1. Introduction
Shipping is the most efficient, cost-effective and environmentally friendly method for the transportation of mass cargo from producing to consuming countries all over the world. In 2020, the international seaborne trade reached 10.7 billion tons in total volume, equal to over 80% of the volume of international trade in goods [
1]. Due to the huge amount of transportation work involved, emissions from international shipping have a considerable share of the global anthropogenic GHG emissions. According to the Fourth International Maritime Organization (IMO) GHG Study 2020, the share of shipping emissions in global anthropogenic emissions has increased from 2.76% in 2012 to 2.89% in 2018, or from 977 million tons to 1076 million tons [
2]. The IMO has developed a series of measures designed to control emissions from the shipping sector, as urgent action to combat climate change and its impacts, supporting the United Nations’ Sustainable Development Goals (SDGs). In 2011, IMO became the first international body to adopt mandatory energy efficiency measures for the entire maritime industry sector with a suite of technical and operational requirements, namely, the Energy Efficiency Design Index (EEDI) and the Ship Energy Efficiency Management Plan (SEEMP) [
3]. In 2018, IMO adopted an initial strategy for the reduction of GHG emissions from ships. It envisages that GHG emissions per transport work should be reduced by at least 40% by 2030, targeting 70% by 2050, compared to 2008 and that total annual GHG emissions from international shipping should be reduced by at least 50% by 2050 compared to 2008. To help move further the implementation of the initial GHG strategy, the 76th session of the IMO’s Marine Environment Protection Committee (MEPC 76) adopted technical and operational measures to reduce the carbon intensity of international shipping, taking effect from 2023. The measures include the Energy Efficiency Existing Ship Index (EEXI), the enhanced SEEMP and the Carbon Intensity Indicator (CII) rating scheme [
4]. Within the mandatory CII rating scheme, all cargo and cruise ships above 5000 GT are given a rating of A to E based on their environmental performance every year. Every ship will be required to meet the CII target rating C or better within a certain time frame. Rating thresholds will gradually become more stringent and in line with the 40% reduction in GHG (compared to 2008) target by 2030. To achieve a satisfactory CII rating annually, as well as improving a ship’s technical efficiency, it is important to maintain a good general condition of the vessel throughout her in-service period.
As recognized by the IMO [
5], ship hull and propeller fouling is an important factor to consider when discussing the performance of a ship in operation. All ships have some degree of fouling, which may lead to significant increases in resistance and power requirement and, in turn, has a severe impact both on fuel costs and on gas emissions. Schultz [
6] reported that heavy calcareous growth can result in a 59–86% change in powering. Song et al. [
7] showed that barnacle fouling can cause an increase up to 93% in a ship’s frictional resistance. A biofouling-induced increase in ship resistance will ultimately lead to an increase in fuel consumption and GHG emissions. Therefore, hull maintenance and fouling management is very necessary in enhancing energy efficiency and reducing air emissions from ships.
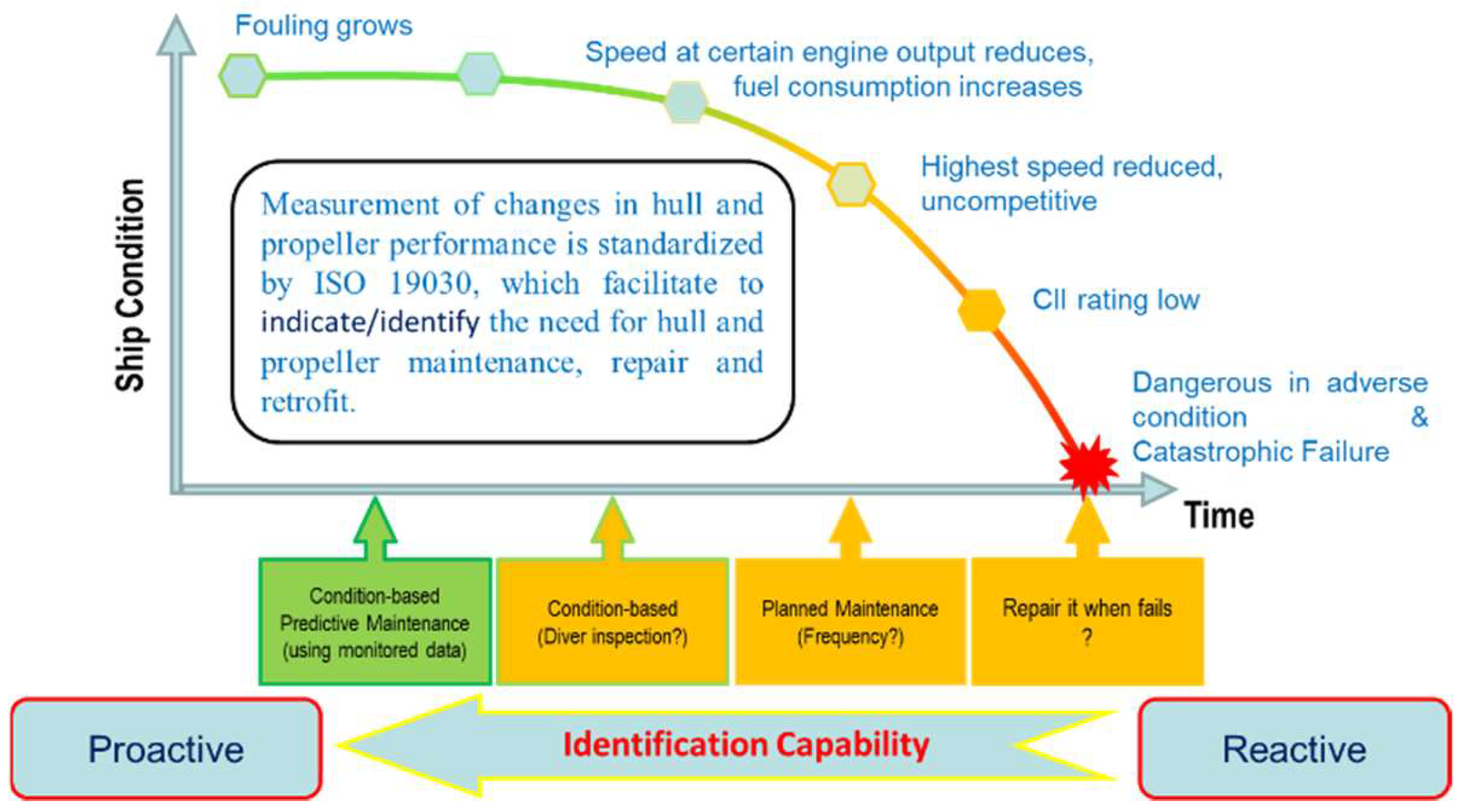
From a technical point of view, the fouling development on a ship is a type of deterioration of equipment over time. Deterioration of any equipment begins as soon as the equipment is commissioned. If no action is taken, the health condition of the equipment will become worse with time and various phenomena, such as increased noise, vibrations, temperature rise, mechanical damages and, finally, catastrophic failure, as applicable, are observed. Similarly, studies have shown that the fouling process begins within the first few hours of a ship’s immersion in water [
8]. Over time, as the fouling grows, the ship’s speed at a certain engine rating reduces, followed by fuel consumption increases and ends up with the failure to achieve the design speeds and a poor CII rating, thus, the ship will be commercially uncompetitive. In addition to these economy-oriented considerations, a ship may also become unsafe when navigating in adverse conditions [
9], which may lead to even more catastrophic failures, such as grounding and collision accidents.
Over the years, different types of counter measures or maintenance schemes have been developed to cope with the equipment health condition in general and to ensure the smooth operation of a mechanical system [
