
Mechanical Reliability Analysis of Flexible Power Cables for Marine Energy




Abstract
:1. Introduction
2. Methodology
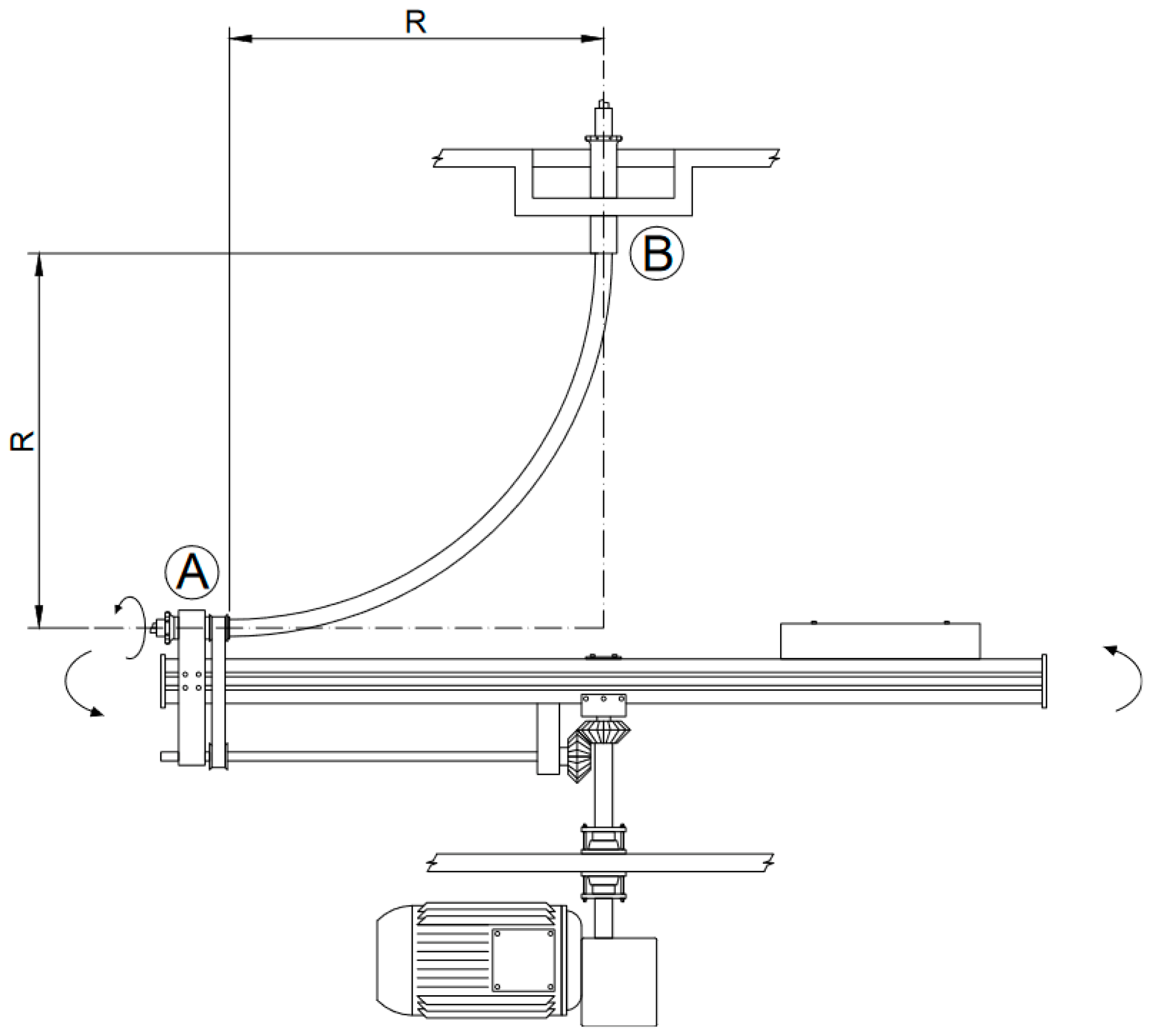
2.1. Full-Scale Measurements on WaveEL 3.0 and Power Cable Fatigue Tests
2.2. Numerical Simulation of Cable Motion
2.3. Fatigue Life Model
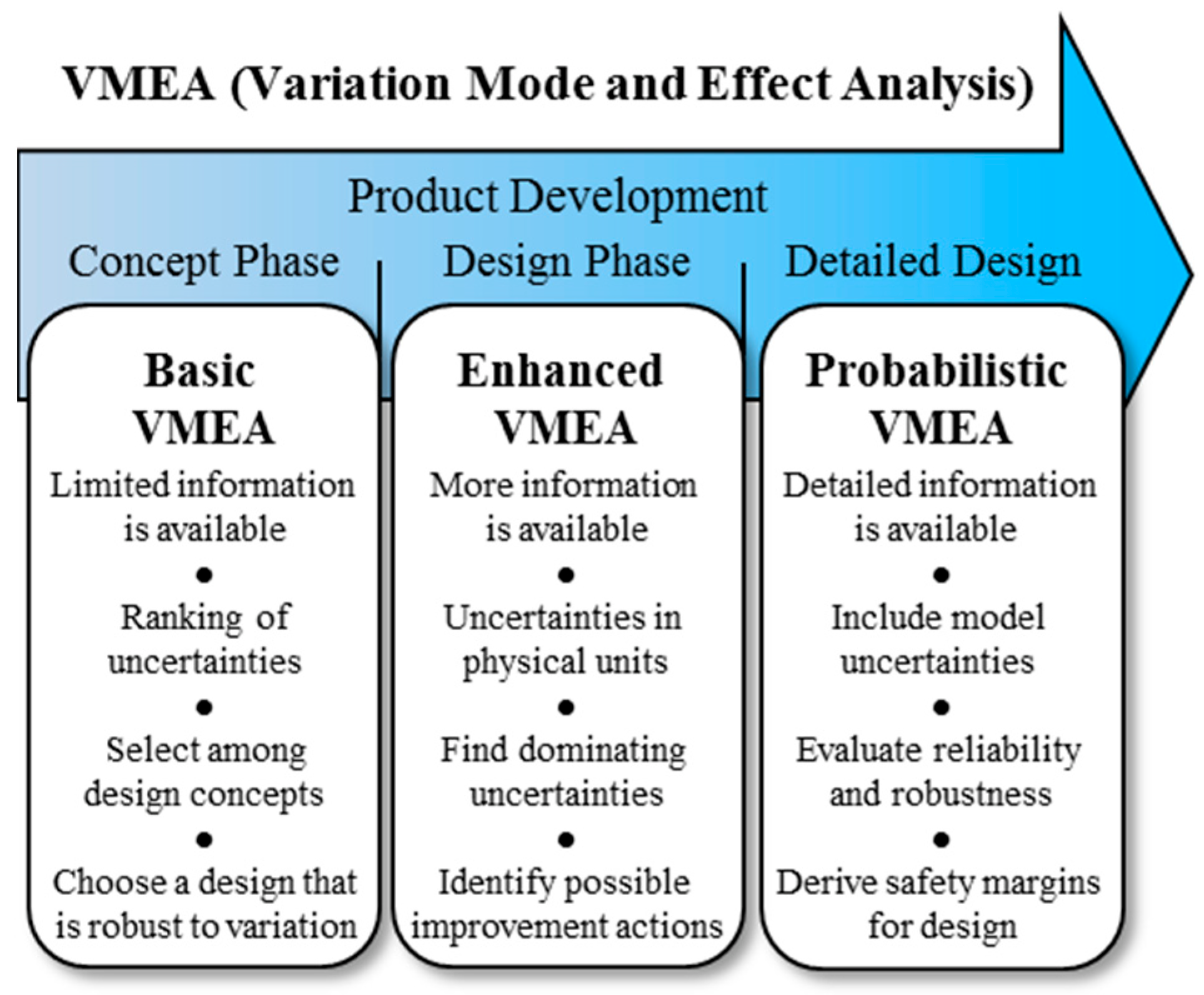
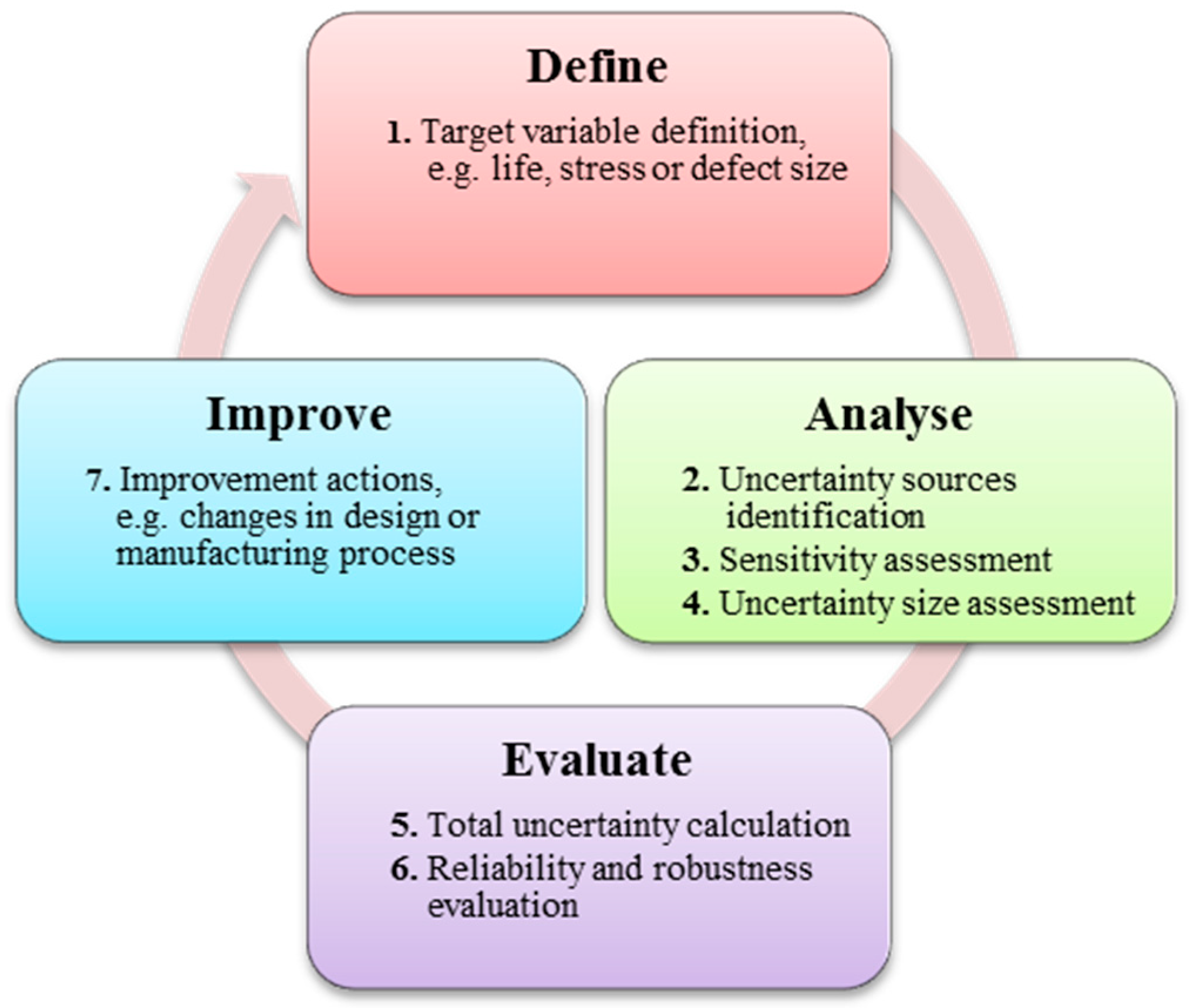
2.4. Variation Mode and Effect Analysis
3. Results
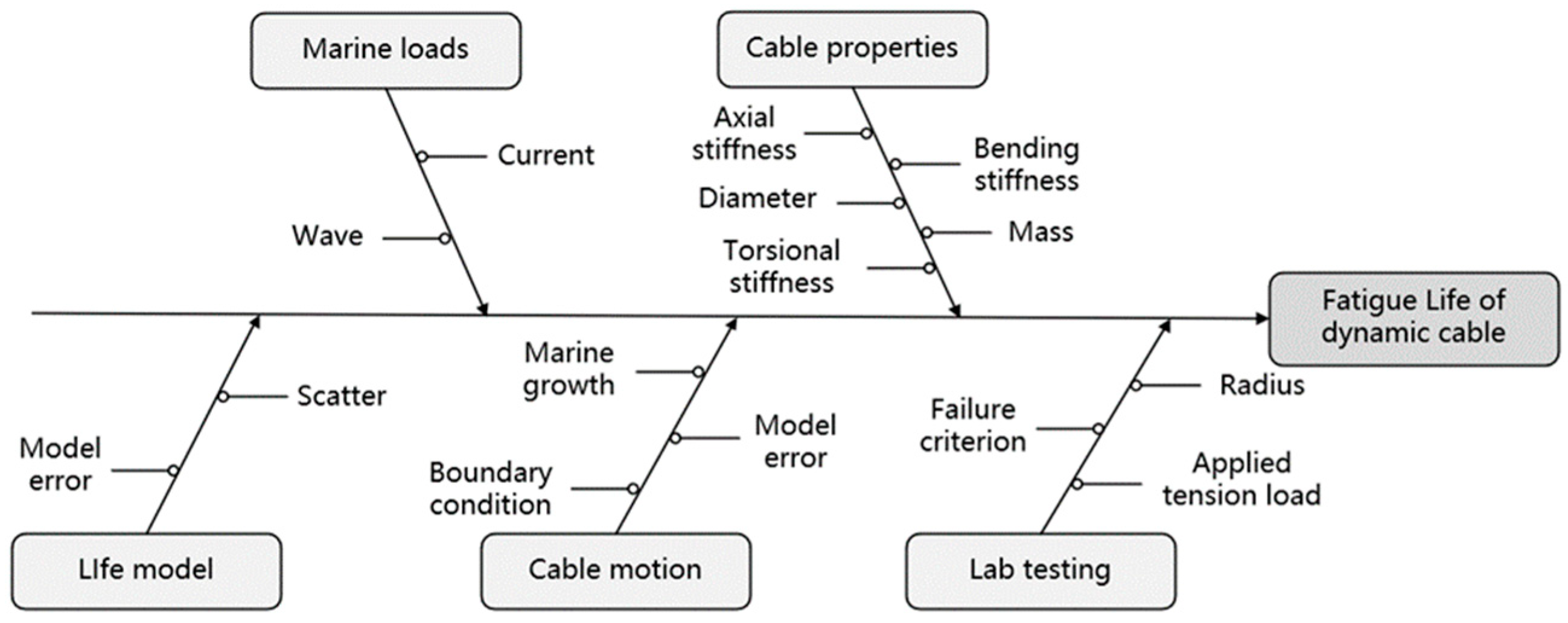
3.1. Target Variable and Sources of Uncertainties
3.2. Equivalent Load and Strength Variables
3.3. Evaluation of Sensitivities and Uncertainty Sizes
3.3.1. Marine Loads
3.3.2. Cable Motion
3.3.3. Cable Properties
3.3.4. Life Model
3.3.5. Laboratory Testing
