
CFD Simulation and Experimental Study on Coupled Motion Response of Ship with Tank in Beam Waves

Abstract
:1. Introduction
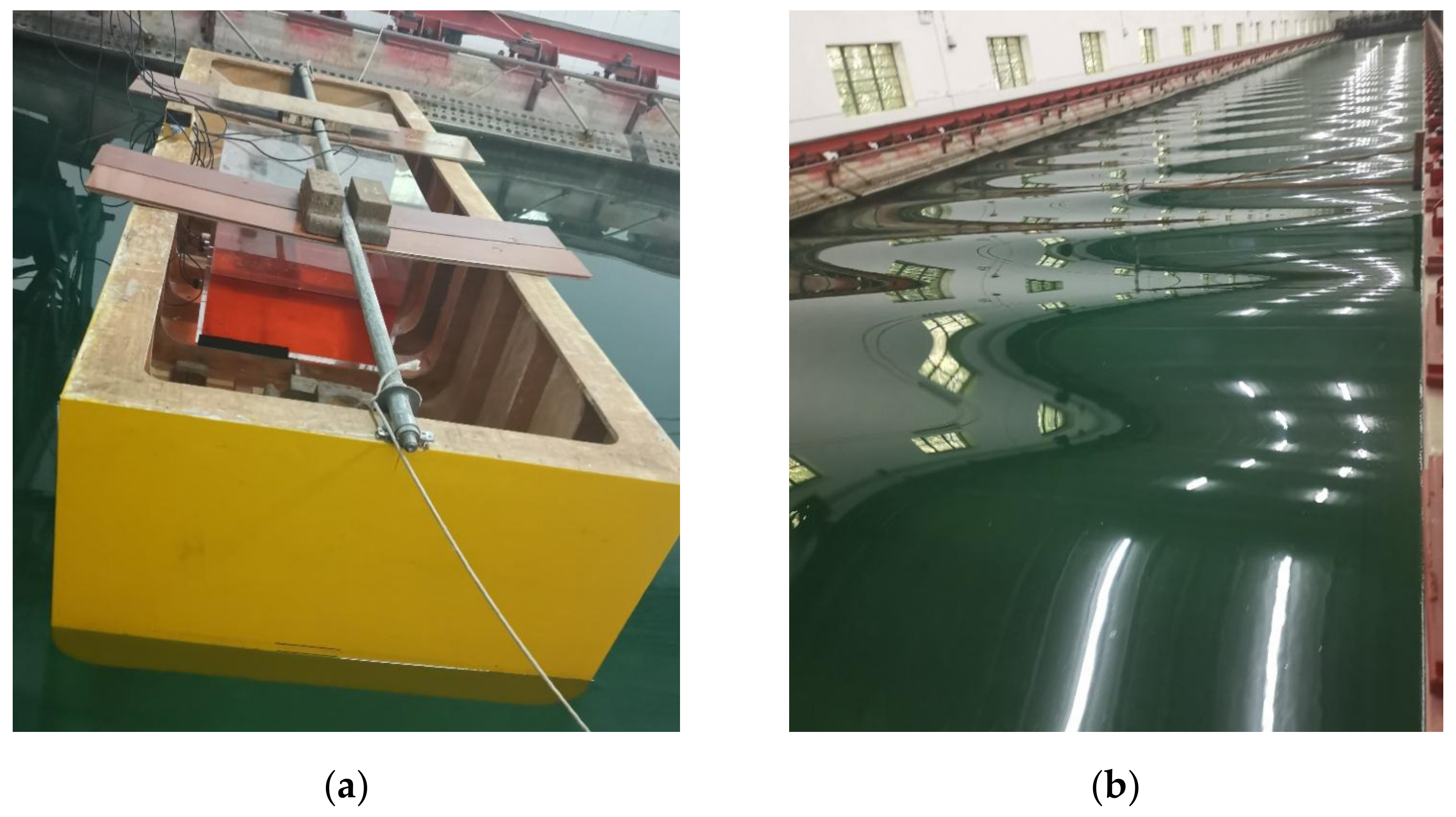
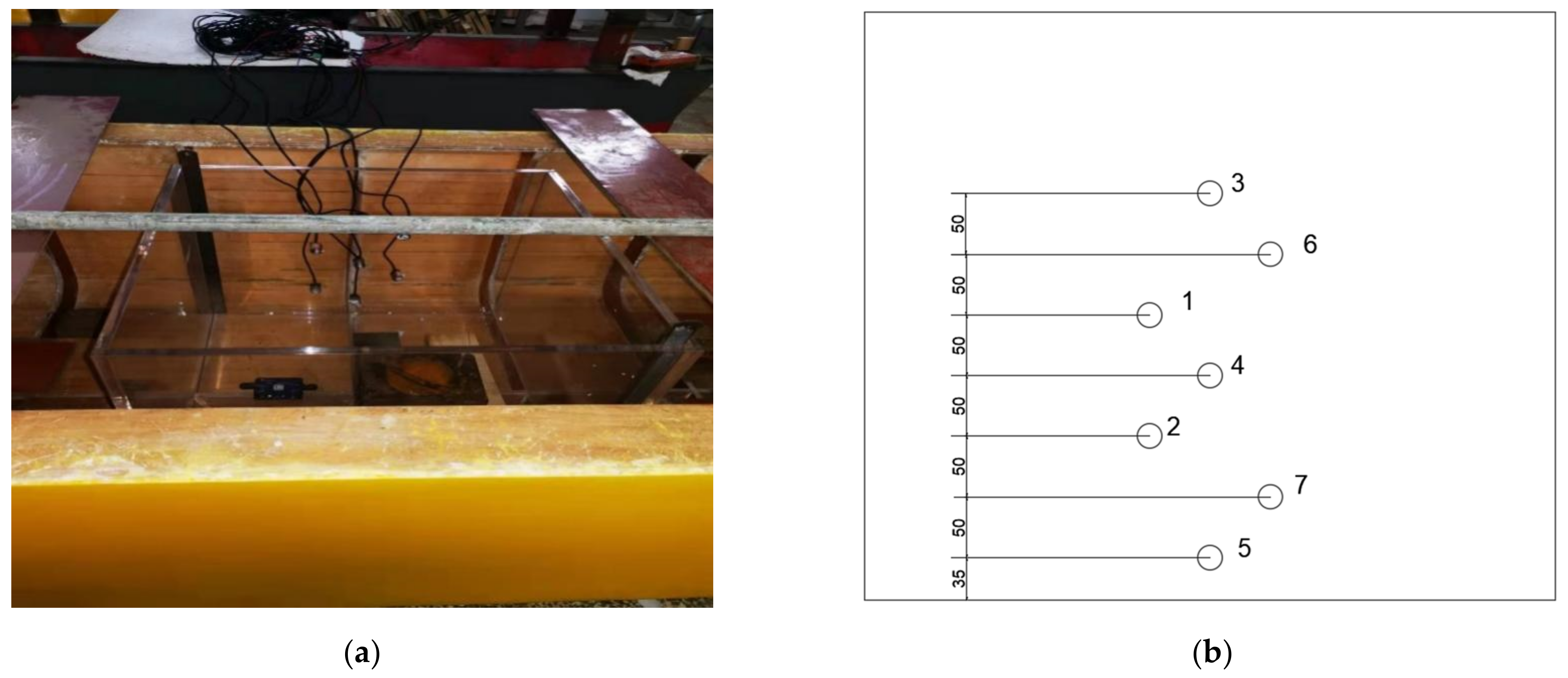
2. Model Test
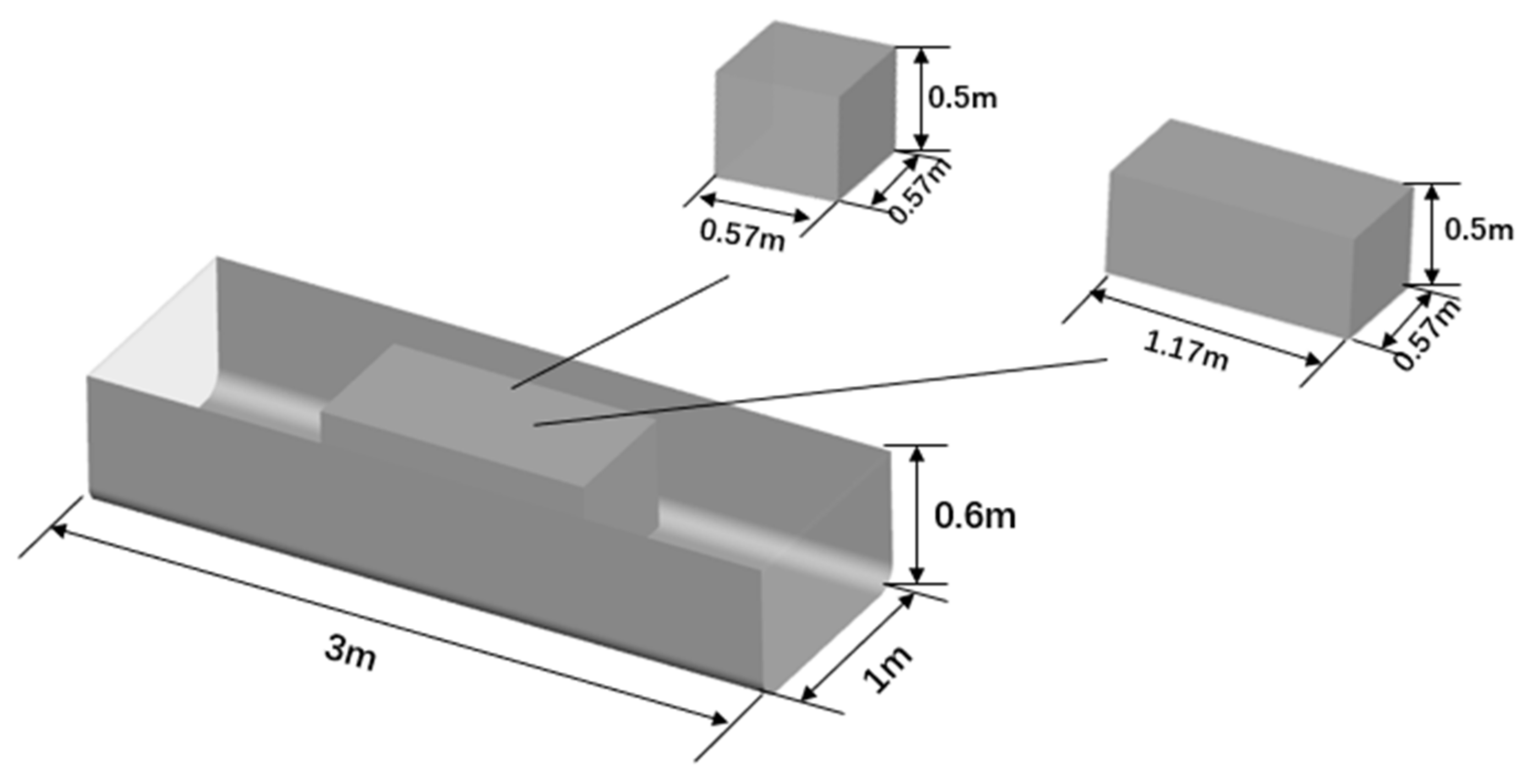
2.1. Ship Geometry
2.2. Working Conditions
3. Numerical Modelling
3.1. Governing Equations and Turbulent Model
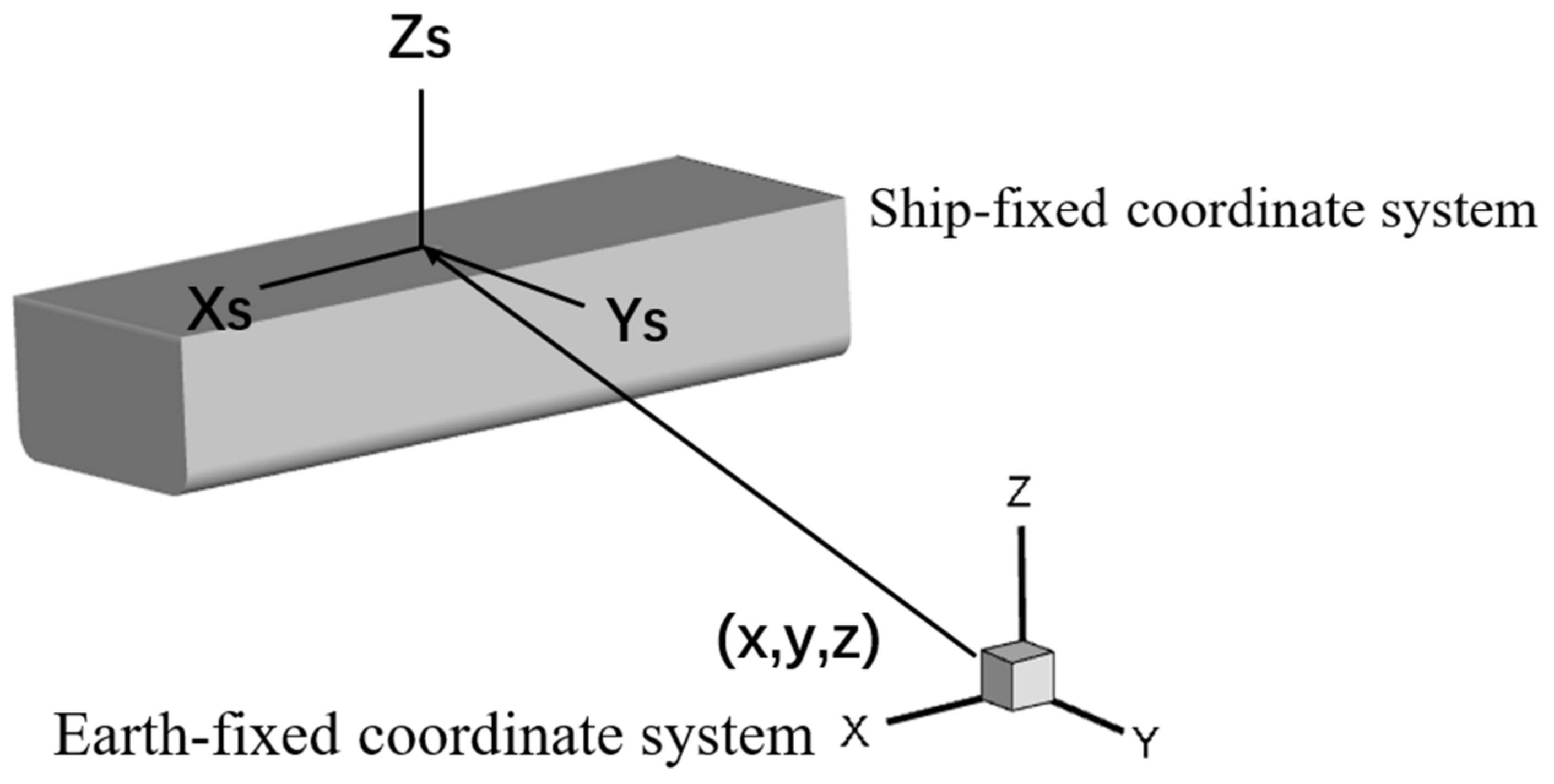
3.2. Coordinate Systems and Ship Motion Equation
3.3. Level-Set Method
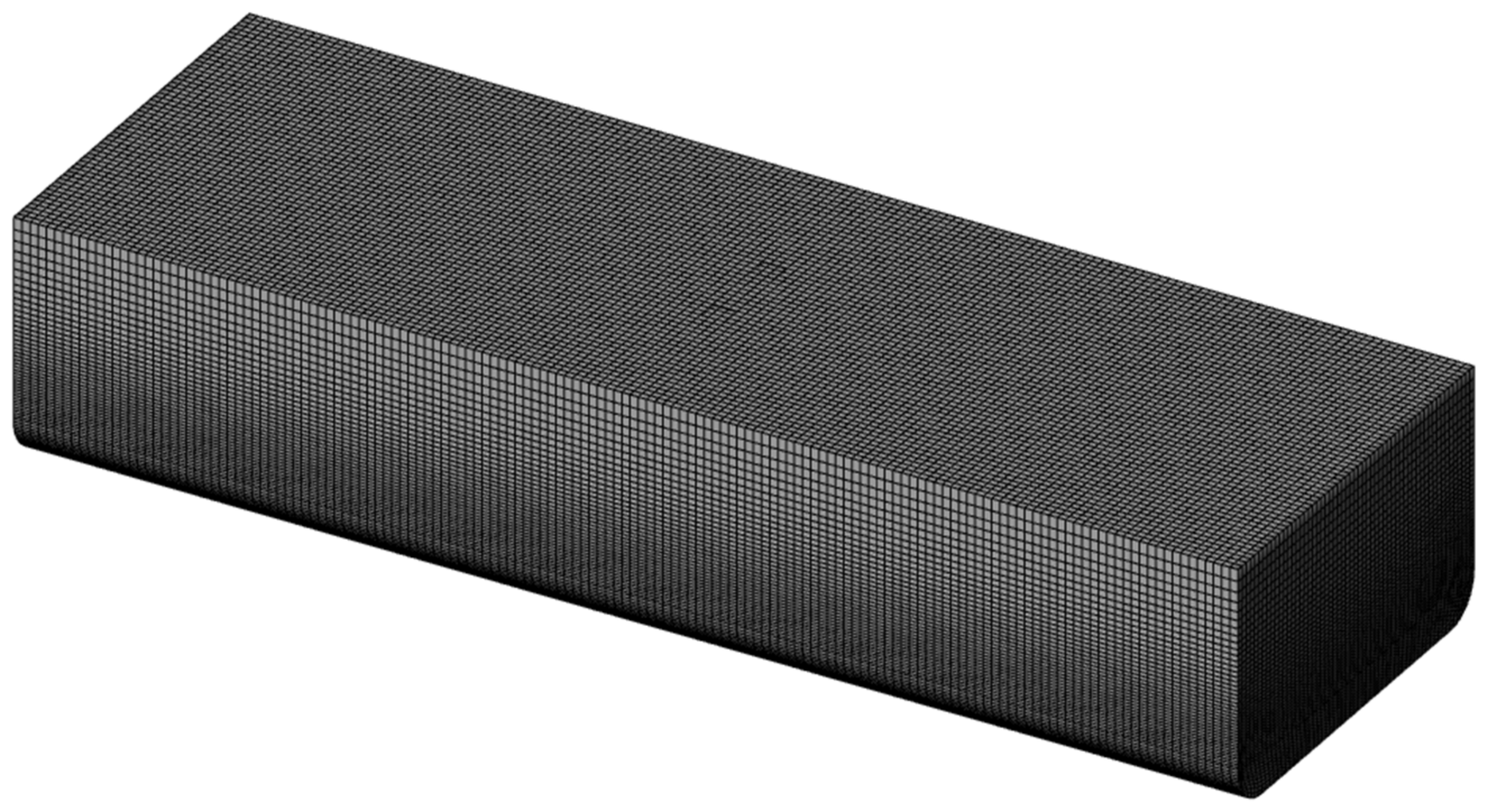
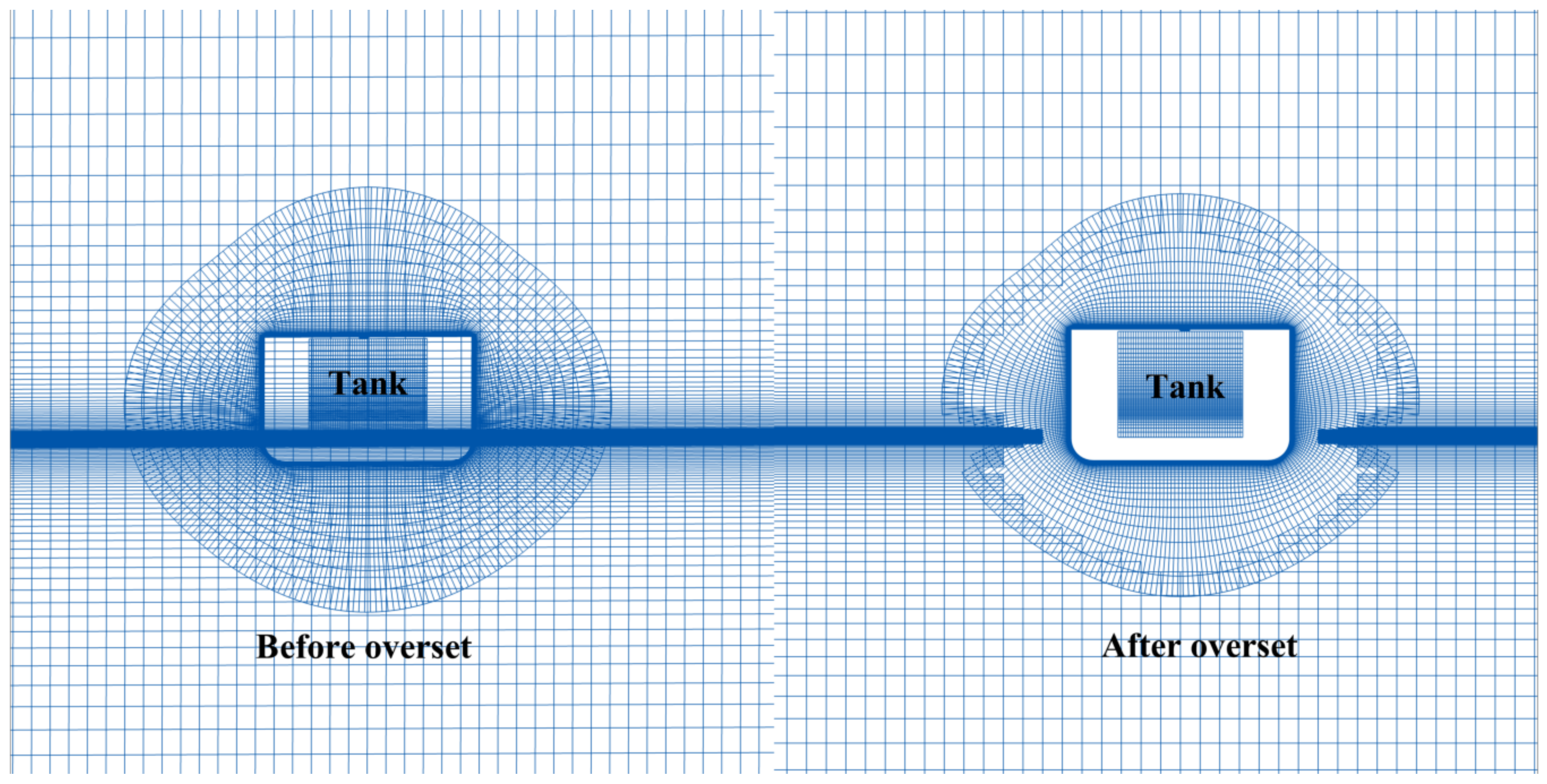
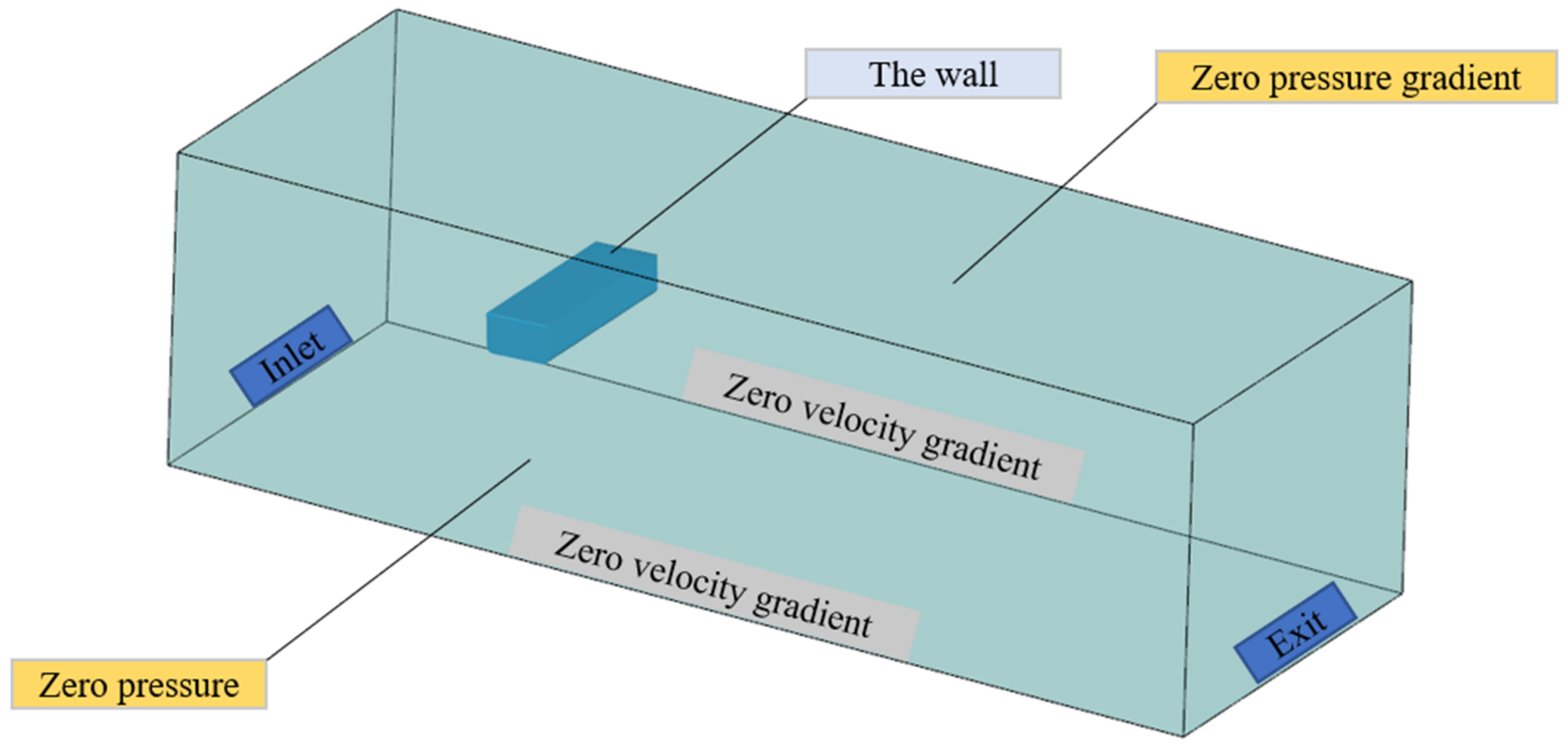
3.4. Computational Domain and Boundary Conditions
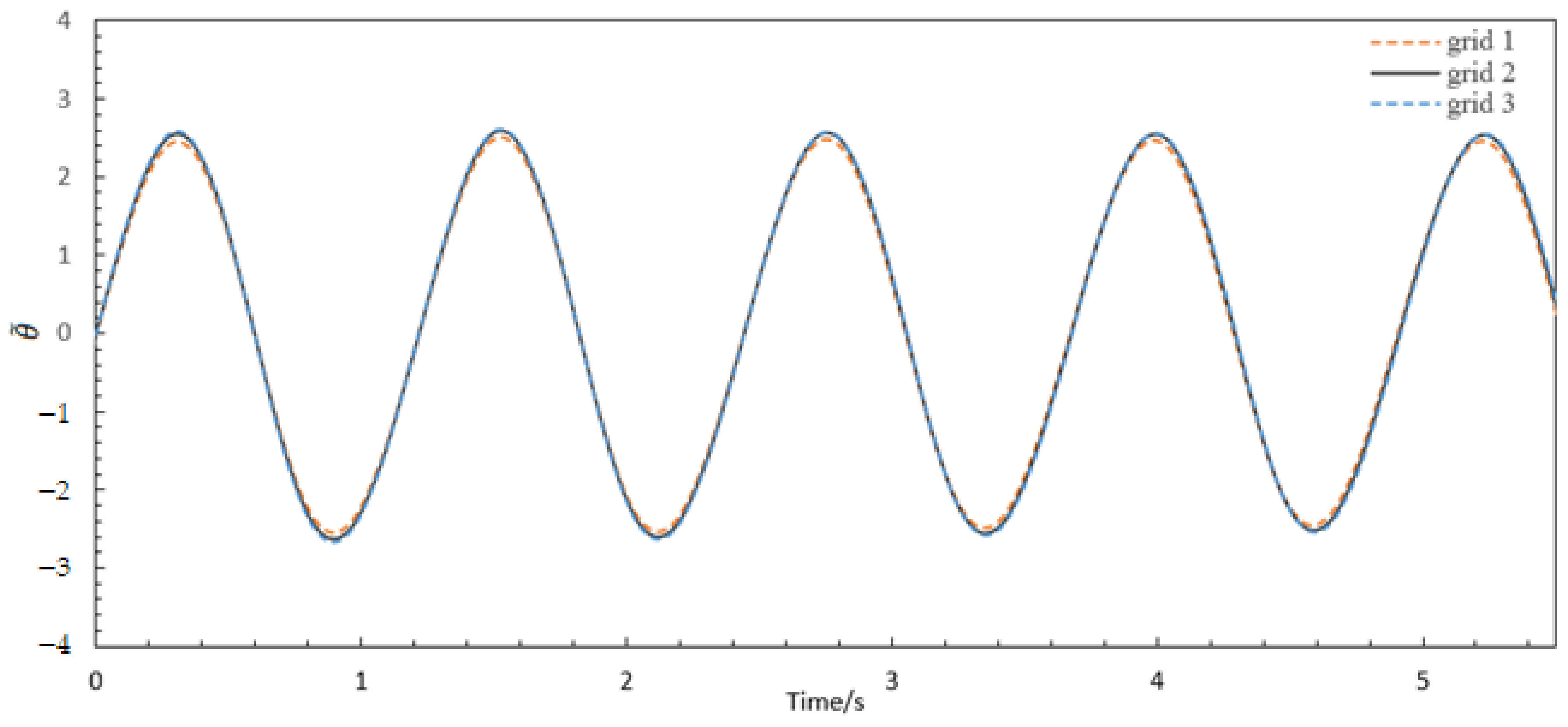
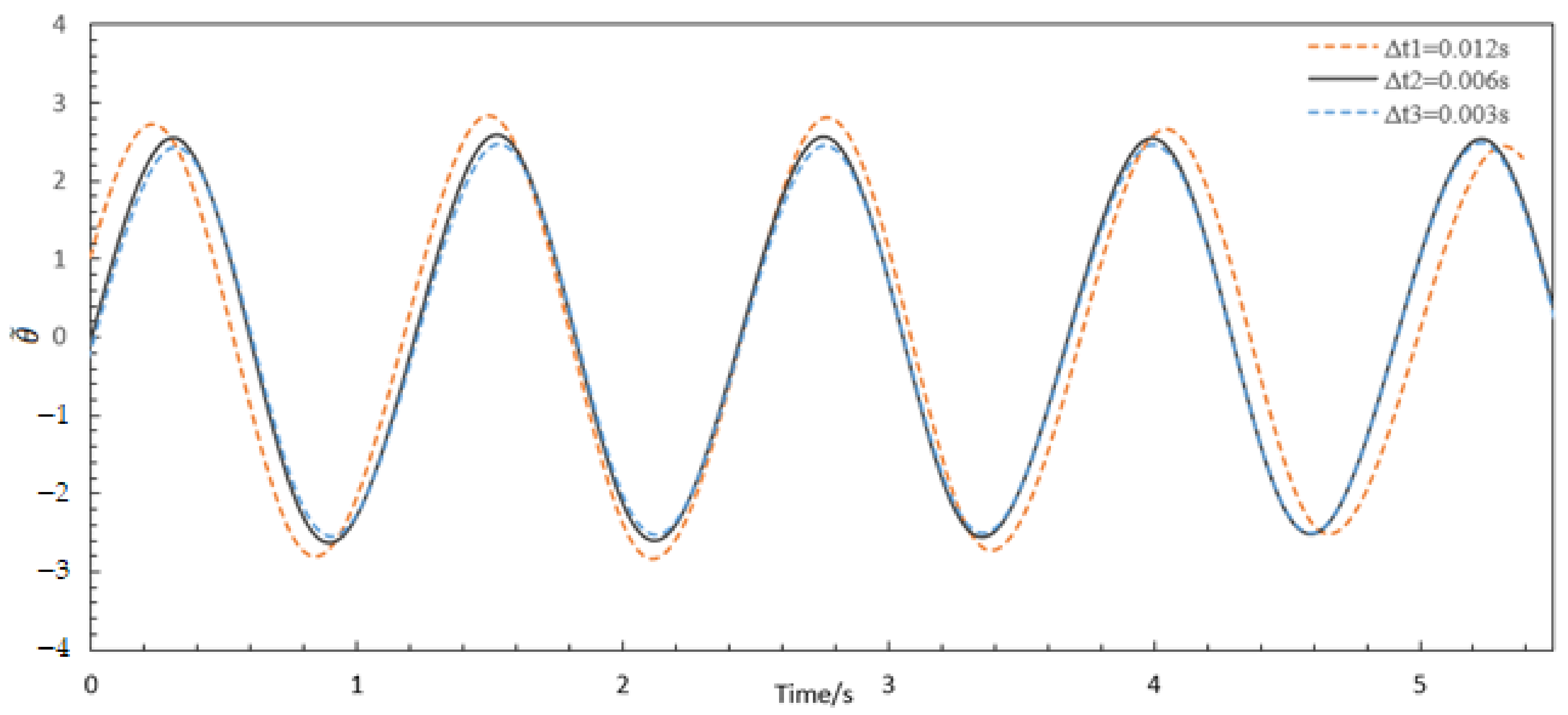
3.5. Grid and Time Step Studies
4. Result and Discussion
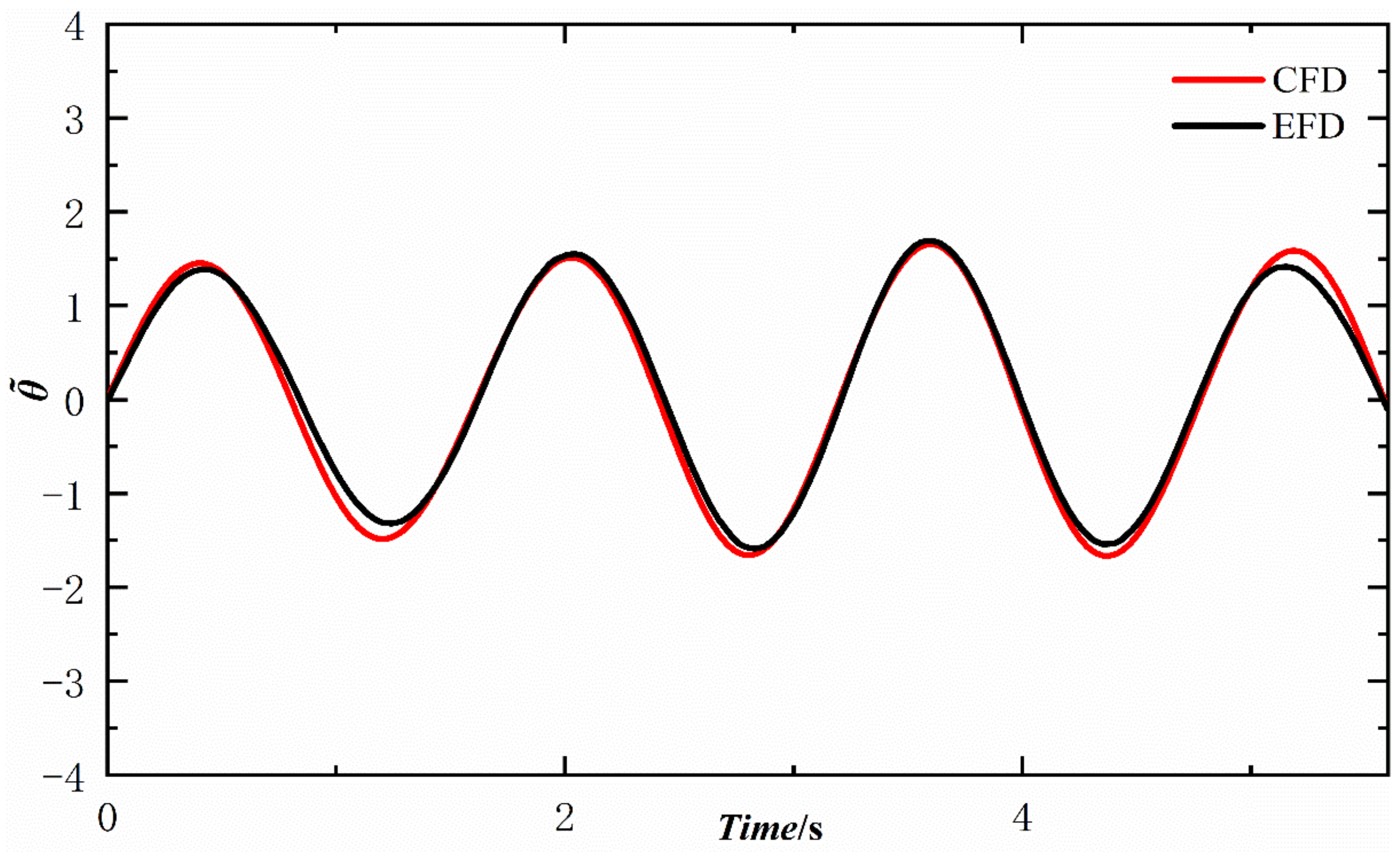
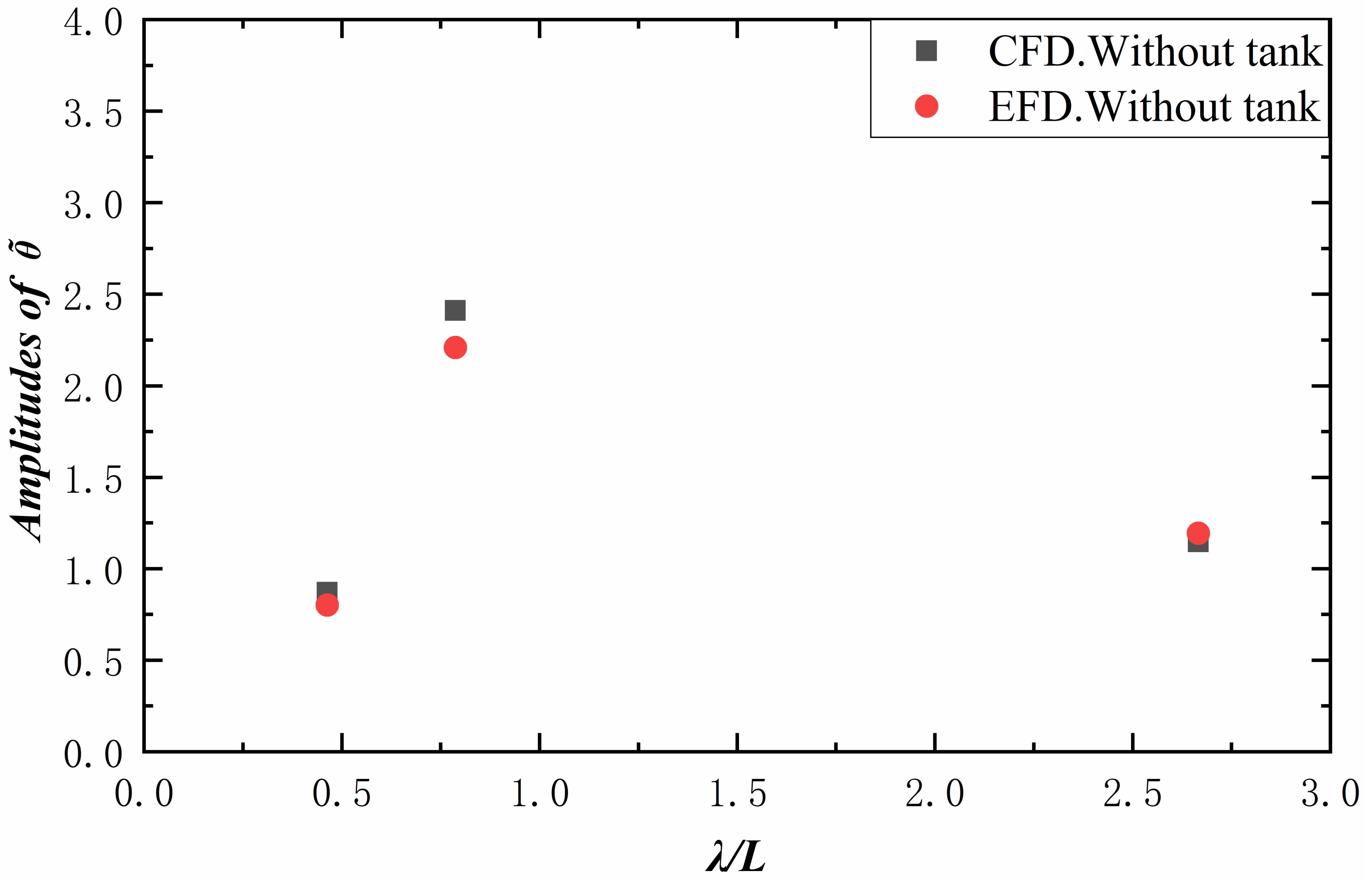
4.1. Validation
4.2. Effect of the Parameters of the Tank
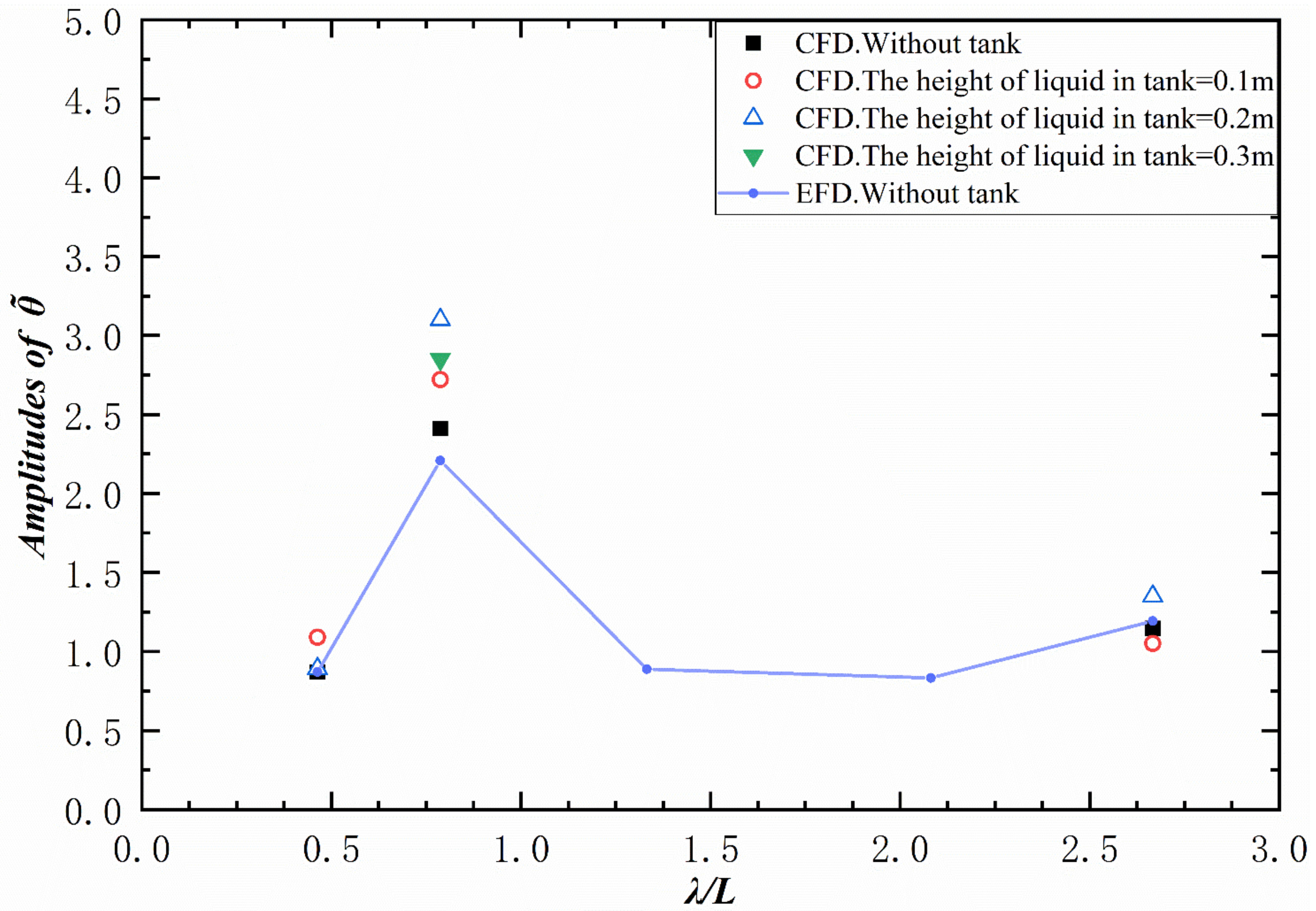
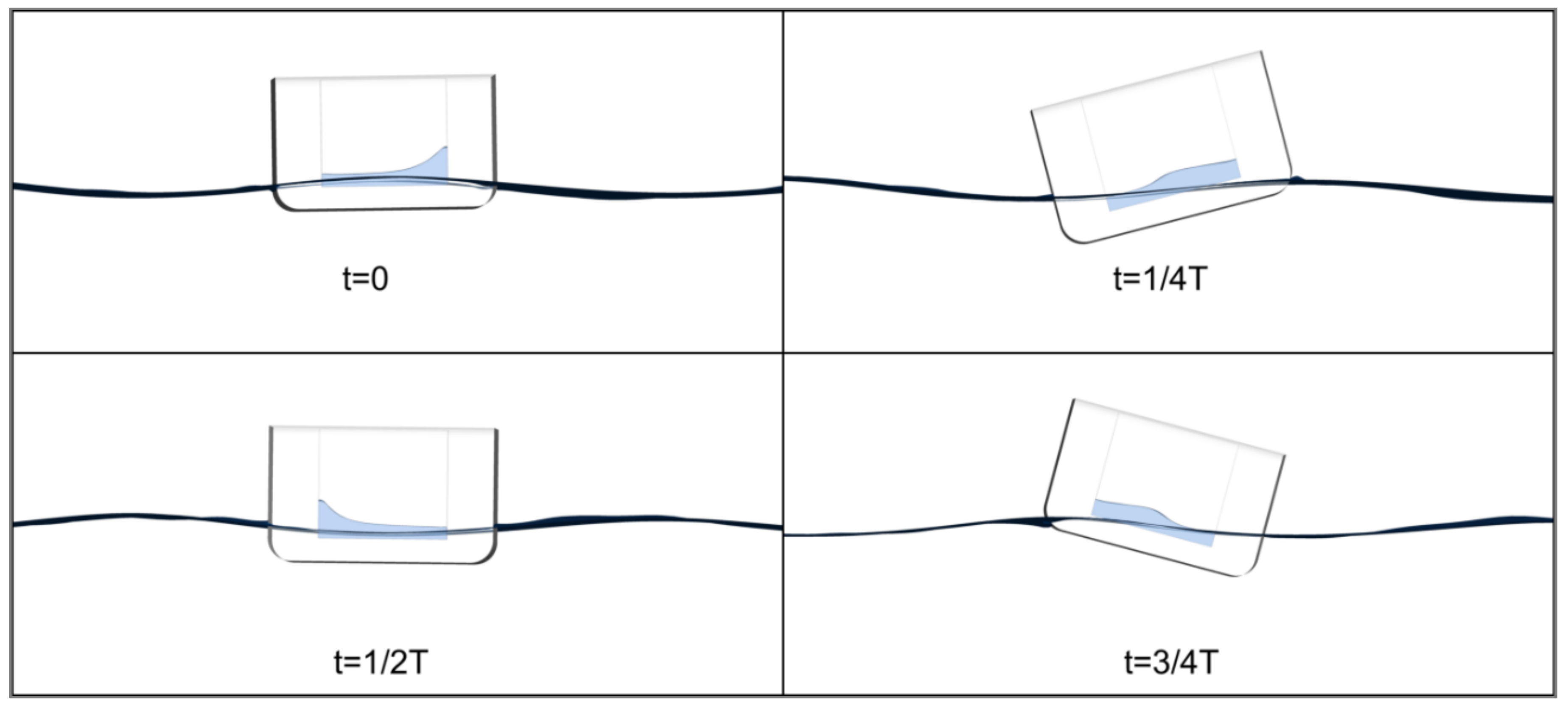
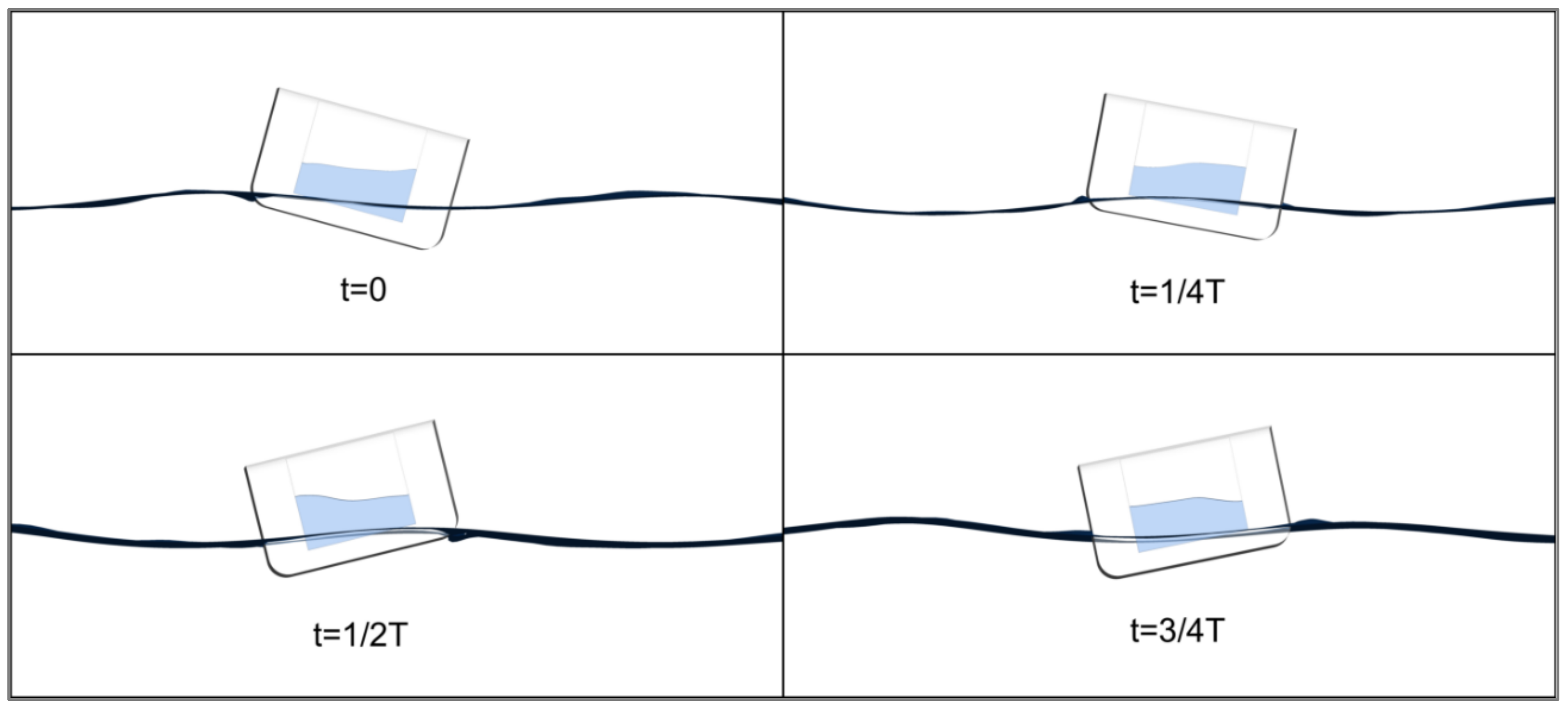
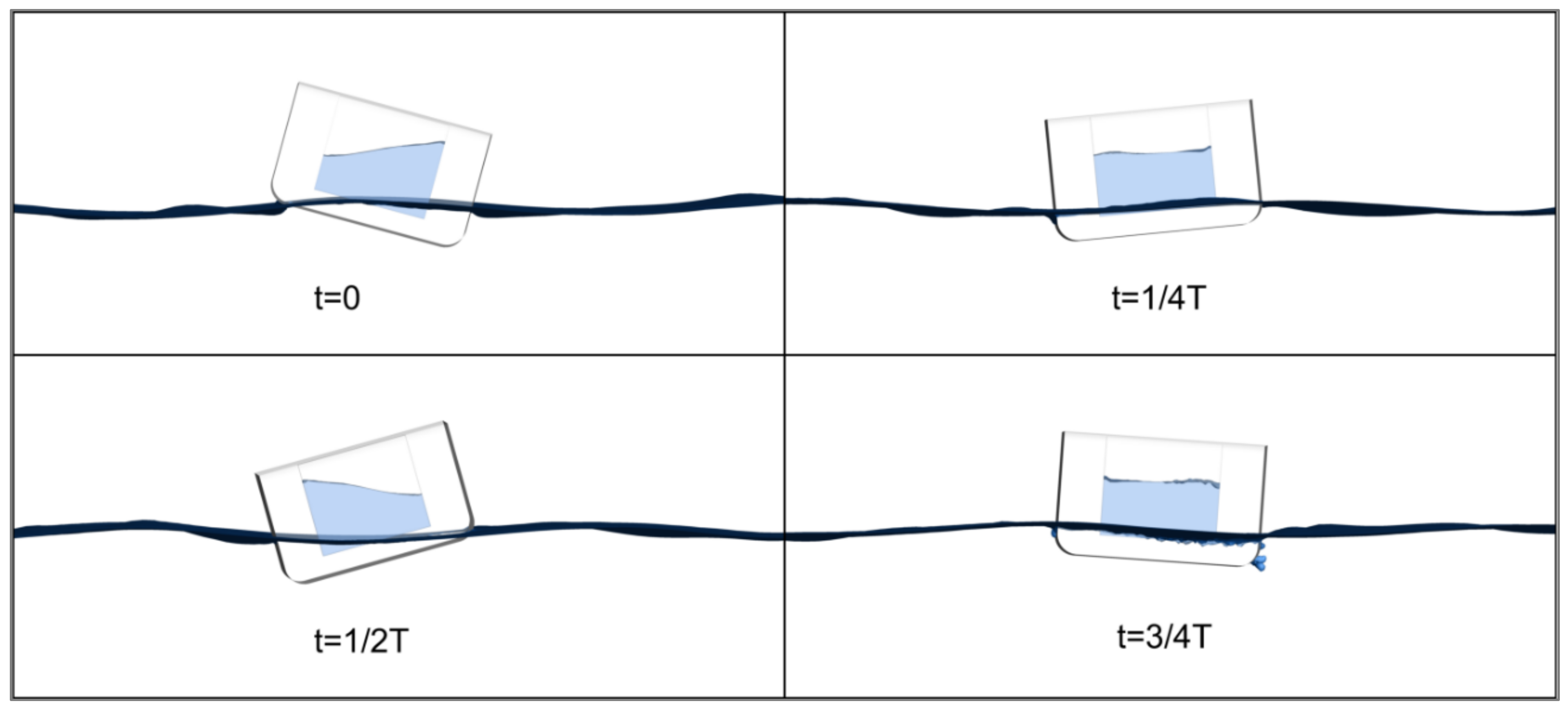
4.2.1. Effect of Fill Levels inside the Tank
- The ship is without the tank;
- The ship with a tank of 0.57 × 0.57 × 0.5 m, and the liquid level height in the tank is 0.1 m;
