
Study on Sloshing Characteristics in a Liquid Cargo Tank under Combination Excitation

Abstract
:1. Introduction
2. Numerical Model and Experimental Platform
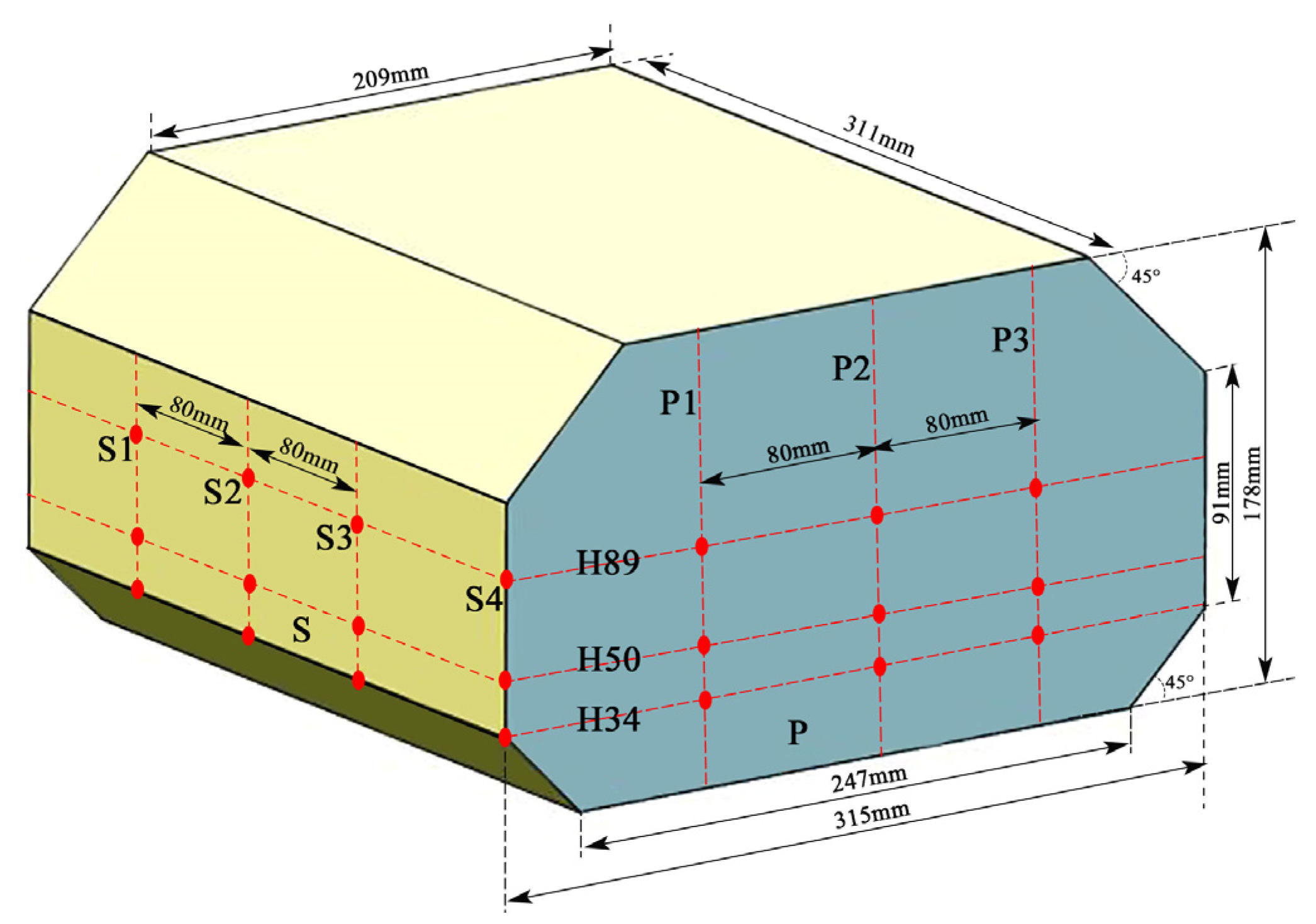
2.1. Geometric Model
2.2. Numerical Model
2.2.1. Volume Fraction Equation
2.2.2. Momentum Equation
