Modelling Soil Water Content in a Tomato Field: Proximal Gamma Ray Spectroscopy and Soil–Crop System Models

 ,
,  ,
,  ,
,  , ,
, ,  ,
,  , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
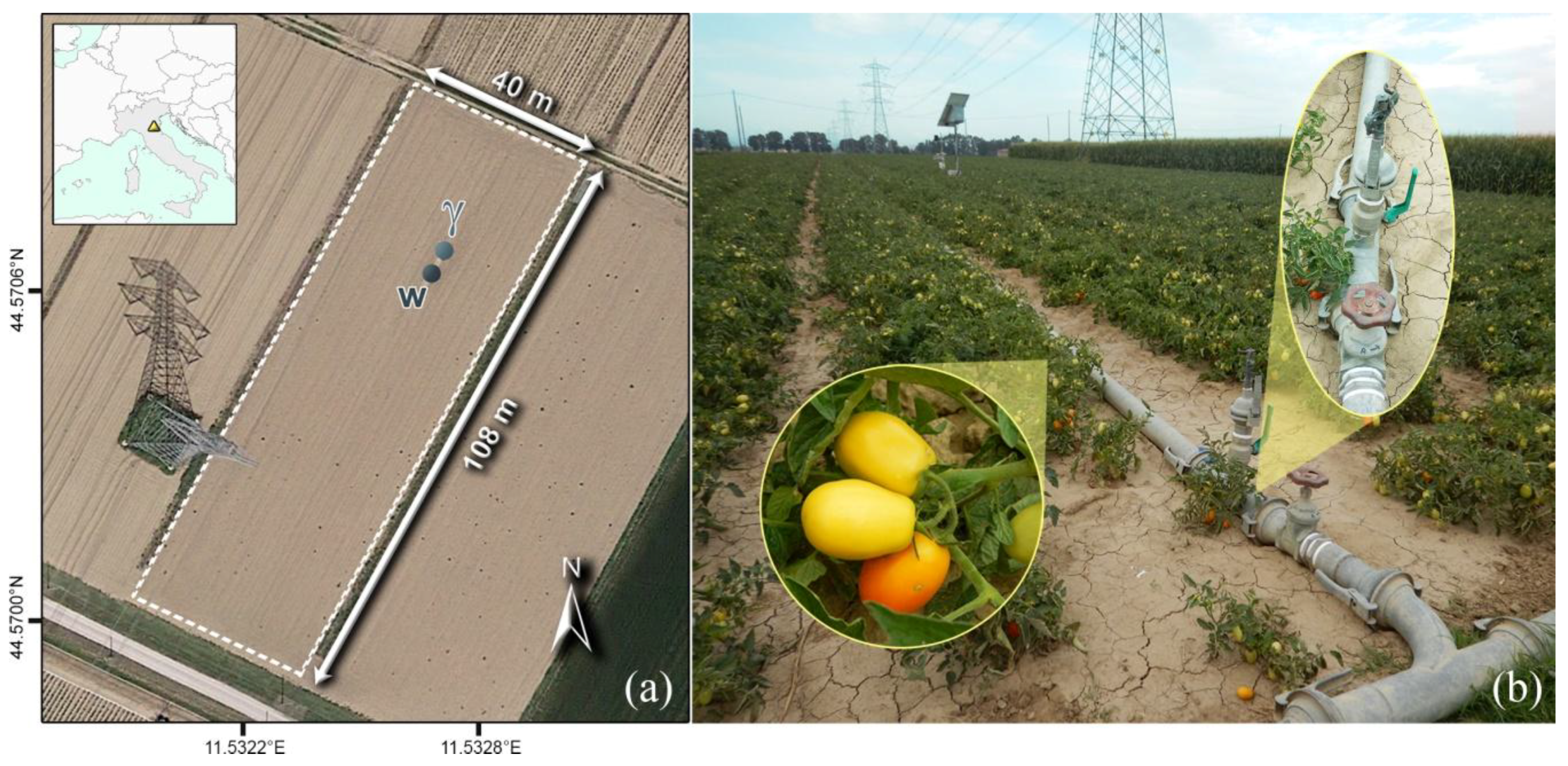
2.1. Experimental Site
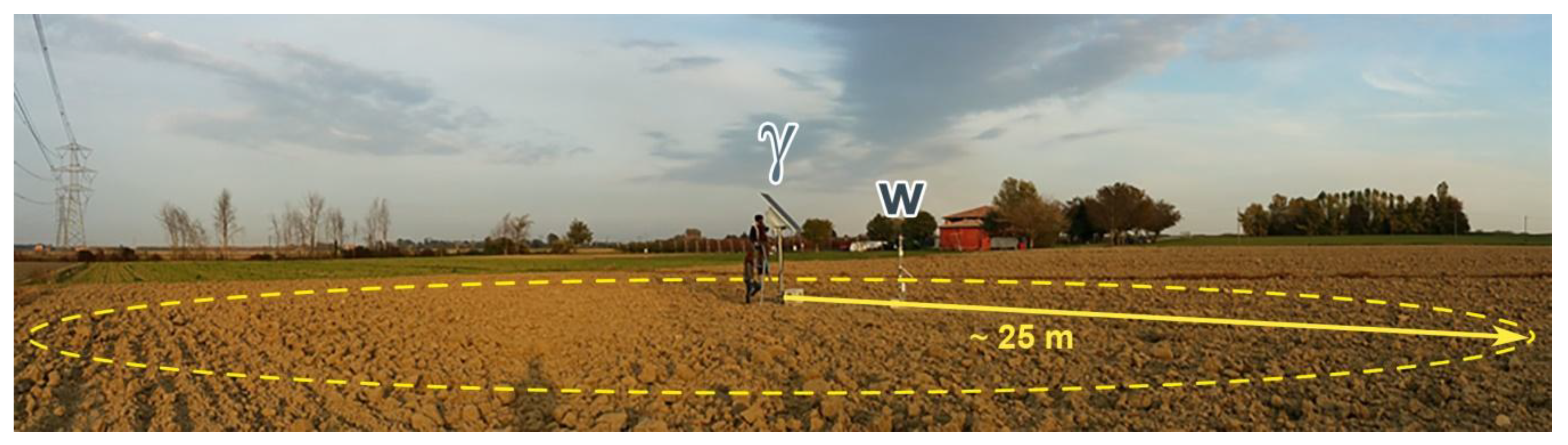
2.2. Experimental Setup
2.3. Soil Water Content with Soil Crop System Models
2.3.1. CRITeRIA
2.3.2. AquaCrop
2.3.3. IRRINET
3. Results
4. Discussions
5. Conclusions
- (i)
- Proximal gamma ray spectroscopy is an excellent method for a non-stop tracing of soil water content at an intermediate spatial scale between punctual and satellite fields of view;
- (ii)
- Once a reliable calibration is provided through direct measurements, soil water contents inferred from gamma ray spectroscopy do not require detailed soil and crop parameterization and are characterized by relatively low uncertainties;
- (iii)
- While soil–crop system models simulate soil dynamics with a daily resolution, the proposed method is able to provide reliable higher frequency estimations sensitive to transient soil moisture levels, as proved by the excellent agreement with direct gravimetric measurements;
- (iv)
- Proximal gamma ray spectroscopy gives a satisfactory description of soil water content over time also when compared to simulation data, showing that the combination of accurate soil water content measurements and water budget computation with crop models can be effective tools for water resources and irrigation planning.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Saadi, S.; Todorovic, M.; Tanasijevic, L.; Pereira, L.S.; Pizzigalli, C.; Lionello, P. Climate change and mediterranean agriculture: Impacts on winter wheat and tomato crop evapotranspiration, irrigation requirements and yield. Agric. Water Manag. 2015, 147, 103–115. [Google Scholar] [CrossRef]
