
Application of Radar Image Fusion Method to Near-Field Sea Ice Warning for Autonomous Ships in the Polar Region



Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Related Studies | Sensing Range | Sensing Equipment | Multi-Source Data | SIC 1 | SIA 2 | SIG 3 | Dist 4 | Relative Bearing | Visual Warning |
|---|---|---|---|---|---|---|---|---|---|
| Haverkamp et al. (1995) [19] | Large | Satellite (SAR) | X | X | O | O | X | X | X |
| Spreen et al. (2008) [11] | Large | Satellite (AMSR-E sensor) | X | O | O | X | X | X | O |
| Gu et al. (2013) [8] | Large | NOAA satellite | X | X | O | O | X | X | O |
| Beitsch et al. (2014) [12] | Large | Satellite (AMSR-2 sensor) | X | O | X | X | X | X | O |
| Posey et al. (2015) [13] | Large | Satellite (AMSR-2 and SSMIS sensors) | O | O | X | X | X | X | O |
| Hebert et al. (2015) [14] | Large | Satellite (AMSR-2 sensor) | O | O | X | X | X | X | O |
| Wang et al. (2016) [9] | Large | Satellite (SAR- RADARSAT-2) | X | O | X | X | X | X | O |
| Zeng et al. (2016) [10] | Large | Terra satellite (MODIS sensors) | X | O | X | O | X | X | O |
| Chi et al. (2017) [15] | Large | Satellite (passive microwave sensors) | X | O | X | X | X | X | O |
| Yan et al. (2019) [18] | Large | COMS satellite (GOCI) | X | X | O | O | X | X | O |
| Dumitru et al. (2019) [27] | Large | Sentinel-1 satellite (SAR) | X | X | O | O | X | X | O |
| Xiao et al. (2021) [16] | Large | CryoSat-2 satellite | X | X | X | O | X | X | O |