2.2.3. Transport Equations for the Standard k-ε Model
2.3. Six-Degrees-of-Freedom Motion Experimental Platform
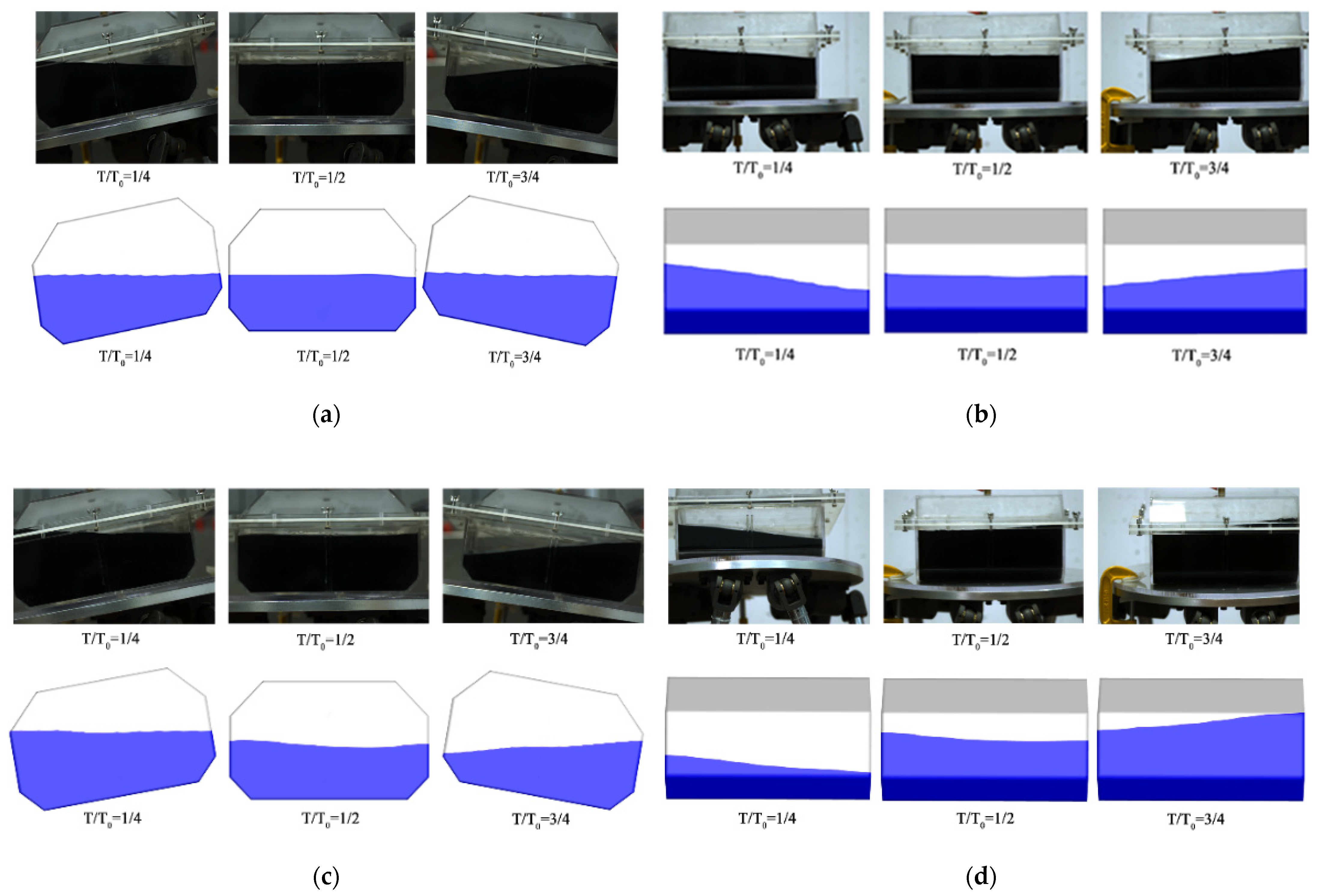
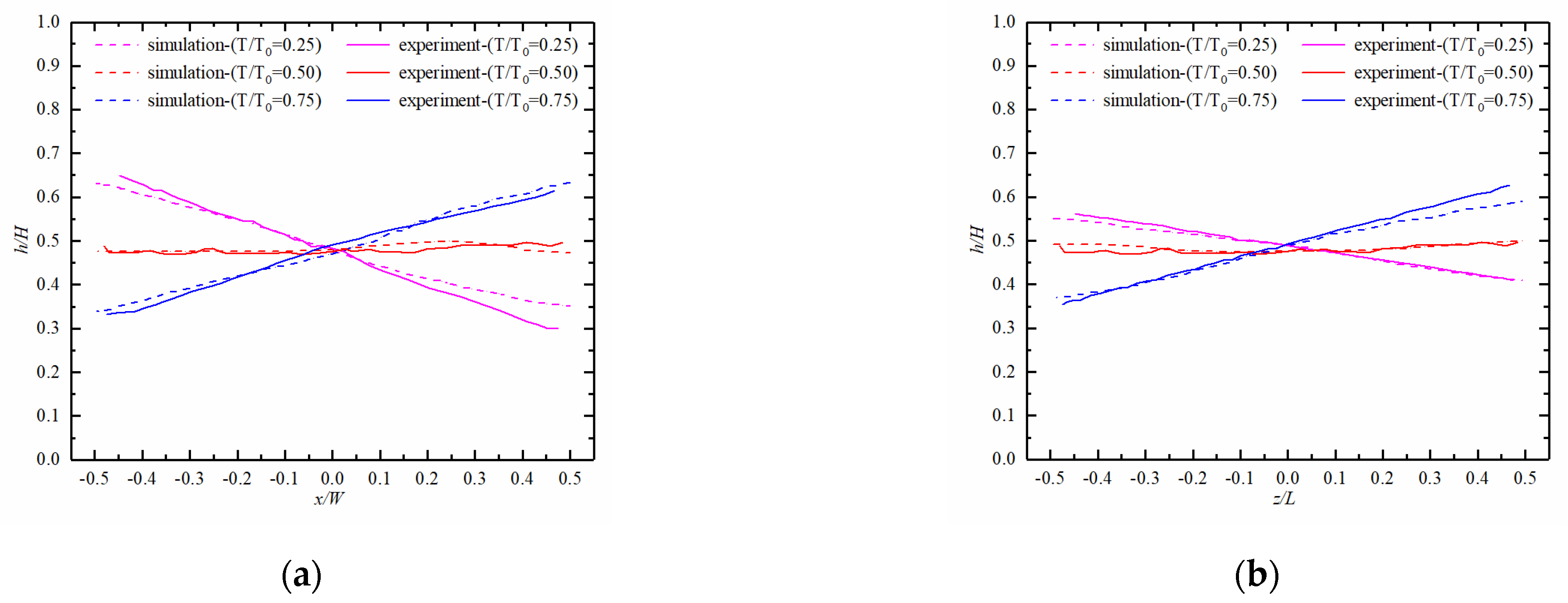
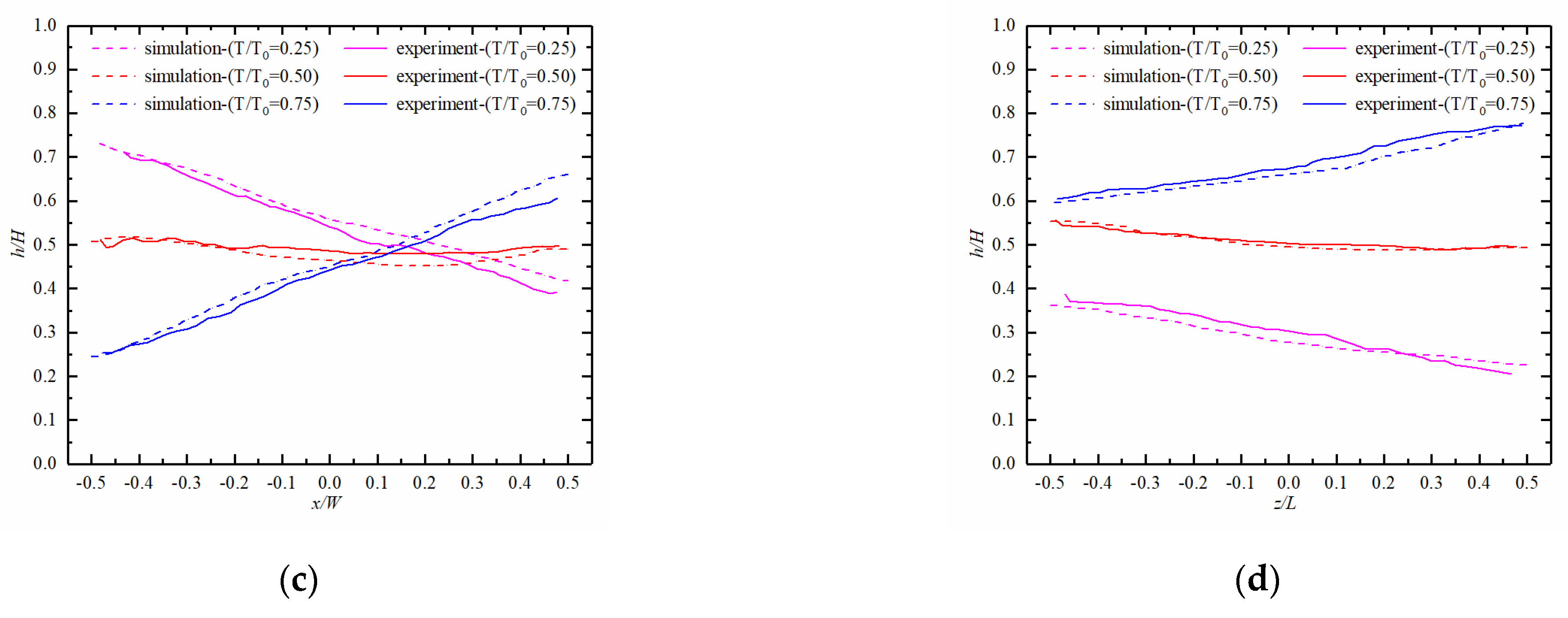
3. Model Validation
4. Results and Discussion
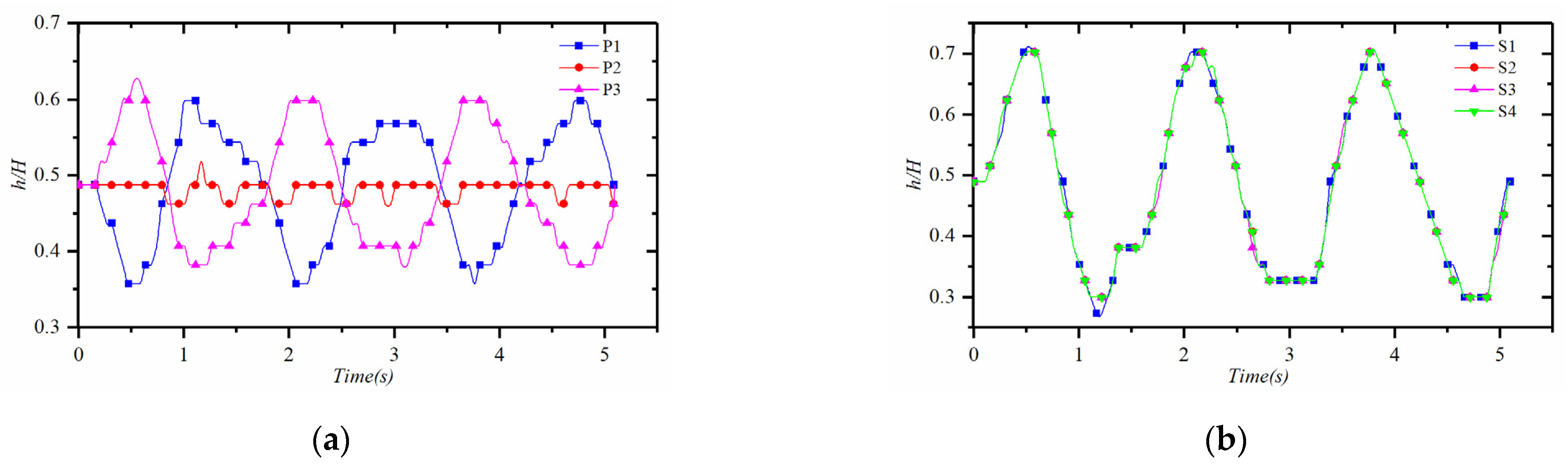