- Pereira, L.S. Challenges on water resources management when searching for sustainable adaptation to climate change focusing agriculture. Eur. Water 2011, 34, 41–54. [Google Scholar]
- Sultana, S.N.; Mani Hazarika, U.; Misra, U.K. Improvement of water use efficiency and remote sensing applications for surface soil moisture monitoring. ADBU-J. Eng. Technol. Sult. 2017, 6, 2348–7305. [Google Scholar]
- Patanè, C.; Tringali, S.; Sortino, O. Effects of deficit irrigation on biomass, yield, water productivity and fruit quality of processing tomato under semi-arid mediterranean climate conditions. Sci. Hortic. 2011, 129, 590–596. [Google Scholar] [CrossRef]
- Ozbahce, A.; Tari, A.F. Effects of different emitter space and water stress on yield and quality of processing tomato under semi-arid climate conditions. Agric. Water Manag. 2010, 97, 1405–1410. [Google Scholar] [CrossRef]
- Liang, H.; Hu, K.; Batchelor, W.D.; Qi, Z.; Li, B. An integrated soil–crop system model for water and nitrogen management in north China. Sci. Rep. 2016, 6, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Ochsner, T.E.; Cosh, M.H.; Cuenca, R.H.; Dorigo, W.A.; Draper, C.S.; Hagimoto, Y.; Kerr, Y.H.; Njoku, E.G.; Small, E.E.; Zreda, M. State of the art in large-scale soil moisture monitoring. Soil Sci. Soc. Am. J. 2013, 77, 1888. [Google Scholar] [CrossRef] [Green Version]
- Rouze, G.S.; Morgan, C.L.S.; McBratney, A.B. Understanding the utility of aerial gamma radiometrics for mapping soil properties through proximal gamma surveys. Geoderma 2017, 289, 185–195. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Güntner, A.; Hübner, C.; Kusche, J.; Jonard, F.; Vey, S.; Vereecken, H. Emerging methods for noninvasive sensing of soil moisture dynamics from field to catchment scale: A review. Wiley Interdiscip. Rev. Water 2015, 2, 635–647. [Google Scholar] [CrossRef]
