
Shoaling Wave Shape Estimates from Field Observations and Derived Bedload Sediment Rates

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
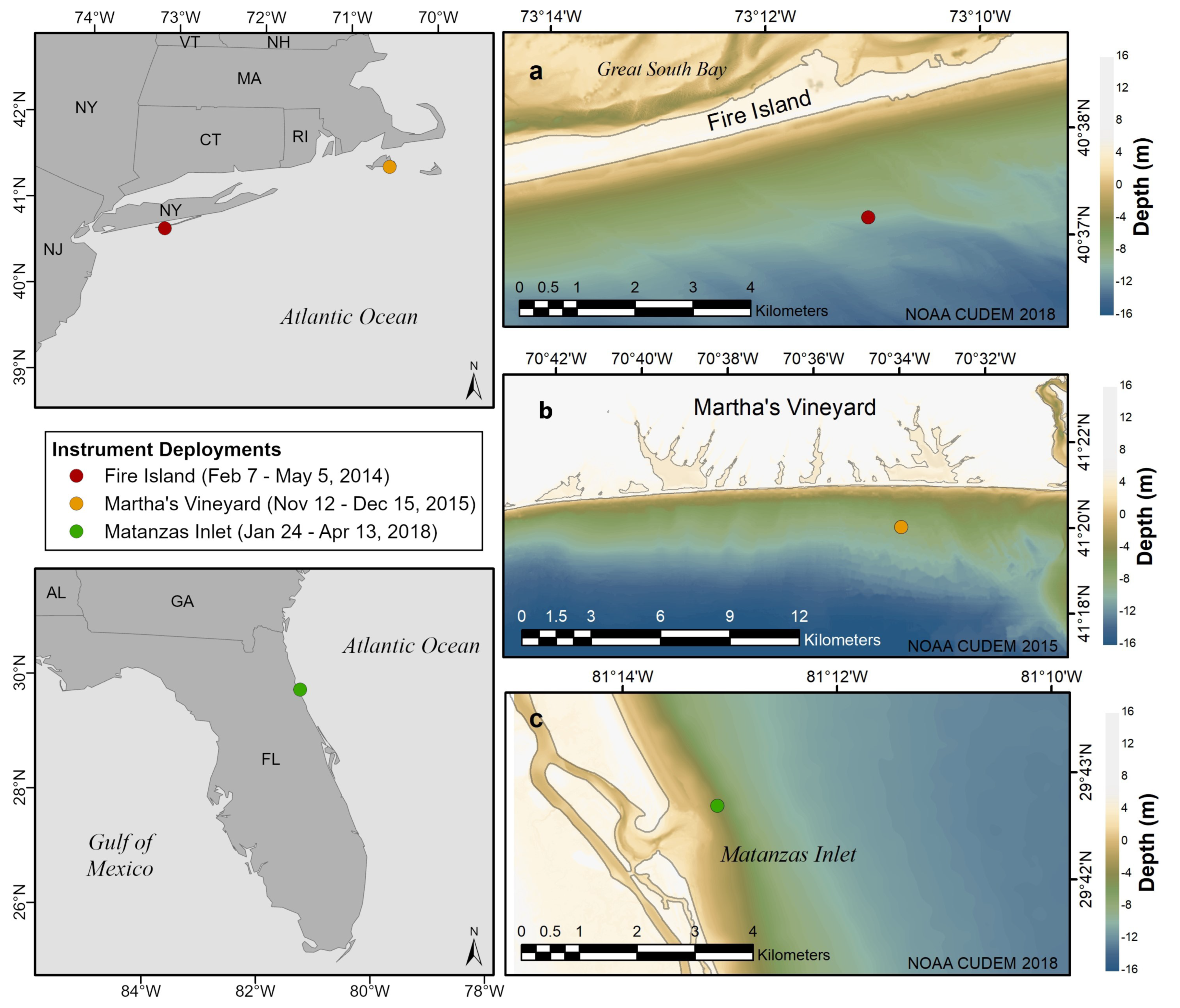
2.1. Field Study Sites
2.2. Parameterized Method: Skewed Waveform Estimation from Surface Wave Data
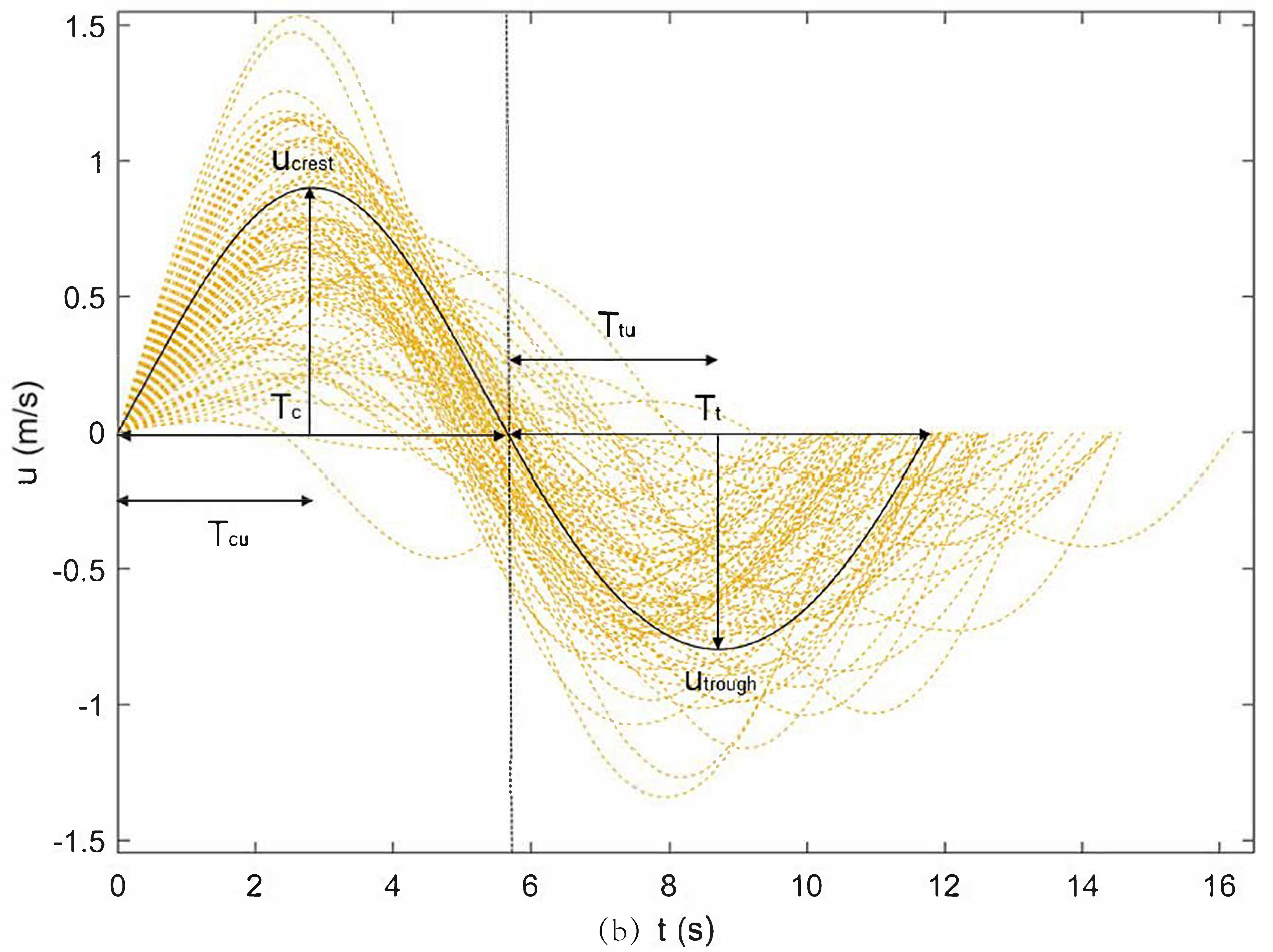
2.3. Direct Method: Skewed Waveform Estimation from Near-Bed Data
2.4. Calculation of Bedload for Skewed Waveforms
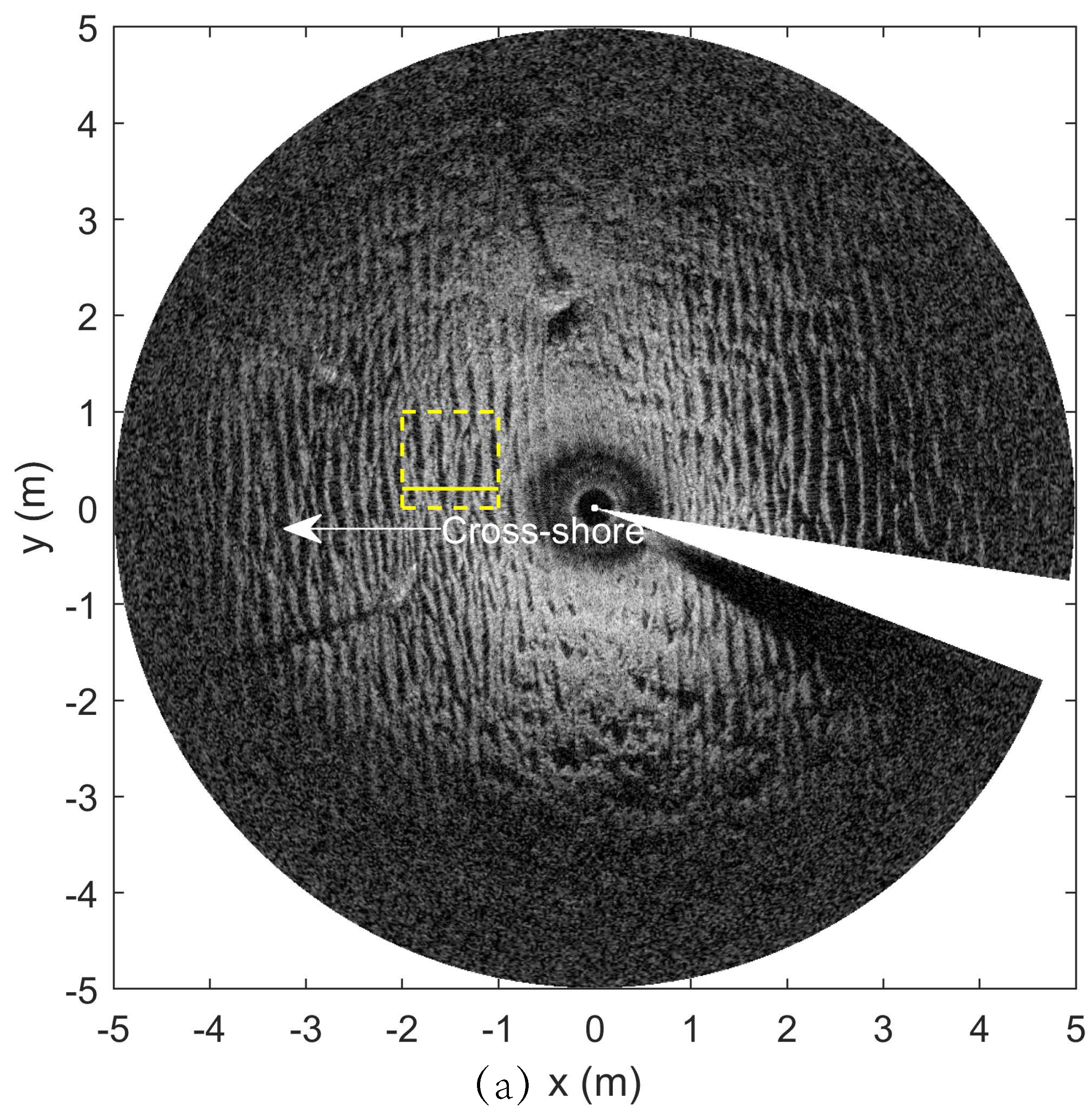
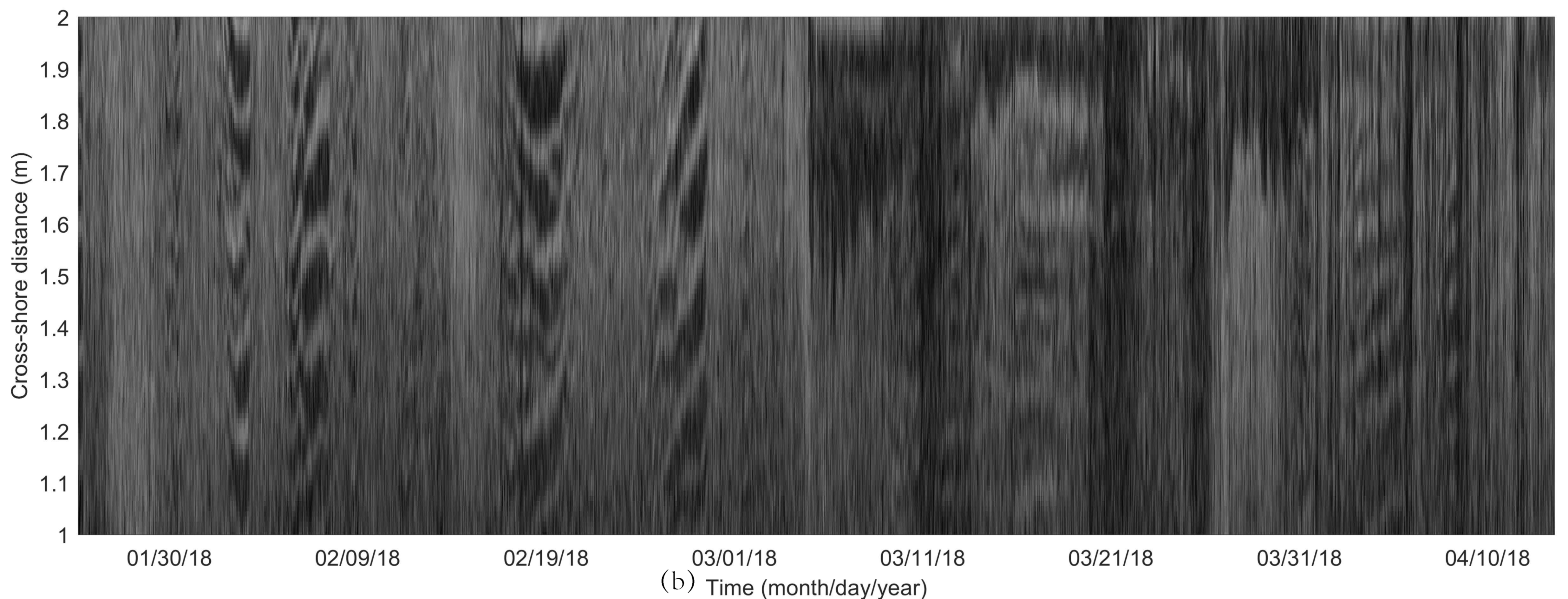
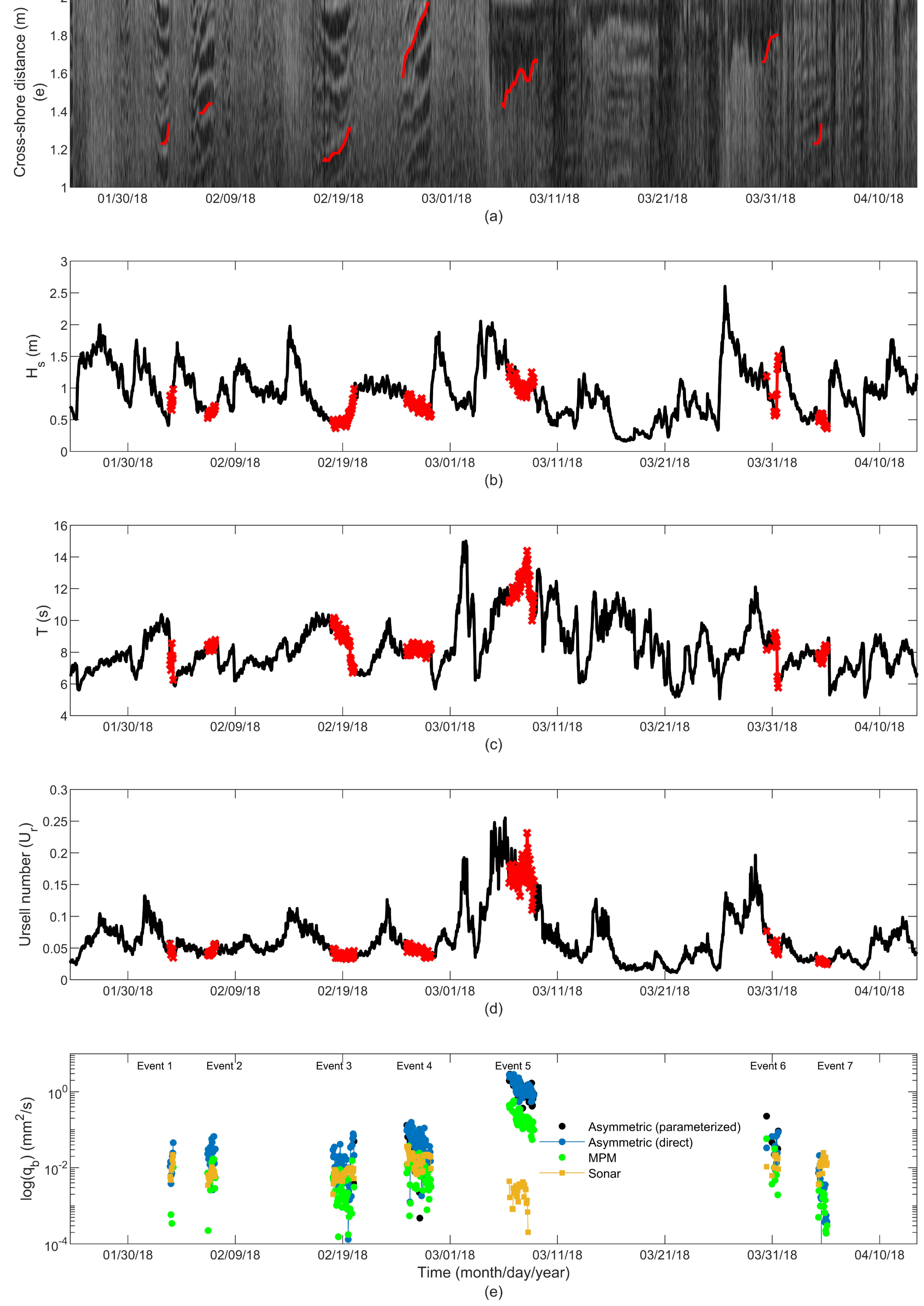
2.5. Sonar Imagery for Bedform Transport Rate from Ripple Migration
3. Results
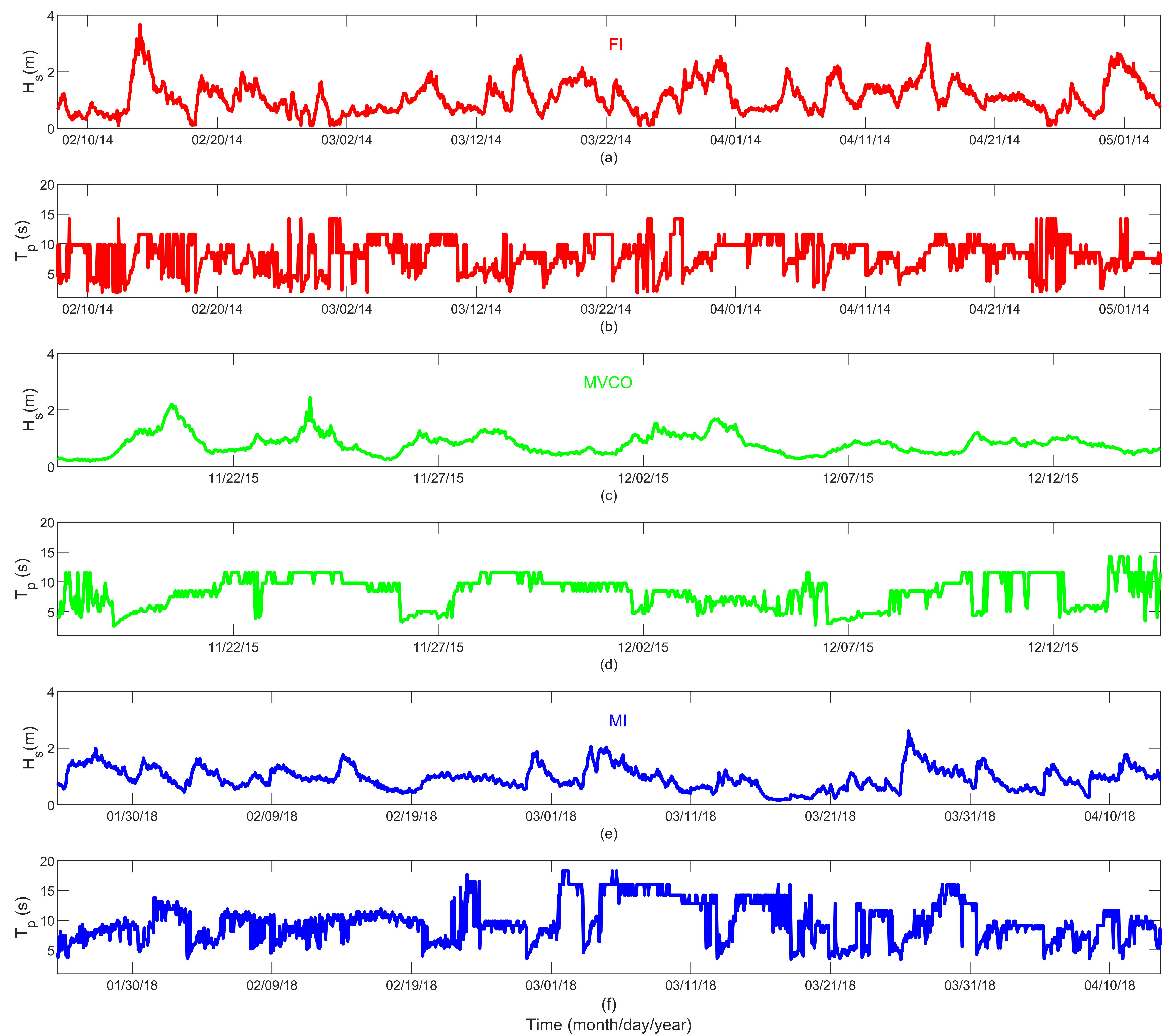
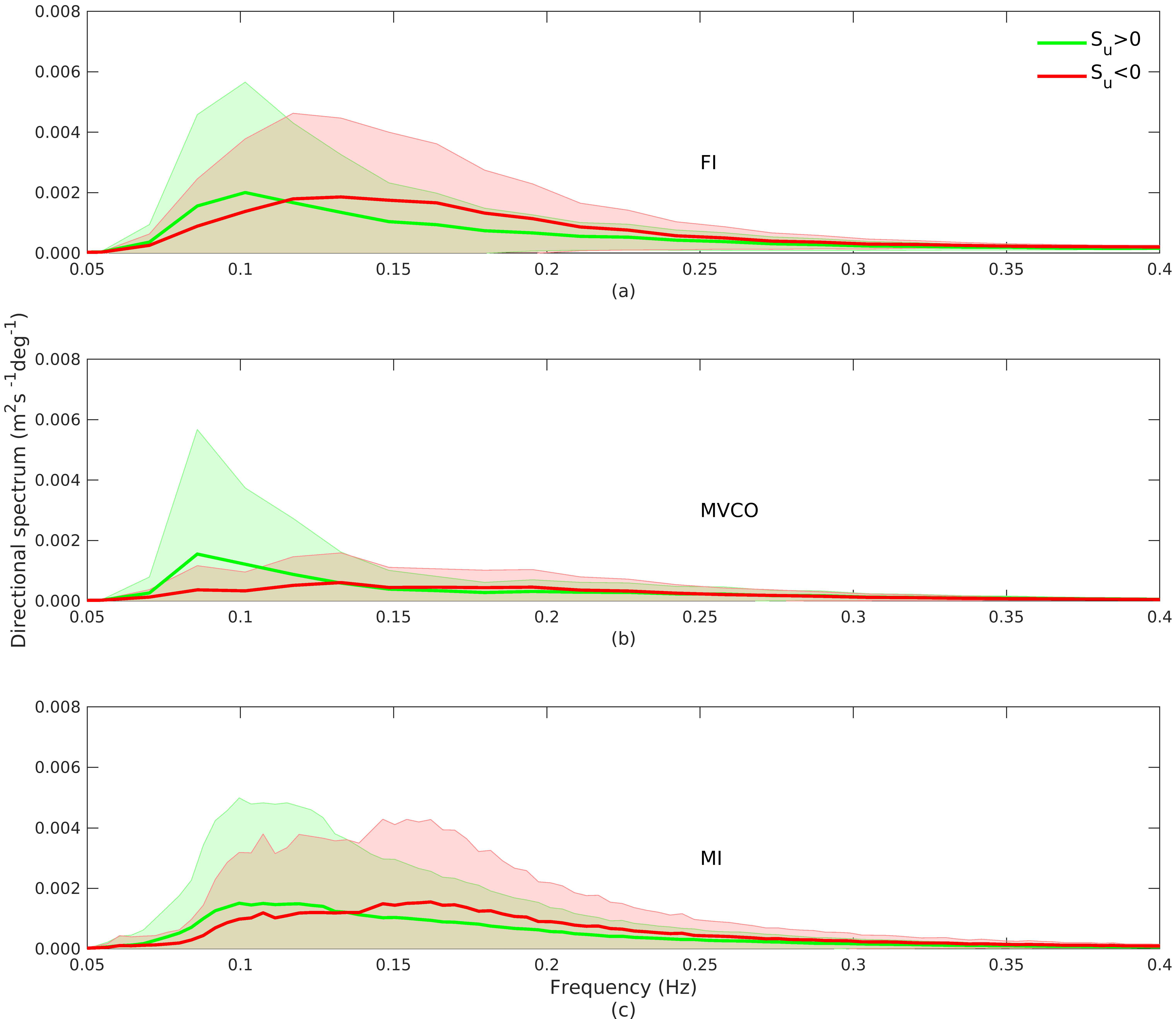
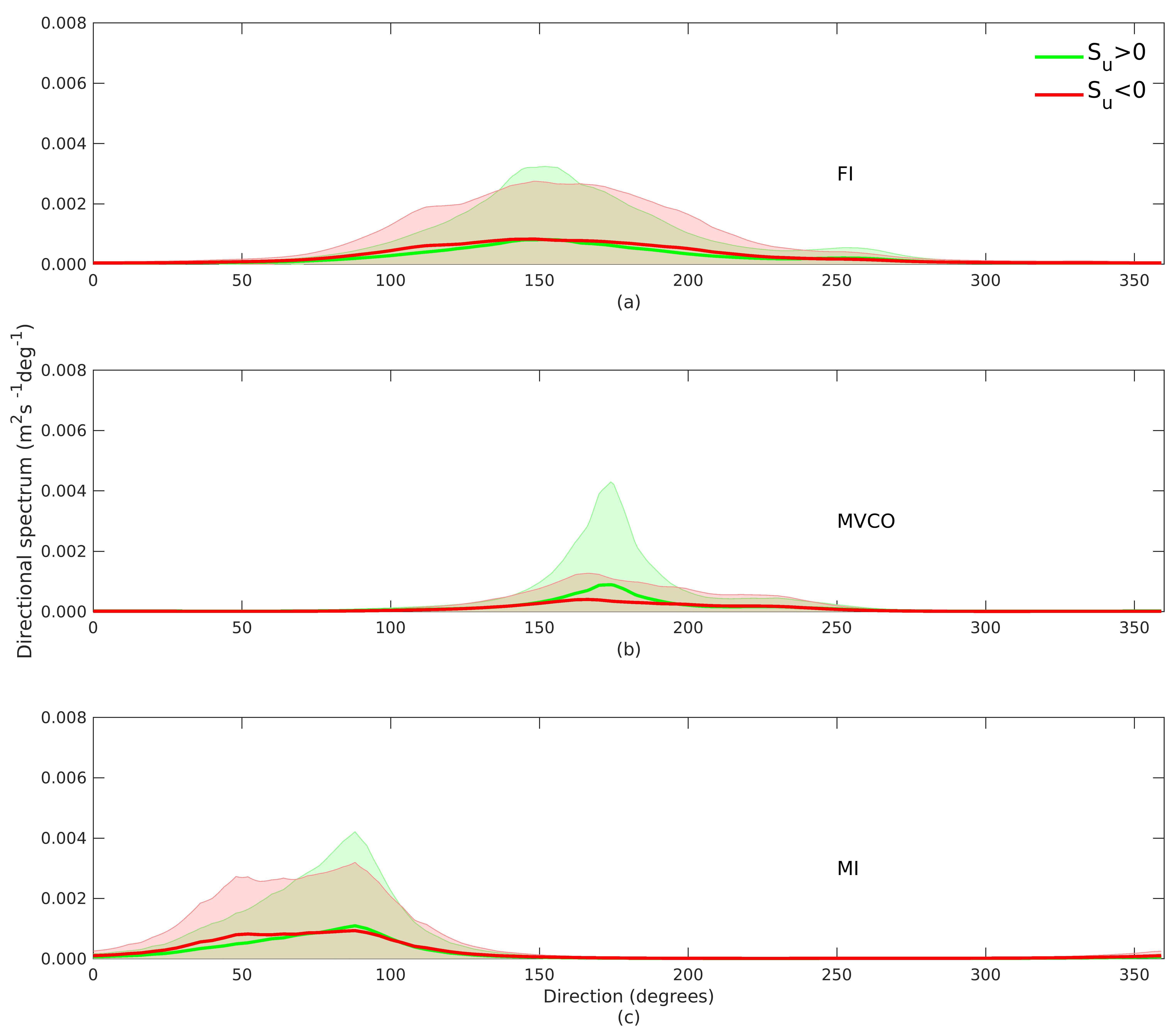
3.1. Surface Wave Statistics
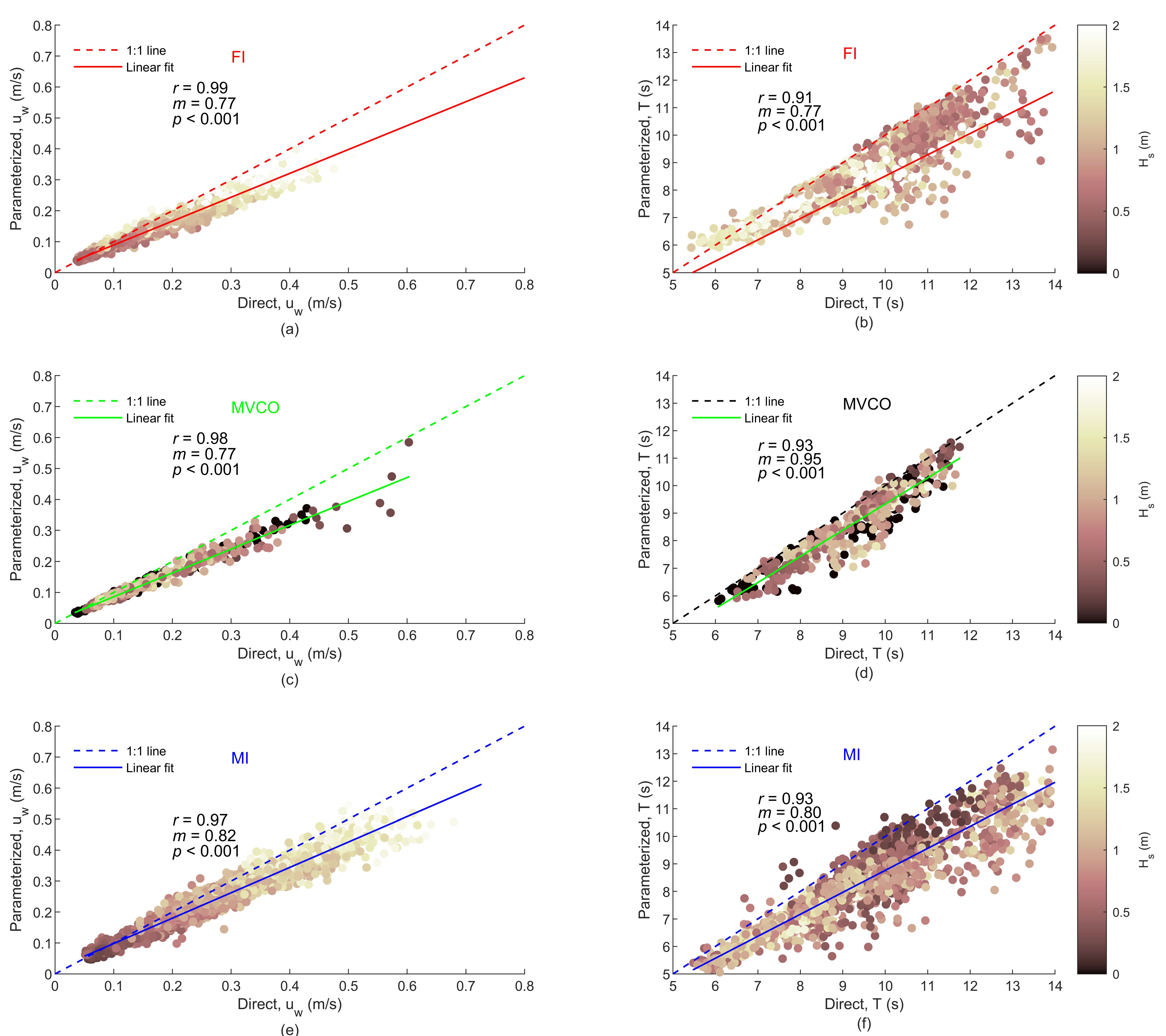
3.2. Comparison of Representative Wave Period and Orbital Velocity from Surface Wave Data and Near-Bed Wave Data
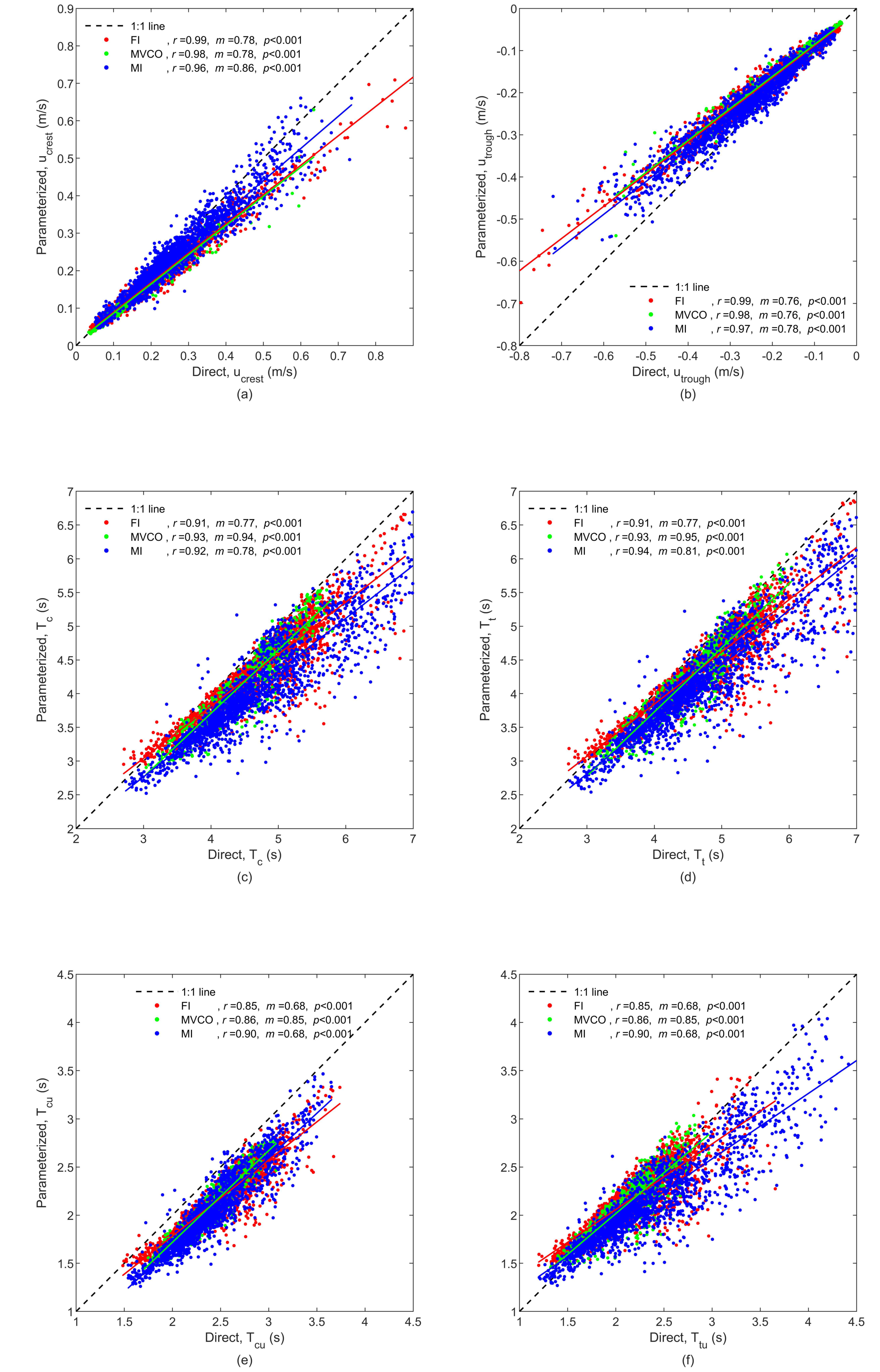
3.3. Skewed Waveform Characteristics: Parameterized and Direct Methods
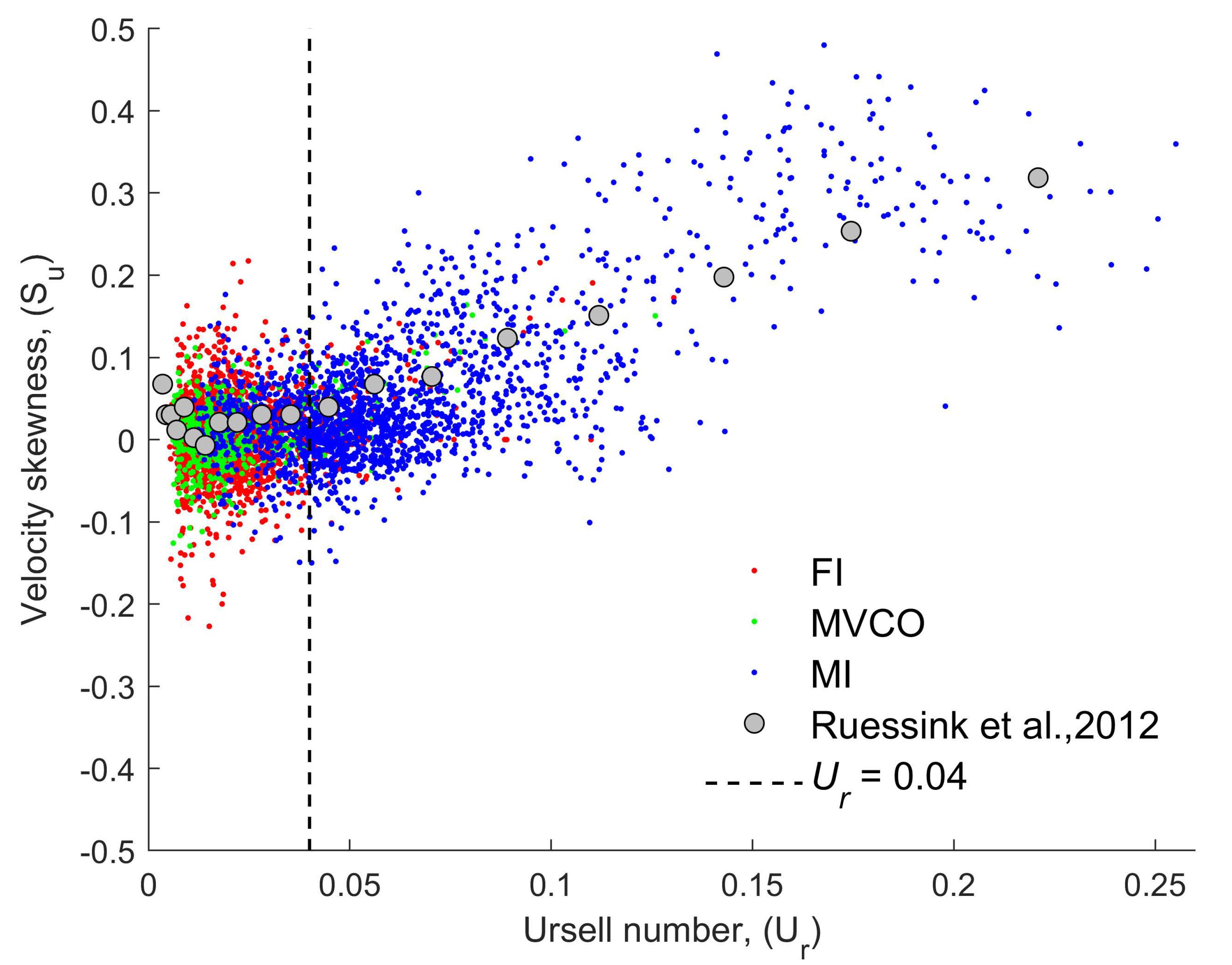
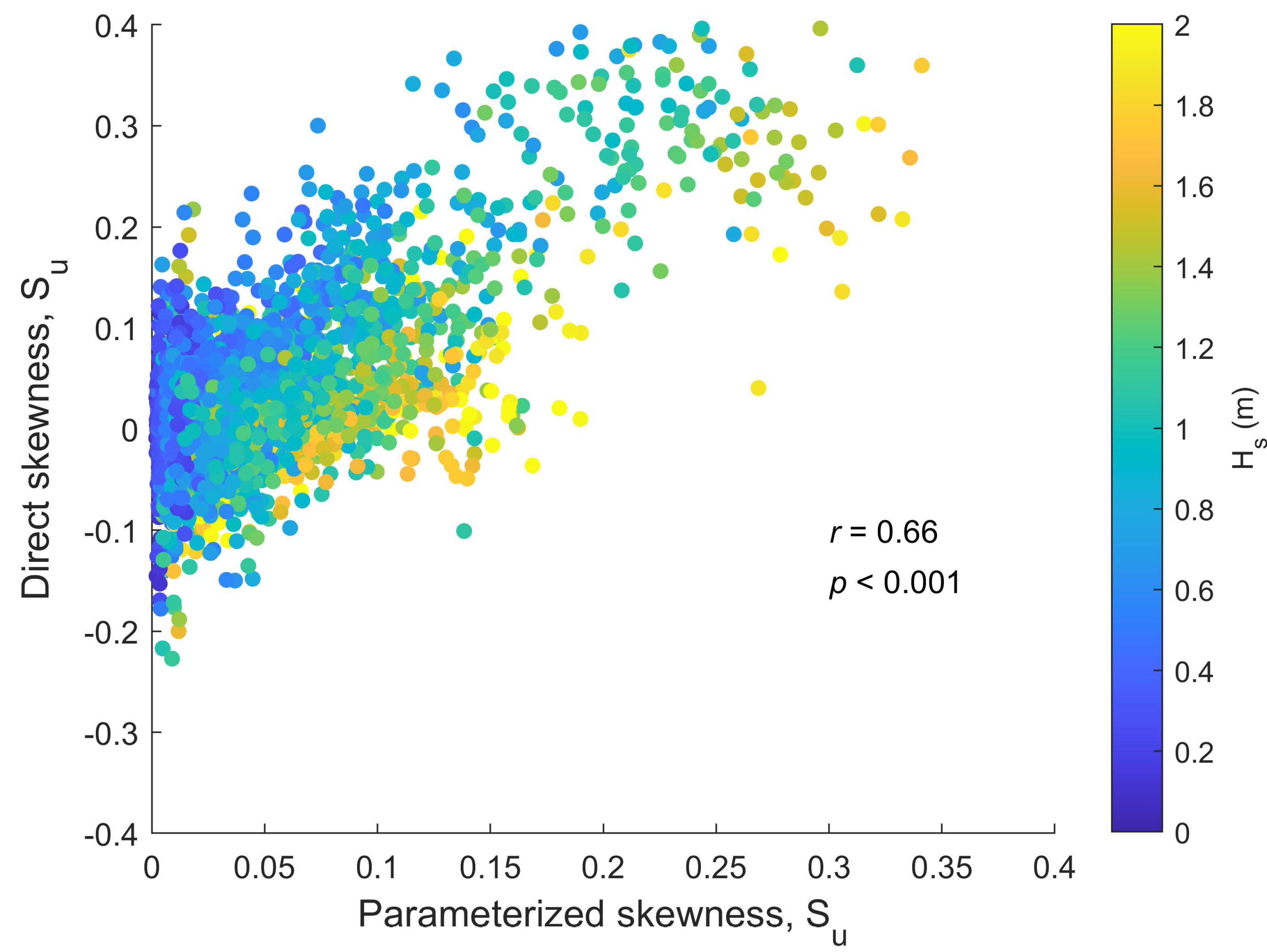
3.4. Wave Skewness
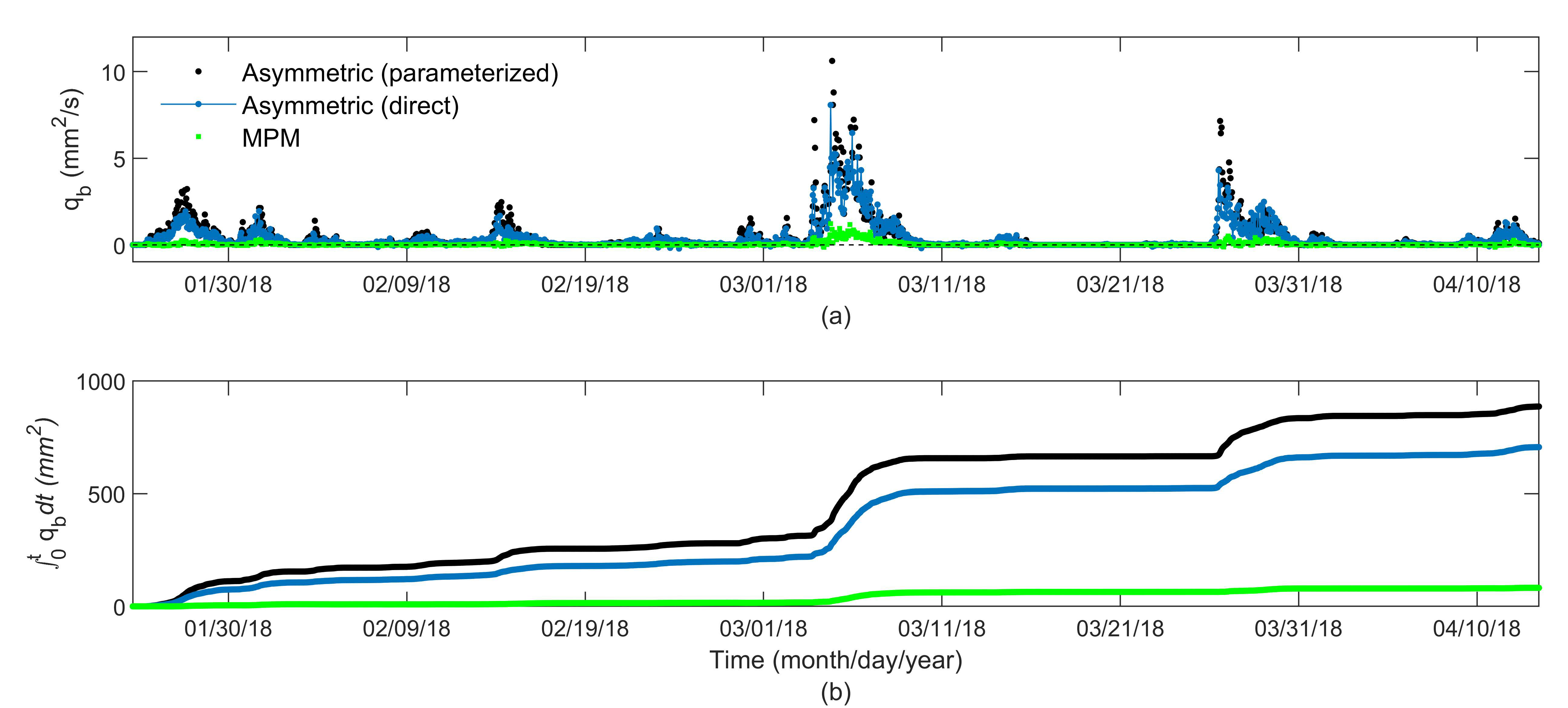
3.5. Estimating Wave-Driven Cross-Shore Bedload Using Skewed Waveform Parameters
4. Discussion
4.1. Skewness Parameterization for Operational Morphodynamic Models
4.2. Bedload Comparison from Various Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Determining Skewed Waveform from Bulk Wave Statistics
Appendix B. Calculation of Wave-Driven Bedload
Appendix C. Calculation of Meyer-Peter and Müller (MPM) Bedload
References
- Svendsen, I.A. Introduction to Nearshore Hydrodynamics; World Scientific: Singapore, 2006; Volume 24, p. 774. [Google Scholar]
- Elfrink, B.; Hanes, D.M.; Ruessink, B.G. Parameterization and simulation of near bed orbital velocities under irregular waves in shallow water. Coast. Eng. 2006, 53, 915–927. [Google Scholar] [CrossRef]
- Abreu, T.; Silva, P.A.; Sancho, F.; Temperville, A. Analytical approximate wave form for non-linear waves. Coast. Eng. 2010, 57, 656–667. [Google Scholar] [CrossRef]
- Ribberink, J.S.; Al-Salem, A.A. Sediment transport in oscillatory boundary layers in cases of rippled beds and sheet flow. J. Geophys. Res. Ocean. 1994, 99, 12707–12727. [Google Scholar] [CrossRef]