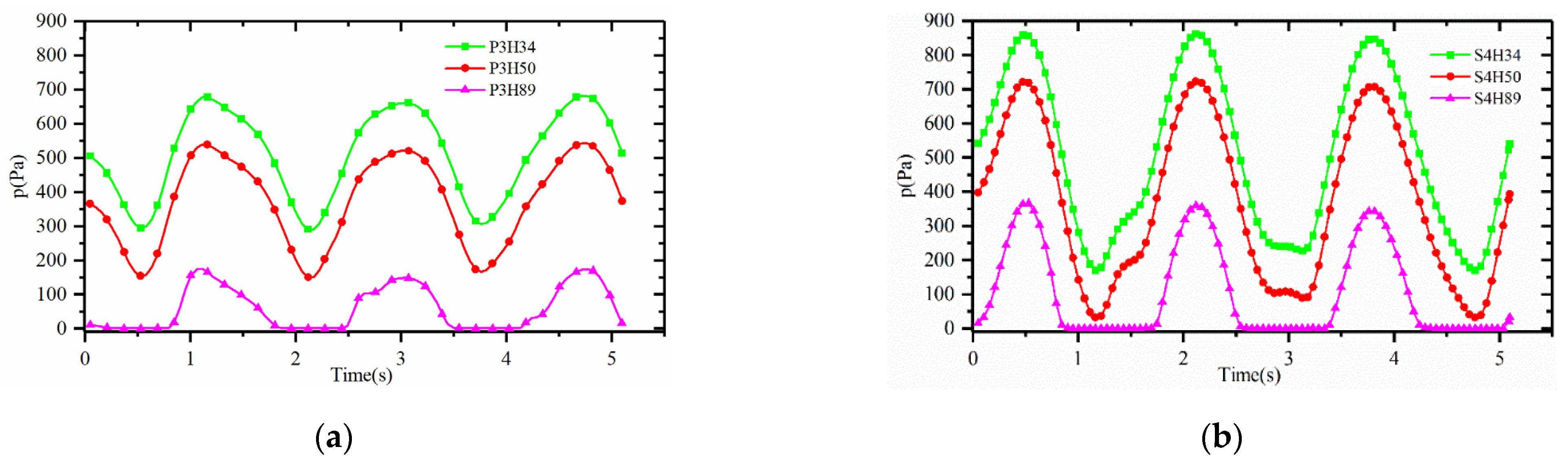
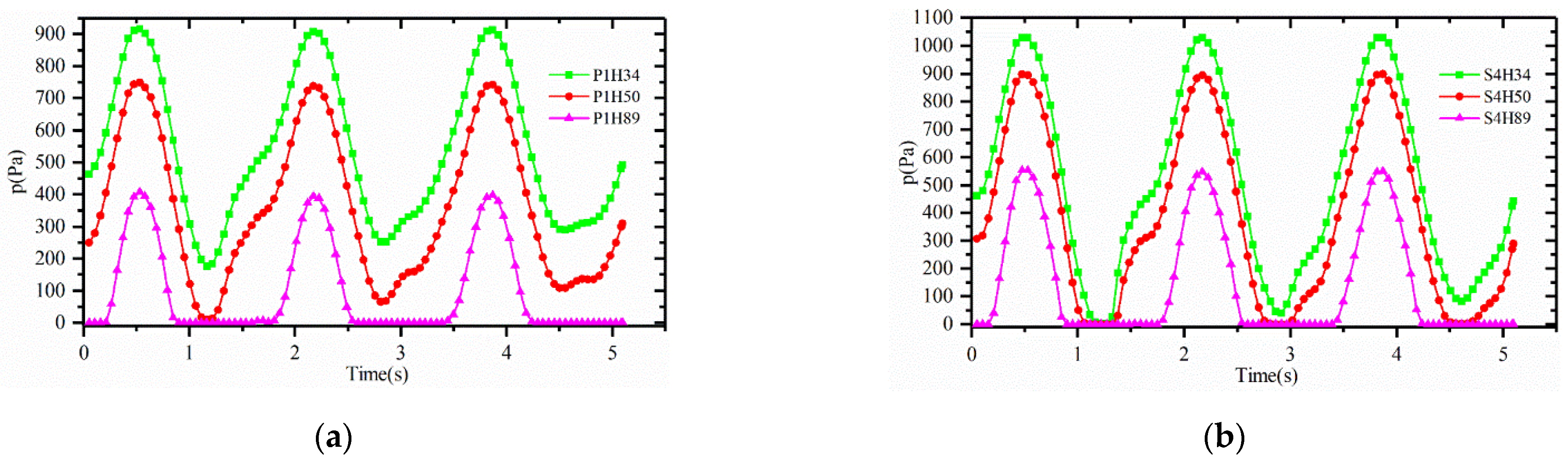
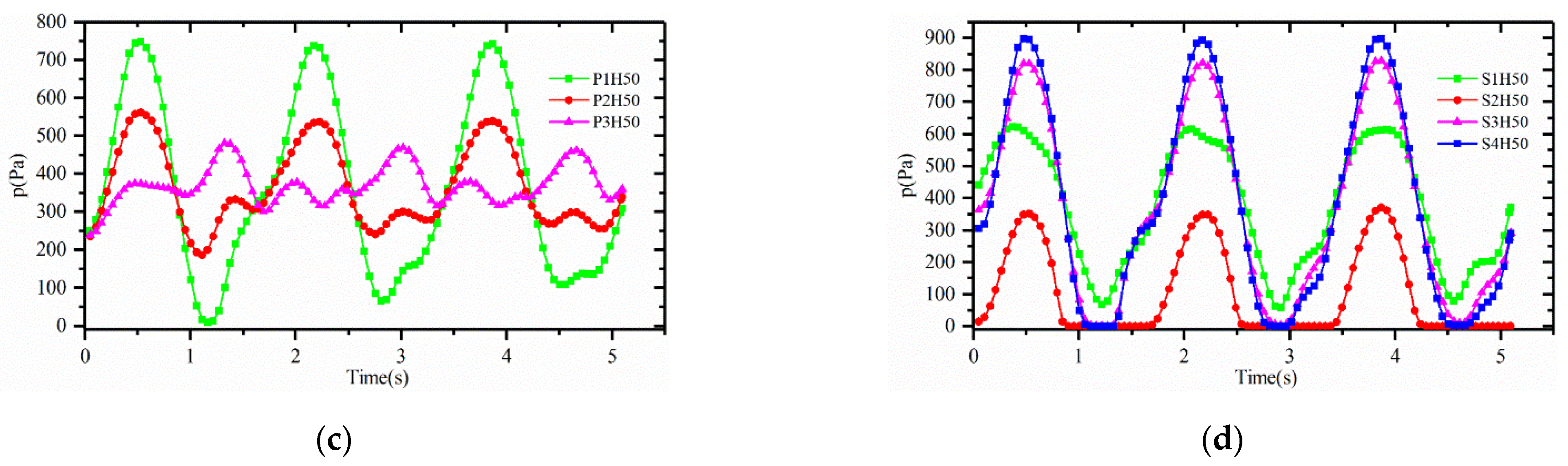
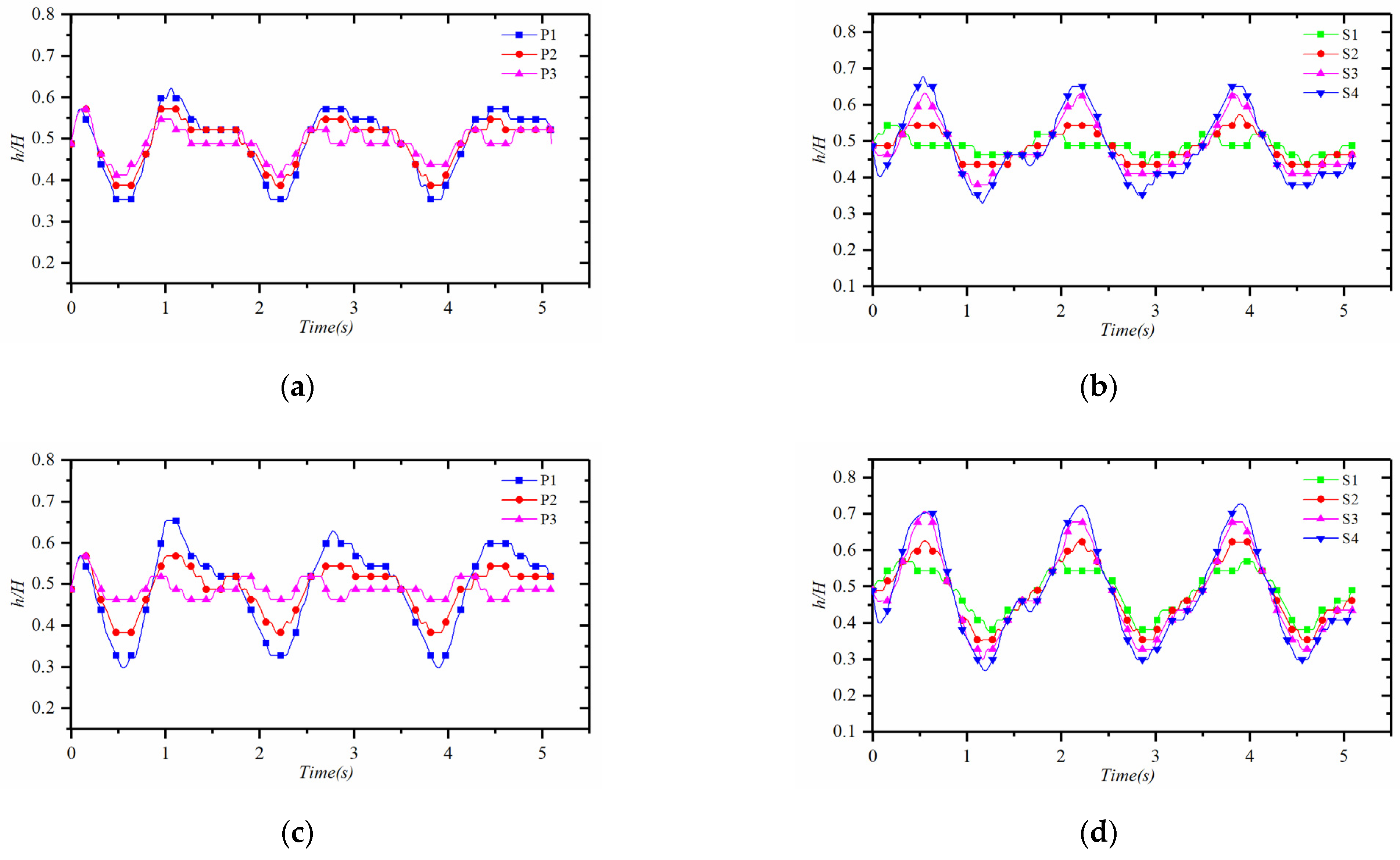
4.1. Liquid Sloshing Characteristics under Roll Excitation
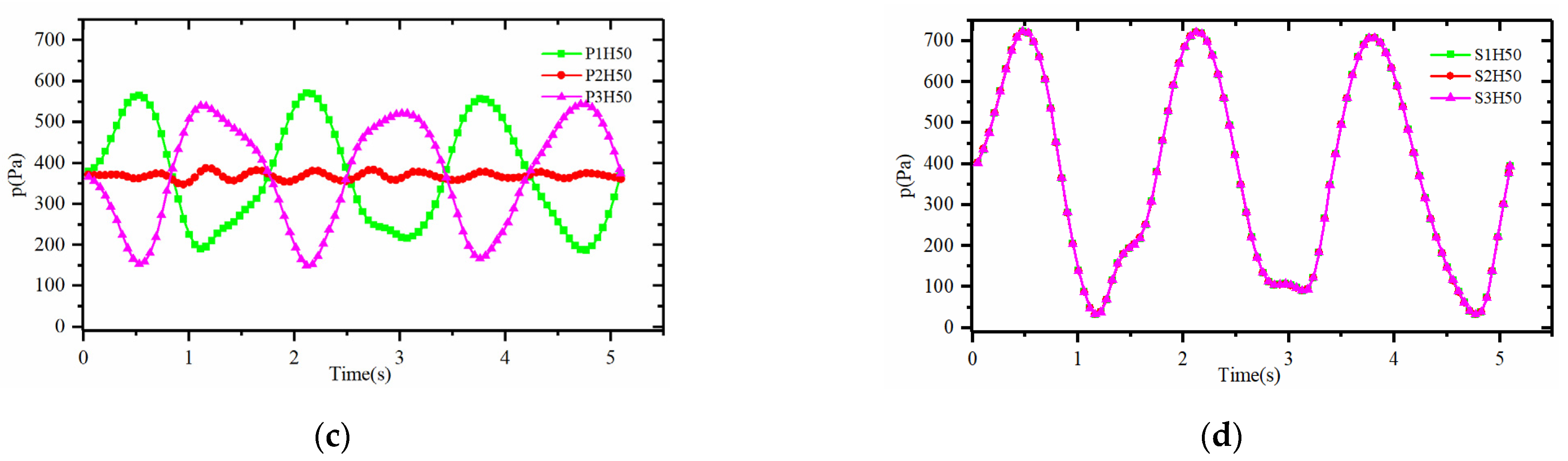
4.2. Liquid Sloshing Characteristics under Surge Excitation