- The ship with a tank of 0.57 × 0.57 × 0.5 m, and the liquid level height in the tank is 0.2 m;
- The ship with a tank of 0.57 × 0.57 × 0.5 m, and the liquid level height in the tank is 0.3 m.
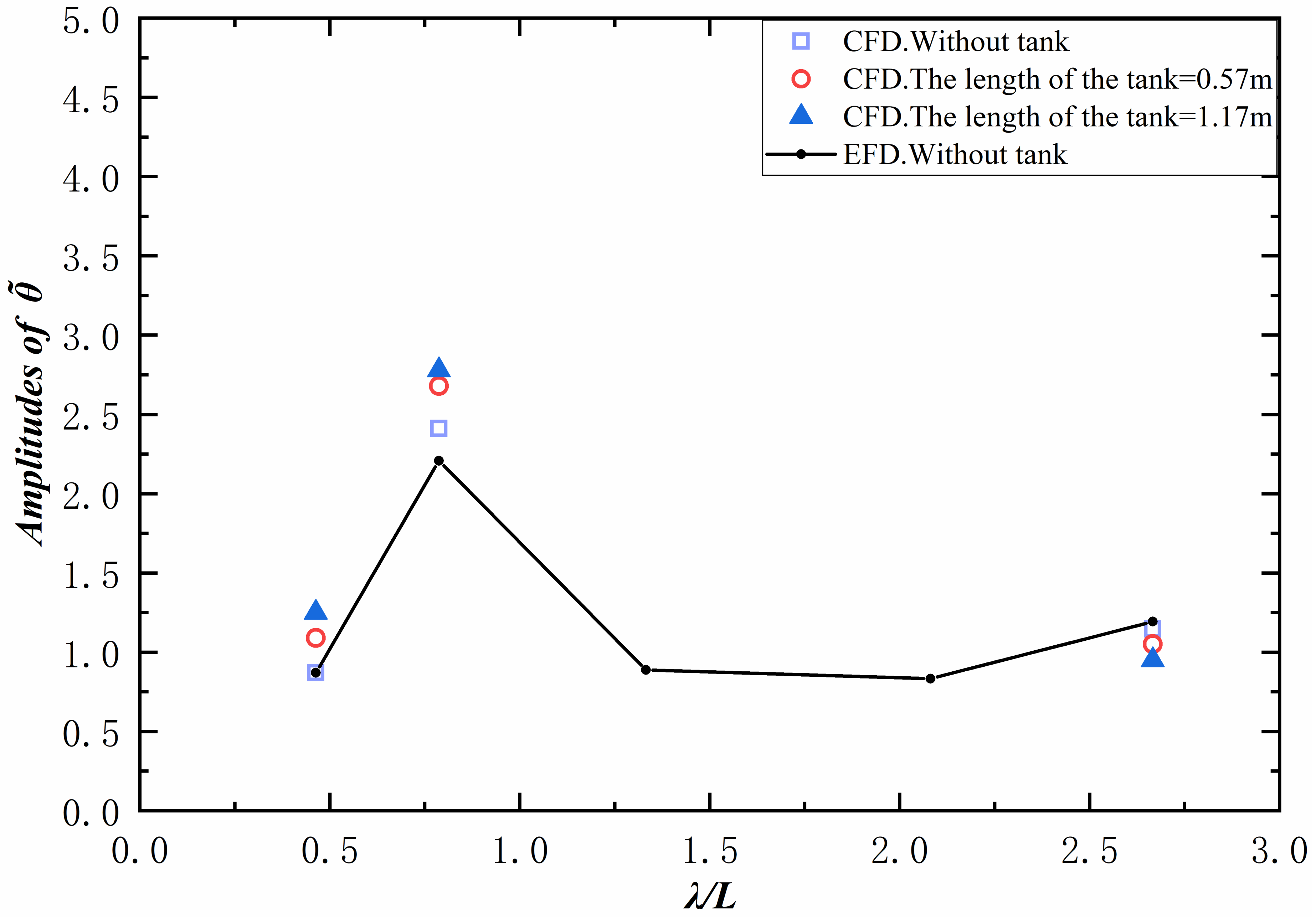
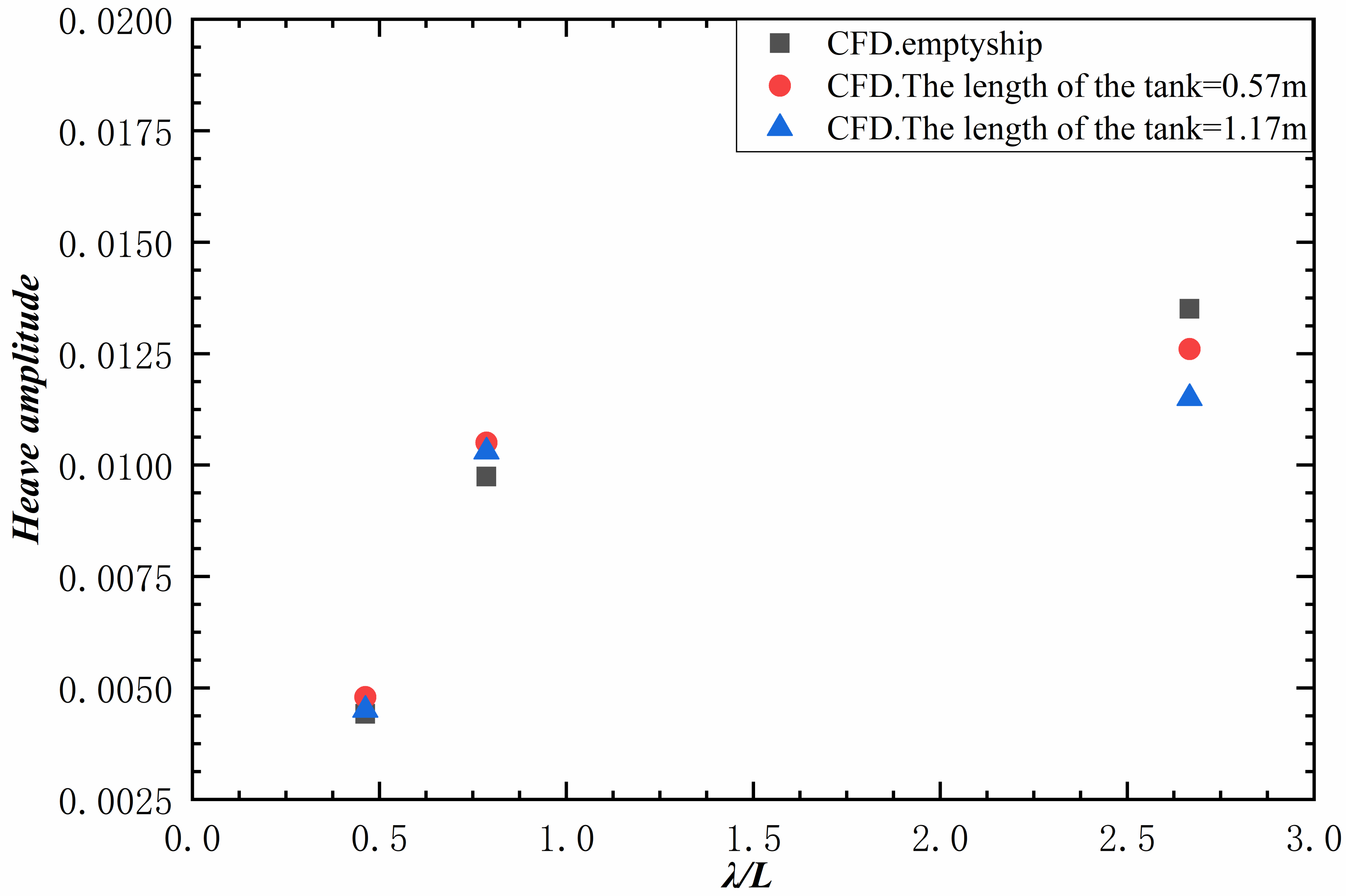
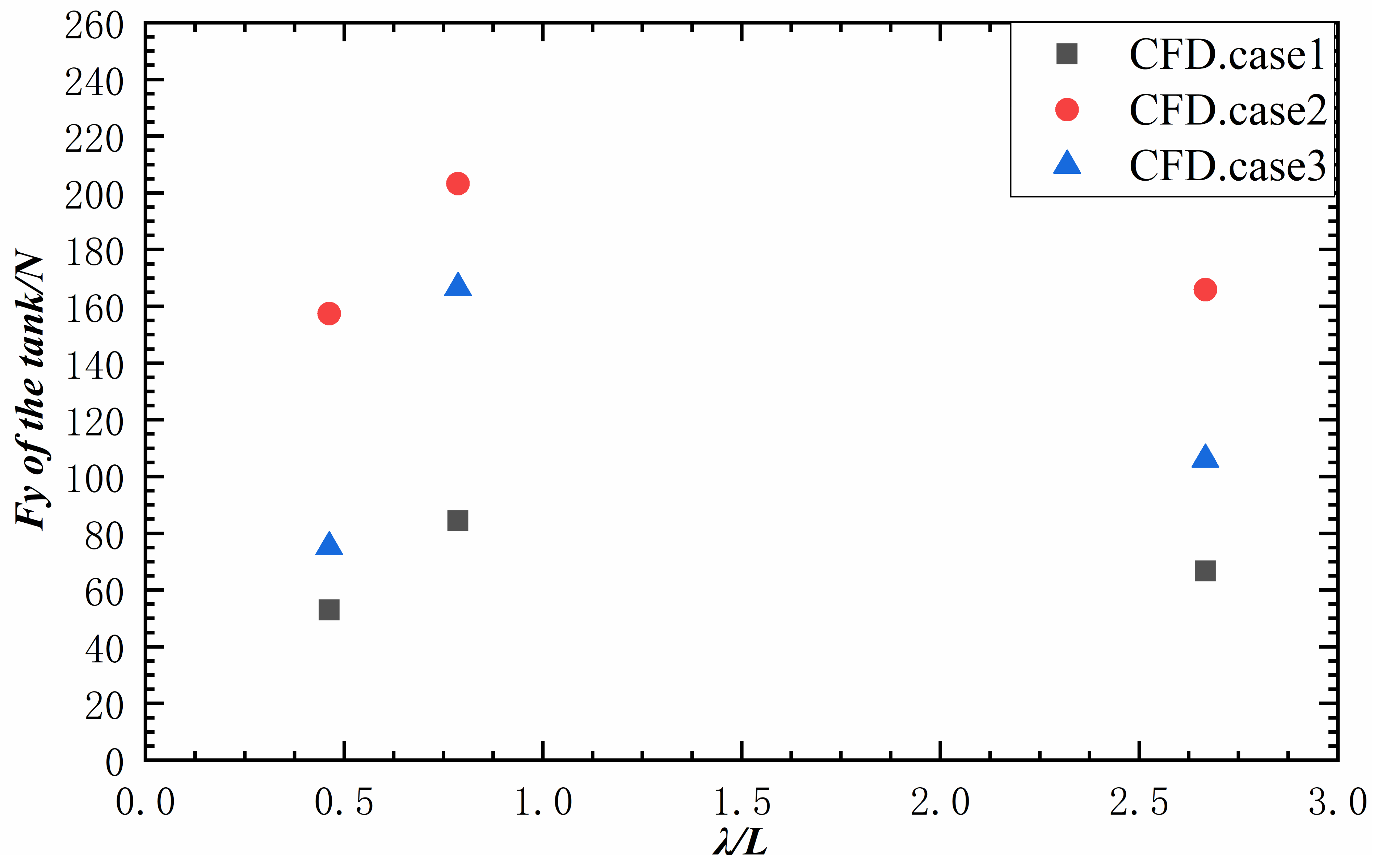
4.2.2. Effect of Tank Length
- The ship is without the tank;
- The ship with a tank of 0.57 × 0.57 × 0.5 m, and the liquid level height in the tank is 0.1 m;
- The ship with a tank of 0.57 × 1.17 × 0.5 m, and the liquid level height in the tank is 0.1 m.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abramson, H.N. The Dynamic Behavior of Liquids in Moving Containers; NASA SP-106; NASA Special Publication: Washington, DC, USA, 1966; p. 106. [Google Scholar]
- Ikeda, T.; Nakagawa, N. Non-Linear Vibrations of A Structure Caused By Water Sloshing In A Rectangular Tank. J. Sound Vib. 1997, 201, 23–41. [Google Scholar] [CrossRef]
- Faltinsen, O.M.; Rognebakke, O.F.; Lukovsky, I.A.; Timokha, A.N. Multidimensional modal analysis of nonlinear sloshing in a rectangular tank with finite water depth. J. Fluid Mech. 2000, 407, 201–234. [Google Scholar] [CrossRef]
