at a low speed of 2 km/h in the field. The experimental design, equipment, and procedures followed the guidelines outlined in
Section 2.2,
Section 2.3 and
Section 2.4. However, the measurement of EMG signals was omitted during the field experiments. This decision was made due to the potential decrease in quality and accuracy of EMG signal acquisition caused by the unstable contact between the electrodes and muscles during dynamic movements.
4.2. Field Test Result
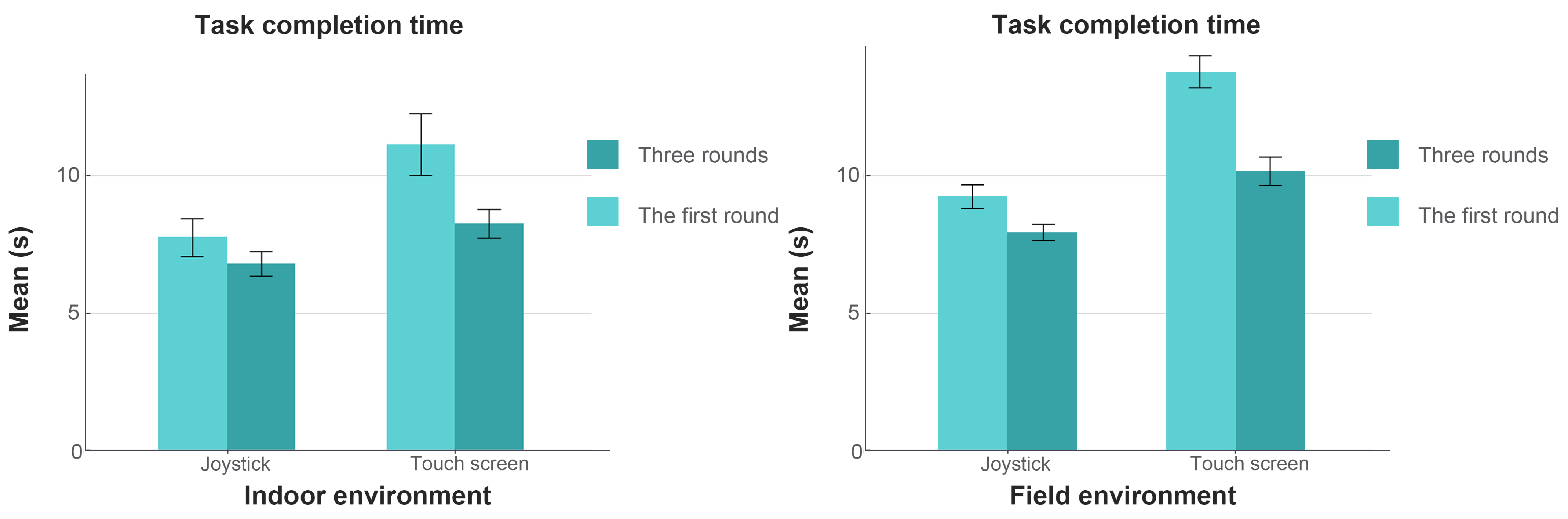
The experimental data of operation time and subjective evaluation scale obtained in the field environment were subjected to one-way ANOVA. In the topper group, different control methods led to significant differences in operation time (F (1,34) = 5.324; p < 0.05). The average time for touch screen control was longer, indicating lower operational efficiency compared to the joystick. In the field environment, the average time for both control methods was higher than that in the indoor environment, possibly due to the vehicle shaking affecting the driver’s precise control of the components. In terms of the extent of average time increase, touch screen control showed an increase of 1.85 s, higher than the 1.07 s with joystick control. This suggests that compared to the joystick, touch screen control is more susceptible to changes in the external environment, possibly due to intense sunlight exposure and vehicle shaking. The experimental data in the base cutter group exhibited a similar trend to the indoor experiments, with a significant increase in overall operation time. Nevertheless, no significant difference was observed between the two control methods in terms of task completion time.