10,
11], i.e.,
reactive maintenance by replacing/repairing failed components;
planned preventive time-based maintenance;
condition-based maintenance based on regular inspection;
condition-based predictive maintenance based on continuous monitoring.
As shown in
Figure 1, these maintenance schemes are also observed in the fouling management of ships, except that the reactive maintenance, practically, does not fit the ship fouling scenario.
The SOLAS requirements [
12] dictate that all merchant vessels must complete an inspection of the hull in a dry-docking twice within a five-year period, and the intermediate survey must not be more than 36 months. This is normally planned well before the intended date because it needs a considerable time of preparation to best fit to the ship’s voyage plans. During dry-docking, the ship’s hull surfaces are immersed in water, thus, the hull and propeller are cleaned and re-painted after various levels of surface preparation mainly based on the in-dock hull condition. However, this is just a minimum maintenance scheme that only partly complies with the concept of fouling management. The sole reliance on the dry-docking activities may result in a significant increase in fuel consumption and GHS emissions if the condition of the ship’s hull and propeller degrade poorly in the middle of the dry-docking interval, which could be caused by numerous factors including, but not limited to, operational profile, environmental conditions, fouling control schemes applied, etc. Often, the propellers are running in a relatively heavy condition, thus, a significant amount of fuel is burnt unnecessarily and the hydrodynamic as well as the emission performances of the ship deteriorate. In view of this, some progressive companies conduct the dry-dockings more often to maintain an excellent fleet performance. For these planned preventive time-based maintenance schemes, the question is always “when is the right time?” for the dry-docking because maintenance that is either too early or too late has a significant negative impact on the performance of the transportation system due to increased downtime, maintenance cost, etc. For hull and propeller surface treatment, “too much too early” is particularly negative as it will induce unnecessary damage and hinder their hydrodynamic performance. The “condition-based maintenance based on regular inspection” means that a diver inspects the ship’s condition. This requires a logistics arrangement and the results are heavily dependent on the diver’s experience and report, which gives only a qualitative impression [
13].
How to correlate a ship’s surface fouling condition with the fuel and emission performance of a ship remains a demanding research subject [
6,
14]. Nowadays, with the fast adoption of digitalization by the maritime industry (Industry 4.0), the “condition-based predictive maintenance based on continuous monitoring” is attracting more and more attention. As a matter of fact, ISO has developed a standard (ISO 19030) on measuring the changes in hull and propeller performance [
15]. This enables the operators to better detect the need for hull and propeller maintenance, repair and retrofit.
Examining the different maintenance schemes, it is understood that the optimal pathway is the minimum amount of work necessary to ensure the ship provides the optimal level of speed, fuel and emission performance to ensure it is competitive on the market. Thus, the ship owner and/or operator must figure out the optimal maintenance frequency. To enable such a proactive intervention scheme, the capability of identifying timely and respectfully the ship’s condition is the key. There are alternative approaches to proactive intervention. Due to the constraint of limited available data of ship design information (intellectual property issue), statistical approaches were developed to estimate missing data [
16,
17,
18]. On the other hand, rational models were also developed for use when more design data are available [
19,
20,
21,
22]. This paper presents a methodology for evaluating the actual propulsive performance of a ship through continuous onboard measurement and metocean weather data, which is the most important part in developing the identification capability that is needed in a proactive maintenance procedure. This study explores ways to reduce the dependence of the methodology on detailed ship information. A case study will be presented to demonstrate the proposed methodology, which is intended to support the development of a predictive condition-based maintenance of ships.