- Faltinsen, O.M.; Timokha, A.N. An adaptive multimodal approach to nonlinear sloshing in a rectangular tank. J. Fluid Mech. 2001, 432, 167–200. [Google Scholar] [CrossRef] [Green Version]
- Nasar, T.; Sannasiraj, S.A. Sloshing dynamics and performance of porous baffle arrangements in a barge carrying liquid tank. Ocean Eng. 2019, 183, 24–39. [Google Scholar] [CrossRef]
- Nasar, T.; Sannasiraj, S.A.; Sundar, V. Motion responses of barge carrying liquid tank. Ocean Eng. 2010, 37, 935–946. [Google Scholar] [CrossRef]
- Shuya, W.; Zhiqiang, H.; Gang, C. Research on Tank Sloshing and Coupling Effects on Global Roll Motion of an FLNG System. China Offshore Platf. 2015, 30, 84–92. [Google Scholar]
- Lee, J.; Ahn, Y.; Kim, Y. Experimental study on effect of density ratio and phase transition during sloshing impact in rectangular tank. Ocean Eng. 2021, 242, 110105. [Google Scholar] [CrossRef]
- Gurusamy, S.; Kumar, D. Experimental study on nonlinear sloshing frequency in shallow water tanks under the effects of excitation amplitude and dispersion parameter. Ocean Eng. 2020, 213, 107761. [Google Scholar] [CrossRef]
- Bulian, G.; Cercos-Pita, J.L. Co-simulation of ship motions and sloshing in tanks. Ocean Eng. 2018, 152, 353–376. [Google Scholar] [CrossRef]