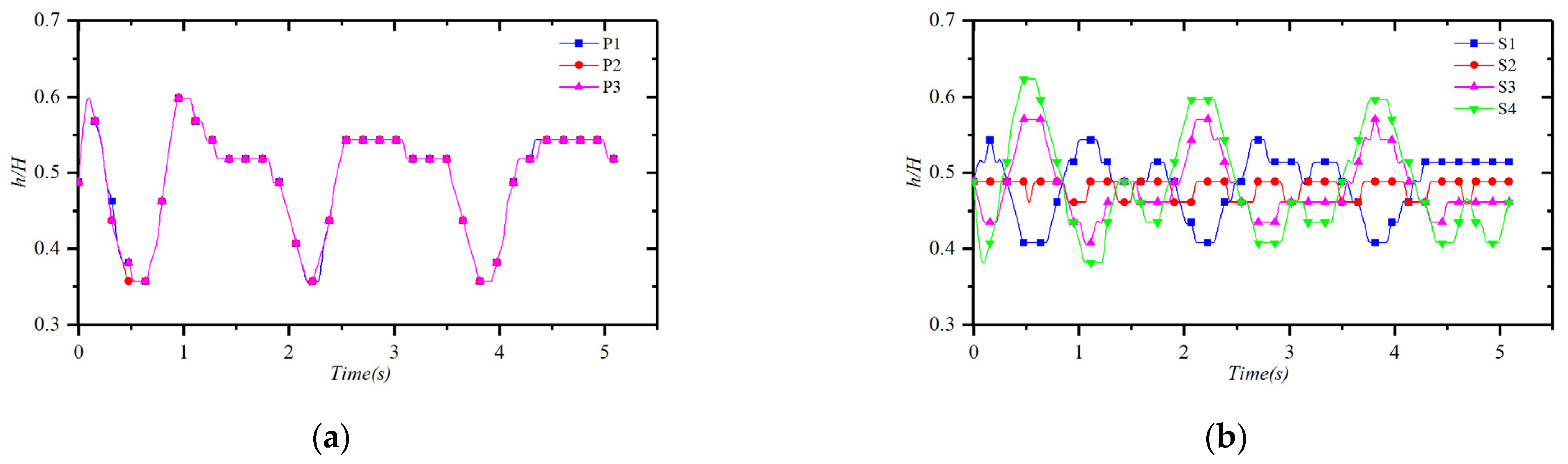
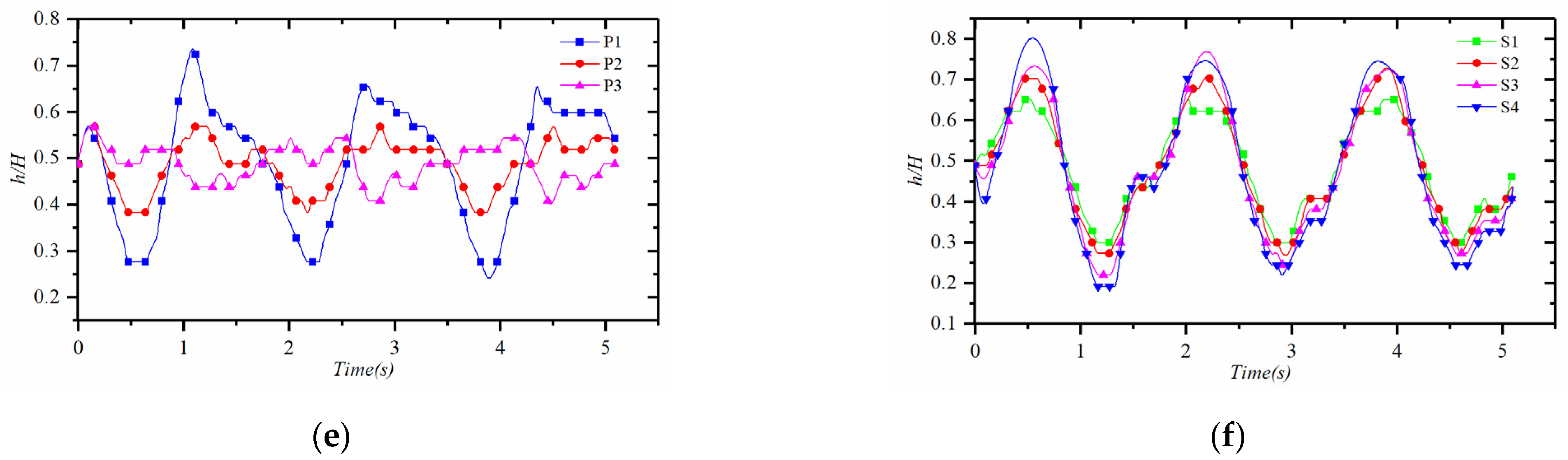
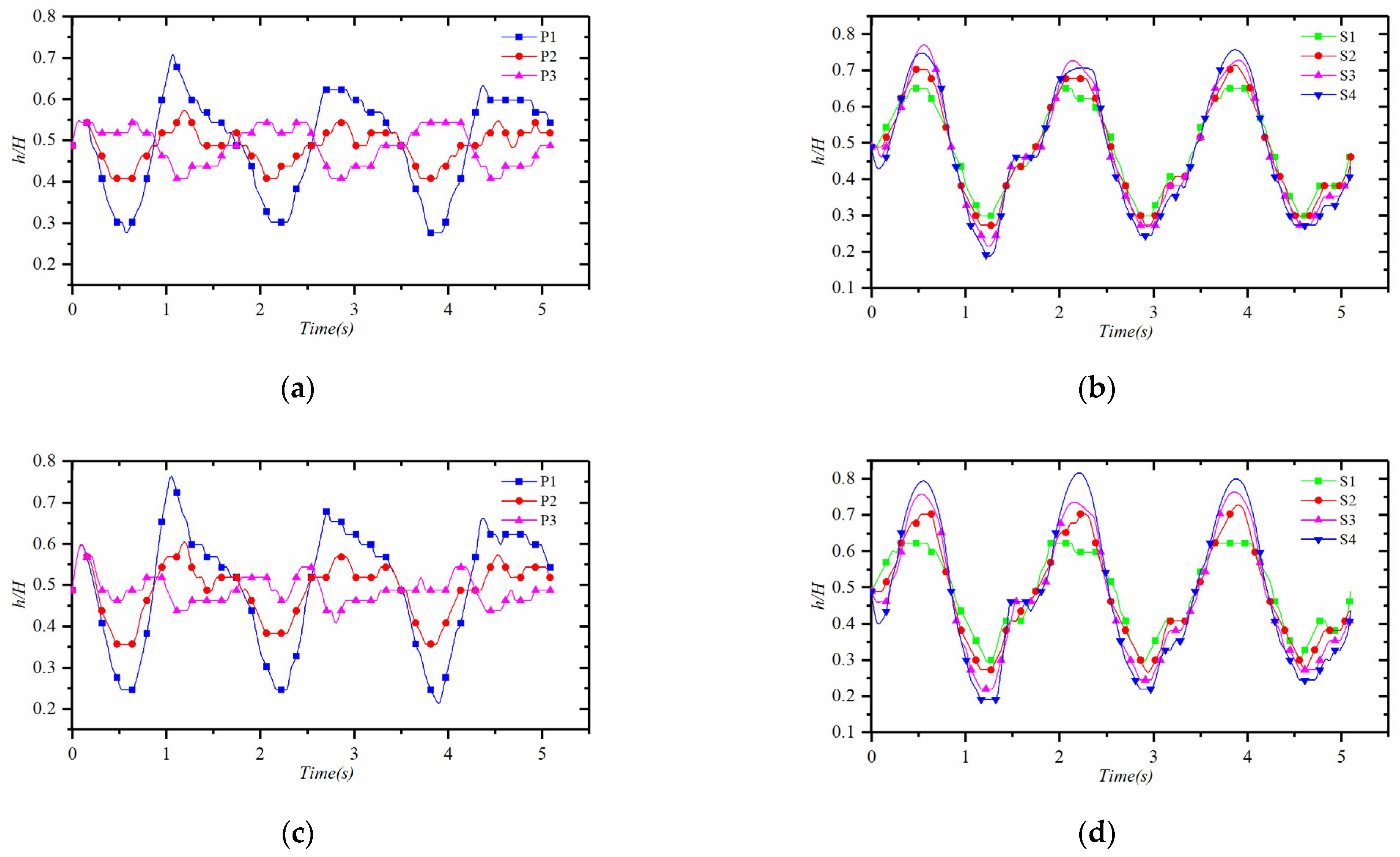
4.3. Liquid Sloshing Characteristics under Combination Excitation
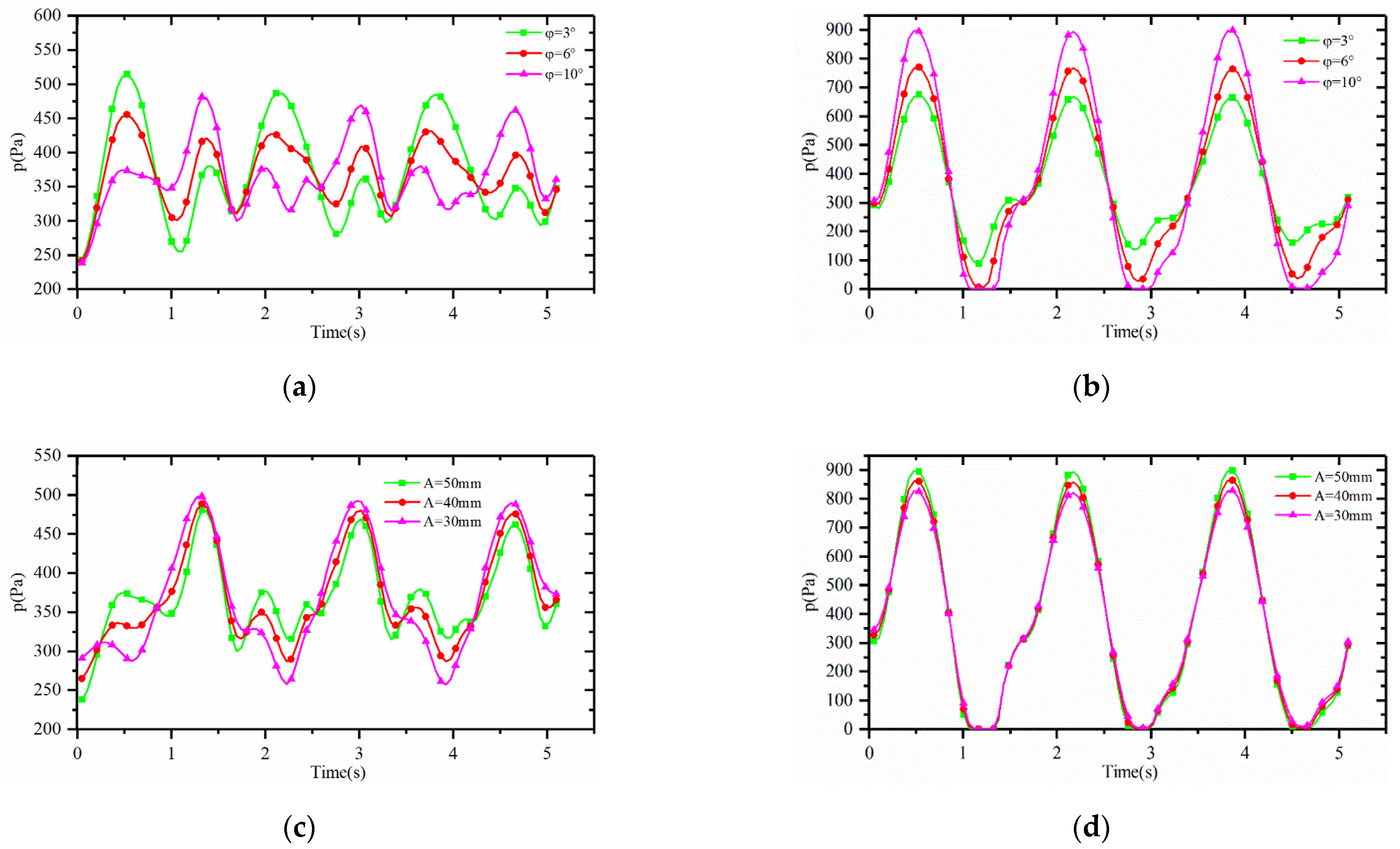
4.4. Effect of Combination Excitation Intensity on Liquid Sloshing