2. Methodology
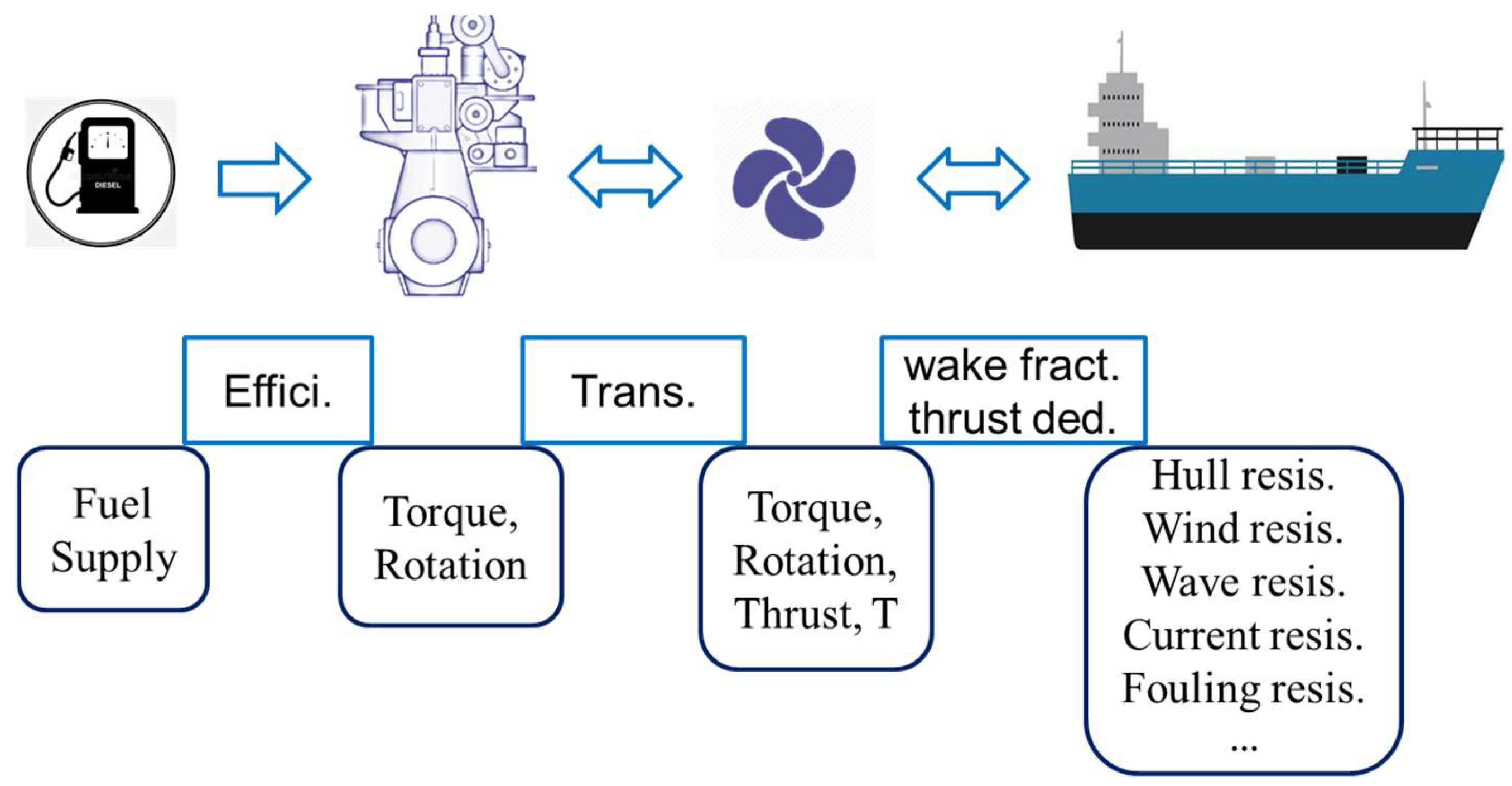
For a ship to advance in water at a speed V
S, her engine needs an amount of fuel to generate the necessary shaft power to drive a propeller to produce the thrust force T to overcome the experienced resistance R
Total.
Figure 2 shows the basic propulsion and energy transmission chain of the process on a ship. The total resistance R
Total acting on the ship at sea consists of the resistance in calm water R
T, the mean added resistance due to the relative wind
, the mean added resistance due to waves
, the resistance due to fouling
, the resistance due to rudder action
, the hull drifting forces in the steady condition R
drft, the added resistance due to yaw motion
, etc. The experienced resistance is overcome by the engine’s work and the use of a propulsor; thus, all the disturbances from either the encountered environmental conditions or the ship’s navigation are correlated to the performance of the engine, which is being monitored onboard. For the ship operator and charterers, it is of prime interest to know the performance of the ship at an ideal condition, that is, when the ship is doing a steady rectilinear motion in calm water, and use it as a yardstick for the effect of the operational (service) and environmental conditions.