- Green, M.D.; Zhou, Y.; Dominguez, J.M.; Gesteira, M.G.; Peiró, J. Smooth particle hydrodynamics simulations of long-duration violent three-dimensional sloshing in tanks. Ocean Eng. 2021, 229, 108925. [Google Scholar] [CrossRef]
- Li, Y.L.; Zhu, R.C.; Miao, G.P.; Ju, F.A.N. Simulation of tank sloshing based on OpenFOAM and coupling with ship motions in time domain. J. Hydrodyn. Ser. B 2012, 24, 450–457. [Google Scholar] [CrossRef]
- Jiang, S.C.; Teng, B.; Bai, W.; Gou, Y. Numerical simulation of coupling effect between ship motion and liquid sloshing under wave action. Ocean Eng. 2015, 108, 140–154. [Google Scholar] [CrossRef]
- Seo, M.; Kim, Y.; Park, D. Effect of internal sloshing on added resistance of ship. J. Hydrodyn. Ser. B 2017, 29, 13–26. [Google Scholar] [CrossRef]
- Su, Y.; Liu, Z.Y. Coupling effects of barge motion and sloshing. Ocean Eng. 2017, 140, 352–360. [Google Scholar] [CrossRef]
- Shah, Z.; Sheikholeslami, M.; Kumam, P.; Shutaywi, M.; Thounthong, P. CFD Simulation of Water-Based Hybrid Nanofluid Inside a Porous Enclosure Employing Lorentz Forces. IEEE Access 2019, 7, 177177–177186. [Google Scholar] [CrossRef]
- Fatinsen, O.M. A numerical nolinear method of sloshing in tanks with two-dimensional flow. J. Ship Res. 1978, 3, 193–202. [Google Scholar] [CrossRef]