| Weissling et al. (2009) [20] | Small | Camera observation | X | X | O | O | X | X | O |
| Zhang and Skjetne. (2015) [21] | Small | Camera observation | X | X | O | O | X | X | O |
| Parmiggiani et al. (2019) [22] | Small | Camera observation | X | X | O | X | X | X | O |
| Renner et al. (2013) [23] | Medium | EM-bird sensor and camera observation | O | X | O | O | X | X | O |
| Hsieh et al. (2021) [26] | Medium | Marine radar | X | X | O | X | O | X | O |
| This study | Medium | Marine radar and ice radar | O | O | O | O | O | O | O |
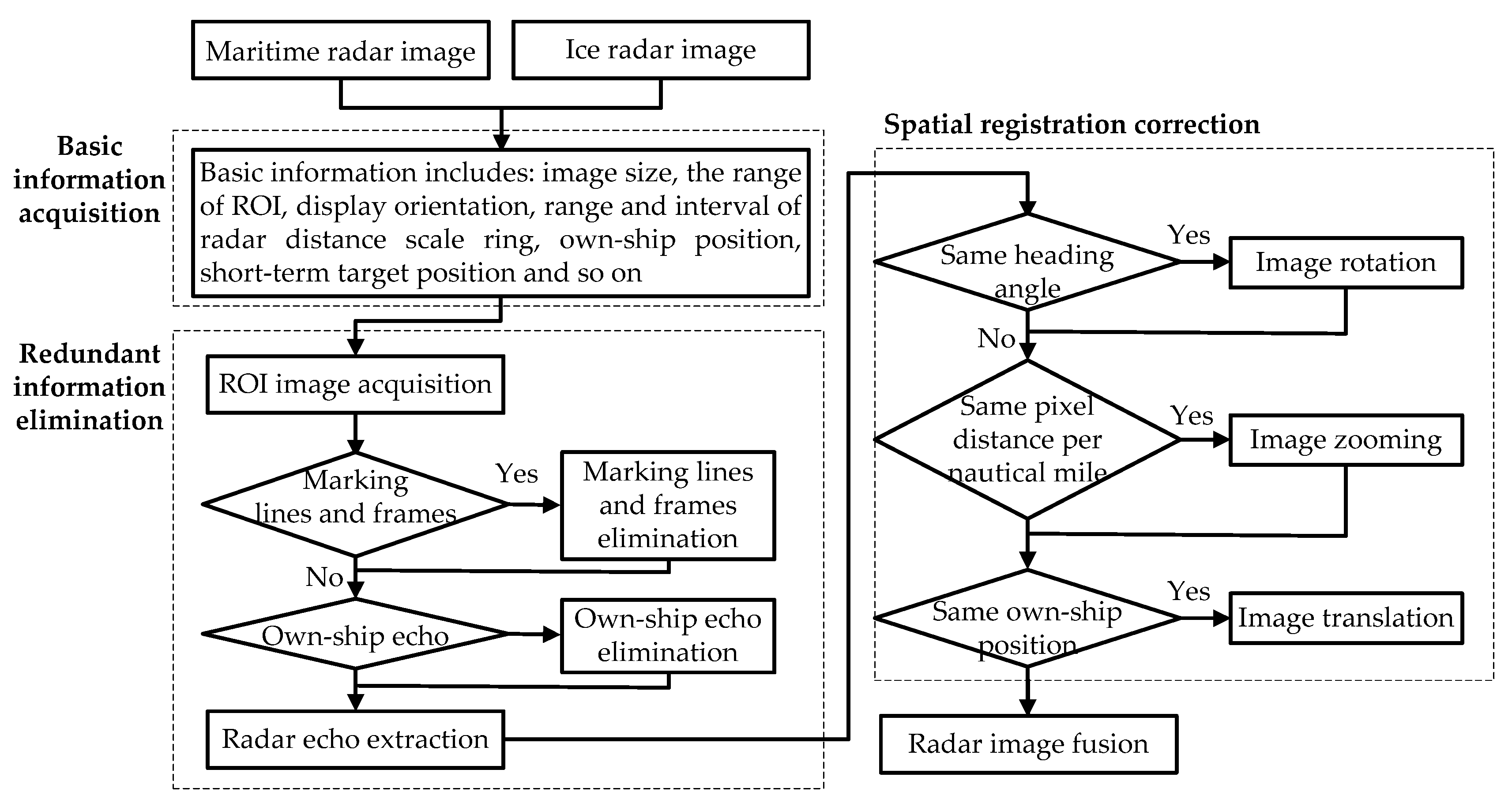
2. Radar Image Fusion Process
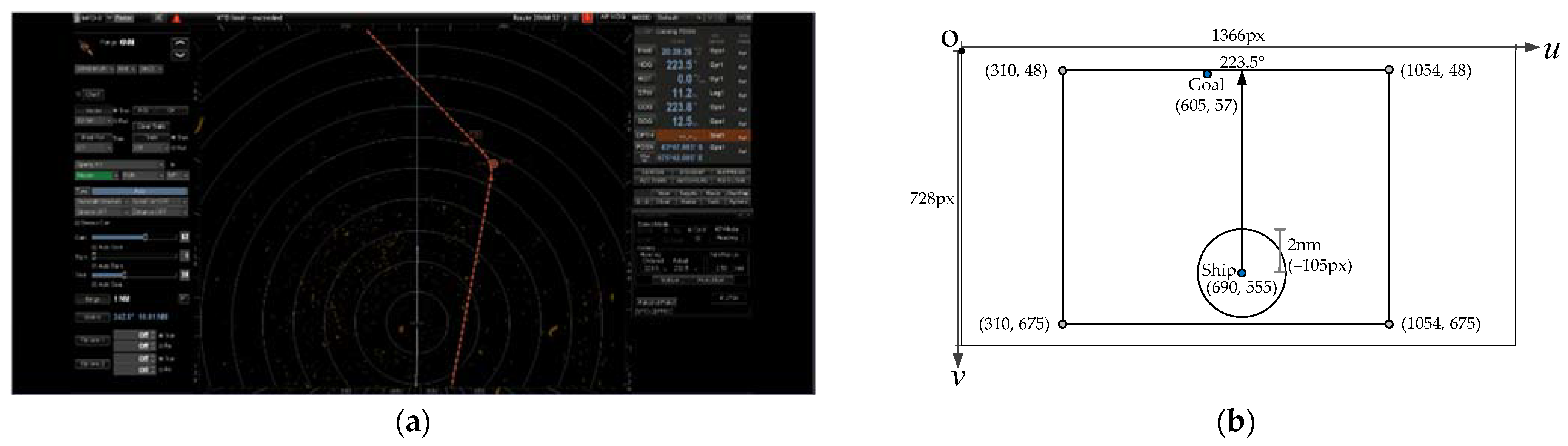
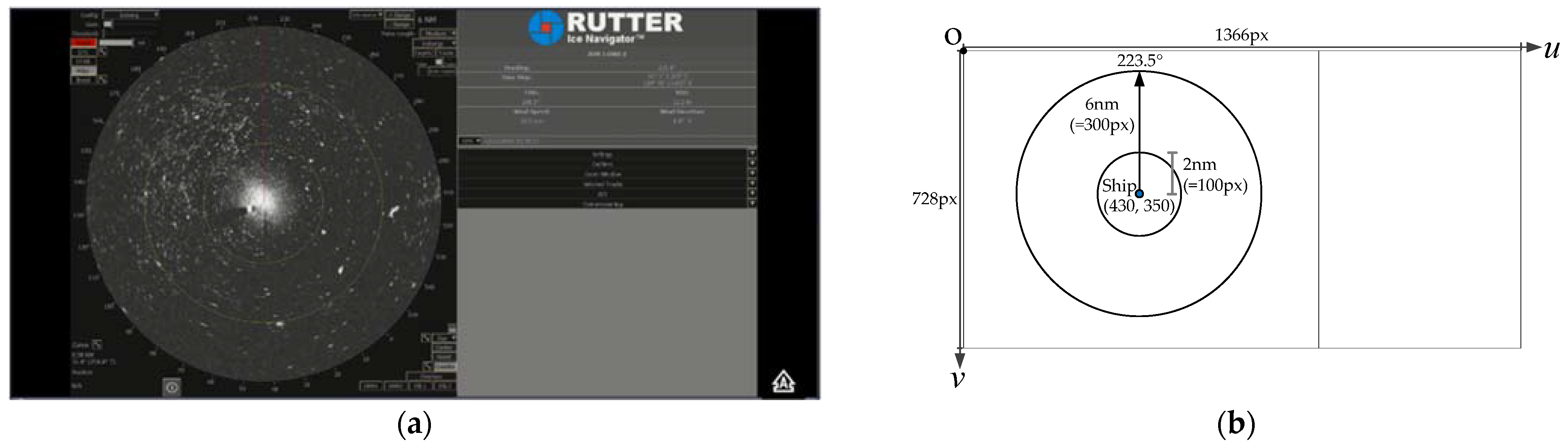