- Carroll, T. Airborne soil moisture measurement using natural terrestrial gamma radiation. Soil Sci. 1981, 132, 358–366. [Google Scholar] [CrossRef]
- Grasty, R.L. Radon emanation and soil moisture effects on airborne gamma-ray measurements. Geophysics 1997, 62, 1379–1385. [Google Scholar] [CrossRef]
- McHenry, J.R.; Gill, A.C. Measurement of soil moisture with a portable gamma ray scintillation spectrometer. Water Resour. Res. 1970, 6, 989–992. [Google Scholar] [CrossRef]
- Loijens, H.S. Determination of soil water content from terrestrial gamma radiation measurements. Water Resour. Res. 1980, 16, 565–573. [Google Scholar] [CrossRef]
- Robinson, D.A.; Gardner, C.M.K.; Cooper, J.D. Measurement of relative permittivity in sandy soils using TDR, capacitance and theta probes: Comparison, including the effects of bulk soil electrical conductivity. J. Hydrol. 1999, 223, 198–211. [Google Scholar] [CrossRef]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P.; et al. Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Gerhards, H.; Wollschläger, U.; Yu, Q.; Schiwek, P.; Pan, X.; Roth, K. Continuous and simultaneous measurement of reflector depth and average soil-water content with multichannel ground-penetrating radar. Geophysics 2008, 73, J15–J23. [Google Scholar] [CrossRef]
- Alamry, A.S.; van der Meijde, M.; Noomen, M.; Addink, E.A.; van Benthem, R.; de Jong, S.M. Spatial and temporal monitoring of soil moisture using surface electrical resistivity tomography in mediterranean soils. Catena 2017, 157, 388–396. [Google Scholar] [CrossRef]
- Tavola Cpom: Superficie (Ettari) e Produzione (Quintali): Pomodoro, Pomodoro da Industria. Dettaglio per Provincia-Anno 2016. Available online: http://agri.istat.it/jsp/dawinci.jsp?q=plCPO0000020000213200&an=2016&ig=1&ct=418&id=15A|18A|28A (accessed on 22 February 2018).