- Wang, X.; Liu, L.; Zhang, Z.; Feng, D. Numerical Study of the Stern Flap Effect on Catamaran’ Seakeeping Characteristic in Regular Head Waves. Ocean Eng. 2020, 206, 107172. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; He, R.; Zhang, Z.; Feng, D. CFD prediction of stern flap effect on Catamaran seakeeping behavior in long crest head wave. Appl. Ocean Res. 2020, 104, 102367. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef] [Green Version]
- Carrica, P.M.; Wilson, R.V.; Noack, R.W.; Stern, F. Ship motions using single-phase level set with dynamic overset grids. Comput. Fluids 2007, 36, 1415–1433. [Google Scholar] [CrossRef]
- Mascio, A.D.; Broglia, R.; Muscari, R. On the application of the single-phase level set method to naval hydrodynamic flows. Comput. Fluids 2007, 36, 868–886. [Google Scholar] [CrossRef]
- Rossi, R.; Larese, A.; Dadvand, P.; Oñate, E. An efficient edge-based level set finite element method for free surface flow problems. Int. J. Numer. Methods Fluids 2013, 71, 687–716. [Google Scholar] [CrossRef]
- Burg, C.O.E. Single-phase level set simulations for unstructured incompressible flows. In Proceedings of the 17th AIAA Computational Fluid Dynamics Conference, Toronto, ON, Canada, 6–9 June 2005. [Google Scholar]
