
Traffic Organization Service for Maritime Autonomous Surface Ships (MASS) with Different Degrees of Autonomy

 , , ,
, , ,  and
and
Abstract
:1. Introduction
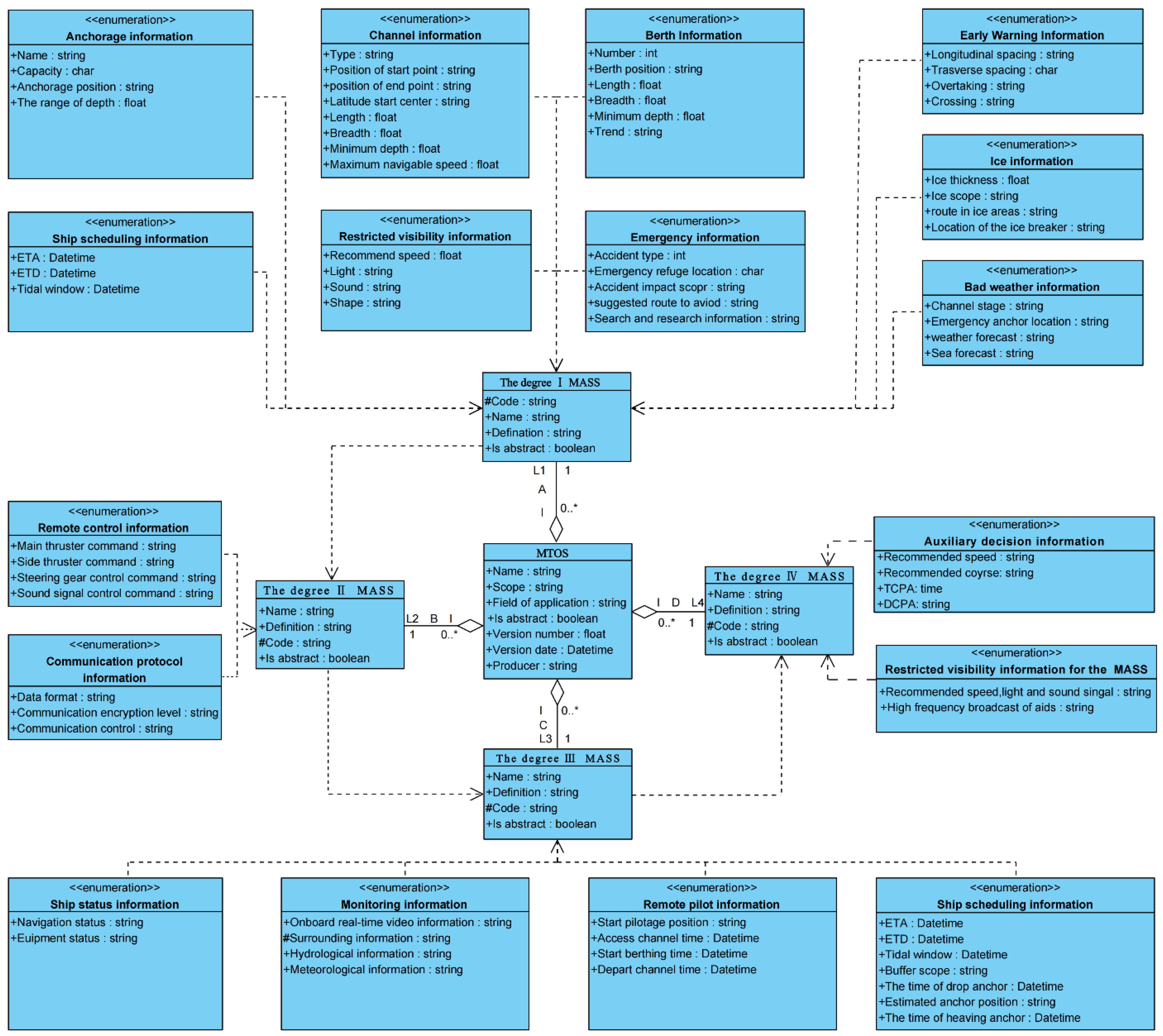
- Degree one: Ship with automated processes and decision support;
- Degree two: Remotely controlled ship with seafarers on board;
- Degree three: Remotely controlled ship without seafarers on board; and
- Degree four: Fully autonomous ship.
- We propose a notion of on-demand service for MASS with different DoA. We determine the traffic organization service information needs of MASS based on IMO’s description of MASS at each autonomous degree (including autonomous characteristics, whether