3.4. Probabilistic VMEA Table
3.5. Reliability Evaluation
4. Discussion of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Result | ||||
|---|---|---|---|---|---|
| Uncertainty Components | Sensitivity | Uncertainty | Resulting Uncertainty | Variation Contribution | |
| Variance/ | Proportion | ||||
| Marine Loads | |||||
| Wave climate at site (Runde) | −1.31 | 5.8% | 7.6% | 57 | 15% |
| Ocean currents at site (Runde) | −0.67 | 5.8% | 3.9% | 15 | 4% |
| Total Marine Loads | 8.5% | 72 | 19% | ||
| Cable Motion | |||||
| Cable boundary conditions | −1.00 | 2.9% | 2.9% | 8 | 2% |
| Cable model error | −1.00 | 5.8% | 5.8% | 33 | 9% |
| Marine growth | −1.00 | 10.5% | 10.5% | 110 | 29% |
| Total Cable Motion | 12.3% | 152 | 40% | ||
| Cable Properties | |||||
| Diameter, within batch variation | 0.00 | 0.3% | 0.0% | 0 | 0% |
| Diameter, batch variation | 0.00 | 0.7% | 0.0% | 0 | 0% |
| Diameter, non-spherical | 0.00 | 2.2% | 0.0% | 0 | 0% |
| Axial stiffness, EA | 0.01 | 8.1% | 0.1% | 0 | 0% |
| Bending stiffness, EI | −0.03 | 12.2% | 0.4% | 0 | 0% |
| Torsional stiffness, GKv | 0.01 | 4.4% | 0.0% | 0 | 0% |
| Mass [kg/m] | −1.52 | 1.2% | 1.8% | 3 | 1% |
| Total Cable Properties | 1.8% | 3 | 1% | ||
| Life Model | |||||
| Fatigue life scatter | 1 | 8.4% | 8.4% | 70 | 18% |
| Fatigue life estimation | 1 | 3.7% | 3.7% | 14 | 4% |
| Fatigue life model error | 0.16 | 40.0% | 6.4% | 41 | 11% |