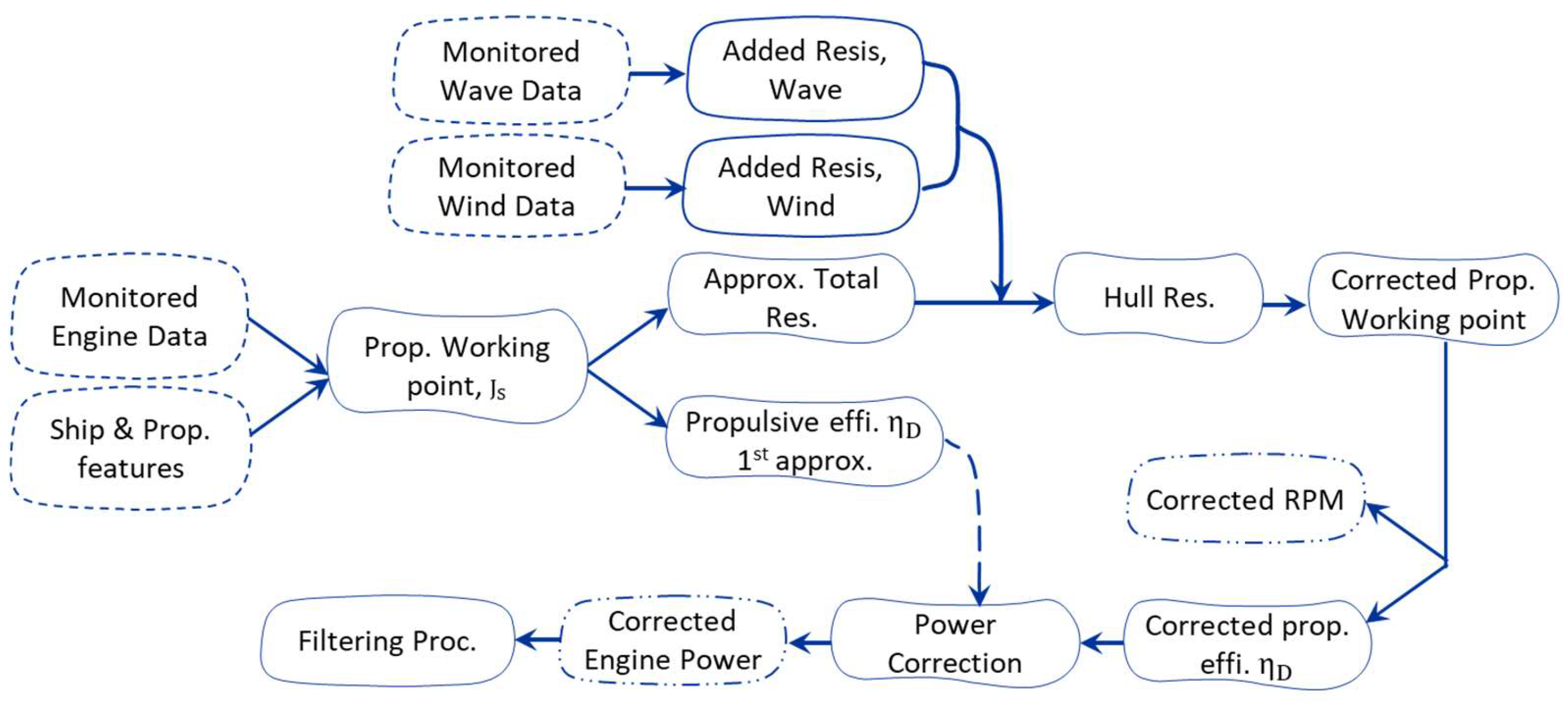
There are several established methods for correcting the speed–power performance of a ship for the influence of weather conditions [
23]. In the current study, we follow the resistance and thrust identity method (RTIM). In line with this method, as applied to a normal range of full-scale ship operations, the ship’s propeller is assumed as producing the same thrust in a wake field of fraction
w as in open water for the same onset flow propeller velocity, and the ship’s total resistance in realistic sea conditions is represented by the linear summation of the calm water resistance and the resistance increases due to the various disturbances encountered.
Figure 3 shows a flowchart for the application of the correction method when considering realistic operational conditions. The definitions of the symbols can be found in a previous work [
24]. It is noted that this procedure is applied for a specific displacement. For a ship in operation under alternative loading conditions, the correction for displacement variation can be conveniently executed through the use of the Admiralty Constant. The application of this method was successfully demonstrated recently [
21,
24].
It should be noted that the estimation of the various resistance components due to operational conditions requires, next to the ship-specific data, the use of corresponding information defining the specific operational effects (e.g., characteristics of acting wind, waves etc.) as well as the monitored ship responses (motions, accelerations, etc.) as input for the employed software or numerical tools. In practice, the extent of the availability of this information may vary significantly. Thus, the application of the proposed correction procedure should be considered together with proper filtering criteria, namely, the effects that cannot be corrected should be filtered out. In the current study, following the concept of reducing the dependence on the monitored measurement, only the wind and wave effects are corrected using the empirical method recommended by ITTC [
25,
26,
27] and based on third party metocean data [
28,
29]. The details of these correction methods and relevant applications have been presented earlier [
24]. In the following, some rational filtering criteria are defined and applied based on hydrodynamic considerations. These filtering criteria consist of the following items:
ship acceleration/deceleration [
30]
course changing
wave conditions
For a ship in operation, it is understood that it is normally not at a constant steady speed or on a straight course. The former is related to acceleration/deceleration, which affects greatly the power requirement on the engine, while the latter often involves rudder action or drift motion, which induces extra resistance and power requirement. Therefore, speed–power data points related by the above effects should be filtered out. Regarding the wave conditions, consideration should be given to the effect on the propulsive efficiency, as observed in various experimental and numerical studies [
31,
32].