- Bittelli, M.; Tomei, F.; Pistocchi, A.; Flury, M.; Boll, J.; Brooks, E.S.; Antolini, G. Development and testing of a physically based, three-dimensional model of surface and subsurface hydrology. Adv. Water Resour. 2010, 33, 106–122. [Google Scholar] [CrossRef]
- Steduto, P.; Hsiao, T.C.; Raes, D.; Fereres, E. Aquacrop-the fao crop model to simulate yield response to water: I. Concepts and underlying principles. Agron. J. 2009, 101, 426–437. [Google Scholar] [CrossRef]
- Mannini, P.; Genovesi, R.; Letterio, T. Irrinet: Large scale DSS application for on-farm irrigation scheduling. Proced. Environ. Sci. 2013, 19, 823–829. [Google Scholar] [CrossRef]
- Munaretto, S.; Battilani, A. Irrigation water governance in practice: The case of the canale emiliano romagnolo district, Italy. Water Policy 2014, 16, 578–594. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Koppen–Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef]
- Head, K.; Epps, R.H. Manual of Soil Laboratory Testing, 2nd ed.; CRC Press: Boca Raton, FL, USA, 1992; Volume 1. [Google Scholar]
- Bittelli, M.; Campbell, G.S.; Tomei, F. Soil Physics with Python: Transport in the Soil-Plant-Atmosphere System; Oxford University Press: Oxford, UK, 2015. [Google Scholar]
- Campbell, G.; Shiozawa, S. Prediction of hydraulic properties of soils using particle-size distribution and bulk density data. In Proceedings of the International Workshop on Indirect Methods for Estimating the Hydraulic Properties of Unsaturated Soils, Riverside, CA, USA, 11–13 October 1989; University of California: Riverside, CA, USA, 1992; pp. 317–328. [Google Scholar]
- Campbell, G.S. A simple method for determining unsaturated conductivity from moisture retention data. Soil Sci. 1974, 117, 311–314. [Google Scholar] [CrossRef]
- Hargreaves, G.H.; Samani, Z.A. Reference crop evapotranspiration from temperature. Appl. Eng. Agric. 1985, 1, 96–99. [Google Scholar] [CrossRef]
- Baldoncini, M.; Albéri, M.; Bottardi, C.; Chiarelli, E.; Raptis, K.G.C.; Strati, V.; Mantovani, F. Investigating the potentialities of monte carlo simulation for assessing soil water content via proximal gamma ray spectroscopy. J. Environ. Radioact. 2018, in press. [Google Scholar]
- Nuclear Energy Department, IAEA. Guidelines for Radioelement Mapping Using Gamma Ray Spectrometry Data; Nuclear Fuel Materials Section, IAEA: Vienna, Austria, 2003; p. 179. [Google Scholar]
- Feng, T.; Cheng, J.; Jia, M.; Wu, R.; Feng, Y.; Su, C.; Chen, W. Relationship between soil bulk density and pvr of in situ γ spectra. Nuclear Instrum. Methods Phys. Res. Sect. A 2009, 608, 92–98. [Google Scholar] [CrossRef]
- Dext3r. Available online: http://www.Smr.Arpa.Emr.It/dext3r/ (accessed on 27 February 2018).