| Total Life Model | 12.9% | 125 | 33% | ||
| Laboratory testing | |||||
| Bending radius of cable [mm] | −1.00 | 5.0% | 5.0% | 25 | 7% |
| Total Laboratory Testing | 5.0% | 25 | 7% | ||
| Total Uncertainty | 19.4% | 377 | 100% | ||
References
- Worzyk, T. Application of submarine power cable. In Submarine Power Cables: Design, Installation, Repair, Environmental Aspects, 1st ed.; Springer: Berlin, Germany, 2009; pp. 1–7. ISBN 978-3-642-01269-3. [Google Scholar]
- DNV GL. Offshore Wind Industry Joins Forces to Reduce Costs of Cable Failures. 2018. Available online: https://www.dnvgl.com/news/offshore-wind-industry-joins-forces-toreduce-costs-of-cable-failures-117811 (accessed on 18 May 2022).
- Offshore Wind Programme Board. Offshore Wind Programme Board. Export Cable Reliability Description of Concerns. Technical Report. July 2017. Available online: https://ore.catapult.org.uk/app/uploads/2018/02/Export-Cable-Reliability-Step-1-v7-UPDATE-Jul-17.pdf (accessed on 18 May 2022).
- 4COffshore. Joint Industry Project Looks to Reduce Cable Failures. 2018. Available online: https://www.4coffshore.com/news/joint-industry-project-looks-to-reduce-cable-failuresnid7457.html (accessed on 18 May 2022).
- Marazzato, H.; Barber, K.; Jansen, M.; Graeme, B. Cable Condition Monitoring to Improve Reliability. 2004. Available online: https://www.nexans.co.nz/NewZealand/2012/22_1.04.2004%20-%20Cable%20Condition%20Monitoring.pdf (accessed on 18 May 2022).