- Watanabe, A.; Sato, S. A sheet-flow transport rate formula for asymmetric, forward-leaning waves and currents. Coast. Eng. 2004, 4, 1703–1714. [Google Scholar] [CrossRef]
- Silva, P.A.; Temperville, A.; Seabra Santos, F. Sand transport under combined current and wave conditions: A semi-unsteady, practical model. Coast. Eng. 2006, 53, 897–913. [Google Scholar] [CrossRef] [Green Version]
- Hsu, T.J.; Elgar, S.; Guza, R.T. Wave-induced sediment transport and onshore sandbar migration. Coast. Eng. 2006, 53, 817–824. [Google Scholar] [CrossRef] [Green Version]
- Ruessink, B.G.; Kuriyama, Y.; Reniers, A.J.H.M.; Roelvink, J.A.; Walstra, J.A. Modeling cross-shore sandbar behavior on the timescales of weeks. J. Geophys. Res. Earth Surf. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Mora, A.; Calvete, D.; Falqués, A.; De Swart, H.E. Onshore sandbar migration in the surf zone: New insights into the wave-induced sediment transport mechanisms. Geophys. Res. Lett. 2015, 42, 2869–2877. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.P.; Sato, S.; Liu, H. A sheetflow sediment transport model for skewed-non-linear waves combined with strong opposite currents. Coast. Eng. 2013, 71, 87–101. [Google Scholar] [CrossRef]
- Traykovski, P.; Hay, A.E.; Irish, J.D.; Lynch, J.F. Geometry, migration, and evolution of wave orbital ripples at LEO. J. Geophys. Res. Ocean. 1999, 104, 1505–1524. [Google Scholar] [CrossRef]
- Crawford, A.M.; Hay, A.E. Linear transition ripple migration and wave orbital velocity skewness: Observations. J. Geophys. Res. 2001, 106, 113–128. [Google Scholar] [CrossRef]
- Hurther, D.; Thorne, P.D. Suspension and near bed load sediment transport processes above a migrating, sand rippled bed under shoaling waves. J. Geophys. Res. 2011, 116, C07001. [Google Scholar] [CrossRef] [Green Version]
- Drake, G.; Calantoni, J. Discrete particle model for sheet flow sediment transport in the nearshore. J. Geophys. Res. 2001, 106, 19859–19868. [Google Scholar] [CrossRef]
- Hoefel, F.; Elgar, S. Wave-induced sediment transport and sandbar migration. Science 2003, 299, 1885–1887. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nielsen, P. Sheet flow sediment transport under waves with acceleration skewness and boundary layer streaming. Coast. Eng. 2006, 53, 749–758. [Google Scholar] [CrossRef]