shore-based assistance is required, and whether seafarers are on board) and analysis of the characteristics of MASS’s traffic organization service in the service process, service scope, and emergency response.
- We develop a new MS for MASS. It fills the gap that the traditional TOS of e-Navigation does not consider when providing services for MASS and gives a solution for VTS operators to provide traffic organization service for MASS.
- We demonstrate the good interpretability of our approach and provide a case study with deep insights. Our solution can provide traffic organization service for MASS according to its inbound and outbound processes and solve the problems of service delay and information redundancy.
2. Literature Review
3. Determine MTOS Information by the Demands of MASS
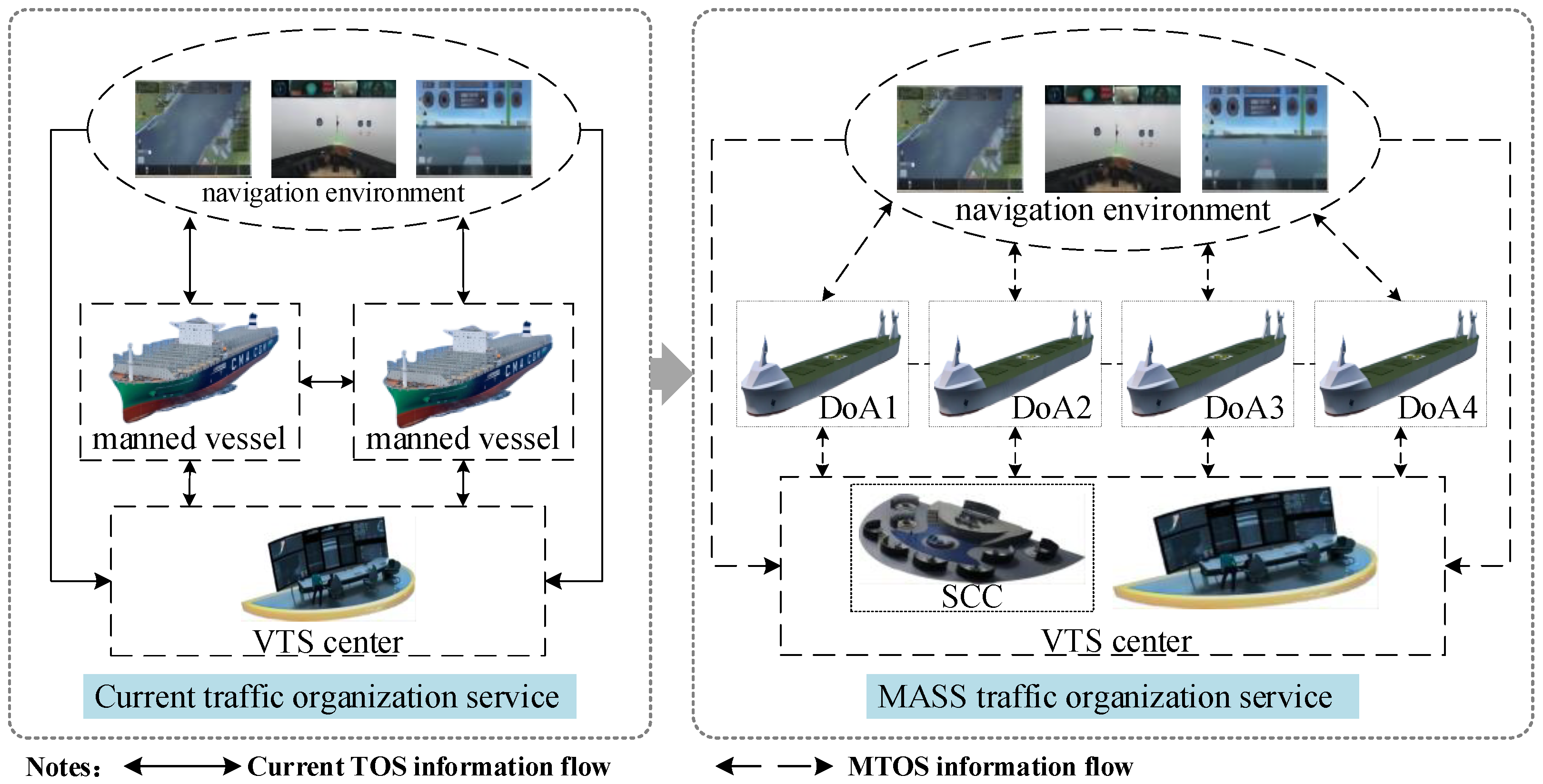
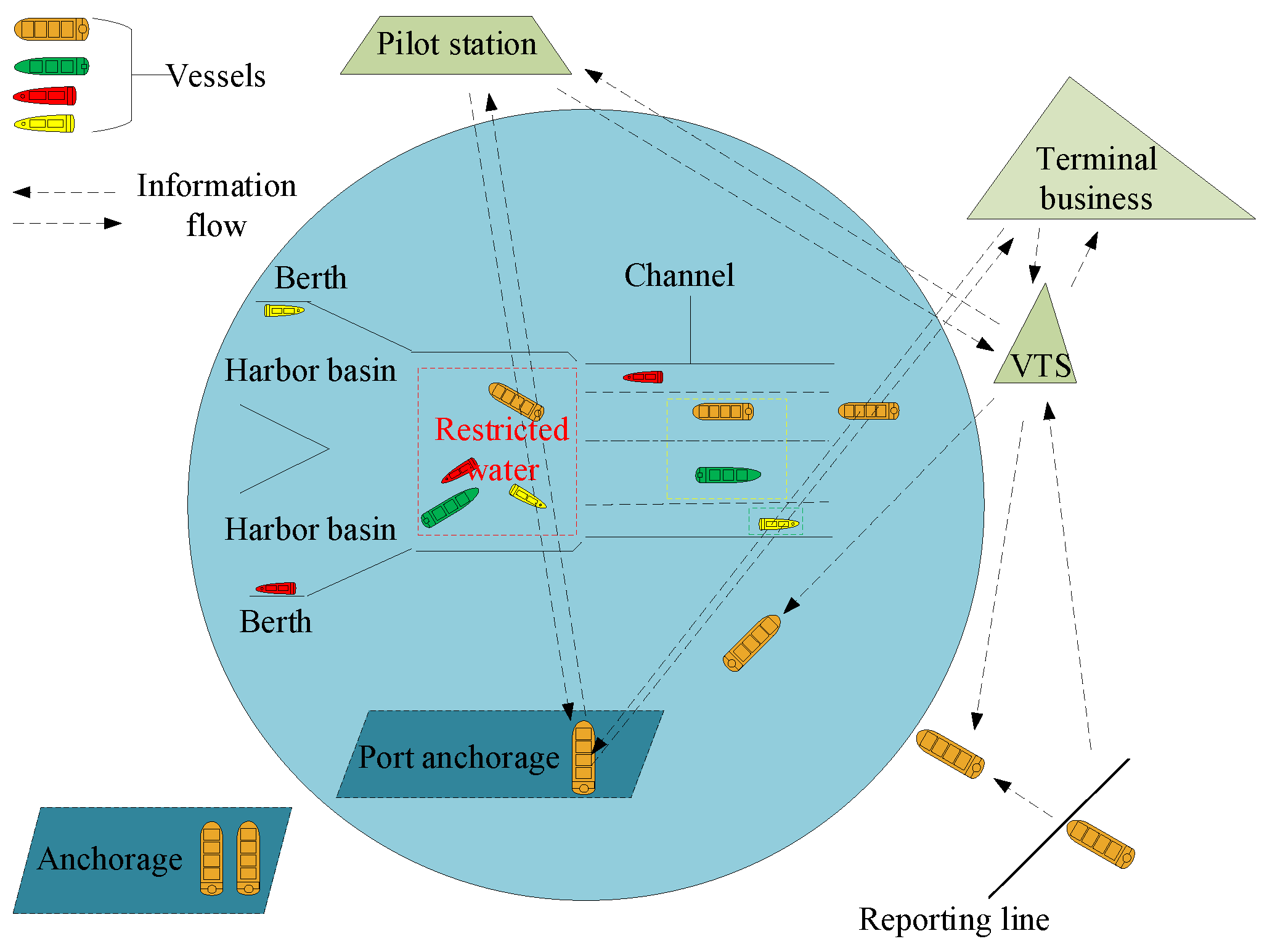
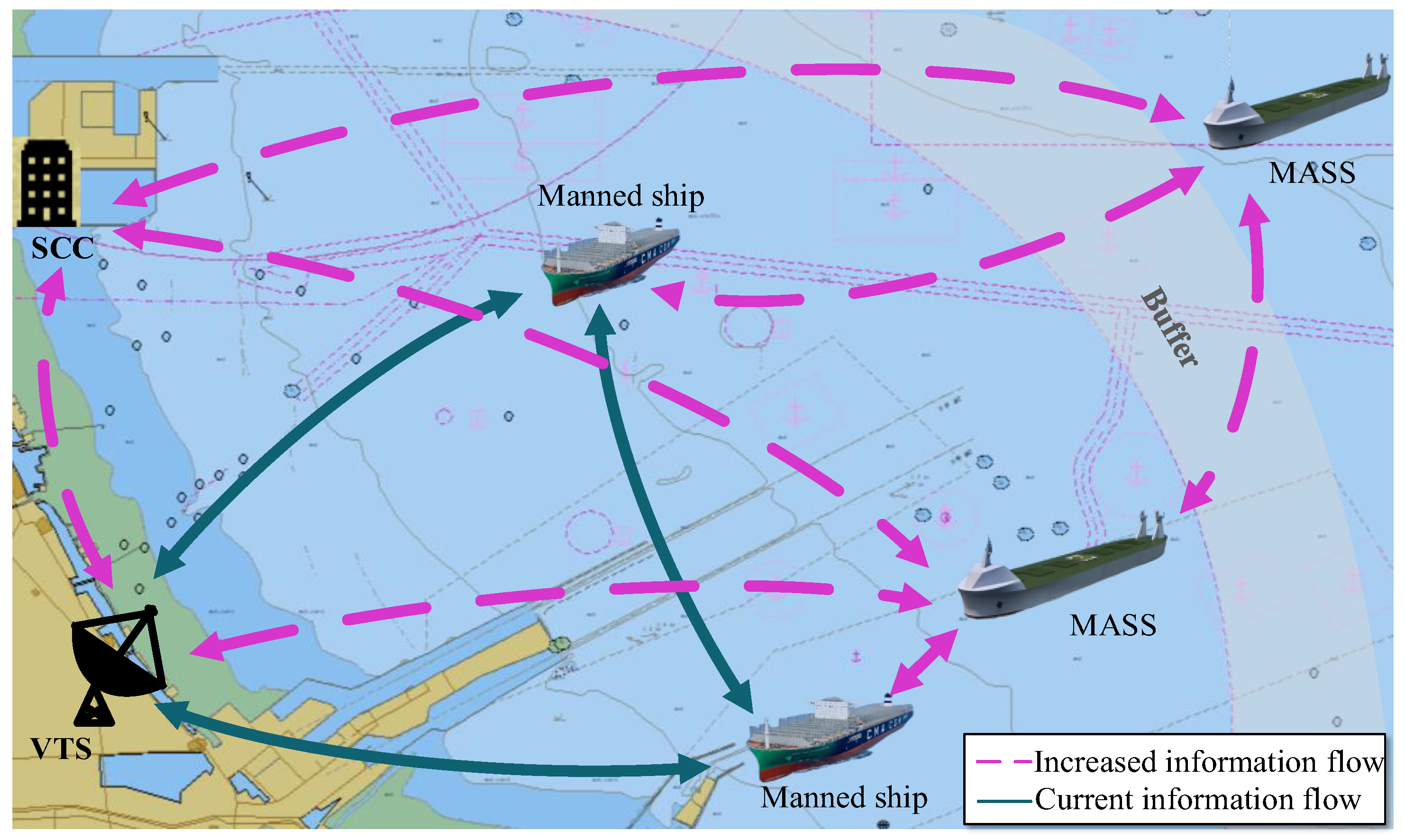
3.1. Analyze the Characteristics of MTOS
3.2. Determine the Information on MTOS
4. E-Navigation MTOS Construction
4.1. MTOS Function Description
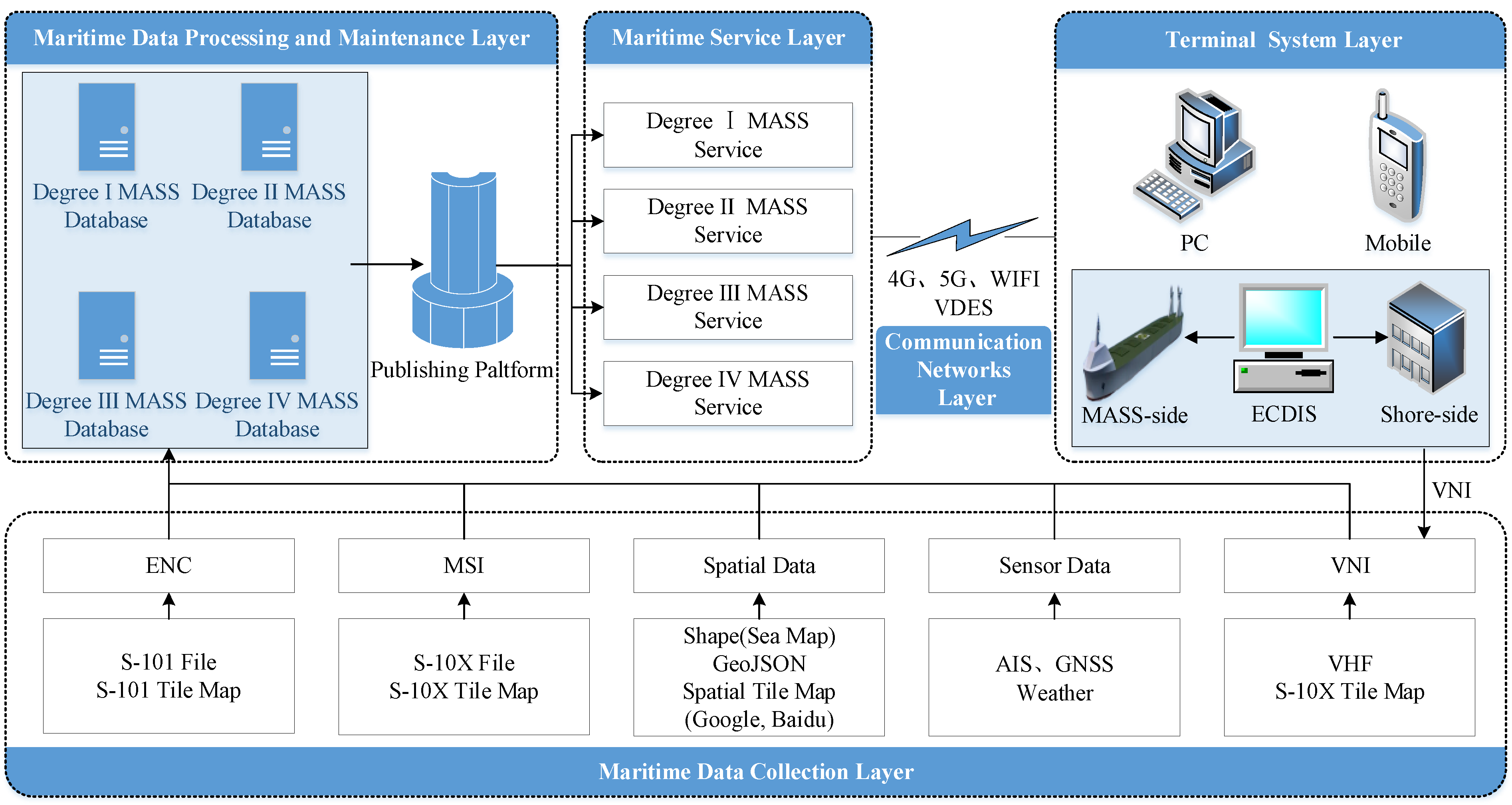
4.2. MTOS Operational Architecture
4.3. MTOS Specifications
4.3.1. Services Data Standard
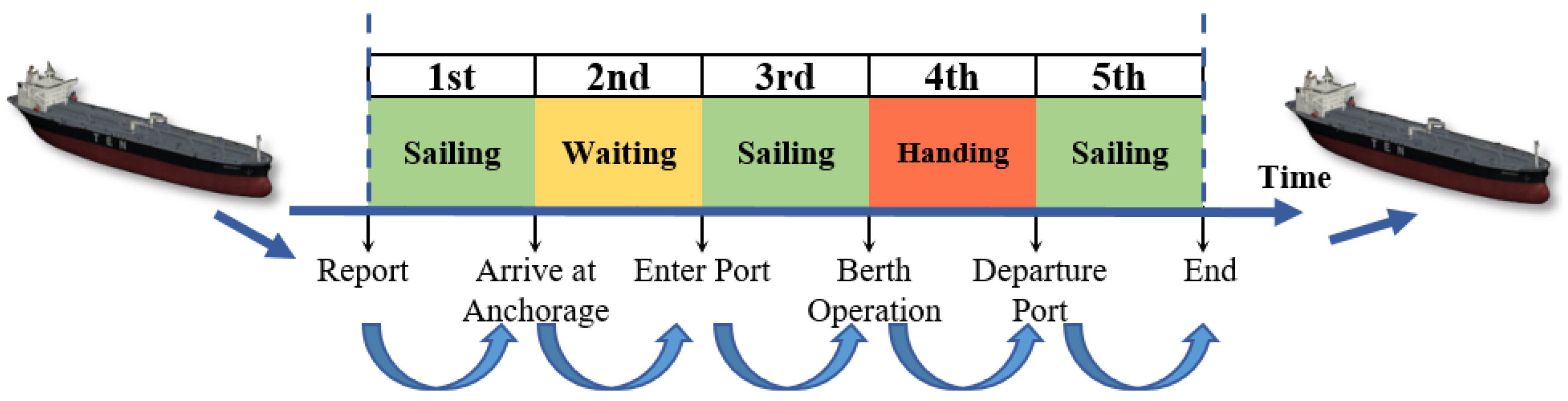
4.3.2. Service Publishing Method
- 4.
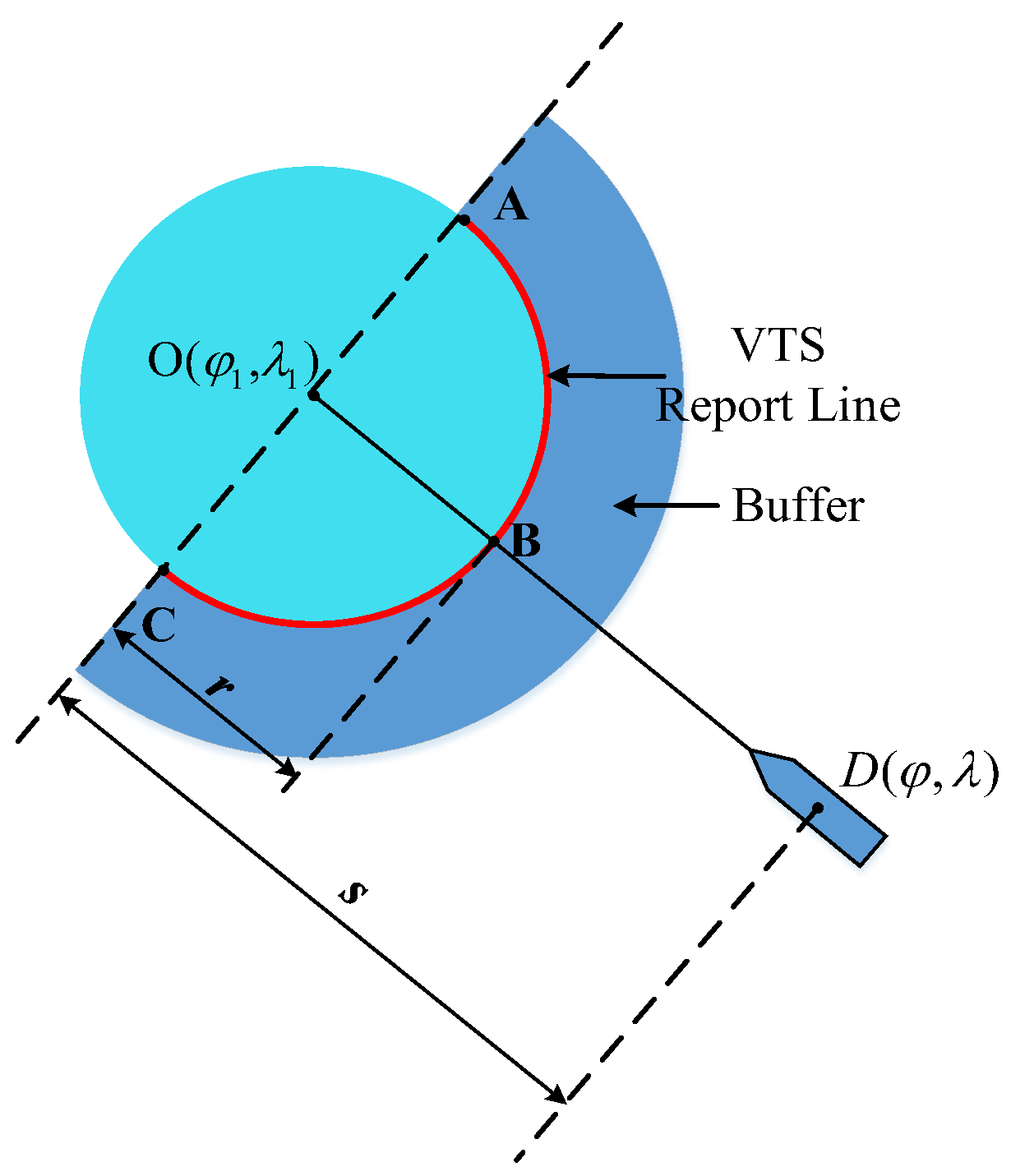
- Service automatic publishing algorithm of VTS report line area
- 5.