In terms of ease of use, the average operation time for touch screen control in the first round was significantly higher than that for joystick control in the topper group (F (1,10) = 8.912;
p < 0.05). However, the difference in total average time between the two control methods across three rounds was noticeably reduced compared to the difference in the first round (
Figure 5), indicating that touch screen control initially poses more challenges and has lower ease of use compared to joystick control. Whereas a higher number of participants using touch screen control exhibited a decreasing trend in experimental time for the first and second rounds, as well as for the second and third rounds, in comparison to joystick control. Furthermore, the difference in experimental time between the first and second rounds was significantly greater for touch screen control than for joystick control (F (1,10) = 12.674;
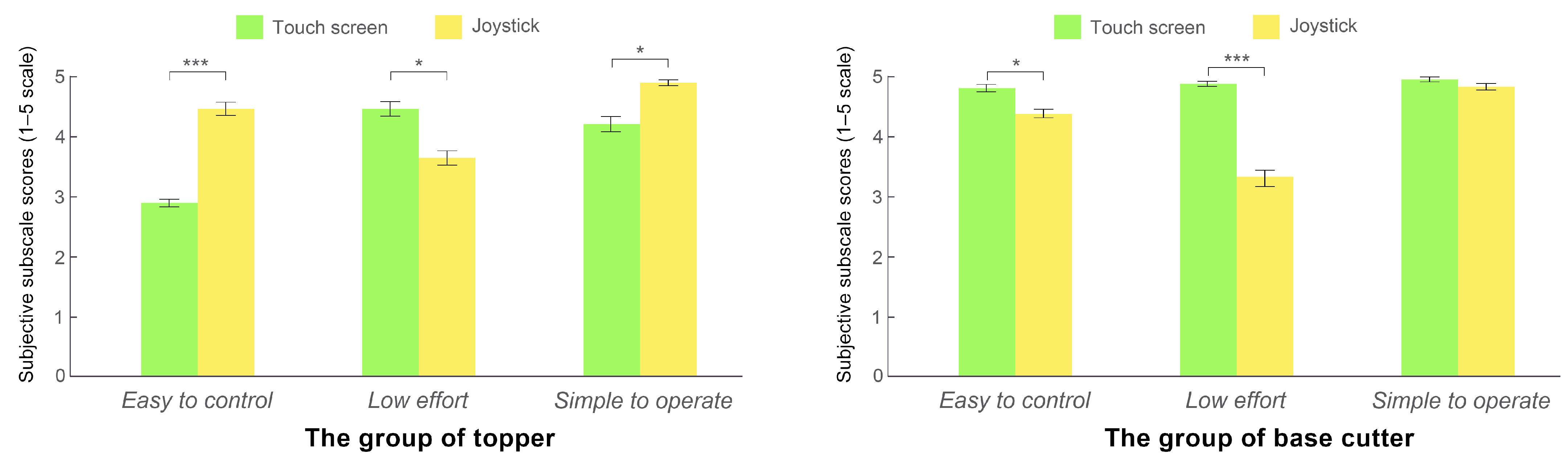
p < 0.05), suggesting better learnability for touch screen control and a significant improvement in work efficiency with fewer repetitions. The analysis of the cognitive scale results revealed that participants in the topper group perceived touch screen control as requiring less effort (
p < 0.05) while considering joystick operation as simpler (
p < 0.05) (
Figure 8). These findings are consistent with the previously established conclusion based on the analysis of operation time, which indicated that “joystick control offers better ease of use”. In the base cutter group, participants perceived touch screen control as easier to control (
p < 0.05) and more labor-saving (
p < 0.05).
Overall, the findings from both the field experiment and indoor experiment regarding the operational efficiency, ease of use, learnability, and subjective evaluations of the touch screen and joystick control methods are largely consistent. This successfully eliminates the possibility of external environmental factors leading to divergent experimental conclusions.
5. Discussion
For different work tasks, the efficiency of using different input devices may vary, but they each have their own advantages. For example, Herring et al. found that touchpads and mini joysticks are the best cursor control devices for laparoscopic tools [
35]. In addition, in the interface of different input devices for manipulating wheelchair mounted robotic arms to select objects, participants performed better in the touch screen interface than in the joystick interface [
36]. The results of this experiment also show that the joystick has a faster start-up action and is easier to use, while the touch screen is more labor-saving [
37]. Based on a comprehensive analysis of two sets of experiments conducted in indoor and field settings, and through an examination of the operation time, it was found that for adjusting the height of the topper, the ease of use of joystick control was greater than that of touch screen control, and the learnability was less than that of touch screen control. Summarizing the task completion time of three rounds of repetition experiments, it was found that for adjusting the height of the topper, joystick control was more efficient than touch screen control; for adjusting the height of the base cutter, there was no obvious manifestation of ease of use and learnability between the two control methods, and their operating efficiency was also close. All these indicate that input devices present significant differences in work efficiency and availability due to different operation tasks. Therefore, when targeting a specific operation task, input devices should not be determined by experience but by experimental demonstration to find the best control method.