- Ranasinghe, R.; Pattiaratchi, C.; Masselink, G. Morphodynamic model to simulate the seasonal closure of tidal inlets. Coast. Eng. 1999, 37, 1–36. [Google Scholar] [CrossRef]
- van der Zanden, J.; van der A, D.A.; Hurther, D.; Cáceres, I.; O’Donoghue, T.; Hulscher, S.J.M.H.; Ribberink, J.S. Bedload and suspended load contributions to breaker bar morphodynamics. Coast. Eng. 2017, 129, 74–92. [Google Scholar] [CrossRef]
- Mieras, R.S.; Puleo, J.A.; Anderson, D.; Hsu, T.-J.; Cox, D.T.; Calantoni, J. Relative contributions of bed load and suspended load to sediment transport under skewed-asymmetric waves on a sandbar crest. J. Geophys. Res. Oceans 2019, 124, 1294–1321. [Google Scholar] [CrossRef]
- Ridderinkhof, W.; de Swart, H.E.; van der Vegt, M.; Hoekstra, P. Modeling the growth and migration of sandy shoals on ebb-tidal deltas. J. Geophys. Res. Earth Surf. 2016, 121, 1351–1372. [Google Scholar] [CrossRef] [Green Version]
- Reniers, A.J.H.M.; De Wit, F.P.; Tissier, M.F.S.; Pearson, S.G.; Brakenhoff, L.B.; Vegt, V.D.; Mol, J.; Van Prooien, B.C. Wave-skewness and current-related ebb-tidal sediment transport: Observations and modeling coastal sediments. In Proceedings of the 9th International Conference on Coastal Sediments, St. Petersburg, FL, USA, 27–31 May 2019; pp. 2018–2028. [Google Scholar] [CrossRef]
- Lenstra, K.J.H.; Pluis, S.R.P.M.; Ridderinkhof, W.; Ruessink, G.; Van der Vegt, M. Cyclic channel-shoal dynamics at the Ameland inlet: The impact on waves, tides, and sediment transport. Ocean. Dyn. 2019, 69, 409–425. [Google Scholar] [CrossRef] [Green Version]
- De Wit, F.; Tissier, M.; Reniers, A. Characterizing wave shape evolution on an ebb-tidal shoal. J. Mar. Sci. Eng. 2019, 7, 367. [Google Scholar] [CrossRef] [Green Version]
- Gazi, A.H.; Purkayastha, S.; Afzal, M.S. The equilibrium scour depth around a pier under the action of collinear waves and current. J. Mar. Sci. Eng. 2020, 8, 36. [Google Scholar] [CrossRef] [Green Version]
- Gazi, A.H.; Saud, M.S. A new mathematical model to calculate the equilibrium scour depth around a pier. Acta Geophys. 2020, 68, 181–187. [Google Scholar] [CrossRef]
- Zhang, G.; Chen, Y.; Cheng, W.; Zhang, H.; Gong, W. Wave effects on sediment transport and entrapment in a channel-shoal estuary: The Pearl River estuary in the dry winter season. J. Geophys. Res. Ocean. 2021, 126. [Google Scholar] [CrossRef]