It is desirable to develop fast correction methods that can be readily implemented in practice, thus, to conduct a mass, to a great extent automated, correction to all the monitored data points. In the following, we demonstrate the filtering process that can be applied to the corrected results step by step. The user can visually monitor this filtering process to obtain the desired results in a rather convenient way.
3. Case Study Results and Discussions
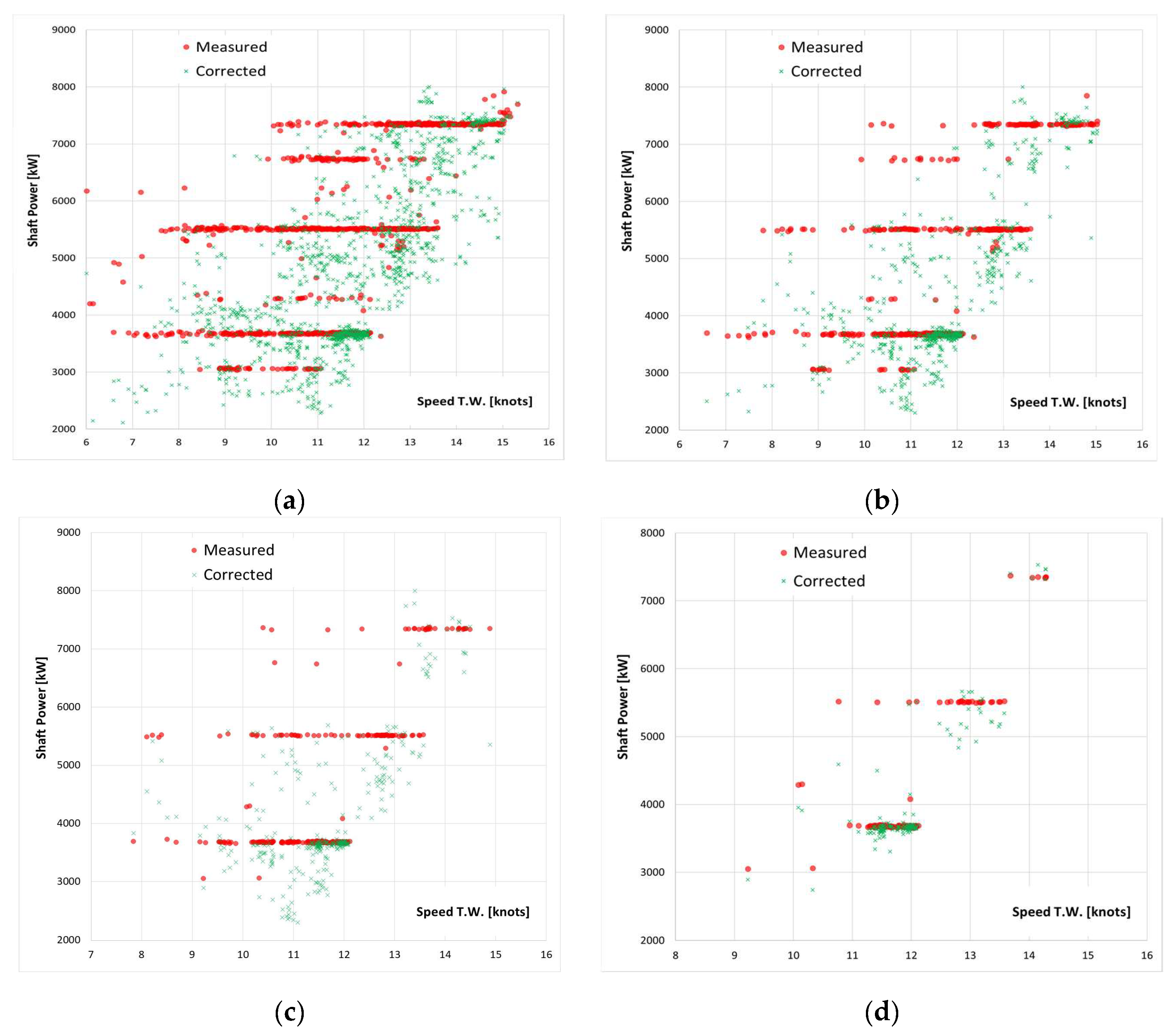
The subject ship in this case study is a chemical tanker with 182 m length overall, 32.26 m beam, and 11 m draft at design condition. The onboard monitored data of the ship in full loaded condition during three North Atlantic crossings performed in a four month period are chosen for analysis.
Figure 4a show the measured and corrected shaft power as a function of speed through the water in knots. From the measured data, it is observed that the main engine has been operating under constant power mode at several powering ratings. The points of green crosses show the power corrected for wind and wave effects, and it is noted that these data may still be polluted by operational conditions.