- Battilani, A.; Mannini, P. Influence of water table depth on the yield and quality of processing tomatoes. In Proceedings of the International Society for Horticultural Science (ISHS), Leuven, Belgium, 14–18 July 1994; pp. 295–298. [Google Scholar]
- Driessen, P.M. The Water Balance of the Soil in Modelling of Agricultural Production: Weather, Soil and Crops; Van keulen, H., Wolf, E.J., Eds.; Center Agricultural Pub: Wageningen, The Netherlands, 1986. [Google Scholar]
- Doorenbos, J. Land and Water Division Guidelines for Predicting Crop Water Requirements; FAO Irrigation and Drainage Paper; FAO: Rome, Italy, 1977. [Google Scholar]
- Baldoncini, M.; Albéri, M.; Bottardi, C.; Chiarelli, E.; Raptis, K.G.C.; Strati, V.; Mantovani, F. Biomass water content effect in soil water content assessment via proximal gamma ray spectroscopy. Geoderma 2018, in press. [Google Scholar]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Sand (%) | 45 |
| Silt (%) | 40 |
| Clay (%) | 15 |
| Soil textural class | Loam |
| Soil bulk density (kg/m3) | 1345 |
| Organic matter (%) | 1.26 |
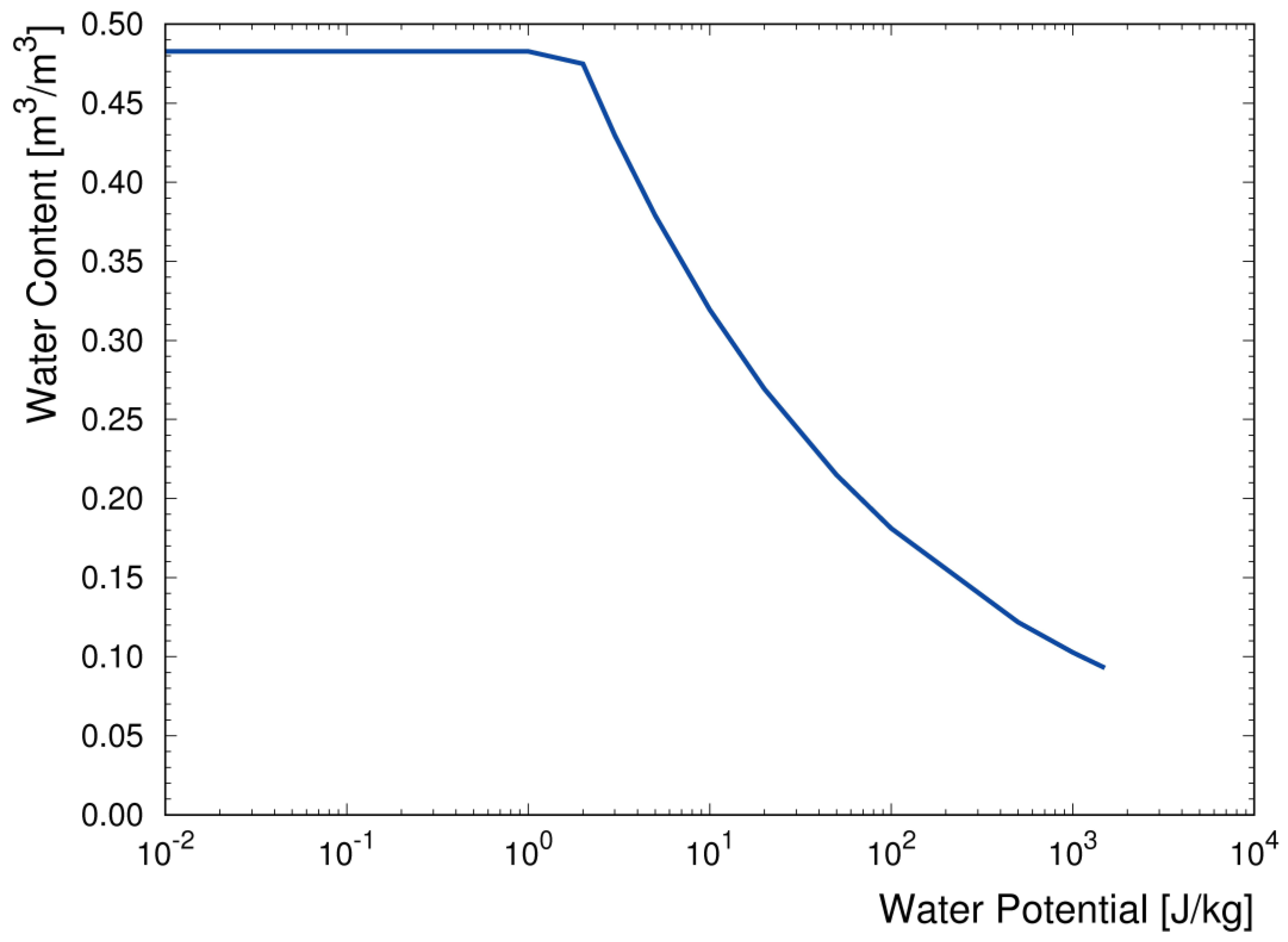
| Wilting Point (θWP) (m3/m3) | 0.09 |
| Field Capacity (θFC) (m3/m3) | 0.32 |
| Saturation (θs) (m3/m3) | 0.48 |
| Ks (cm/day) | 23 |
| Day | θG [m3/m3] | θγ [m3/m3] | θC [m3/m3] | θA [m3/m3] | θI [m3/m3] |
|---|---|---|---|---|---|
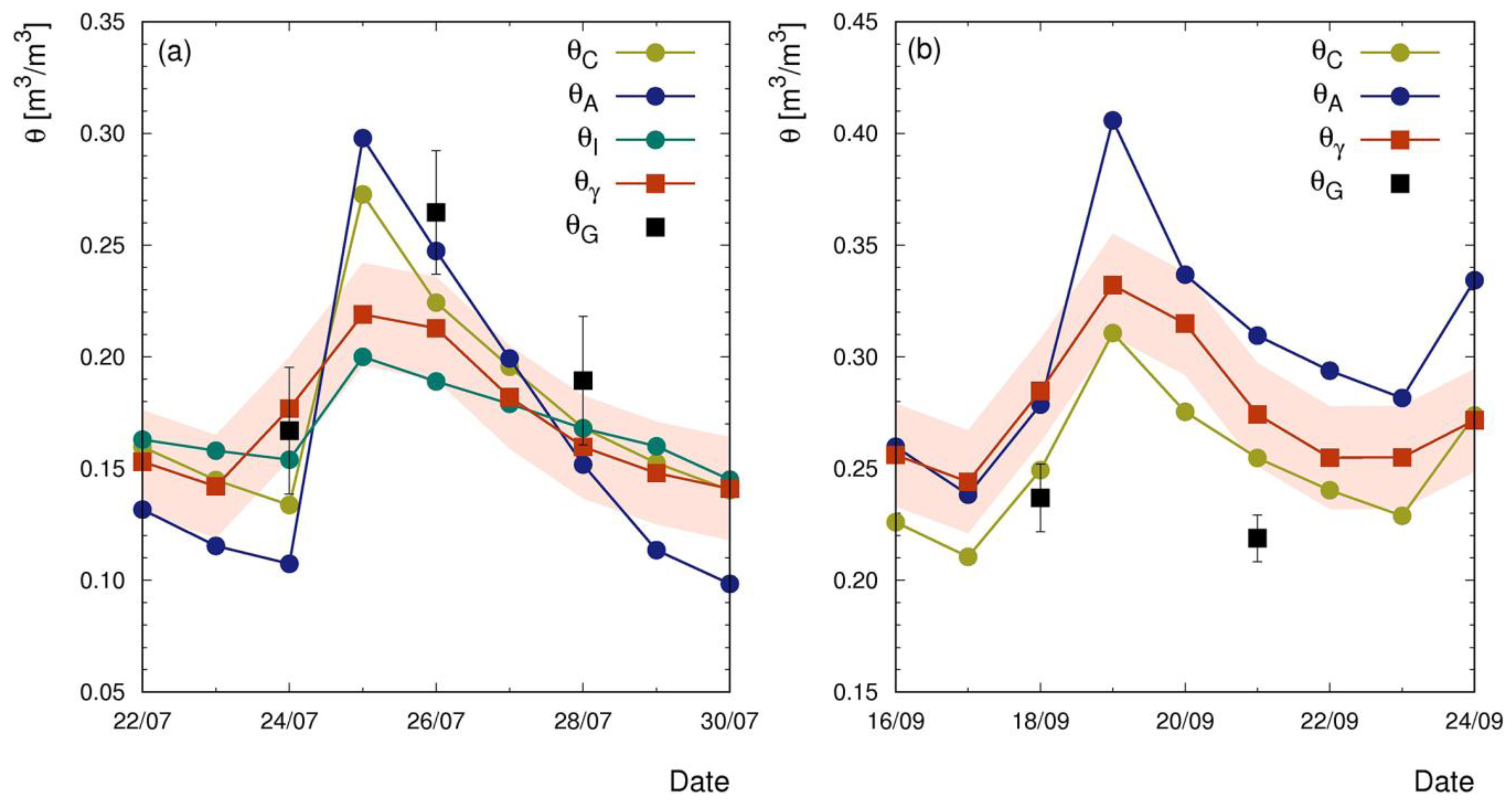
| 24 July | 0.167 ± 0.028 | 0.170 ± 0.023 | 0.134 | 0.107 | 0.154 |
| 26 July | 0.265 ± 0.028 | 0.243 ± 0.023 | 0.224 | 0.247 | 0.189 |
| 28 July | 0.189 ± 0.029 | 0.179 ± 0.023 | 0.168 | 0.152 | 0.168 |
| 21 July | 0.237 ± 0.015 | 0.245 ± 0.023 | 0.255 | 0.310 | / |
| CRITeRIA | AquaCrop | IRRINET | ||
|---|---|---|---|---|
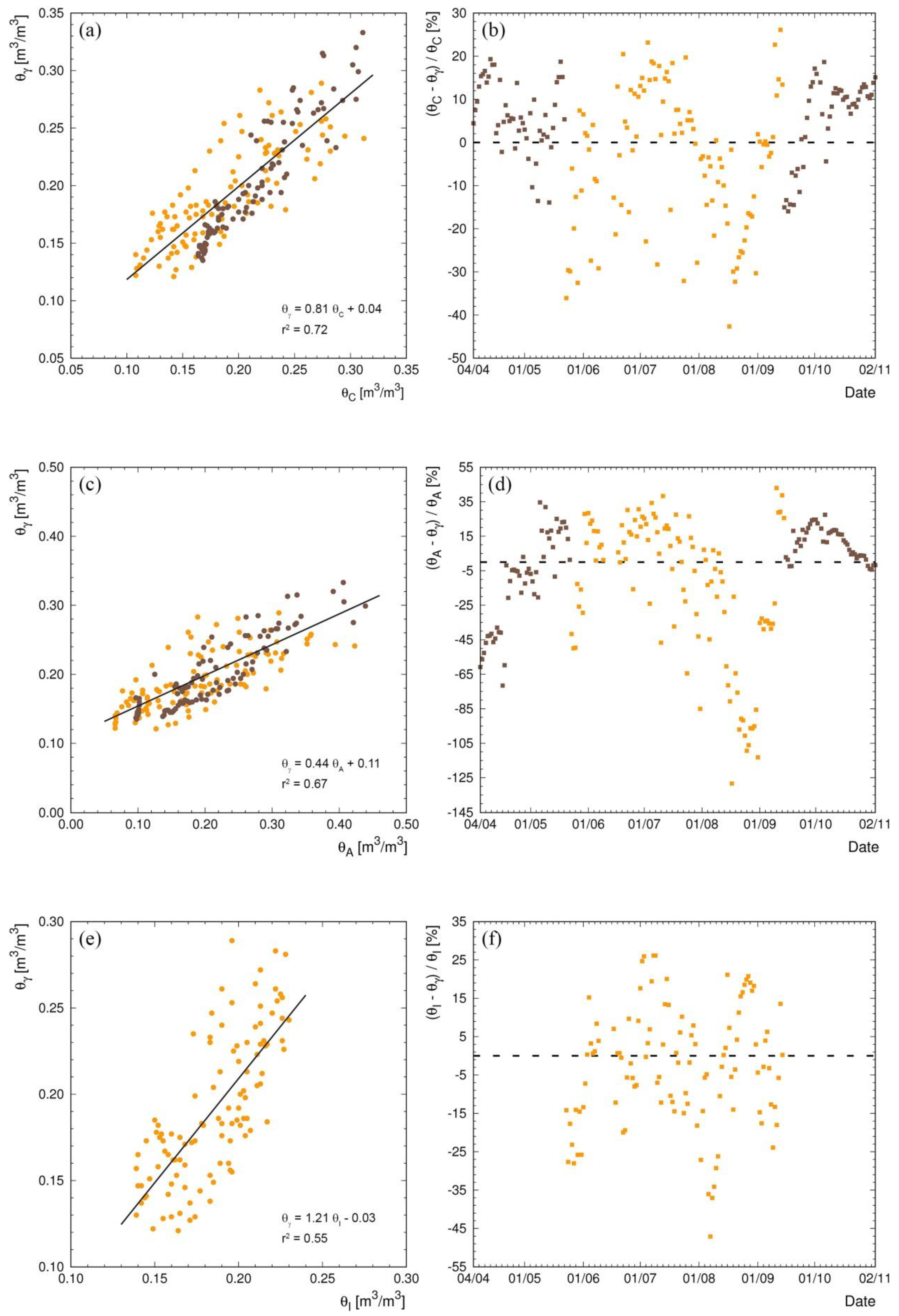
| In presence of the tomato crop | m ± δm | 0.68 ± 0.05 | 0.37 ± 0.03 | 1.21 ± 0.11 |
| q ± δq [m3/m3] | 0.06 ± 0.01 | 0.12 ± 0.01 | −0.03 ± 0.02 | |