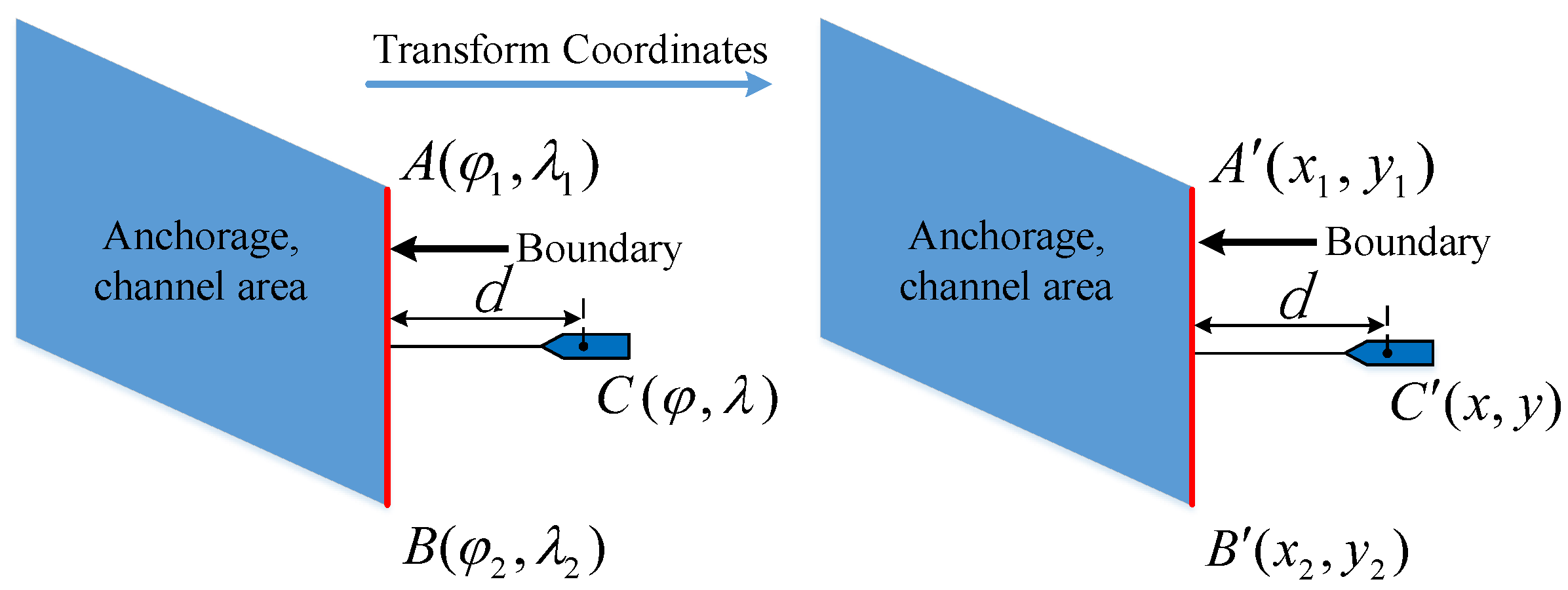
- Service automatic publishing algorithm of anchorage and channel areas
- 6.
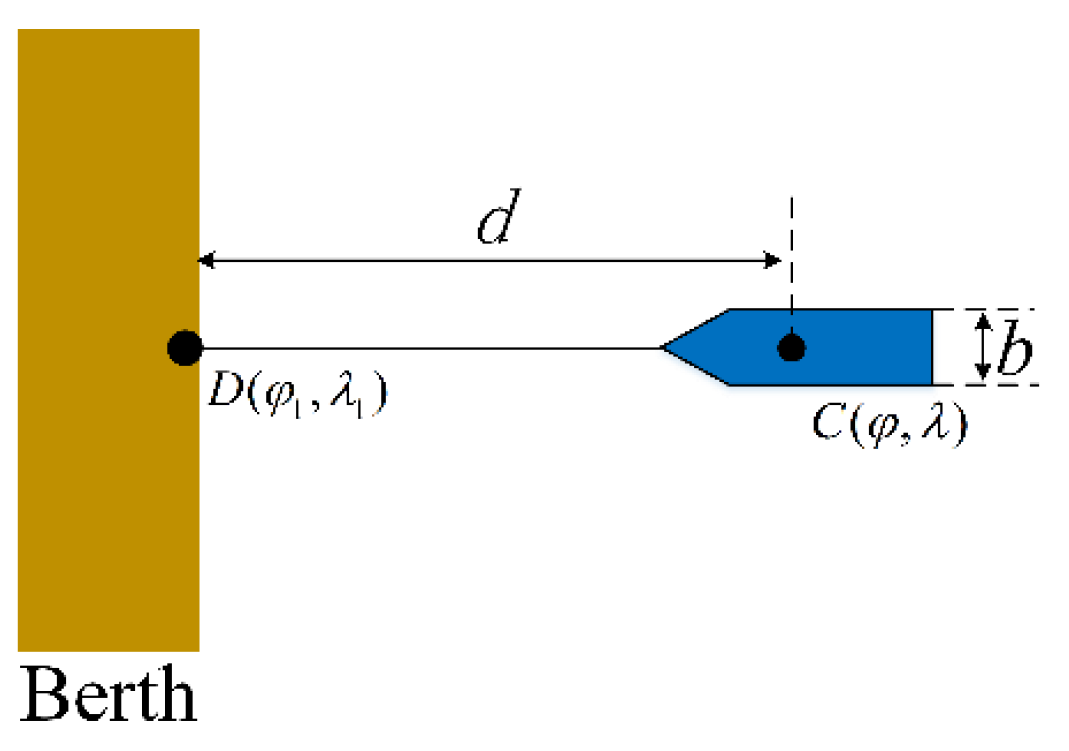
- Service automatic publishing algorithm of berth area
5. Experiments and Results
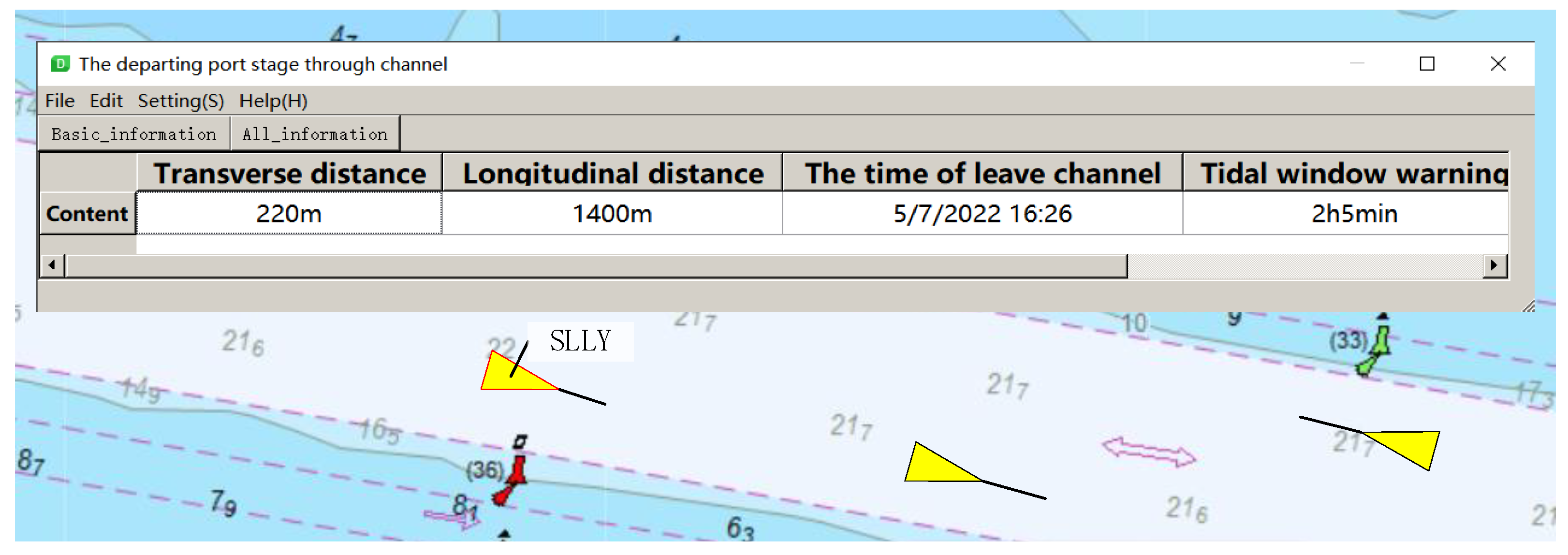
5.1. Verify the Performance of MTOS Publishing Service Information
5.2. Determine the Effect of MTOS on Port Traffic Safety
- Establish port traffic scenarios;
- Simulation of the scenarios with and without the MTOS; and
- Analysis and discussion of experimental results.