5. Conclusions
- (1)
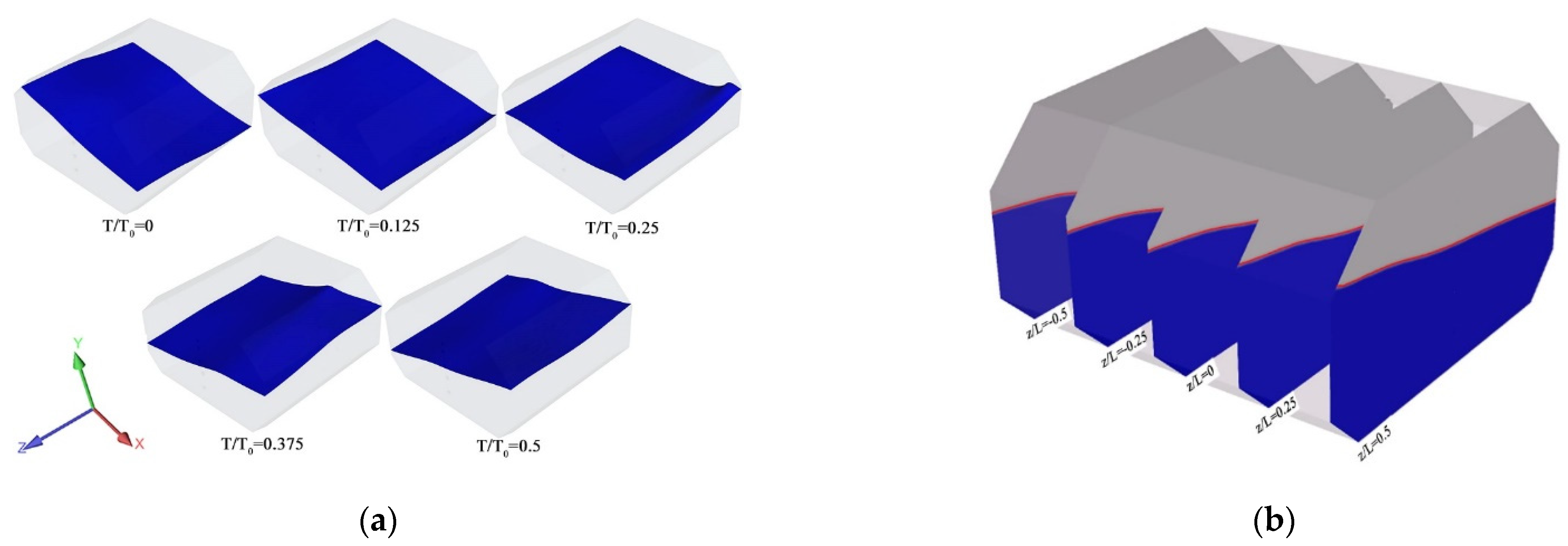
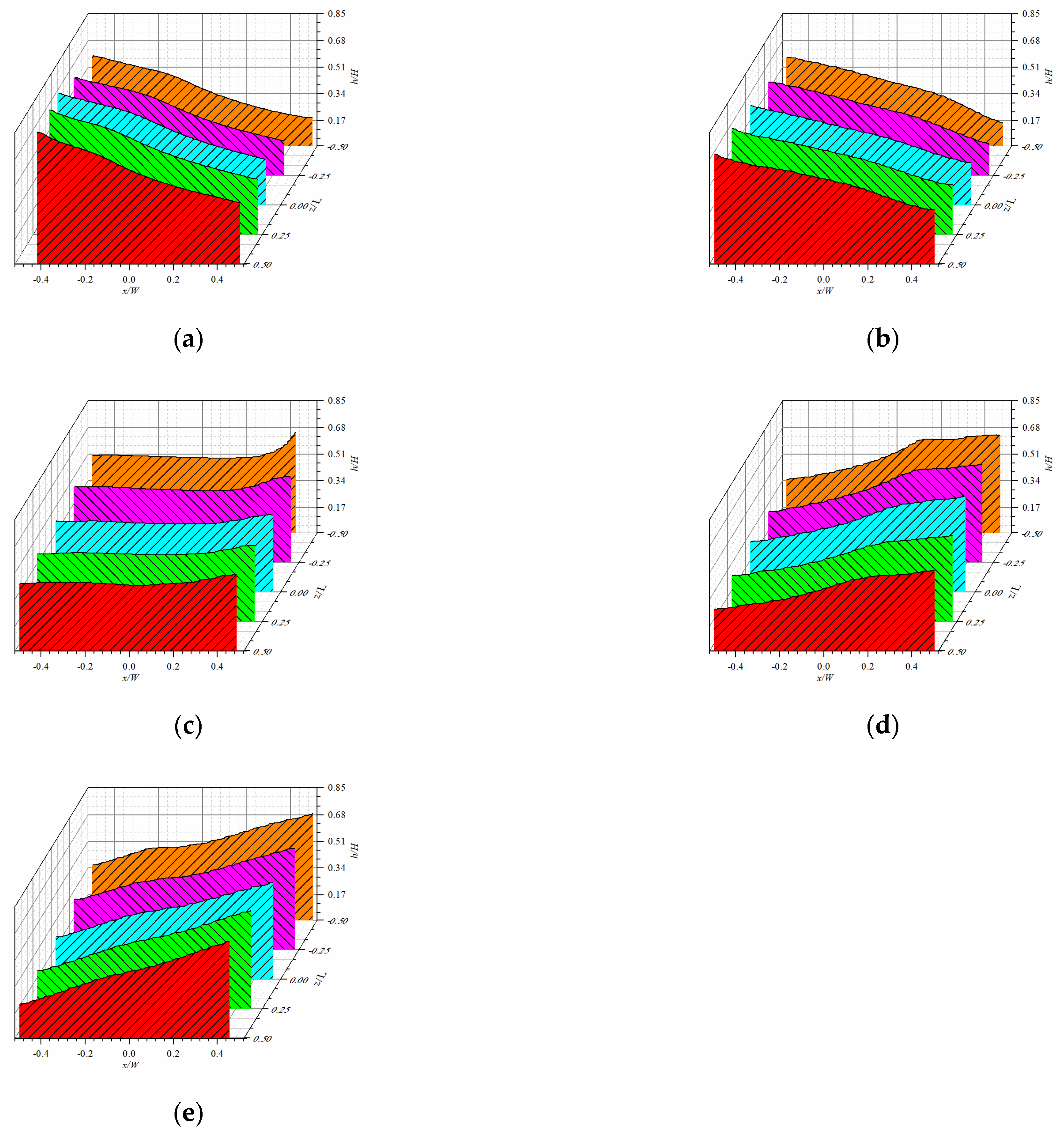
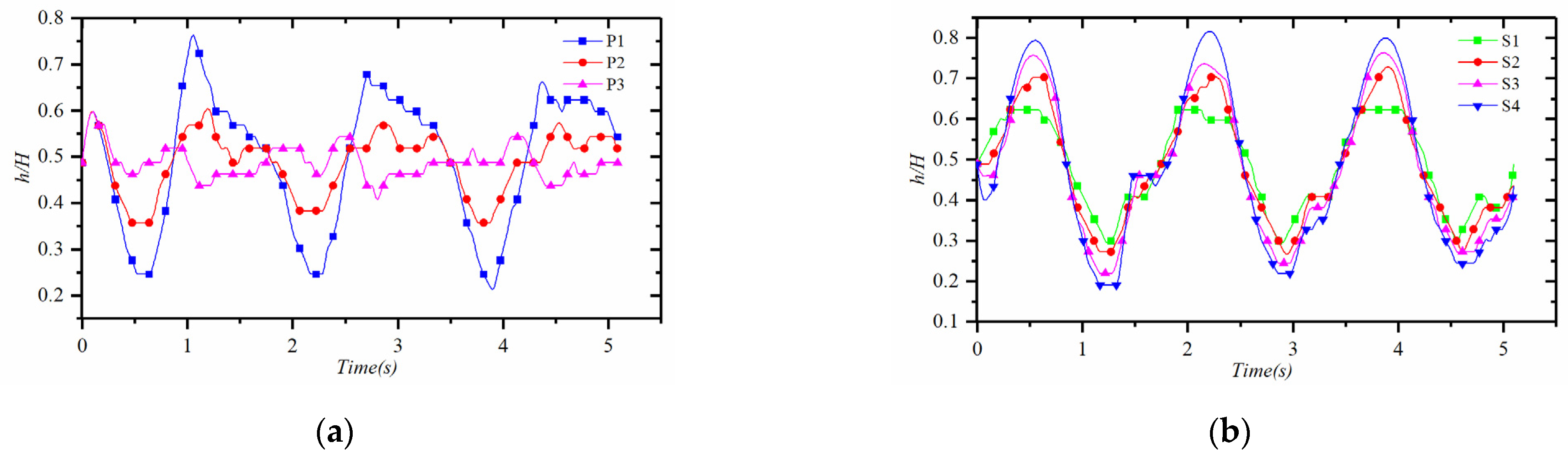
- The characteristics of the liquid level variations are obvious under excitation with a single degree of freedom. Meanwhile, the variation in the height of the liquid level noticeably increases with the intensity of single-degree-of-freedom excitation. Moreover, the pressure of the tank wall increases with sloshing. The height of the liquid level and the pressure of the wall have a linear increasing relationship with the sloshing intensity.