Figure 4b–d show the filtered results, namely, removing those hydrodynamically non-ideal data following the criteria presented in the previous section, such as ship acceleration, change of course, and certain weather conditions. It is seen that even after the filtering the scattering of these filtered data is still rather large, particularly at low power ratings. There are at least two reasons for this issue. Firstly, for the power correction based on RTIM, it is understood that at lower ratings, the calm water resistance is relatively low and the resistances due to environmental and operational conditions are relatively large, hence, the correction scheme is less accurate. Secondly, there is large uncertainty in measuring the ship’s speed through water, which is affected by the combined influence of surface waves and ocean currents [
33]. At the moment, there is still not available a high fidelity numerical model for predicting the ocean currents [
34]. Highly accurate measuring technology is not available. In the well prepared and controlled speed/power trials, the current effect is still being eliminated by conducting multiple double runs. Hence, the best practice in this ship performance analysis is to further filter out those data polluted by the currents, as pointed out by Bertram [
35]. For
Figure 4d, a further filtering may be carried out for large current speeds that are indicated by the difference between the speed through water and speed over ground.
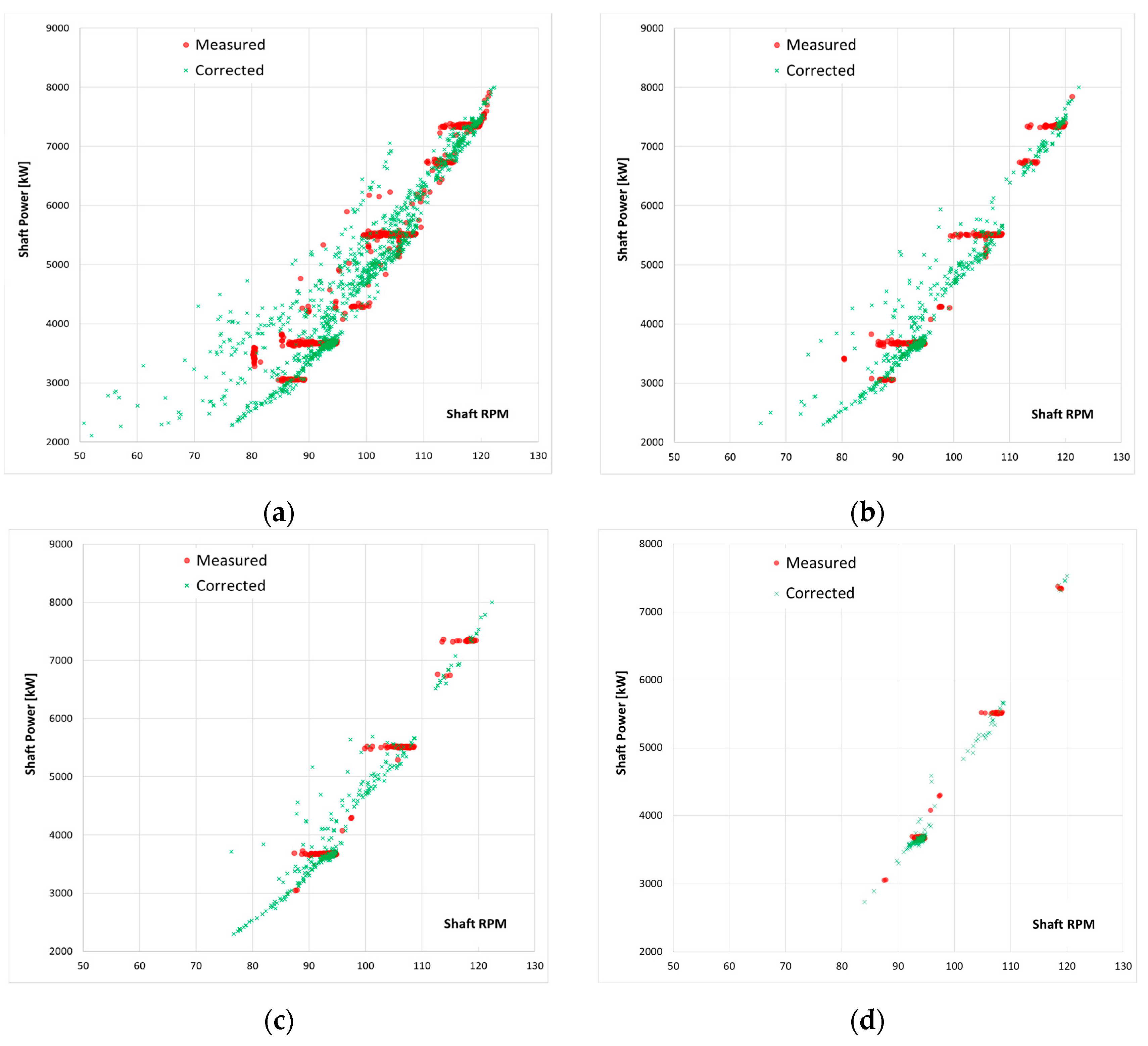
An alternative way of examining the ship’s performance is to check the engine power–RPM performance.
Figure 5a presents the corrected engine power–speed performance based on the same set of data as presented in
Figure 4. As the uncertainty in the ship’s speed measurement is now removed, the scattering of the data is much less predominant.
Figure 5b–d shows the effectiveness of the filtering process based on hydrodynamic criteria.
Figure 5d presents the engine power–speed performance after filtering, where a neat power–speed curve shape is observed. Alternative statistical methods can be applied to derive a best fit of the processed data.