5.2.1. Create Simulation Scenarios
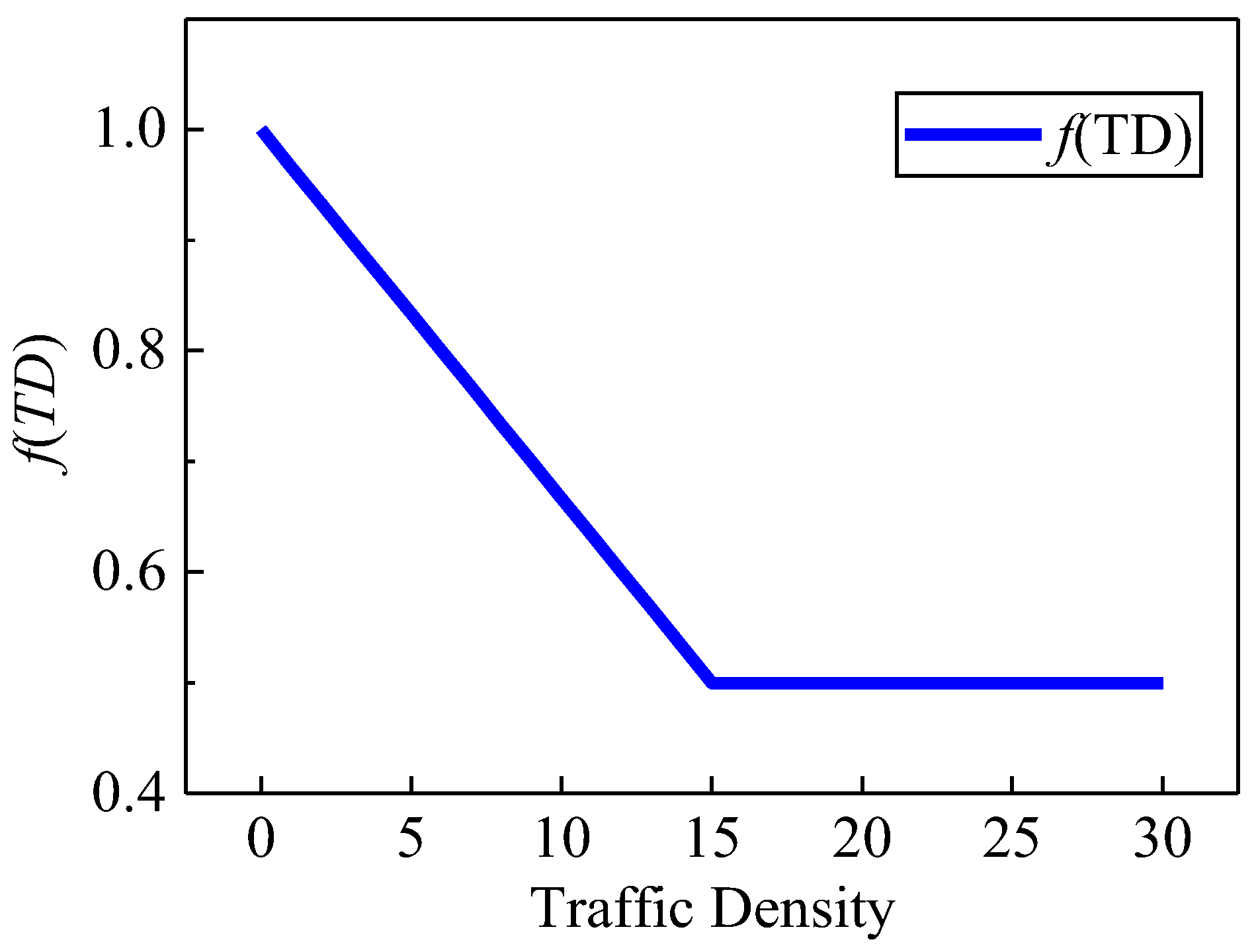
5.2.2. Method for Assessing Port Traffic Safety
5.2.3. Results of Simulation Experiments
- The safety index was calculated every 30 s for all vessels in each simulator run resulting in an average Safety Index for each run; and
- The number of minor incidents, major incidents, and accidents was counted.
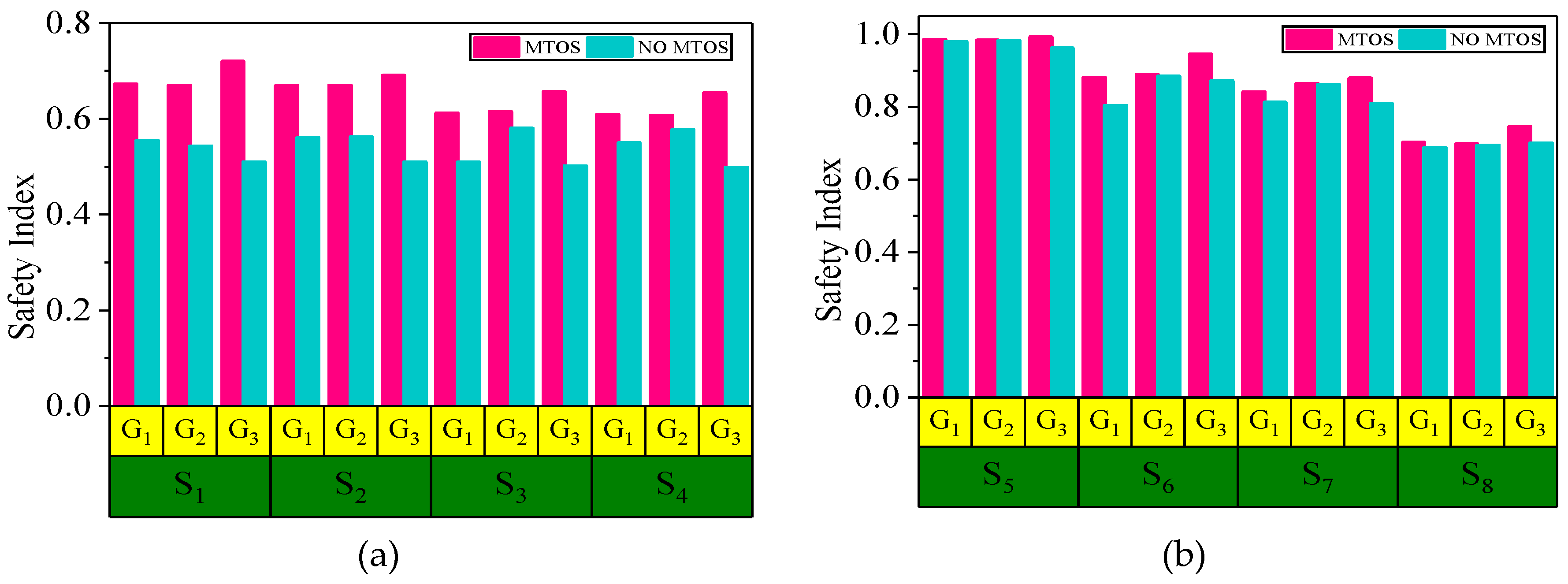
- 7.