2.1. Radar Image Capture and Basic Information Acquisition
2.2. Redundant Information Elimination
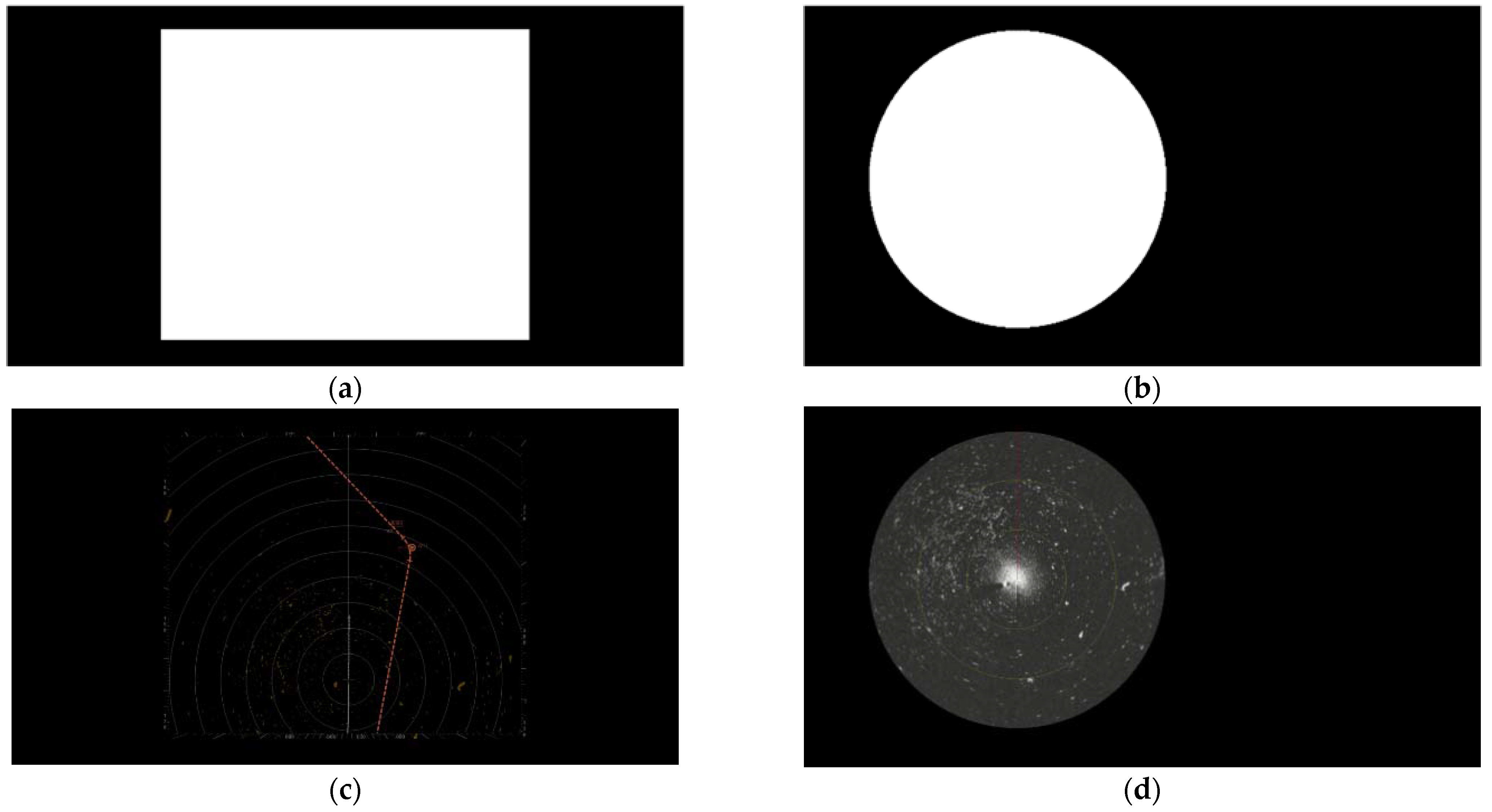
2.2.1. ROI Image Acquisition
2.2.2. Marking Lines and Frames Elimination
2.2.3. Own-Ship Echo Elimination
2.2.4. Radar Echo Extraction
2.3. Spatial Registration Correction
2.3.1. Image Rotation
2.3.2. Image Zooming
2.3.3. Image Translation
2.4. Radar Image Fusion
3. Near-Field Sea Ice Risk Assessment and Warning Process
3.1. Near-Field Sea Ice Risk Variables Calculation
3.1.1. Sea Ice Concentration
3.1.2. Sea Ice Area
3.1.3. Sea Ice Grayscale
3.1.4. Distance between Sea Ice and the Own-Ship
3.1.5. Relative Bearing of Sea Ice and the Own-Ship
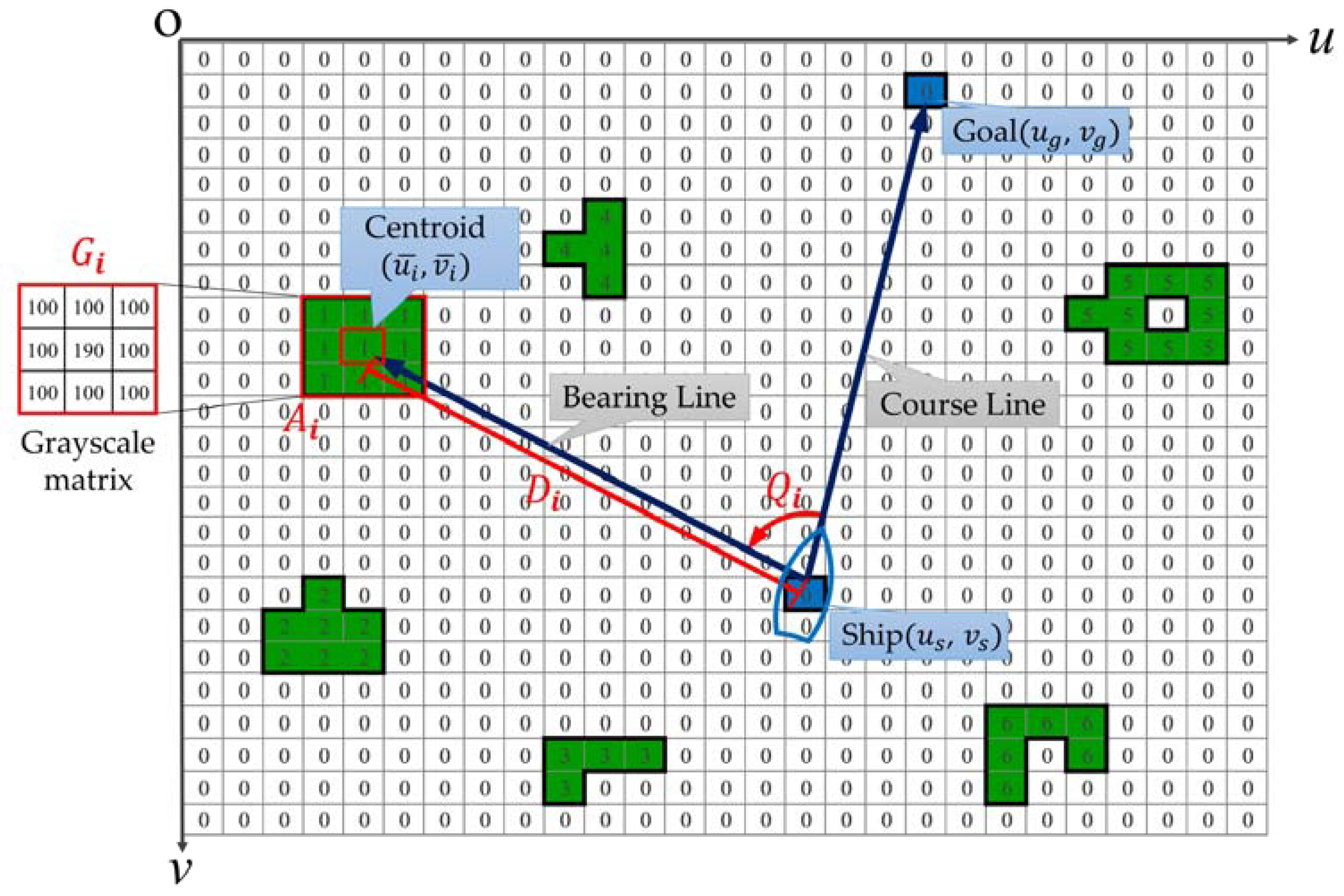