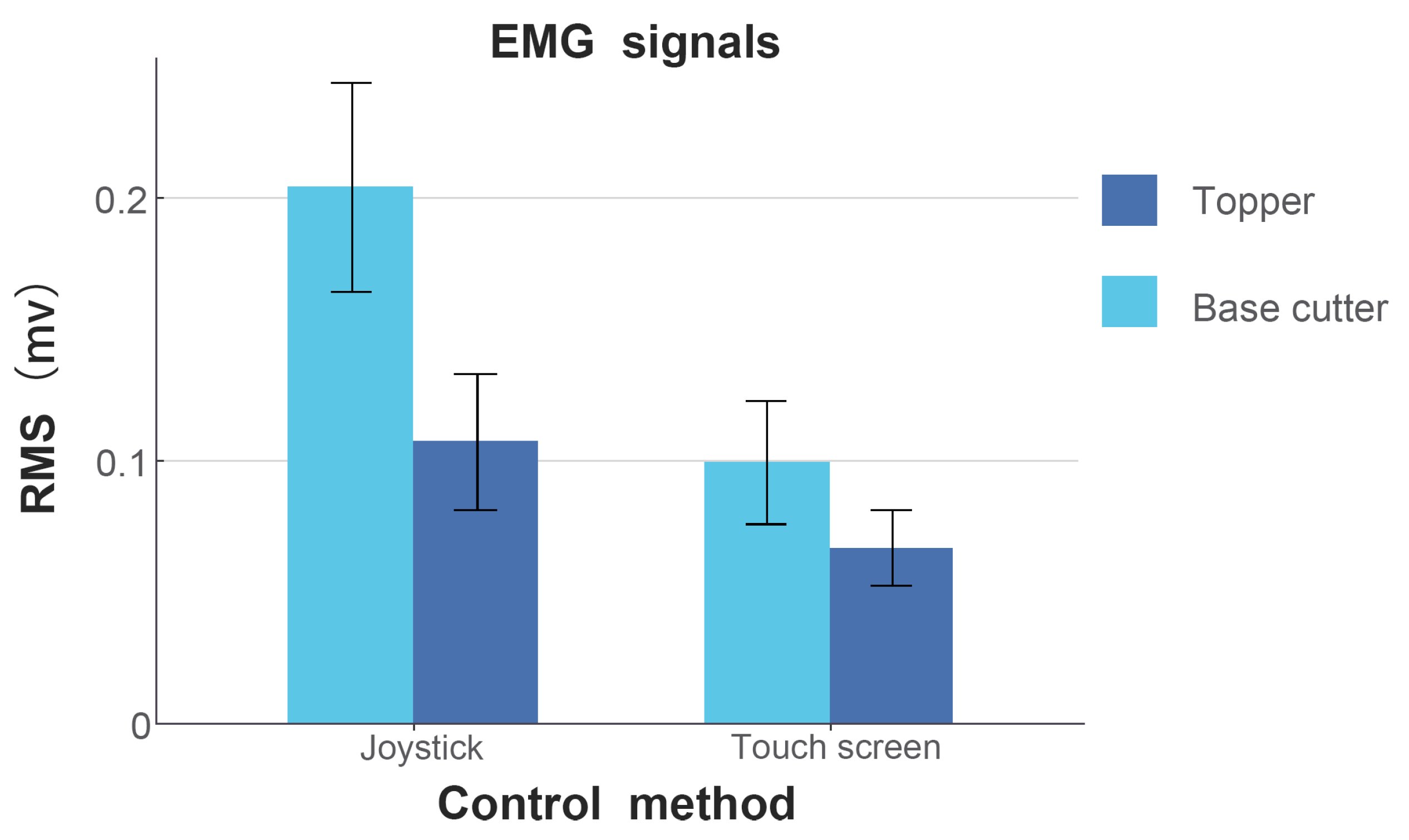
During the indoor experiment, the RMS value of the EMS signals of the main force muscle, the flexor carpi radialis, was tested. The results showed that there was no significant difference in the muscle activation level between the two control methods during the topper adjustment process. However, in the base cutter group experiment, it was found that the average muscle activation level of the flexor carpi radialis caused by joystick control was greater than that of touch screen control during the experiment. The reason is that the adjustment time for the height of the base cutter is longer and the height feedback is slower, so there is a greater difference in muscle fatigue level, which is suitable for using touch screen control instead of joystick control to adjust and reduce muscle fatigue caused by long-term continuous work for drivers. The speed of rising and falling of the topper height adjustment is relatively fast, and using the existing joystick adjustment can ensure the adjustment efficiency. Therefore, in the operation interface design process, it is recommended to cancel the joystick for adjusting the height of the base cutter and incorporate it into the touch screen control interface, while keeping the joystick for adjusting the height of the topper in its current form.