- Li, T.; Yan, C. Investigation of automatic generation technique for two-dimensional DRAGON grid. Acta Aerodyn. Sin. 2005, 23, 88–92. [Google Scholar]
- Zhang, Z.; Guo, L.; Wei, P.; Wang, X.; Feng, D. Numerical Simulation of Submarine Surfacing Motion in Regular Waves. Iran. J. Sci. Technol. Trans. Mech. Eng. 2020, 44, 359–372. [Google Scholar] [CrossRef]
- ITTC. International Towing Tank Conference. In Proceedings of the CFD General Uncertainty Analysis, Verification and Validation Methods and Procedures, Venice, Italy, 8–14 September 2002. [Google Scholar]
- Celik, I.B.; Ghia, U.; Roache, P.J.; Freitas, C.J. Procedure for Estimation and Reporting of Uncertainty Due to Discretization in CFD Applications. J. Fluids Eng. 2008, 130, 7. [Google Scholar]
- Lyu, W.; Riesner, M.; Peters, A.; el Moctar, O. A hybrid method for ship response coupled with sloshing in partially filled tanks. Mar. Struct. 2019, 67, 102643. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tank | Length | 0.57 m/1.17 m |
| Width | 0.57 m | |
| Height | 0.5 m | |
| Liquid level height | 0.1 m/0.2 m | |
| Hull | Length | 3 m |
| Width | 1 m | |
| Height | 0.6 m | |
| Draft | 0.1 m | |
| Displacement | 0.3781 t | |
| Crosswise moment of inertia | 33.53 kg.m2 |
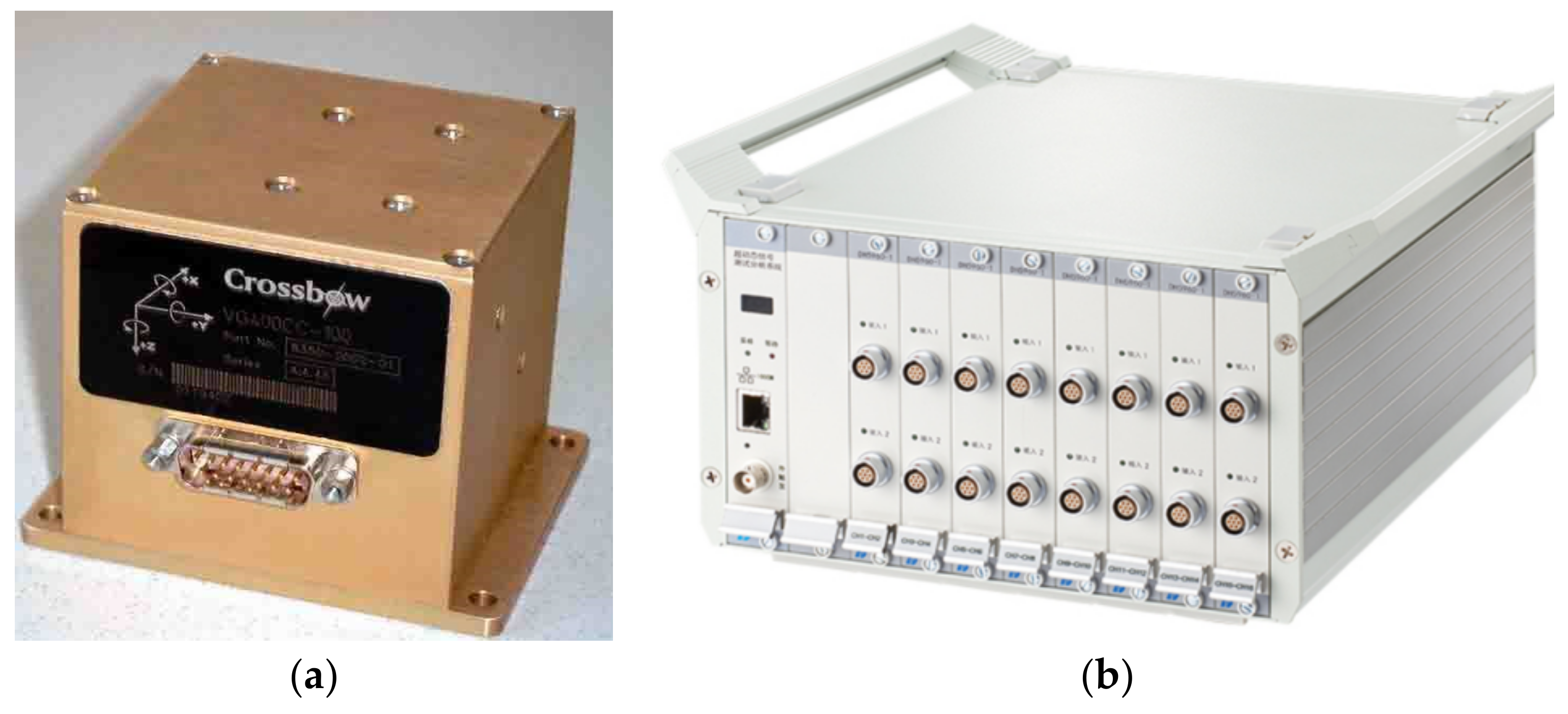
| Angle measuring instrument | type number | VG440 |