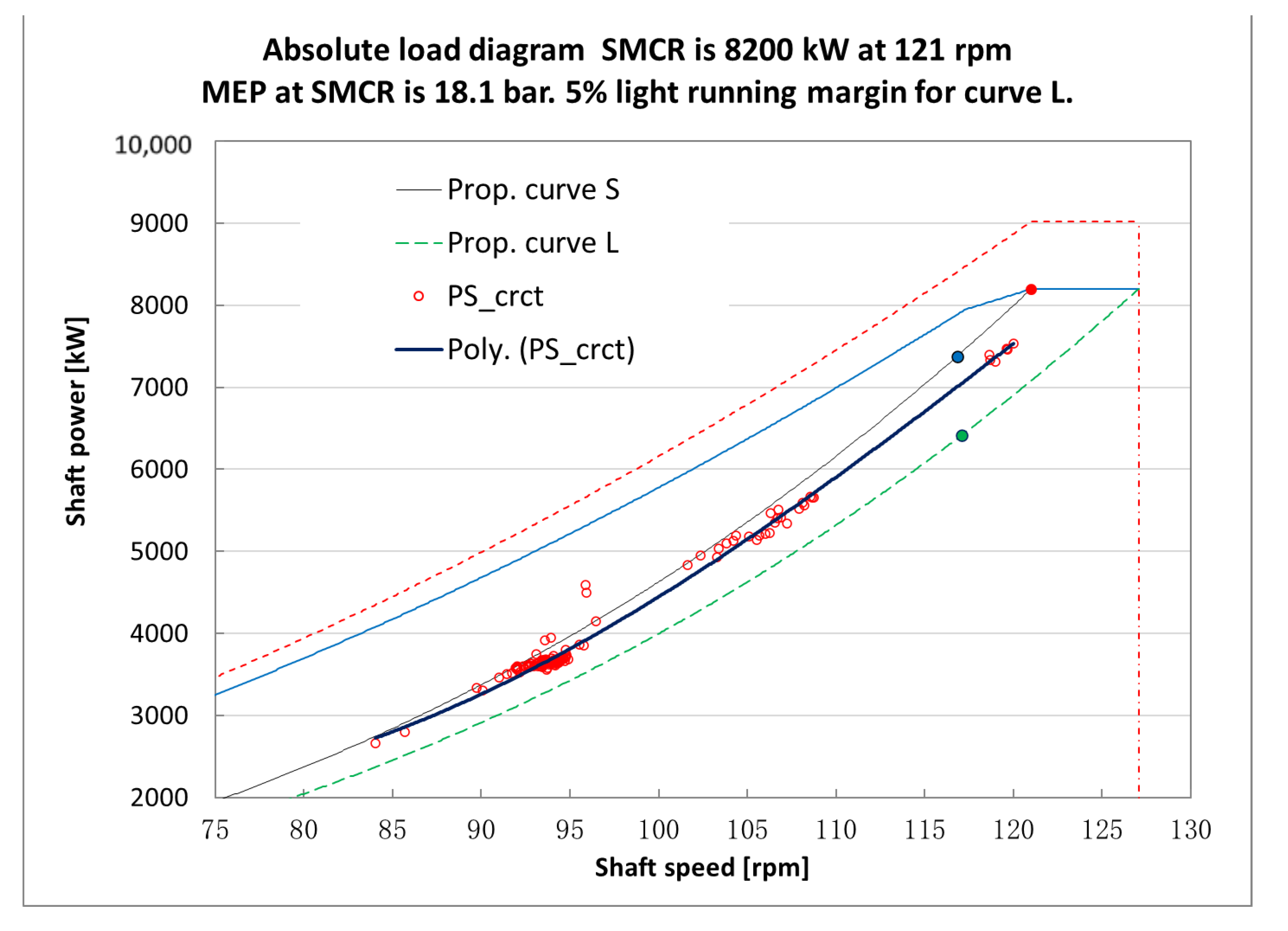
Figure 6 shows the processed data, its best fit curve, being plotted together with the light running and in-service propeller curves in the engine operational envelope [
36]. It is apparent that the best fit curve lies on the left side of the light running propeller curve, which is for clean hull and calm water condition and is used for sizing the engine, indicating that the propeller operational condition is becoming heavier.