In modern car designs, there is a significant trend of replacing physical buttons with touch screen virtual buttons for various features, such as air conditioning controls and window height adjustments. This design approach not only saves space but also reduces the force required by the driver during operation. During field research, it was found that prolonged use of the switches on the control buttons of the sugarcane harvester could cause the lettering to become blurry, leading to potential operational errors by the driver. Additionally, the control buttons for the base cutter, sugarcane lifter, harvesting, and weed removal are not frequently used and do not have adjustable functions. Therefore, in the optimization of the operational interface in the sugarcane harvester’s cabin, it is possible to eliminate the control buttons for these solenoid valves and consolidate their functions into a touch screen control system. This would streamline the design and improve the ease of use of the operating interface.
The subjective cognitive scale values of the two control methods showed that the subjects in the topper group considered the touch screen control to be more effortless than the joystick control. However, there was actually no significant difference in the degree of muscle activation induced by the two in the EMG signal analysis of the indoor environment. After the experiment, 75% of the subjects chose the joystick as the preferred control method, which also confirms that the subjective perception of the touch screen control here may be based on empirical judgment, and the perception of labor-saving was not obvious during the actual experiment. Similar phenomena have been reported in previous studies. Stanton et al. found that users perceive touch screens as more usable, even in the presence of vibrations, despite sometimes inferior performance compared to mechanical devices [
38]. This phenomenon may be due to differences in participants’ performance assessments of different devices, which can affect their perception of the degree of enabling power [
39].
The optimal combination of different input devices tends to improve productivity, and the combination of a novel cross-shaped key keyboard and a stylus is considered the best input method for computers to meet the input rate requirements of mobile IT products [
40]. Based on the above research, the best combination of hardware and software for the operational control components of sugarcane harvesters is to retain the joysticks of the topper, sugarcane lifter for height adjustment and fan steering. The base cutter height adjustment joystick and all switch control buttons are converted to touch screen control mode and centralized on the central control screen.
6. Conclusions
This study analyzes and investigates the task completion time, EMG signals during the experimental process, and subjective assessment values of the participants. Suggestions are provided for reducing the workload for drivers and optimizing the layout of the driver’s cabin. The results of the topper group experiment data showed that the ease of use of the joystick control was higher than that of the touch screen control, and the learnability was lower than that of the touch screen control. Combining the average time taken in the third round of experiments after stabilizing the experimental time and the subjective perceptions of the participants, it is considered more appropriate to use the joystick for height adjustment in the topper mechanism, which provides real-time feedback and has a fast adjustment speed. The results of the base cutter group experiment data showed that there was not much difference in the ease of use and learnability between the joystick and touch screen. However, the muscle activation level with the joystick control was significantly higher than that with the touch screen control. It is more likely to cause muscle fatigue during long work durations. Combining the subjective perceptions of the participants, it is considered more appropriate to use the touch screen control for height adjustment in the base cutter mechanism, which provides non-real-time feedback and has a slower adjustment speed.
In this experiment, the EMG signals of the flexor carpi radialis were measured using the EMG_RMS as a statistical feature to provide a comparative and intuitive explanation of the muscle activation levels between the two control methods. Furthermore, the ease of use of the two control methods was compared by analyzing the duration of the first round of experiments, and the learnability was compared by examining the differences in duration between adjacent experiments. This study presents an objective and multidimensional experimental analysis method for future research on similar human machine interaction interfaces.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}