- Roelvink, D.; Reniers, A.; Van Dongeren, A.; Van Thiel de Vries, J.; McCall, R.; Lescinski, J. Modelling storm impacts on beaches, dunes and barrier islands. Coast. Eng. 2009, 56, 1133–1152. [Google Scholar] [CrossRef]
- Warner, J.C.; Armstrong, B.; He, R.; Zambon, J.B. Development of a coupled ocean-atmosphere-wave-sediment transport (COAWST) modeling system. Ocean. Model. 2010, 35, 230–244. [Google Scholar] [CrossRef] [Green Version]
- Sherwood, C.R.; Dongeren, A.V.; Doyle, J.; Hegermiller, C.A.; Hsu, T.J.; Kalra, T.S.; Olabarrieta, M.; Penko, A.M.; Rafati, Y.; Roelvink, D.; et al. Modeling the morphodynamics of coastal responses to extreme events: What shape are we in? Annu. Rev. Mar. Sci. 2022, 14, 457–492. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.; Smit, P. SWASH: An operational public domain code for simulating wave fields and rapidly varied flows in coastal waters. Coast. Eng. 2011, 58, 992–1012. [Google Scholar] [CrossRef]
- Malej, M.; Mith, J.M.; Salgado-Dominguez, G. Introduction to Phase-Resolving Wave Modeling with FUNWAVE; ERDC/CHL CHETN-I-87; US Army Corps of Engineers: Washington, DC, USA, 2015. [Google Scholar]
- Doering, J.C.; Elfrink, B.; Daniel, M.; Hanes, D.M.; Ruessink, G. Parameterization of velocity skewness under waves and its effect on cross-shore sediment transport. Coast. Eng. 2000, 276, 1383–1397. [Google Scholar] [CrossRef]
- Isobe, M.; Horikawa, K. Study on water particle velocities of shoaling and breaking waves. Coast. Eng. 1982, 25, 109–123. [Google Scholar] [CrossRef]
- Ruessink, B.G.; Ramaekers, G.; Van Rijn, L.C. On the parameterization of the free-stream non-linear wave orbital motion in nearshore morphodynamic models. Coast. Eng. 2012, 65, 56–63. [Google Scholar] [CrossRef]
- Albernaz, M.B.; Ruessink, G.; Bert Jagers, H.R.A.; Kleinhans, M.G. Effects of wave orbital velocity parameterization on nearshore sediment transport and decadal morphodynamics. J. Mar. Sci. Eng. 2019, 7, 188. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.L.; Dodd, N. An idealised study for the evolution of a shoreface nourishment. Cont. Shelf Res. 2019, 178, 15–26. [Google Scholar] [CrossRef]
- Rafati, Y.; Hsu, T.-J.; Elgar, S.; Raubenheimer, B.; Quataert, E.; van Dongeren, A. Modeling the hydrodynamics and morphodynamics of sandbar migration events. Coast. Eng. 2021, 166, 103885. [Google Scholar] [CrossRef]