- Hammons, T.J.; Woodford, D.; Loughtan, J.; Chamia, M.; Donahoe, J.; Povh, D.; Bisewski, B.; Long, W. Role of HVDC transmission in future energy development. IEEE Power Engng. Rev. 2000, 20, 10–25. [Google Scholar] [CrossRef]
- Folley, M.; Whittaker, T.J.T. The effect of sub-optimal control and the spectral wave climate on the performance of wave energy converter arrays. Appl. Ocean Res. 2009, 31, 260–266. [Google Scholar] [CrossRef]
- Nasution, F.P.; Sævik, S.; Gjøsteen, J.K.Ø.; Berg, S. Experimental and finite element analysis of fatigue performance of copper power conductors. Int. J. Fatigue 2013, 47, 244–258. [Google Scholar] [CrossRef]
- Thies, P.R.; Johanning, L.; Smith, G.H. Assessing mechanical loading regimes and fatigue life of marine power cables in marine energy application. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2011, 226, 18–32. [Google Scholar] [CrossRef] [Green Version]
- Trarieux, F.; Lyons, G.J.; Patel, M.H. Investigation with bandwidth measure for fatigue assessment of the Foinaven dynamic umbilical including VIV. Engng. Struct. 2006, 28, 1671–1690. [Google Scholar] [CrossRef] [Green Version]
- Stamatis, D.H. Failure Mode and Effect Analysis: FMEA from Theory to Execution, 2nd ed.; American Society for Quality, Quality Press: Milwaukee, WI, USA, 2003; pp. 21–81. ISBN 0-87389-598-3. [Google Scholar]
- Davis, T.P. Science, engineering and statistics. Appl. Stoch. Models Bus Ind. 2006, 22, 401–430. [Google Scholar] [CrossRef]
- Chakhunashvili, A.; Johansson, P.; Bergman, B. Variation mode and effect analysis. In Proceedings of the Annual Reliability and Maintainability Symposium, Los Angeles, CA, USA, 26–29 January 2004. [Google Scholar]
- Johansson, P.; Chakhunashvili, A.; Barone, S.; Bergman, B. Variation mode and effect analysis: A practical tool for quality improvement. Qual. Reliab. Engng. Int. 2006, 22, 865–876. [Google Scholar] [CrossRef]
- Chakhunashvili, A.; Barone, S.; Johansson, P.; Bergman, B. Robust product development using variation mode and effect analysis. In Robust Design Methodology for Reliability: Exploring the Effects of Variation and Uncertainty, 1st ed.; Bergman, B., de Mare, J., Loren, S., Svensson, T., Eds.; John Wiley & Sons Ltd.: West Sussex, UK, 2009; pp. 57–70. ISBN 978-0-470-71394-5. [Google Scholar]
- Johansson, P.; Svensson, T.; Samuelsson, L.; Bergman, B.; de Mare, J. Variation mode and effect analysis: An application to fatigue life prediction. Qual. Reliab. Engng. Int. 2009, 25, 167–179. [Google Scholar] [CrossRef]
- Svensson, T.; de Mare, J.; Johansson, P. Predictive safety index for variable amplitude fatigue life. In Robust Design Methodology for Reliability: Exploring the Effects of Variation and Uncertainty, 1st ed.; Bergman, B., de Mare, J., Loren, S., Svensson, T., Eds.; John Wiley & Sons Ltd.: West Sussex, UK, 2009; pp. 85–96. ISBN 978-0-470-71394-5. [Google Scholar]
- Bergman, B.; de Mare, J.; Loren, S.; Svensson, T. (Eds.) Robust Design Methodology for Reliability: Exploring the Effects of Variation and Uncertainty, 1st ed.; John Wiley & Sons Ltd.: West Sussex, UK, 2009; ISBN 978-0-470-71394-5. [Google Scholar]
- Johannesson, P, P.; Speckert, M. (Eds.) Guide to Load Analysis for Durability in Vehicle Engineering, 1st ed.; John Wiley & Sons Ltd.: West Sussex, UK, 2013; ISBN 978-1-118-64831-5. [Google Scholar]
- Svensson, T.; Johannesson, P. Reliability fatigue design, by rigid rules, by magic or by enlightened engineering. Procedia Eng. 2013, 66, 12–25. [Google Scholar] [CrossRef] [Green Version]
- Johannesson, P.; Bergman, B.; Svensson, T.; Arvidsson, M.; Lönnqvist, Å.; Barone, S.; de Maré, J. A robustness approach to reliability. Qual. Reliab. Engng. Int. 2013, 29, 17–32. [Google Scholar] [CrossRef]
- Johannesson, P. (Ed.) Reliability Guidance for Marine Energy Converters. Report RiaSoR (Reliability in a Sea of Risk). December 2016. Available online: http://riasor.com/wp-content/uploads/2016/12/ReliabilityGuidanceMECs_v1.0_20161216.pdf (accessed on 18 May 2022).