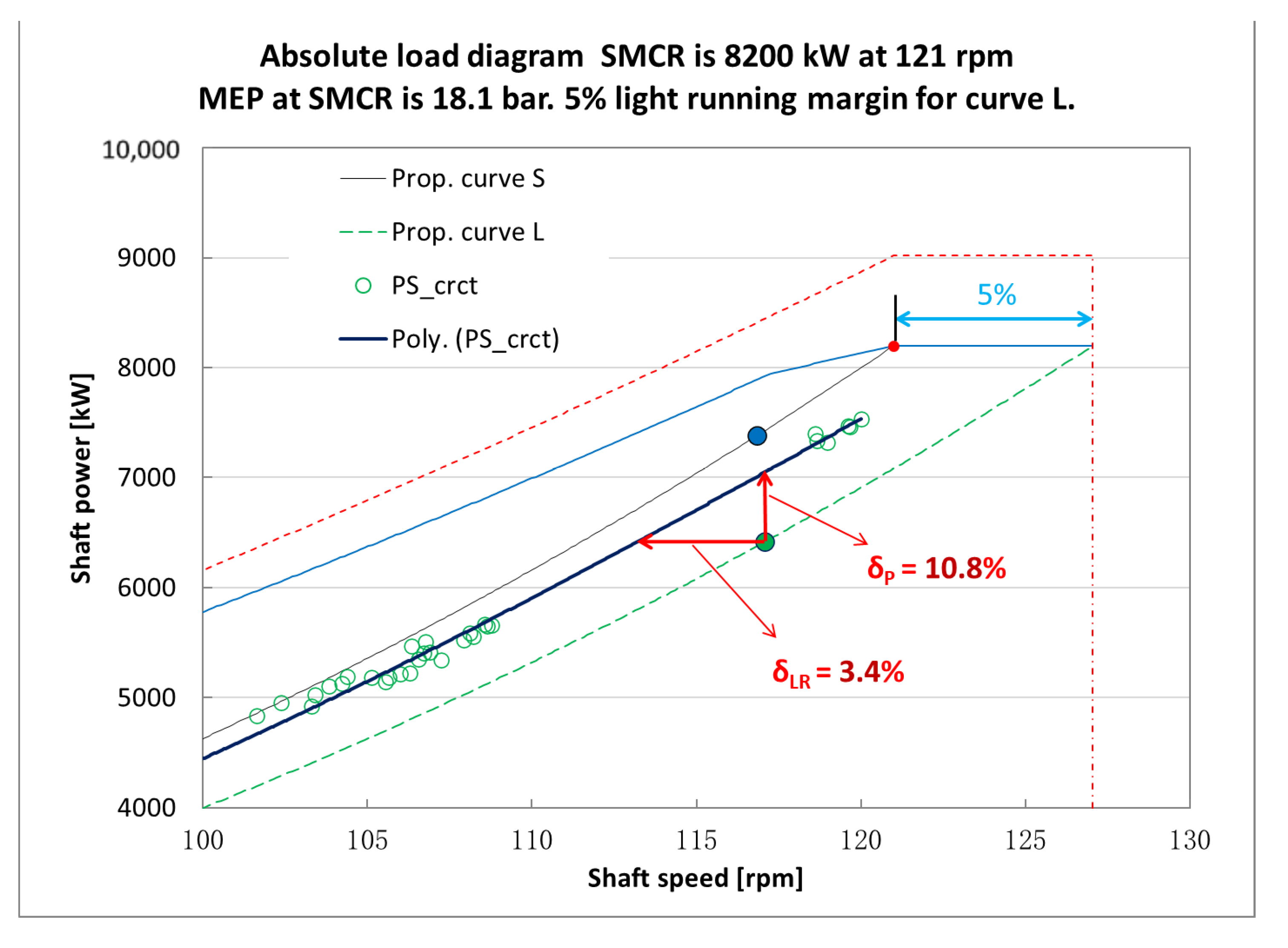
A closer examination of the best fit curve in relation to the light running propeller curve is presented in
Figure 7. Selecting the design point at 78.3% SMCR as reference, two quantities, namely, the percentage decrease in the rate of revolution at the same power (δ
LR) and percentage decrease in power at the same rate of revolution (δ
P), can be conveniently derived to indicate the actual ship’s performance and fouling influence. For this studied case, δ
LR = 3.4% and δ
P = 10.8%. A large portion of the margins, including the 5% light running margin and the 15% sea margin, has been consumed. If the engine mode is set to maintain the same ship speed, hence, engine RPM, the required power would increase from 78.3% SMCR to 87.2% SMCR. Comparing with the SFOC curve from the shop test of the main engine, it is noted that it would increase from 162.3 g/kWh at 78.3% SMCR to 163.5 g/kWh at 87.2% SMCR. Subsequently, for a given voyage, the fuel consumption would increase by 11.6%. The GHG emission preperformance will degrade accordingly.
A further analysis of the ship’s performance can be conducted based on this predicted condition to determine the performance, in terms of attained speed, fuel performance and emission ratings, safe navigation at sea, etc. Such analysis is very useful and necessary for assessing the competitiveness of the ship on the market and for planning ship maintenance.
4. Conclusions
This paper presents a methodology for evaluating the actual propulsive performance of a ship through the analysis of continuous onboard measurement and related metocean data. It enables the development of an efficient procedure to rationally assess the actual ship’s condition and to effectively support the predictive condition-based maintenance of ships. This refers especially to the fouling development on a ship’s hull and propeller in view of reducing fuel consumption, maintaining speed performance and ensuring the GHG emissions are compliant with regulatory requirements.
The methodology is a two-step approach. First, the onboard monitored data are corrected for the wind and wave effects using fast and transparent empirical methods recommended by ITTC. Second, the corrected data are filtered based on hydrodynamic criteria. A case study is presented to demonstrate the effectiveness of the methodology. Based on the case study, it was noticed that there is large uncertainty in the measured ship speed due to the existence of ocean currents and also, possibly, its interaction with surface waves. Subsequently, the engine power–rpm relationship is examined and is found to be a good choice for evaluating the ship’s performance. Next, the processed data are analyzed by advanced mathematical tools to derive an engine power–rpm curve to represent the actual propulsive performance of the ship. By comparing this derived curve with the nominal curve for engine design, it is possible to identify the deterioration in the ship’s condition, represented by the percentage decrease in the rate of revolution at the same power (δLR) and percentage decrease in power at the same rate of revolution (δP). The associated fuel consumption and GHG emission can then be estimated.
In the future, we plan to apply the methodology to the analysis of long-term monitored data for further validation, with a view of developing a robust methodology to support the predictive condition-based maintenance scheme for ships to reduce the maritime sector’s GHG emissions from ship operations.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