- Average safety index with and without MTOS
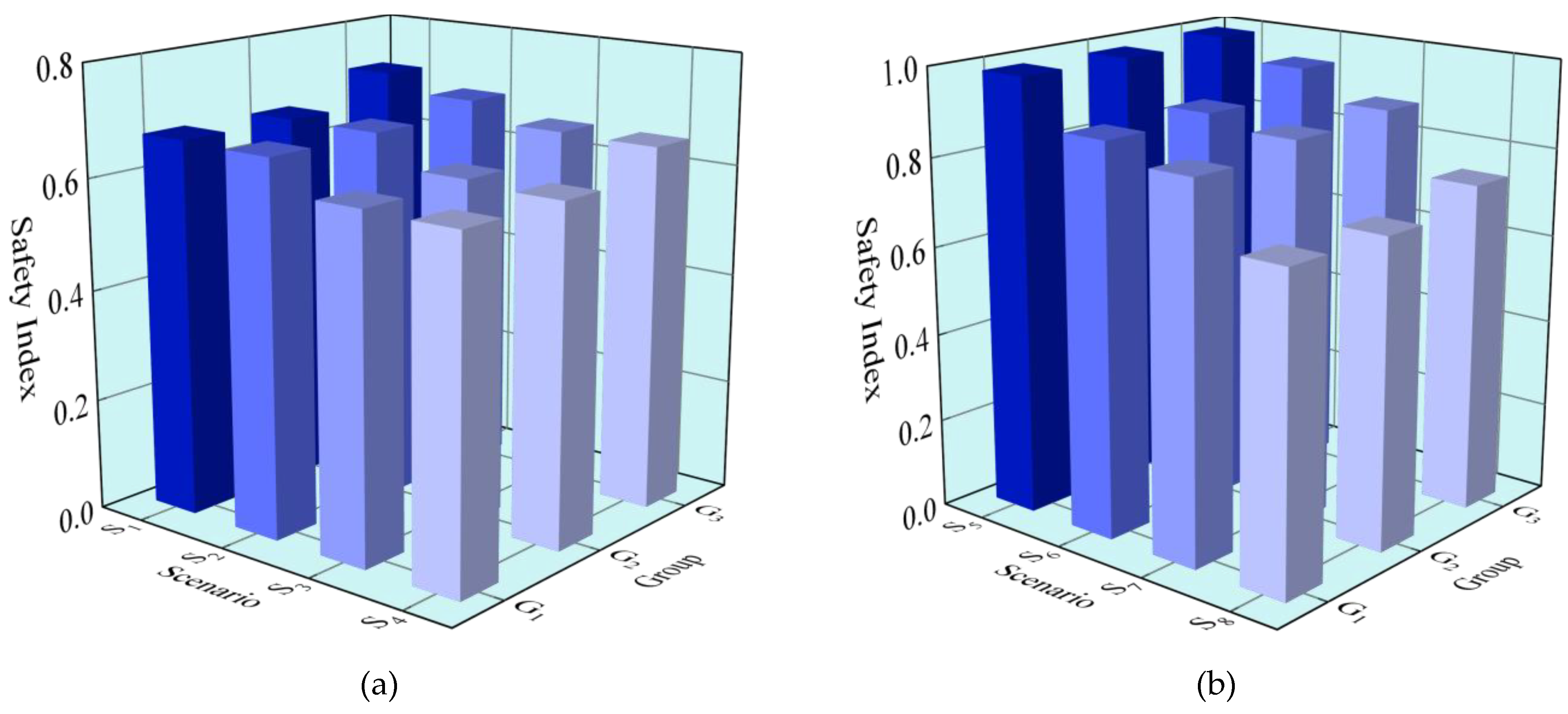
- 8.
- Average safety index of different groups with MTOS
- 9.
- Change in minor and major incidents
5.3. Analysis and Discussion
- The model using a safety index is based on two MASS traffic encounters in port areas. However, in the port area where there are dense ships, there may be a situation where multiple ships cross.
- Although many scenarios of simulation experiments have been carried out according to Tianjin and Huanghua Port, different numbers and degrees of MASS have been designed for comparison. However, MASS are still conceptual and have not been formally put into commercial operation. Therefore, the simulation experiment scenario designed in the manuscript can not fully represent the traffic situation of the port waters after MASS operation in the future.
- MTOS is a novel solution for all MASS. This work does not involve the coexistence of MASS and traditional manned vessels.
6. Conclusions and Further Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Role Name | Name | Description | Mult | Type | Remarks |
|---|---|---|---|---|---|
| Class | MTOS_FeatureCatalog | MTOS information | - | - | - |
| Attribute | Name | MASS traffic organization service (MTOS) | 1 | Character String | |
| Attribute | Scope | The specific demand of the TOSMTS | 1 | Character String | |
| Attribute | Field of application | Mixed transportation maritime service in the coastal VTS areas | 0..1 | Character String | |
| Attribute | Version number | 1.0 | 1 | Character String | |
| Attribute | Version date | August 2022 | 1 | Date | |
| Attribute | Producer | Maritime Intelligent Transportation Research Team, Dalian, China | 1 | Character String | |
| Role | Item | MTOS_FC_Information Type | 1..* | MTOS_FC_Item | Aggregation |
| Role | Definition Source | https://iho.int/uploads/user/pubs/standards/s-100/S-100_Edition_3.0.0.pdf (accessed on15 June 2021) | 0..* | FC_DefinitionSource | Aggregation |
| Role | classification | The classification of the Feature Catalogue. | 0..1 | FC_ClassificationCode | 1. unclassified |
| Role Name | Name | Description | Mult | Type | Remarks |
|---|---|---|---|---|---|
| Class | MTOS_FC_Information Type | - | - | - | Derived from S100_FC_ FeatureCatalogue |
| Attribute | Definition | Information needed to realize intelligence or depart the port of ships | 1 | String | - |
| Attribute | Code | Identifier = St1 | 1 | String | - |
| Attribute | Is Abstract? | No | 1 | Boolean | - |
| Attribute | Feature use type | Aggregate features | 1 | Composed of multiple feature types | - |
| Role | Anchorage information | Identifier = St1.1 | 1..* | Subtype | Name, capacity, anchorage position, the range of depth. |
| Role | Channel information | Identifier = St1.2 | 1..* | Subtype | Type, the position of start and end points, length, breadth, minimum depth, maximum navigable speed. |
| Role | Berth information | Identifier = St1.3 | 1..* | Subtype | Number, berth position, length, breadth, minimum depth, trend. |
| Role | Ship scheduling information | Identifier = St1.4 | 1..* | Subtype | The estimated time of arrival (ETA), the estimated time of departure (ETD), buffer scope, estimated anchor position, the time of drop anchor, the time of heaving anchor. |
| Role | Early warning information | Identifier = St1.5 | 1..* | Subtype | Navigation longitudinal and transverse spacing warning, overtaking warning, crossing warning. |
| Role | MASS degree information | Identifier = St1.6 | 1..* | Subtype | Degree of MASS from I to IV. |
| Role | Remote control information | Identifier = St1.7 | 1..* | Subtype | Main thruster command, side thruster command, steering gear control, and sound signal control. |
| Role | Remote pilotage information | Identifier = St1.8 | 1..* | Subtype | Start pilotage position, enter channel time, leave channel time, time to start berthing |
| Role | Monitori Auxiliary decision informationng information | Identifier = St1.9 | 1..* | Subtype | Onboard real-time video information, surrounding target information perceived by onboard radar and AIS, hydrological and meteorological information of navigation area. |
| Role | Ship status information | Identifier = St1.10 | 1..* | Subtype | Navigation status (heading, course, speed, draft), equipment status (engine room equipment, conduction equipment), MASS level. |
| Role | Communication protocol information | Identifier = St1.11 | 1..* | Subtype | Data format, communication encryption level, communication control (start, control, end), communication address. |
| Role | Bad weather information | Identifier = St1.12 | 1..* | Subtype | Channel opening and closing information, emergency anchor location, and marine weather condition. |
| Role | Ice information | Identifier = St1.13 | 1..* | Subtype | Thickness and scope of ice, ship’s route in ice area, location of the icebreaker. |
| Role | Restricted visibility information | Identifier = St1.14 | 1..* | Subtype | Recommended speed, light, sound, and shape, high-frequency broadcast of aids to navigation. |
| Role | Emergency information | Identifier = St1.15 | 1..* | Subtype | Accident type, emergency refuge location, accident impact scope, suggested route to avoid, search and rescue information. |
| Role | Auxiliary decision information | Identifier = St1.15 | 1..* | Subtype | TCPA, DCPA, recommend speed and course |
References
- Internation Maritime Organization. Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (MASS); Maritime Safety Committee 100/5: London, UK, 2018.