- 38. van der, A.D.A.; Ribberink, J.S.; van der Werf, J.J.; O’Donoghue, T.; Buijsrogge, R.H.; Kranenburg, W.M. Practical sand transport formula for non-breaking waves and currents. Coast. Eng. 2013, 76, 26–42. [Google Scholar] [CrossRef] [Green Version]
- Soulsby, R.L. Dynamics of Marine Sands; Thomas Telford Publications: London, UK, 1997. [Google Scholar]
- Armstrong, B.N.; Warner, J.C.; List, J.H.; Martini, M.A.; Montgomery, E.T.; Traykovski, P.; Voulgaris, G. Coastal Change Processes Project Data Report for Oceanographic Observations near Fire Island, New York, February through May 2014: U.S. Geological Survey Open-File Report; USGS: Reston, VA, USA, 2015; Volume 1033. [CrossRef]
- Armstrong, B.N.; Warner, J.C.; List, J.H.; Martini, M.A.; Montgomery, E.T. Oceanographic Measurements—Fire Island, NY, Nearshore, 2014: U.S. Geological Survey Data Release; USGS: Reston, VA, USA, 2015. [CrossRef]
- Martini, M.A.; Montgomery, E.T.; Sherwood, C.R. Oceanographic and Water-Quality Measurements Collected South of Martha’s Vineyard, MA, November–December 2015: U.S. Geological Survey Data Release; USGS: Reston, VA, USA, 2017. [CrossRef]
- Suttles, S.E.; Warner, J.C.; Montgomery, E.T.; Martini, M.A. Oceanographic and Water Quality Measurements in the Nearshore Zone at Matanzas Inlet, Florida, January–April, 2018: U.S. Geological Survey Data Release; USGS: Reston, VA, USA, 2018. [CrossRef]
- Wiberg, P.L.; Sherwood, C.R. Calculating wave-generated bottom orbital velocities from surface-wave parameters. Comput. Geosci. 2008, 34, 1243–1262. [Google Scholar] [CrossRef]
- Silva, P.A.; Abreu, T.; Dominic, V.D.A.A.; Sancho, F.; Ruessink, B.G.; Van der Werf, J.J.; Ribberink, J.S. Sediment transport in nonlinear skewed oscillatory flows: Transkew experiments. J. Hydraul. Res. 2011, 49, 72–80. [Google Scholar] [CrossRef] [Green Version]
- Malarkey, J.; Davies, A.G. Free-stream velocity descriptions under waves with skewness and asymmetry. Coast. Eng. 2012, 68, 78–95. [Google Scholar] [CrossRef]
- Voulgaris, G.; Morin, J.P. A long-term real time sea bed morphology evolution system in the South Atlantic Bight. In Proceedings of the IEEE/OES 9th Working Conference on Current Measurement Technology, Charleston, SC, USA, 17–19 March 2008; pp. 71–79. [Google Scholar] [CrossRef]