- (2)
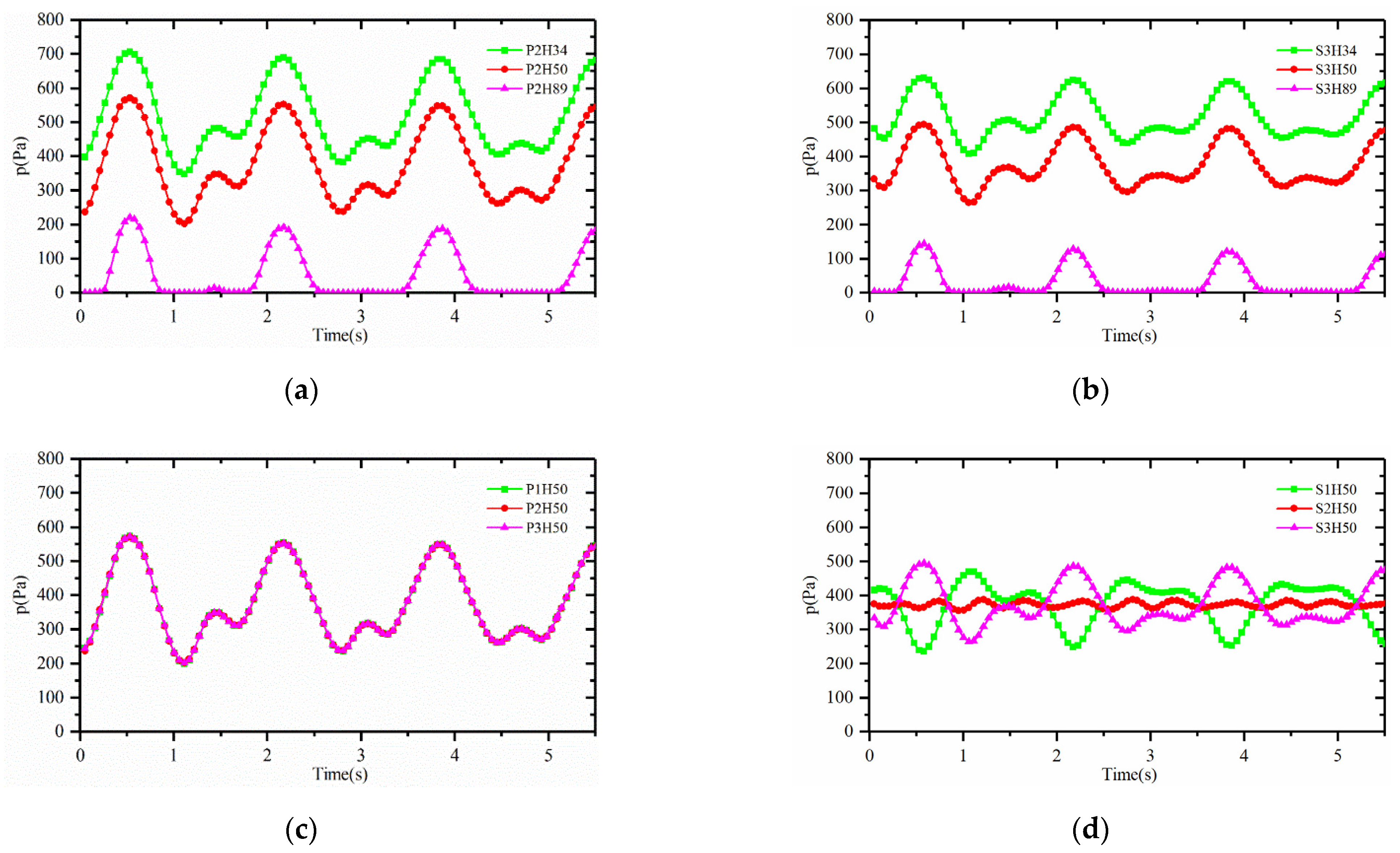
- The height of the liquid level varies periodically under the combination excitation. Furthermore, the liquid level in the cargo tank and the pressure of the wall vary more intensely compared with the single excitation. The peak pressure of the inner liquid, which is greater under the combination excitation, also changes significantly.
- (3)
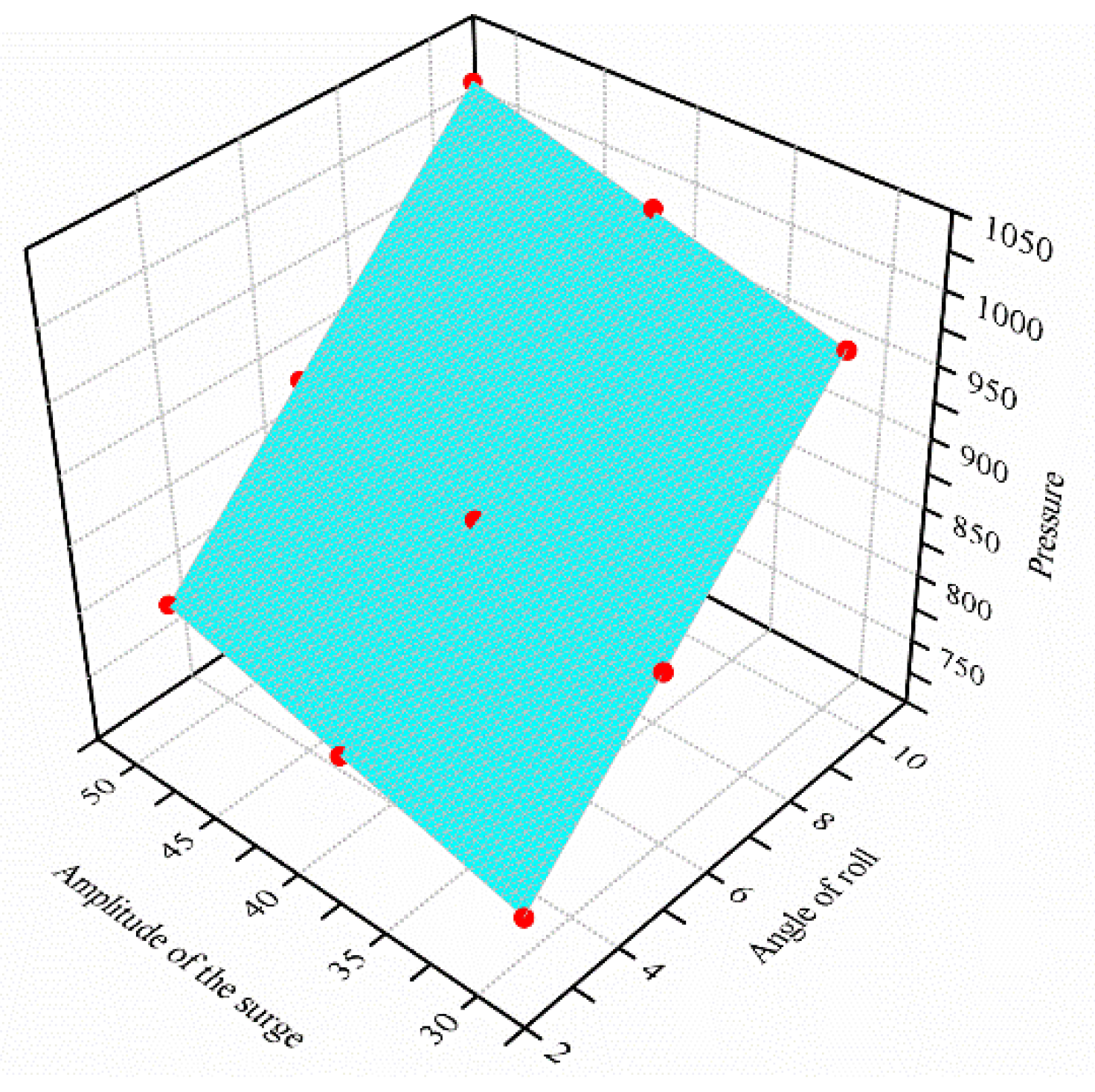
- When the liquid tank encounters the combination excitation (roll and surge), the angle of rolling has a great impact on the pressure of the inner wall of the liquid tank. There is a slight increase with the surge amplitude, and the change in the liquid level is also sensitive to the rolling angle, while the surge amplitude is not obvious. Under the combination excitation condition, the peak pressure at the lowest point of the tank diagonal increases linearly with increasing amplitude of the roll angle and the amplitude of the surge.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| u | Velocity of the flow field in the x-direction (m/s) | ||
| v | Velocity of the flow field in the y-direction (m/s) | ||
| Denomination (unit) | w | Velocity of the flow field in the z-direction (m/s) | |
| P | Internal pressure of an LNG ship (Pa) | λ | Amplitude of surging (mm) |
| H | Height of the cargo tank (m) | Vx | Velocity of the cargo tank in the x-direction (m/s) |
| S | Width of the cargo tank (m) | Vy | Velocity of the cargo tank in the y-direction (m/s) |
| L | Length of the cargo tank (m) | Vz | Velocity of the cargo tank in the z-direction (m/s) |
| μl | Viscosity of water (Pa·s) | T0 | Period of sloshing (s) |
| ρl | Density of water (kg/m3) | T | Time of cargo tank motion(s) |
| μL | Viscosity of water (Pa·s) | g | Acceleration of gravity (m/s2) |
| αl | Volume fraction of water (-) | Hi | Height of the surface P (-) |
| ul | Velocity of LNG (m/s) | f | Frequency of sloshing (Hz) |
| VOF | Volume of fluid method (-) | φ | Angle of rolling (°) |
| Re | Reynolds number (-) | Pi | Vertical lines of the surface P (-) |
| CSF | Continuum surface force (N) | Si | Horizontal line of the sidewall (-) |
References
- Moiseev, N.N. On the theory of nonlinear vibrations of a liquid of finite volume. J. Appl. Math. Mech. 1958, 22, 860–872. [Google Scholar] [CrossRef]
- Faltinsen, O.M. A nonlinear theory of sloshing in rectangular containers. J. Ship Res. 1974, 18, 224–241. [Google Scholar] [CrossRef]
- Faltinsen, O.M.; Timokha, A.N. A multimodal method for liquid sloshing in a two-dimensional circular tank. J. Fluid Mech. 2010, 665, 457–479. [Google Scholar] [CrossRef]
- Budiansky, B. Sloshing of Liquids in Circular Canals and Spherical Tanks. J. Aerosp. Sci. 1958, 27, 58. [Google Scholar] [CrossRef]
- Kim, D.H.; Kim, E.S.; Shin, S.-C.; Kwon, S.H. Sources of the Measurement Error of the Impact Pressure in Sloshing Experiments. J. Mar. Sci. Eng. 2019, 7, 207. [Google Scholar] [CrossRef]
- Trimulyono, A.; Hashimoto, H.; Matsuda, A. Experimental Validation of Single- and Two-Phase Smoothed Particle Hydrodynamics on Sloshing in a Prismatic Tank. J. Mar. Sci. Eng. 2019, 7, 247. [Google Scholar] [CrossRef]
- Yu, L.; Xue, M.-A.; Zheng, J. Experimental study of vertical slat screens effects on reducing shallow water sloshing in a tank under horizontal excitation with a wide frequency range. Ocean Eng. 2019, 173, 131–141. [Google Scholar] [CrossRef]
- Akyildiz, H.; Uenal, E. Experimental investigation of pressure distribution on a rectangular tank due to the liquid sloshing. Ocean Eng. 2005, 32, 1503–1516. [Google Scholar] [CrossRef]
- Zou, C.-F.; Wang, D.-Y.; Cai, Z.-H.; Li, Z. The effect of liquid viscosity on sloshing characteristics. J. Mar. Sci. Tech.-Jpn. 2015, 20, 765–775. [Google Scholar] [CrossRef]
- Doh, D.H.; Jo, H.J.; Shin, B.R.; Min, C.R.; Hwang, Y.S. Analysis of the Sloshing Flows of a LNG Cargo Tank. J. Therm. Sci. 2011, 20, 7. [Google Scholar] [CrossRef]