- MUNIN. Research in Maritime Autonomous Systems Projects Results and Technology Potentials. Available online: http://www.unmannedship.org/munin/wp-content/uploads/2016/02/MUNIN-final-brochure.pdf (accessed on 10 May 2022).
- Jia, C.C. Impact of Maritime Autonomous Surface Ships (MASS) on VTS Operations. Master’s Thesis, World Maritime University, Malmo, Sweden, 2018. [Google Scholar]
- Yunus, E.S.; Veysel, G.; Alper, S. Swot-ahp analysis of autonomous shipping. In Proceedings of the 4th International Multidisciplinary Congress of Eurasian, Rome, Italy, 18 August 2017. [Google Scholar]
- Park, Y.S. A study on the improvement of VTS system by the Introduction of maritime autonomous surface ship (MASS). Korean Assoc. Marit. Police Sci. 2020, 10, 19–50. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Li, J.J.; Zhu, S.F.; Wang, C.B. Vessel intelligent transportation maritime service portfolios in port areas under e-navigation framework. J. Mar. Sci. Tech.-Japan 2020, 25, 1296–1307. [Google Scholar] [CrossRef]
- Zhu, S.F.; Zhang, X.Y.; Xu, C.B.; Zhang, H.H. Overview of research on maritime service set of ship transportation. China Water Transp. 2016, 16, 65–67+70. [Google Scholar]
- Internation Maritime Organization. Initial Descriptions of Maritime Services in the Context of E-Navigation. Available online: https://www.imo.org/en/OurWork/Safety/Pages/eNavigation.aspx (accessed on 7 September 2022).
- Baldauf, M.; Kitada, M.; Mehdi, R.; Dalaklis, D. E-navigation, digitalization, and unmanned ships: Challenges for future maritime education and training. In Proceedings of the 12th International Technology, Education and Development Conference, Valencia, Spain, 16 March 2018. [Google Scholar]
- Baldauf, M.; Fischer, S.; Kitada, M.; Mehdi, R.A.; Al-Quhali, M.A.; Fiorini, M. Merging Conventionally Navigating Ships and MASS-Merging VTS, FOC and SCC? TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 495–501. [Google Scholar] [CrossRef]
- International Chamber Shipping. ICS-Annual-Report-2020. Available online: https://www.ics-shipping.org/wp-content/uploads/2020/11/ICS-Annual-Report-2020-Chinese-version.pdf (accessed on 13 October 2022).
- Zheng, G.; Xing, Y.; Wang, Y. A brief analysis of maritime support requirements for maritime surface autonomous ships (MASS). Marit. Technol. 2021, 2, 72–75. [Google Scholar]
- Relling, T.; Margareta, L.; Ostnes, R.; Petter, H.H. The contribution of Vessel Traffic Services to safe coexistence between automated and conventional vessels. Marit. Policy Manag. 2022, 49, 990–1009. [Google Scholar] [CrossRef]
- Relling, T.; Praetorius, G.; Odd, S.H. A socio-technical perspective on the future Vessel Traffic Services. Necesse 2019, 4, 112–129. [Google Scholar]
- Kim, T.; Perera, L.P.; Sollid, M.P.; Batalden, B.M.; Sydnes, A.K. Safety challenges related to autonomous ships in mixed navigational environments. WMU J. Marit. Aff. 2022, 21, 141–159. [Google Scholar] [CrossRef]
- Fan, C.L.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.P.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean. Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Abdelmoula, A.A.; Khalifa, M.; Mohamed, Y.; Mohammed, Q. Toward a new maritime communication system in Detroit of Gibraltar where conventional and autonomous ships will co-exist. In Proceedings of the 2017 International Conference on Wireless Networks and Mobile Communications (WINCOM), Rabat, Morocco, 1 November 2017. [Google Scholar]
- Wróbel, K.; Gil, M.; Montewka, J. Identifying research directions of a remotely-controlled merchant ship by revisiting her system-theoretic safety control structure. Saf. Sci. 2020, 129, 104797. [Google Scholar] [CrossRef]
- Bogusławski, K.; Nasur, J.; Li, J.; Gil, M.; Wróbel, K.; Goerlandt, F. A Cross-Domain Scientometric Analysis of Situational Awareness of Autonomous Vehicles With Focus on the Maritime Domain. IEEE Access 2022, 10, 50047–50061. [Google Scholar] [CrossRef]
- Bogusławski, K.; Gil, M.; Nasur, J.; Wróbel, K. Implications of autonomous shipping for maritime education and training: The cadet’s perspective. Marit. Econ. Logist. 2022, 24, 327–343. [Google Scholar] [CrossRef]
- Hong, T. Building a Fusion Information System for Safe Navigation. Int. J. Fuzzy Log. Intell. Syst. 2014, 14, 105–112. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.C.; Peng, G.J.; Zhou, X.L. Carry out e-navigation research-promote the innovation of maritime management services in China. Port Econ. 2014, 14, 43–45. [Google Scholar]
- Shin, I.; Hwang, H.; Lee, J. A Development of Simulation System based on Scenario for Evaluation of e-Navigation MSP. J. Korean Soc. Mar. Eng. 2015, 39, 86–93. [Google Scholar] [CrossRef]
- Cui, H.S.; Wu, L.L. Application of IHO S-100 in E-Navigation. Hydrogr. Aphic Surv. Charting 2015, 35, 55–57. [Google Scholar]
- EfficienSea–Efficient. Safe and Sustainable Traffic at Sea. 2009. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/efficiensea/ (accessed on 16 July 2021).
- MONALISA. Motorways and Electronic Navigation by Intelligence at Sea. Available online: http://www.sjofartsverket.se/monalisa (accessed on 28 September 2021).
- MONALISA 2.0. Motorways and Electronic Navigation by Intelligence at Sea 2.0. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/monalisa-2-0/ (accessed on 25 June 2020).
- ACCSEAS-Accessibility for Shipping, Efficiency Advantages and Sustainability. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/accseas/ (accessed on 25 July 2020).
- SSAP-Smart Ship Application Platform. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/ssap-smart-ship-application/ (accessed on 9 August 2020).
- Sea Traffic Management. Validation. Available online: https://www.seatrafficmanagement.info/ (accessed on 18 August 2020).
- E-Yangshan Port. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/yangshan-port-e-navigation/ (accessed on 19 September 2020).
- IALA. Guideline 1167, VTS Management, Edition 1.0. Available online: https://www.iala-aism.org/product/g1167-ed1-0-vts-management/ (accessed on 5 June 2019).
- Zhang, X.Y.; Li, Y.J.; Zhang, J.; Wang, Z.Q. Optimization of port vessel traffic organization under various channel conditions. In Proceedings of the 13th of the Annual Conference of ITS, Tianjin, China, 17 May 2018. [Google Scholar]
- IALA. Vessel Traffic Services (VTS) Manual, Edition 80. Available online: https://www.iala-aism.org/product/iala-vts-manual-2021/ (accessed on 25 August 2020).
- International Business Machines. ICC-IMB Piracy and Armed Robbery Against Ships, January–March 2018. Available online: https://www.icc-ccs.org/reports/2018-Q2-IMB-Piracy-Report.pdf (accessed on 19 May 2020).
- Wróbel, K.; Montewkab, J.; Kujalac, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Safe. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Futurenautic. Autonomous Ships 2016 Roundtable White Paper. Available online: https://www.futurenautics.com/product/autonomous-ships-2016-roundtable-white-paper/ (accessed on 9 August 2021).
- Luo, J.N.; Wan, X.X.; Duan, J. A new model of environment-aware Geographic Information services in e-Navigation. J. Navig. 2020, 73, 471–484. [Google Scholar] [CrossRef]
- Internation Maritime Organization. Guidance on the Definition and Harmonization of the Format and Structure of Maritime Services in the Context of E-Navigation. Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/MSCResolutions/MSC.467(101) (accessed on 25 March 2020).
- Zhu, S.F. Preliminary Research on Port Vessel Transport Maritime Service Portfolio under the E-Navigation. Master’s Thesis, Dalian Maritime University, Dalian, China, 2017. [Google Scholar]
- Karizi, M.; Liontaki, M. Development of a Maritime Collision Safety Index Method. Master’s Thesis, Chalmers University of Technology, Goteborg, Sweden, 2018. [Google Scholar]
- European Maritime Simulator Network. Numerical Data Analysis Safety Index. Available online: https://bibliotekanauki.pl/articles/117071.pdf (accessed on 5 June 2022).
