- Jia, C.; Ng, C.; McKeever, P.; Johannesson, P.; Svensson, T.; Buck, E.; Shanks, A. Improving reliability in a sea of risk. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Johannesson, P.; Svensson, T.; Gaviglio, H. Reliability evaluation using variation mode and effect analysis: Application to CorPower’s mooring pre-tension cylinder. In Proceedings of the 13th European Wave and Tidal Energy Conference, Napoli, Italy, 1–6 September 2019. [Google Scholar]
- Yang, S.-H.; Ringsberg, J.W.; Johnson, E.; Hu, Z.Q.; Duan, F.; Bergdahl, L. Experimental and numerical investigation of a taut-moored wave energy converter—A validation of simulated buoy motions. Proc. Inst. Mech. Eng. Part M J. Engng. Marit. Env. 2018, 232, 97–115. [Google Scholar] [CrossRef]
- Yang, S.-H.; Ringsberg, J.W.; Johnson, E. Parametric study of the dynamic motions and mechanical characteristics of power cables for wave energy converters. J. Mar. Sci. Technol. 2018, 23, 10–29. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.-H.; Ringsberg, J.W.; Johnson, E.; Hu, Z.Q. Experimental and numerical investigation of a taut-moored wave energy converter: A validation of simulated mooring line forces. Ships Offshore Struct. 2021, 15 (Suppl. 1), S55–S69. [Google Scholar] [CrossRef]
- Ringsberg, J.W.; Yang, S.-H.; Lang, X.; Johnson, E.; Kamf, J. Mooring forces in a floating point-absorbing WEC system—A comparison between full-scale measurements and numerical simulations. Ships Offshore Struct. 2021, 15 (Suppl. 1), S70–S81. [Google Scholar] [CrossRef] [Green Version]
- Kuznecovs, A.; Ringsberg, J.W.; Yang, S.-H.; Johnson, E. A methodology for design and fatigue analysis of power cables for wave energy converters. Int. J. Fatigue 2019, 122, 61–71. [Google Scholar] [CrossRef]
- DNV GL. Subsea Power Cables in Shallow Water, DNVGL-RP-0360; Det Norske Veritas (DNV): Høvik, Norway, 2016. [Google Scholar]
- DNV GL. Sesam SIMA V3.4-00; Det Norske Veritas (DNV): Høvik, Norway, 2017. [Google Scholar]
- Ishikawa, K.; Loftus, J. Introduction to Quality Control; 3A Corporation: Tokyo, Japan, 1990. [Google Scholar]
- Lang, X.; Yang, S.-H.; Ringsberg, J.W.; Johnson, E.; Guedes Soares, C.; Rahm, M. Comparison between full-scale measurements and numerical simulations of mooring forces in a floating point-absorber WEC system. In Proceedings of the 3rd International Conference on Renewable Energies Offshore, Lisbon, Portugal, 8–10 October 2018; pp. 865–876. [Google Scholar]
- Hindrum, K.; Hüffmeier, J. R&D of Dynamic Low Voltage Cables between the Buoy and Floating Hub in a Marine Energy System; Report; Swedish Energy Agency: Eskilstuna, Sweden, 2018. [Google Scholar]
- O’Connor, P.; Kleyner, A. Practical Reliability Engineering, 5th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Johannesson, P.; Lang, X.; Johnson, E.; Ringsberg, J.W. Mechanical Reliability Analysis of Flexible Power Cables for Marine Energy. J. Mar. Sci. Eng. 2022, 10, 716. https://doi.org/10.3390/jmse10060716
Johannesson P, Lang X, Johnson E, Ringsberg JW. Mechanical Reliability Analysis of Flexible Power Cables for Marine Energy. Journal of Marine Science and Engineering. 2022; 10(6):716. https://doi.org/10.3390/jmse10060716
Chicago/Turabian StyleJohannesson, Pär, Xiao Lang, Erland Johnson, and Jonas W. Ringsberg. 2022. "Mechanical Reliability Analysis of Flexible Power Cables for Marine Energy" Journal of Marine Science and Engineering 10, no. 6: 716. https://doi.org/10.3390/jmse10060716
APA StyleJohannesson, P., Lang, X., Johnson, E., & Ringsberg, J. W. (2022). Mechanical Reliability Analysis of Flexible Power Cables for Marine Energy. Journal of Marine Science and Engineering, 10(6), 716. https://doi.org/10.3390/jmse10060716