- Cheel, R.A.; Hay, A.E. Cross-ripple patterns and wave directional spectra. J. Geophys. Res. 2008, 113, C10009. [Google Scholar] [CrossRef] [Green Version]
- Englert, C.M. Development of a Spectral 2-D Fast Fourier Transform Analysis for Sand Ripple Morphology Interpretation. Honors Thesis, Paper 583. Colby College, Waterville, ME, USA, 2010. [Google Scholar]
- Nelson, T.R.; Voulgaris, G. Temporal and spatial evolution of wave-induced ripple geometry: Regular versus irregular ripples. J. Geophys. Res. Ocean. 2014, 119, 664–688. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Elgar, S. Relationships involving third moments and bispectra of a harmonic process. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1725–1726. [Google Scholar] [CrossRef]
- Ribberink, J.S.; Van der, A.D.A.; Buijsrogge, R.H. Santoss Transport Model: A New Formula for Sand Transport under Waves and Currents; Report number: SANTOSS_UT_IR3; University of Twente: Enschede, The Netherlands; University of Aberdeen: Aberdeen, UK, 2010. [Google Scholar]
- Holmedal, L.E.; Myrhaug, D.; Håvard, R. The sea bed boundary layer under random waves plus current. Cont. Shelf Res. 2003, 27, 717–750. [Google Scholar] [CrossRef]
- Afzal, M.S.; Holmedal, L.E.; Myrhaug, M. Sediment transport in combined wave–current seabed boundary layers due to streaming. J. Hydraul. Eng. 2021, 147. [Google Scholar] [CrossRef]
- Kim, Y.; Cheng, Z.; Hsu, T.-J.; Chauchat, J. A numerical study of sheet flow under monochromatic nonbreaking waves using a free surface resolving Eulerian two-phase flow model. J. Geophys. Res. Ocean. 2018, 123, 4693–4719. [Google Scholar] [CrossRef]
- Kranenburg, W.M.; Ribberink, J.S.; Schretlen, J.J.L.M.; Uittenbogaard, R.E. Sand transport beneath waves: The role of progressive wave streaming and other free surface effects. J. Geophys. Res. Earth Surf. 2013, 118, 122–139. [Google Scholar] [CrossRef] [Green Version]
- Cienfuegos, R.; Barthelemy, E.; Bonneton, P.; Gondran, X. Nonlinear surf zone wave properties as estimated from boussinesq modelling: Random waves and complex bathymetries. Coast. Eng. 2006, 5, 360–371. [Google Scholar] [CrossRef] [Green Version]
- Rocha, M.V.L.; Michallet, H.; Silva, P.A. Improving the parameterization of wave nonlinearities—The importance of wave steepness, spectral bandwidth and beach slope. Coast. Eng. 2017, 121, 77–89. [Google Scholar] [CrossRef]