3.2. Nonpartition Sea Ice Risk Assessment Method for Low-Sea-Ice-Concentration Situation
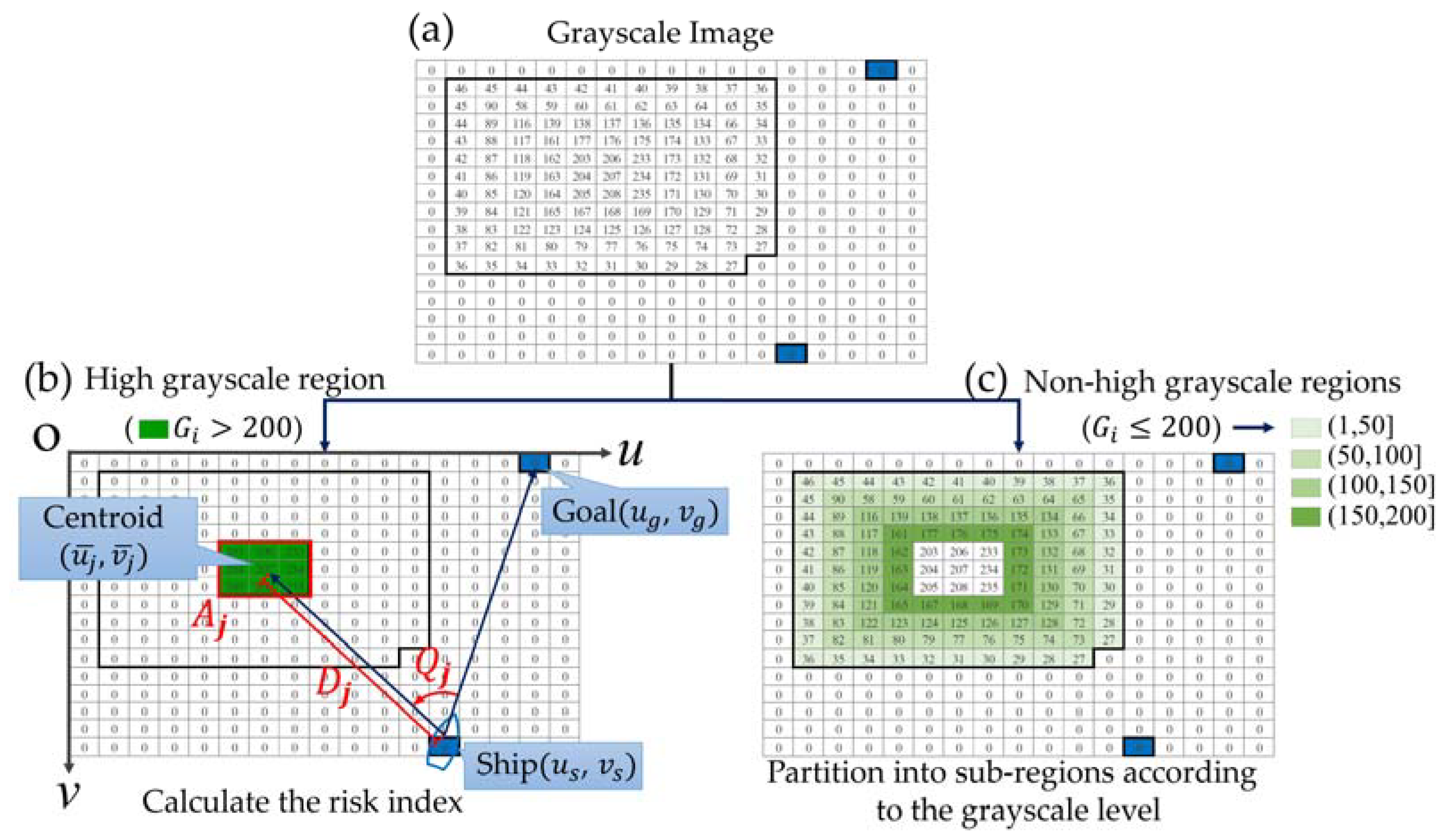
3.3. Partition Sea Ice Risk Assessment Method for High-Sea-Ice-Concentration Situation
4. Example Demonstration for Near-Field Sea Ice Perception and Warning
4.1. Example 1
4.2. Example 2
4.3. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stroeve, J.; Notz, D. Changing state of Arctic sea ice across all seasons. Environ. Res. Lett. 2018, 13, 10300110. [Google Scholar] [CrossRef]
- England, M.R.; Polvani, L.M.; Sun, L. Robust Arctic warming caused by projected Antarctic sea ice loss. Environ. Res. Lett. 2020, 15, 104005. [Google Scholar] [CrossRef]
- Yang, J.; Xiao, C.; Liu, J.; Li, S.; Qin, D. Variability of Antarctic sea ice extent over the past 200 years. Sci. Bull. 2021, 66, 2394–2404. [Google Scholar] [CrossRef]
- Guarino, M.V.; Sime, L.C.; Schröeder, D.; Irene, M.V.; Rosenblum, E.; Ringer, M.; Ridley, J.; Feltham, D.; Bitz, C.; Eric, J.S.; et al. Sea-ice-free Arctic during the last interglacial supports fast future loss. Nat Clim Chang. 2020, 10, 928–932. [Google Scholar] [CrossRef]
- Wright, R.G. Unmanned and Autonomous Ships—An Overview of Mass, 1st ed.; Routledge Taylor & Francis Group: New York, NY, USA, 2020; pp. 115–144. Available online: https://scholar.google.com/scholar?hl=zh-CN&as_sdt=0%2C5&q=Unmanned+and+autonomous+ships-An+Overview+of+MASS&btnG= (accessed on 9 March 2022).