| Vessel Type | Degree | Information Type | Specific Information Content |
|---|---|---|---|
| MASS | I | Anchorage | Name, capacity, anchorage position, the range of depth |
| Channel | Type, the position of start and end points, length, breadth, minimum depth, maximum navigable speed | ||
| Berth | Number, berth position, length, breadth, minimum depth, trend | ||
| Early warning | Navigation longitudinal and transverse spacing warning, overtaking warning, crossing warning | ||
| Ship scheduling | The estimated time of arrival (ETA), the estimated time of departure (ETD), the tidal window | ||
| Boisterous weather | Channel opening and closing information, emergency anchor location, and marine weather condition | ||
| Ice information | Thickness and scope of ice, ship’s route in an ice area, location of the icebreaker | ||
| Restricted visibility | Recommended speed, light, sound, and shape | ||
| Emergency | Accident type, emergency refuge position, accident impact scope, suggested route to avoid, and search and rescue information | ||
| The type information of MASS | Degree information of MASS (I–IV) | ||
| II | The degree I MASS | All service information for degree I MASS is provided. | |
| Remote control | Main thruster command, side thruster command, steering gear control command, sound signal control command. | ||
| Communication protocol | Data format, communication encryption degree, communication control (start, control, end), communication address. | ||
| III | The degree II MASS | All service information for degree II MASS is provided. | |
| Ship scheduling | ETA, ETD, tidal window, buffer scope, estimated anchor position, the time of drop anchor, and the time of heaving anchor. | ||
| Remote pilotage | Start pilotage position, enter channel time, leave channel time, and time to start berthing. | ||
| Monitoring | Onboard real-time video information, surrounding target information perceived by onboard radar and AIS, hydrological and meteorological information of navigation area. | ||
| Ship status | Navigation status (heading, course, speed, draft), equipment status (engine room equipment, conduction equipment). | ||
| Restricted visibility | Recommended speed, light, and sound signals. | ||
| IV | The degree III MASS | All service information for the degree III MASS is provided. | |
| Auxiliary decision | Time of Closest Point of Approach (TCPA), Distance of Closest Point of Approach (DCPA), recommended speed, and course. | ||
| Restricted visibility | Recommended speed, light and sound signals, high-frequency broadcast of aids to navigation information. |
| Scenarios Number | Parameters | ||
|---|---|---|---|
| Port | Visibility (Nautical Miles) | Wave Height (Meters) | |
| S1 | Tianjin | ||
| S2 | Tianjin | ||
| S3 | Tianjin | ||
| S4 | Tianjin | ||
| S5 | Huanghua | ||
| S6 | Huanghua | ||
| S7 | Huanghua | ||
| S8 | Huanghua | ||
| Group | Degree and Quantity of MASS | |||
|---|---|---|---|---|
| I | II | III | IV | |
| G1 | 10 | 10 | 10 | 10 |
| G2 | 15 | 15 | 5 | 5 |
| G3 | 5 | 5 | 15 | 15 |
| Type of Scenarios | Group | MTOS | Average Safety Index | Number of Minor Incidents | Number of Major Incidents | Accident |
|---|---|---|---|---|---|---|
| S1 | G1 | Run | 0.672 | 0 | 0 | 0 |
| No run | 0.554 | 0 | 0 | 0 | ||
| G2 | Run | 0.670 | 1 | 0 | 0 | |
| No run | 0.543 | 1 | 0 | 0 | ||
| G3 | Run | 0.720 | 1 | 1 | 0 | |
| No run | 0.510 | 2 | 1 | 0 | ||
| S2 | G1 | Run | 0.669 | 1 | 1 | 0 |
| No run | 0.561 | 1 | 2 | 0 | ||
| G2 | Run | 0.670 | 1 | 0 | 0 | |
| No run | 0.562 | 2 | 1 | 0 | ||
| G3 | Run | 0.690 | 0 | 0 | 0 | |
| No run | 0.510 | 1 | 1 | 0 | ||
| S3 | G1 | Run | 0.612 | 2 | 2 | 0 |
| No run | 0.510 | 2 | 0 | 0 | ||
| G2 | Run | 0.615 | 1 | 1 | 0 | |
| No run | 0.580 | 2 | 1 | 0 | ||
| G3 | Run | 0.656 | 1 | 0 | 0 | |
| No run | 0.501 | 1 | 1 | 0 | ||
| S4 | G1 | Run | 0.609 | 3 | 2 | 0 |
| No run | 0.550 | 4 | 2 | 0 | ||
| G2 | Run | 0.607 | 3 | 1 | 0 | |
| No run | 0.577 | 3 | 1 | 0 | ||
| G3 | Run | 0.654 | 2 | 1 | 0 | |
| No run | 0.498 | 3 | 2 | 0 |
| Type of Scenarios | Group | MTOS | Average Safety Index | Number of Minor Incidents | Number of Major Incidents | Accident |
|---|---|---|---|---|---|---|
| S5 | G1 | Run | 0.985 | 0 | 0 | 0 |
| No run | 0.979 | 0 | 0 | 0 | ||
| G2 | Run | 0.983 | 0 | 0 | 0 | |
| No run | 0.982 | 1 | 0 | 0 | ||
| G3 | Run | 0.992 | 1 | 0 | 0 | |
| No run | 0.962 | 2 | 1 | 0 | ||
| S6 | G1 | Run | 0.881 | 1 | 0 | 0 |
| No run | 0.803 | 1 | 2 | 0 | ||
| G2 | Run | 0.889 | 0 | 0 | 0 | |
| No run | 0.884 | 1 | 1 | 0 | ||
| G3 | Run | 0.945 | 0 | 0 | 0 | |
| No run | 0.872 | 2 | 1 | 0 | ||
| S7 | G1 | Run | 0.841 | 2 | 2 | 0 |
| No run | 0.812 | 2 | 2 | 0 | ||
| G2 | Run | 0.864 | 1 | 1 | 0 | |
| No run | 0.861 | 2 | 1 | 0 | ||
| G3 | Run | 0.879 | 1 | 0 | 0 | |
| No run | 0.809 | 3 | 1 | 0 | ||
| S8 | G1 | Run | 0.702 | 1 | 1 | 0 |
| No run | 0.687 | 2 | 1 | 0 | ||
| G2 | Run | 0.698 | 1 | 1 | 0 | |
| No run | 0.694 | 1 | 1 | 0 | ||
| G3 | Run | 0.745 | 1 | 1 | 0 | |
| No run | 0.7 | 3 | 2 | 0 |
| Port | Incident | MTOS | Number | Decrease |
|---|---|---|---|---|
| Tianjin Port | Minor | Run | 16 | 27.28% |
| No run | 22 | |||
| Major | Run | 9 | 25.00% | |
| No run | 12 | |||
| Huanghua Port | Minor | Run | 9 | 18.19% |
| No run | 11 | |||
| Major | Run | 6 | 14.29% | |
| No run | 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, W.; Zhang, X.; Wang, J.; Feng, H.; Tengecha, N.A. Traffic Organization Service for Maritime Autonomous Surface Ships (MASS) with Different Degrees of Autonomy. J. Mar. Sci. Eng. 2022, 10, 1889. https://doi.org/10.3390/jmse10121889
Guo W, Zhang X, Wang J, Feng H, Tengecha NA. Traffic Organization Service for Maritime Autonomous Surface Ships (MASS) with Different Degrees of Autonomy. Journal of Marine Science and Engineering. 2022; 10(12):1889. https://doi.org/10.3390/jmse10121889
Chicago/Turabian StyleGuo, Wenqiang, Xinyu Zhang, Jingyun Wang, Hongxiang Feng, and Nyamatari Anselem Tengecha. 2022. "Traffic Organization Service for Maritime Autonomous Surface Ships (MASS) with Different Degrees of Autonomy" Journal of Marine Science and Engineering 10, no. 12: 1889. https://doi.org/10.3390/jmse10121889
APA StyleGuo, W., Zhang, X., Wang, J., Feng, H., & Tengecha, N. A. (2022). Traffic Organization Service for Maritime Autonomous Surface Ships (MASS) with Different Degrees of Autonomy. Journal of Marine Science and Engineering, 10(12), 1889. https://doi.org/10.3390/jmse10121889