- Doering, J.C.; Bowen, A.J. Parametrization of orbital velocity asymmetries of shoaling and breaking waves using bispectral analysis. Coast. Eng. 1995, 26, 15–33. [Google Scholar] [CrossRef]
- O’Donoghue, T.; Doucette, J.S.; Van der Werf, J.J.; Ribberink, J.S. The dimensions of sand ripples in full-scale oscillatory flows. Coast. Eng. 2006, 53, 997–1012. [Google Scholar] [CrossRef]
- Kalra, T.S.; Sherwood, C.R.; Warner, J.C.; Rafati, Y.; Hsu, T.J. Investigating bedload transport under asymmetrical waves using a coupled ocean-wave model. In Proceedings of the 9th International Conference on Coastal Sediments, St. Petersburg, FL, USA, 27–31 May 2019; World Scientific: Singapore; pp. 591–604. [Google Scholar] [CrossRef]
- Schretlen, J.J.L.M. Ph.D. Thesis, University of Twente, Enschede, The Netherlands, 2010.
- Nielsen, P. Coastal Bottom Boundary Layers and Sediment Transport; World Scientific: Singapore, 1992. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Parameter | Fire Island, NY (40.6193, −73.1840) | MVCO, MA (41.3337, −70.5659) | Matanzas Inlet, FL (29.7114, −81.2186) |
|---|---|---|---|
| ADV burst | 9917advb-cal.nc | 10577vecb-cal.nc | 11109vecb-a.nc |
| ADV burst statistics | 9917advs-cal.nc | 10577vecs-a.nc | 11109vecs-a.nc |
| Workhorse | 9921whp-cal.nc | 10571whVp-cal.nc | 11101whVp-cal.nc and |
| Seabird Seaguage | - | - | - |
| Sonar | - | - | 11107hffan_raw.cdf |
| ADV burst | 9917advb-cal.nc | 10577vecb-cal.nc | 11109vecb-a.nc |
| Site Location | Fire Island, NY (40.6193, −73.1840) | MVCO, MA (41.3337, −70.5659) | Matanzas Inlet, FL (29.7114, −81.2186) |
|---|---|---|---|
| Collection period | 7 February–5 May 2014 | 12 November 15–December 2015 | 24 January–13 April 2018 |
| Sensor type | RD Instruments ADCP | TRDI V | TRDI V |
| Instrument frequency | 600 kHz | 1000 kHz | 1000 kHz |
| Burst sampling rate | 2 Hz | 2 Hz | 2 Hz |
| Burst sampling length | 1024 s every hour | 1024 s every hour | 2048 s every hour |
| Initial instrument elevation above bottom | 2.1 m | 2.4 m | 2.4 m |
| Site Location | Fire Island, NY | MVCO, MA | Matanzas Inlet, FL |
|---|---|---|---|
| Collection period | 7 February–3 May 2014 | 17 November–8 December 2015 | 24 January–13 April 2018 |
| Sensor type | Sontek ADV | Nortek Vector ADV | Nortek Vector ADV |
| Instrument acoustic frequency Burst sampling rate | 5000 kHz 8 Hz | 6000 kHz 16 Hz | 6000 kHz 16 Hz |