- Tsou, M.C. Multi-target collision avoidance route planning under an ECDIS framework. Ocean Eng. 2016, 121, 268–278. [Google Scholar] [CrossRef]
- Skauen, A.N. Quantifying the tracking capability of space-based AIS systems. Adv. Space Res. 2016, 57, 527–542. [Google Scholar] [CrossRef] [Green Version]
- Gu, W.; Liu, C.; Yuan, S.; Li, N.; Chao, J.; Li, L.; Xu, Y. Spatial distribution characteristics of sea-ice-hazard risk in Bohai, China. Ann. Glaciol. 2013, 54, 73–79. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Xu, L.; Clausi, D.A. Sea ice concentration estimation during melt from dual-pol SAR scenes using deep convolutional neural networks: A case study. IEEE Trans. Geosci. Electron. 2016, 54, 4524–4533. [Google Scholar] [CrossRef]
- Zeng, T.; Shi, L.; Marko, M.; Cheng, B.; Zou, J.; Zhang, Z. Sea ice thickness analyses for the Bohai Sea using MODIS thermal infrared imagery. Acta Oceanol. Sin. 2016, 35, 96–104. [Google Scholar] [CrossRef]
- Spreen, G.; Kaleschke, L.; Heygster, G. Sea ice remote sensing using AMSR-E 89-GHz channels. J. Geophys. Res. 2008, 113, C02S03. [Google Scholar] [CrossRef] [Green Version]
- Beitsch, A.; Kaleschke, L.; Kern, S. Investigating high-resolution AMSR2 sea ice concentrations during the february 2013 fracture event in the Beaufort Sea. Remote Sens. 2014, 6, 3841–3856. [Google Scholar] [CrossRef] [Green Version]
- Posey, P.G.; Metzger, E.J.; Wallcraft, A.J.; Hebert, D.A.; Allard, R.A.; Smedstad, O.M.; Phelps, M.W.; Fetterer, F.; Stewart, J.S.; Meier, W.N.; et al. Improving Arctic sea ice edge forecasts by assimilating high horizontal resolution sea ice concentration data into the US Navy’s ice forecast systems. Cryosphere 2015, 9, 1735–1745. [Google Scholar] [CrossRef] [Green Version]
- Hebert, D.A.; Allard, R.A.; Metzger, E.J.; Posey, P.G.; Preller, R.H.; Wallcraft, A.J.; Phelps, M.W.; Smedstad, O.M. Short-term sea ice forecasting: An assessment of ice concentration and ice drift forecasts using the U.S. Navy’s Arctic Cap Nowcast/Forecast System. J. Geophys. Res. 2015, 120, 8327–8345. [Google Scholar] [CrossRef] [Green Version]
- Chi, J.; Kim, H. Prediction of Arctic sea ice concentration using a fully data driven deep neural network. Remote Sens. 2017, 9, 1305. [Google Scholar] [CrossRef] [Green Version]
- Xiao, F.; Zhang, S.; Li, J.; Geng, T.; Xuan, Y.; Li, F. Arctic sea ice thickness variations from CryoSat-2 satellite altimetry data. Sci. China Earth Sci. 2021, 64, 1080–1089. [Google Scholar] [CrossRef]
- Xu, Y.; Li, H.; Liu, B.; Xie, H.; Burcu, O.C. Deriving Antarctic sea-ice thickness from satellite altimetry and estimating consistency for NASA’s ICESat/ICESat-2 missions. Geophys. Res. Lett. 2021, 48, e2021GL093425. [Google Scholar] [CrossRef]
- Yan, Y.; Huang, K.; Shao, D.; Xu, Y.; Gu, W. Monitoring the characteristics of the Bohai sea ice using high-resolution geostationary ocean color imager (GOCI) data. Sustainability 2019, 11, 777. [Google Scholar] [CrossRef] [Green Version]
- Haverkamp, D.; Soh, L.K.; Tsatsoulis, C. A comprehensive, automated approach to determining sea ice thickness from SAR data. IEEE Trans. Geosci. Remote. Sens. 1995, 33, 46–57. [Google Scholar] [CrossRef] [Green Version]