- Unal, U.O.; Bilici, G.; Akyildiz, H. Liquid sloshing in a two-dimensional rectangular tank: A numerical investigation with a T-shaped baffle. Ocean Eng. 2019, 187, 106183. [Google Scholar] [CrossRef]
- Chu, C.-R.; Wu, Y.-R.; Wu, T.-R.; Wang, C.-Y. Slosh-induced hydrodynamic force in a water tank with multiple baffles. Ocean Eng. 2018, 167, 282–292. [Google Scholar] [CrossRef]
- Zhu, A.; Xue, M.-A.; Yuan, X.; Zhang, F.; Zhang, W. Effect of Double-Side Curved Baffle on Reducing Sloshing in Tanks under Surge and Pitch Excitations. Shock Vib. 2021, 2021, 6647604. [Google Scholar] [CrossRef]
- Cho, I.H.; Choi, J.-S.; Kim, M.H. Sloshing reduction in a swaying rectangular tank by an horizontal porous baffle. Ocean Eng. 2017, 138, 23–34. [Google Scholar] [CrossRef]
- Tao, K.; Zhou, X.; Ren, H. A Local Semi-Fixed Ghost Particles Boundary Method for WCSPH. J. Mar. Sci. Eng. 2021, 9, 416. [Google Scholar] [CrossRef]
- Liu, D.; Lin, P. A numerical study of three-dimensional liquid sloshing in tanks. J. Comput. Phys. 2008, 227, 3921–3939. [Google Scholar] [CrossRef]
- Tang, Y.-y.; Liu, Y.-d.; Chen, C.; Chen, Z.; He, Y.-p.; Zheng, M.-m. Numerical study of liquid sloshing in 3D LNG tanks with unequal baffle height allocation schemes. Ocean Eng. 2021, 234, 109181. [Google Scholar] [CrossRef]
- Borg, M.G.; DeMarco Muscat-Fenech, C.; Tezdogan, T.; Sant, T.; Mizzi, S.; Demirel, Y.K. A Numerical Analysis of Dynamic Slosh Dampening Utilising Perforated Partitions in Partially-Filled Rectangular Tanks. J. Mar. Sci. Eng. 2022, 10, 254. [Google Scholar] [CrossRef]
- Hoch, R.; Wurm, F.H. Numerical and experimental investigation of sloshing under large amplitude roll excitation. J. Hydrodyn. 2021, 33, 787–803. [Google Scholar] [CrossRef]
- Xue, M.-A.; Jiang, Z.; Lin, P.; Zheng, J.; Yuan, X.; Qian, L. Sloshing dynamics in cylindrical tank with porous layer under harmonic and seismic excitations. Ocean Eng. 2021, 235, 109373. [Google Scholar] [CrossRef]
- Xin, J.J.; Chen, Z.L.; Shi, F.; Shi, F.L.; Jin, Q. Numerical simulation of nonlinear sloshing in a prismatic tank by a Cartesian grid based three-dimensional multiphase flow model. Ocean Eng. 2020, 213, 107629. [Google Scholar] [CrossRef]
- Brackbill, J.U.; Kothe, D.B.; Zemach, C. A continuum method for modeling surface tension. J. Comput. Phys. 1992, 100, 335–354. [Google Scholar] [CrossRef]
- Jung, J.H.; Yoon, H.S.; Lee, C.Y.; Shin, S.C. Effect of the vertical baffle height on the liquid sloshing in a three-dimensional rectangular tank. Ocean. Eng. 2012, 44, 79–89. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Roll Angle φ (°) | Surge Amplitude λ (mm) | Frequency f (Hz) | Filling Rate |
|---|---|---|---|---|
| Roll excitation | 10 | - | 0.58 | 0.5 |
| Surge excitation | - | 50 | 0.58 | 0.5 |
| Combination excitation | 10 | 50 | 0.58 | 0.5 |
| Type | Roll Angle φ (°) | Surge Amplitude λ (mm) | Frequency f (Hz) | Filling Rate |
|---|---|---|---|---|
| Roll excitation | 10 | - | 0.58 | 0.5 |
| Surge excitation | - | 50 | 0.58 | 0.5 |
| Combination excitation | 3, 6, 10 | 30, 40, 50 | 0.58 | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Shui, B.; Zhu, H. Study on Sloshing Characteristics in a Liquid Cargo Tank under Combination Excitation. J. Mar. Sci. Eng. 2022, 10, 1100. https://doi.org/10.3390/jmse10081100
Zhang Q, Shui B, Zhu H. Study on Sloshing Characteristics in a Liquid Cargo Tank under Combination Excitation. Journal of Marine Science and Engineering. 2022; 10(8):1100. https://doi.org/10.3390/jmse10081100
Chicago/Turabian StyleZhang, Qiong, Bo Shui, and Hanhua Zhu. 2022. "Study on Sloshing Characteristics in a Liquid Cargo Tank under Combination Excitation" Journal of Marine Science and Engineering 10, no. 8: 1100. https://doi.org/10.3390/jmse10081100
APA StyleZhang, Q., Shui, B., & Zhu, H. (2022). Study on Sloshing Characteristics in a Liquid Cargo Tank under Combination Excitation. Journal of Marine Science and Engineering, 10(8), 1100. https://doi.org/10.3390/jmse10081100