| Burst sampling length | 1050 s every hour | 1875 s every hour | 2048 s every hour |
| Measurement location (height above bed) | 0–35 cm | 64 cm | 20–40 cm |
| Pressure sensor height | 1.14–1.5 m | 1.69 m | 1.97 m |
| Wave Parameter | Fire Island, NY | MVCO, MA | Matanzas Inlet, FL | |||
|---|---|---|---|---|---|---|
| E1 | E2 | E1 | E2 | E1 | E2 | |
| uw (m/s) | 0.04 | 19.63 | 0.04 | 20.62 | 0.05 | 15.89 |
| T (s) | 0.91 | 9.50 | 0.78 | 8.44 | 1.34 | 13.88 |
| ucrest (m/s) | 0.04 | 19.02 | 0.04 | 20.17 | 0.04 | 14.76 |
| utrough (m/s) | 0.04 | 20.28 | 0.04 | 21.13 | 0.05 | 17.48 |
| Tc (s) | 0.46 | 9.64 | 0.40 | 8.71 | 0.69 | 14.61 |
| Tt (s) | 0.44 | 9.25 | 0.38 | 8.23 | 0.65 | 13.28 |
| Tcu (s) | 0.35 | 13.89 | 0.32 | 12.30 | 0.38 | 15.94 |
| Ttu (s) | 0.21 | 9.09 | 0.17 | 7.96 | 0.34 | 14.17 |
| Event Period | Asymmetric (Direct) | MPM | ||
|---|---|---|---|---|
| RMSE | RMSE | |||
| 1 | 0.04 | 0.79 | 0.11 | −0.72 |
| 2 | 0.34 | 0.75 | 0.06 | 0.76 |
| 3 | 0.42 | −0.02 | 0.22 | −0.58 |
| 4 | 1.52 | 0.24 | 0.58 | 0.13 |
| 5 | 57.9 | 0.26 | 9.49 | 0.36 |
| 6 | 0.22 | −0.5 | 0.11 | 0.2 |
| 7 | 0.2 | −0.6 | 0.26 | −0.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalra, T.S.; Suttles, S.E.; Sherwood, C.R.; Warner, J.C.; Aretxabaleta, A.L.; Leavitt, G.R. Shoaling Wave Shape Estimates from Field Observations and Derived Bedload Sediment Rates. J. Mar. Sci. Eng. 2022, 10, 223. https://doi.org/10.3390/jmse10020223
Kalra TS, Suttles SE, Sherwood CR, Warner JC, Aretxabaleta AL, Leavitt GR. Shoaling Wave Shape Estimates from Field Observations and Derived Bedload Sediment Rates. Journal of Marine Science and Engineering. 2022; 10(2):223. https://doi.org/10.3390/jmse10020223
Chicago/Turabian StyleKalra, Tarandeep S., Steve E. Suttles, Christopher R. Sherwood, John C. Warner, Alfredo L. Aretxabaleta, and Gibson R. Leavitt. 2022. "Shoaling Wave Shape Estimates from Field Observations and Derived Bedload Sediment Rates" Journal of Marine Science and Engineering 10, no. 2: 223. https://doi.org/10.3390/jmse10020223
APA StyleKalra, T. S., Suttles, S. E., Sherwood, C. R., Warner, J. C., Aretxabaleta, A. L., & Leavitt, G. R. (2022). Shoaling Wave Shape Estimates from Field Observations and Derived Bedload Sediment Rates. Journal of Marine Science and Engineering, 10(2), 223. https://doi.org/10.3390/jmse10020223