| r2 | 0.65 | 0.53 | 0.55 | |
| NS | 0.51 | −1.04 | 0.51 | |
| Bare soil condition | m ± δm | 1.15 ± 0.04 | 0.57 ± 0.03 | / |
| q ± δq [m3/m3] | −0.04 ± 0.01 | 0.08 ± 0.01 | / | |
| r2 | 0.87 | 0.80 | / | |
| NS | 0.81 | 0.27 | / | |
| Whole period | m ± δm | 0.81 ± 0.04 | 0.44 ± 0.02 | / |
| q ± δq [m3/m3] | 0.04 ± 0.01 | 0.11 ± 0.01 | / | |
| r2 | 0.72 | 0.67 | / | |
| NS | 0.69 | −0.27 | / |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Strati, V.; Albéri, M.; Anconelli, S.; Baldoncini, M.; Bittelli, M.; Bottardi, C.; Chiarelli, E.; Fabbri, B.; Guidi, V.; Raptis, K.G.C.; et al. Modelling Soil Water Content in a Tomato Field: Proximal Gamma Ray Spectroscopy and Soil–Crop System Models. Agriculture 2018, 8, 60. https://doi.org/10.3390/agriculture8040060
Strati V, Albéri M, Anconelli S, Baldoncini M, Bittelli M, Bottardi C, Chiarelli E, Fabbri B, Guidi V, Raptis KGC, et al. Modelling Soil Water Content in a Tomato Field: Proximal Gamma Ray Spectroscopy and Soil–Crop System Models. Agriculture. 2018; 8(4):60. https://doi.org/10.3390/agriculture8040060
Chicago/Turabian StyleStrati, Virginia, Matteo Albéri, Stefano Anconelli, Marica Baldoncini, Marco Bittelli, Carlo Bottardi, Enrico Chiarelli, Barbara Fabbri, Vincenzo Guidi, Kassandra Giulia Cristina Raptis, and et al. 2018. "Modelling Soil Water Content in a Tomato Field: Proximal Gamma Ray Spectroscopy and Soil–Crop System Models" Agriculture 8, no. 4: 60. https://doi.org/10.3390/agriculture8040060
APA StyleStrati, V., Albéri, M., Anconelli, S., Baldoncini, M., Bittelli, M., Bottardi, C., Chiarelli, E., Fabbri, B., Guidi, V., Raptis, K. G. C., Solimando, D., Tomei, F., Villani, G., & Mantovani, F. (2018). Modelling Soil Water Content in a Tomato Field: Proximal Gamma Ray Spectroscopy and Soil–Crop System Models. Agriculture, 8(4), 60. https://doi.org/10.3390/agriculture8040060