| Measured parameters | Roll | |
| Range of measurement | ±90° | |
| Static precision | 0.5% F.S. | |
| Pressure transducer | type number | CYY28 |
| Range of measurement | 0–20 kpa | |
| Precision | 0.5% |
| Wavelength/m | Wave Period/s | EFD | CFD | |
|---|---|---|---|---|
| Without Tank | 1.390 | 0.944 | √ | √ |
| 2.362 | 1.230 | √ | √ | |
| 3.997 | 1.600 | √ | ||
| 6.245 | 2.000 | √ | ||
| 8.000 | 2.264 | √ | √ | |
| Tank size: 0.57 m × 0.57 m × 0.5 m The height of water in the tank: 0.1 m | 1.390 | 0.944 | √ | √ |
| 2.362 | 1.230 | √ | √ | |
| 3.997 | 1.600 | √ | ||
| 6.245 | 2.000 | √ | ||
| 8.000 | 2.264 | √ | √ | |
| Tank size: 0.57 m × 0.57 m × 0.5 m The height of water in the tank: 0.2 m | 1.390 | 0.944 | √ | √ |
| 2.362 | 1.230 | √ | √ | |
| 3.997 | 1.600 | √ | ||
| 6.245 | 2.000 | √ | ||
| 8.000 | 2.264 | √ | √ | |
| Tank size: 1.17 m × 0.57 m × 0.5 m The height of water in the tank: 0.1 m | 1.390 | 0.944 | √ | √ |
| 2.362 | 1.230 | √ | √ | |
| 3.997 | 1.600 | √ | ||
| 6.245 | 2.000 | √ | ||
| 8.000 | 2.264 | √ | √ |
| Grid Case | Grid Number | Error (Middle%) | |
|---|---|---|---|
| Grid 1 | 3.29 million | 2.475 | −4.03 |
| Grid 2 | 6.71 million | 2.579 | − |
| Grid 3 | 13.53 million | 2.593 | 0.54 |
| Time Case | Δt | Error (Middle%) | |