- Weissling, B.; Ackley, S.; Wagner, P.; Xie, H. EISCAM—Digital image acquisition and processing for sea ice parameters from ships. Cold Reg. Sci. Technol. 2009, 57, 49–60. [Google Scholar] [CrossRef]
- Zhang, Q.; Skjetne, R. Image processing for identification of sea-ice floes and the floe size distributions. IEEE Trans. Geosci. Remote. Sens. 2015, 53, 2913–2924. [Google Scholar] [CrossRef]
- Parmiggiani, F.; Flores, M.M.; Wadhams, P.; Aulicino, G. Image processing for pancake ice detection and size distribution computation. Int. J. Remote Sens. 2019, 40, 3368–3383. [Google Scholar] [CrossRef]
- Renner, A.H.H.; Dumont, M.; Beckers, J.; Gerland, S.; Haas, H. Improved characterisation of sea ice using simultaneous aerial photography and sea ice thickness measurements. Cold Reg. Sci. Technol. 2013, 92, 37–47. [Google Scholar] [CrossRef]
- Xu, J.; Wang, H.; Cui, C.; Liu, P.; Zhao, Y.; Li, B. Oil spill segmentation in ship-borne radar images with an improved active contour model. Remote Sens. 2019, 11, 1698. [Google Scholar] [CrossRef] [Green Version]
- IMO. International Code for Ships Operating in Polar Waters (Polar Code); IMO: London, UK, 2015; Available online: https://wwwcdn.imo.org/localresources/en/MediaCentre/HotTopics/Documents/POLAR%20CODE%20TEXT%20AS%20ADOPTED.pdf (accessed on 9 March 2022).
- Hsieh, T.H.; Wang, S.; Gong, H.; Liu, W.; Xu, N. Sea ice warning visualization and path planning for ice navigation based on radar image recognition. J. Mar. Sci. Technol. 2021, 29, 280–290. [Google Scholar] [CrossRef]
- Dumitru, C.O.; Andrei, V.; Schwarz, G.; Datcu, M. Machine Learning for Sea Ice Monitoring from Satellites. In Proceedings of the Photogrammetric Image Analysis & Munich Remote Sensing Symposium, Munich, Germany, 18–20 September 2019; pp. 83–89. [Google Scholar] [CrossRef] [Green Version]
- Allison, I.; Brandt, R.E.; Warren, S.G. East Antarctic sea ice: Albedo, thickness distribution, and snow cover. J. Geophys. Res. 1993, 98, 12417–12429. [Google Scholar] [CrossRef]
- Su, H.; Wang, Y. Using MODIS data to estimate sea ice thickness in the Bohai Sea (China) in the 2009–2010 winter. J. Geophys. Res. 2012, 117, C10018. [Google Scholar] [CrossRef]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsieh, T.-H.; Li, B.; Wang, S.; Liu, W. Application of Radar Image Fusion Method to Near-Field Sea Ice Warning for Autonomous Ships in the Polar Region. J. Mar. Sci. Eng. 2022, 10, 421. https://doi.org/10.3390/jmse10030421
Hsieh T-H, Li B, Wang S, Liu W. Application of Radar Image Fusion Method to Near-Field Sea Ice Warning for Autonomous Ships in the Polar Region. Journal of Marine Science and Engineering. 2022; 10(3):421. https://doi.org/10.3390/jmse10030421
Chicago/Turabian StyleHsieh, Tsung-Hsuan, Bo Li, Shengzheng Wang, and Wei Liu. 2022. "Application of Radar Image Fusion Method to Near-Field Sea Ice Warning for Autonomous Ships in the Polar Region" Journal of Marine Science and Engineering 10, no. 3: 421. https://doi.org/10.3390/jmse10030421
APA StyleHsieh, T. -H., Li, B., Wang, S., & Liu, W. (2022). Application of Radar Image Fusion Method to Near-Field Sea Ice Warning for Autonomous Ships in the Polar Region. Journal of Marine Science and Engineering, 10(3), 421. https://doi.org/10.3390/jmse10030421