|---|---|---|---|
| Δt1 | 0.012 s | 2.803 | 8.69 |
| Δt2 | 0.006 s | 2.579 | − |
| Δt3 | 0.003 s | 2.511 | −2.64 |
| 13.53 M, 6.71 M, 3.29 M | |
| 2.593 | |
| 2.579 | |
| 2.475 | |
| 8.677 | |
| 2.595 | |
| 0.540% | |
| 0.084% | |
| 0.105% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, T.; Feng, D.; Liu, L.; Wang, X.; Jiang, H. CFD Simulation and Experimental Study on Coupled Motion Response of Ship with Tank in Beam Waves. J. Mar. Sci. Eng. 2022, 10, 113. https://doi.org/10.3390/jmse10010113
He T, Feng D, Liu L, Wang X, Jiang H. CFD Simulation and Experimental Study on Coupled Motion Response of Ship with Tank in Beam Waves. Journal of Marine Science and Engineering. 2022; 10(1):113. https://doi.org/10.3390/jmse10010113
Chicago/Turabian StyleHe, Tao, Dakui Feng, Liwei Liu, Xianzhou Wang, and Hua Jiang. 2022. "CFD Simulation and Experimental Study on Coupled Motion Response of Ship with Tank in Beam Waves" Journal of Marine Science and Engineering 10, no. 1: 113. https://doi.org/10.3390/jmse10010113
APA StyleHe, T., Feng, D., Liu, L., Wang, X., & Jiang, H. (2022). CFD Simulation and Experimental Study on Coupled Motion Response of Ship with Tank in Beam Waves. Journal of Marine Science and Engineering, 10(1), 113. https://doi.org/10.3390/jmse10010113